Область изобретения. Изобретение относится к устройству и способам, используемым, например, в кориолисовом удельном массовом расходомере для того, чтобы по существу исключить вызванные температурой ошибки измерения, которые в противном случае создаются за счет разницы в работе имеющихся в расходомере двух отдельных входных канальных схем.
Уровень техники. Известные кориолисовы расходомеры пользуются повышенным спросом в широком разнообразии коммерческих применений для точного измерения расхода различных рабочих текучих сред.
Вообще говоря, кориолисов удельный массовый расходомер, такой как описан в патенте США 4491025 (выдан Дж.Е.Смиту 1 января 1985 г. и принадлежащий настоящему заявителю, далее называемый патентом Смита '025), содержит один или два трубопровода, каждый из которых обычно представляет собой U-образный проточный трубопровод или трубку. Как говорится в патенте Смита '025, каждый проточный трубопровод приводится в колебательное движение относительно оси с целью создания вращающейся системы отсчета. Для U-образного проточного трубопровода эта ось может называться осью изгиба. Когда рабочая текучая среда протекает через каждый колеблющийся трубопровод, ее движение создает кориолисовы силы реакции, которые перпендикулярны как скорости текучей среды, так и угловой скорости трубопровода. Эти кориолисовы силы реакции, хоть и довольно малые по сравнению с силой, с которой трубопроводы приводятся в движение, тем не менее заставляют каждый трубопровод закручиваться относительно оси кручения, которая для U-образного трубопровода перпендикулярна оси изгиба. Степень закручивания каждого трубопровода соответствует расходу массы протекающей по нему рабочей текучей среды. Это кручение часто измеряют с помощью сигналов скорости, получаемых от магнитных датчиков скорости, которые установлены на один или оба трубопровода с целью получения полного профиля скорости движения каждого проточного трубопровода относительно любого другого трубопровода или неподвижной системы отсчета. В кориолисовых расходомерах с двумя трубопроводами оба проточных трубопровода приводятся в движение в противоположных направлениях, так что каждый трубопровод колеблется (вибрирует) как отдельный зубец настроечной вилки. Эта работа в качестве "настроечной вилки" успешно снимает по существу все нежелательные вибрации, которые в противном случае могут накладываться на кориолисову силу.
В таком кориолисовом расходомере удельный массовый расход текучей среды, проходящей через расходомер, в основном пропорционален временному интервалу (так называемой величине Δt), который проходит, начиная с того момента, когда одна точка, находящаяся на боковой опоре проточного трубопровода, пересекает заранее заданное место, например соответствующую среднюю плоскость колебаний, до того момента, когда соответствующая точка, находящаяся на противоположной боковой опоре, того же самого проточного трубопровода пересекает ее соответствующее место, например ее соответствующую среднюю плоскость колебаний. Для кориолисовых удельных массовых расходомеров с двойным трубопроводом этот интервал в общем равен разности фаз между сигналами скорости, создаваемых для обоих проточных трубопроводов на основной (резонансной) частоте, с которой они приводятся в движение. Кроме того, резонансная частота, с которой колеблется каждый проточный трубопровод, зависит от суммарной массы этого трубопровода, то есть от массы самого трубопровода, когда от пуст, и от массы любой протекающей по нему текучей среды. Поскольку суммарная масса изменяется как плотность протекающей по трубопроводу текучей среды, то резонансная частота подобным образом изменяется при любом изменении плотности текучей среды и, следовательно, может использоваться для отслеживания изменений плотности текучей среды.
В течение некоторого времени считалось, что оба сигнала скорости должны обрабатываться в, по меньшей мере, некоторой аналоговой схеме с целью создания выходных сигналов, пропорциональных удельному массовому расходу рабочей текучей среды. В частности, выходной сигнал, соответствующий каждому датчику скорости, просто подается в аналоговую схему, например в интегратор с последующим детектором нулевого пересечения (компаратором), содержащуюся в соответствующем отдельном входном канале. См. патенты США 4879911 (выдан М.Дж. Золоку 14 ноября 1989 г.), 4872351 (выдан Дж.Р.Раесчу 10 октября 1989 г.), 4843890 (выдан А. Л.Сэмсону 4 июля 1989 г) и 4422338 (выдан Дж.Е. Смиту 27 декабря 1983 г. ), принадлежащие настоящему заявителю. Несмотря на то, что различные подходы к данной проблеме, изложенные в этих патентах, дают достаточно точные результаты в широкой области применений, описанные в них расходомеры, как и аналогичные известные кориолисовы расходомеры, имеют один общий недостаток, который затрудняет их использование.
А именно, кориолисовы удельные массовые расходомеры работают за счет определения очень малой межканальной разности фаз между сигналами, создаваемыми обоими датчиками скорости, то есть величины Δt, и за счет преобразования этой разности в сигнал, пропорциональный удельному массовому расходу. Хотя и кажется, что величина Δt получается из измерения временной разности, на самом деле она является результатом фазового измерения. Использование такого измерения временной разницы обеспечивает способ точного измерения проявления разности фаз, возникающей между сигналами датчиков скорости. В недавно изготовленных настоящим патентовладельцем кориолисовых расходомерах эта разность при максимальном расходе оказывается порядка 130 с-1. Каждый входной канал кориолисова расходомера вносит свою внутреннюю фазовую задержку в свой входной сигнал. В то время как величина этой задержки в общем довольно мала, она часто бывает значительной по сравнению с малой межканальной разностью фаз, то есть 130 с-1 и менее, которая и определяется. Доступные в настоящее время кориолисовы расходомеры основаны на предположении того, что каждый входной канал вносит конечную и фиксированную величину фазовой задержки в соответствующий сигнал скорости. А раз так, то эти кориолисовы расходомеры обычно основываются на первоначальном измерении в условиях истинного нулевого потока во время калибровки расходомера, а не на межканальной разности фаз (Δt) или на показаниях удельного массового расхода. Следовательно, при измерении реального расхода эти расходомеры вычитают тем или иным способом эту величину либо из измеренной Δt, либо из величины удельного массового расхода, чтобы получить явно точную величину удельного массового расхода протекающей рабочей текучей среды.
К сожалению, на практике это предположение оказывается неточным. Во-первых, каждый входной канал часто дает не только различную величину внутренней фазовой задержки, поскольку фазовая задержка, которая создается каждым каналом, зависит от температуры и изменяется по разному при переходе от одного канала к другому при соответствующем изменении температуры. Эта температурная изменчивость приводит к температурной межканальной разности фаз. Поскольку измеряемая разность фаз (Δt), получаемая из реального потока через расходомер, относительно мала, то ошибка измеренной разности фаз между сигналами скорости, обусловленная температурной межканальной разностью фаз, может в некоторых случаях быть значительной. Эта ошибка обычно не учитывается в доступных в настоящее время кориолисовых удельных массовых расходомерах. В конкретных обстоятельствах эта ошибка может вносить заметную зависящую от температуры ошибку в измерения удельного массового расхода, искажая тем самым эти измерения.
Одним хорошо известным способом исключения этой ошибки является размещение смонтированного трубчатого кориолисова расходомера вместе с электроникой в корпусе с управляемой температурой. Этот способ, предохраняющий расходомер от воздействия внешних температурных изменений и сохраняющий его в процессе работы при относительно постоянной температуре, резко увеличивает установочные затраты и поэтому подходит не для каждого применения. Следовательно, там, где установочные затраты критичны, этот способ обычно не используется. В частности, в таких применениях и особенно там, где расходомер должен находиться в помещении и не подвергаться большим температурным изменениям, ошибка измерений за счет температурной межканальной разности фаз, хоть в общем и предполагается, но остается достаточно малой и относительно постоянной. Раз так, то эта ошибка обычно приемлема для пользователя. К сожалению, в других применениях, где расходомер не закрыт температурно управляемым корпусом, такие как применения на открытом воздухе, где расходомер подвергается большим колебаниям рабочей температуры, ошибка обычно изменяется и может стать значительной, что необходимо принимать во внимание.
Кроме ошибок за счет температурной межканальной разности фаз множество доступных кориолисовых удельных массовых расходомеров, к сожалению, имеют дополнительный источник неточности измерений, связанный с температурой. В частности, кориолисовы расходомеры обычно измеряют температуру проточного трубопровода и за счет изменений упругости проточного трубопровода с температурой соответственно изменяют величину измерительного коэффициента на основании текущей температуры трубопровода. Этот измерительный коэффициент после изменения используется для пропорционального отношения величины межканальной разности фаз (Δt) к удельному массовому расходу. Температура проточного трубопровода измеряется за счет оцифровывания выхода подходящего аналогового температурного датчика, такого как платиновый РТД (резистивный температурный датчик), который установлен на внешней поверхности проточного трубопровода. Оцифрованный выход обычно имеет вид частотного сигнала, зачастую выработанного с помощью преобразователя напряжения в частоту (V/F), который суммирован (сосчитан) в заданном временном интервале с целью получения накопленной цифровой величины, пропорциональной температуре проточного трубопровода. К сожалению, на практике V/F-преобразователи обычно обладают некоторым температурным дрейфом, который на основании величины изменения окружающей температуры может привести к ошибке измерения температуры проточного трубопровода до нескольких градусов. Эта ошибка, в свою очередь, будет искажать удельный массовый расход.
Решение, предлагаемое известным уровнем техники для явного получения температурнозависимых изменений в работе входных каналов кориолисовых измерителей, описано в патенте США 4817448 (выдан Дж.В. Харгартену и др. 4 апреля 1989 г.), принадлежащем настоящему заявителю и называемом здесь патентом Харгартена '448. Этот патент (прототип) описывает двухканальную схему переключения входов для кориолисова расходомера. В частности, эта схема содержит двухполюсный переключающий в двух направлениях переключатель на полевых транзисторах, расположенный между выходами датчиков скорости и входами обоих каналов. В одном положении полевой переключатель соединяет выходы левого и правого датчиков скорости с соответствующими входами левого и правого каналов, а в другом положении эти соединения меняются местами. Переключатель приводится в действие с целью изменения его положения в каждом последовательном цикле движения проточного трубопровода. Таким образом, выход каждого датчика скорости подается поочередно на оба канала. За два цикла соответствующие временные интервалы измеряются с учетом сигналов скорости, прикладываемых к обоим каналам, а затем усредняемых для получения величины временного интервала одного цикла, за которой исключены ошибки, присущие каждому отдельному каналу. Эта результирующая величина временного интервала используется затем для определения удельного массового расхода.
Несмотря на то, что это решение и в самом деле по существу исключает температурные межканальные разности фаз, оно имеет недостаток, который несколько ограничивает возможность его использования. А именно, входные схемы в устройстве по патенту '448 Харгартена и др. не имеют интеграторов. За счет отсутствия какой бы то ни было фильтрации нижних частот, которая могла бы осуществляться интеграторами, эти входные схемы восприимчивы к шуму. К сожалению, схема переключения, предложенная в этом патенте, не позволяет ввести интеграторы в переключаемую часть входной схемы, что требует, чтобы для стойкости к шумам интегратор включался после переключателя на полевых транзисторах. К сожалению, здесь вносимая интегратором фазовая задержка не может быть компенсирована. Поскольку интегратор представляет собой наибольший источник фазовой задержки входной схемы, то введение такого интегратора может вызывать ошибку, то есть некомпенсированную фазовую задержку, измеренных величин Δt. Более того, эта фазовая задержка должна также изменяться с температурой. Следовательно, результирующие измеренные величины расхода будут содержать ошибку. Таким образом, понятно, что решение, предложенное в патенте '448 Харгартеном и др., ограничено сравнительно малошумящими условиями.
Поэтому есть необходимость создания кориолисова расходомера, который обеспечивал бы точные величины расхода и скорости потока, по существу нечувствительные к изменениям окружающей температуре и, следовательно, не создающие нежелательные температурные эффекты и обеспечивающие значительную устойчивость к шумам. Такой расходомер должен иметь лишь самую незначительную температурную погрешность измерения при сравнительно больших изменениях окружающей температуры, позволяя тем самым высокоточные измерения расхода в широком разнообразии применений практически без необходимости заключения его в корпус с управляемой температурой. Повышенная точность измерений и экономия установочных затрат такого расходомера позволяют значительно расширить диапазон его применений.
Сущность изобретения.
Первым объектом настоящего изобретения является способ определения величины механического нуля кориолисова измерителя, предназначенного для измерения удельного расхода протекающей через него текучей среды, заключающийся в приведении в колебательное движение по меньшей мере одного проточного трубопровода измерителя, формирования первого и второго сигналов движения соответствующих участков трубопровода и измерении последовательных временных интервалов между соответствующими значениями первого и второго сигналов, отличающийся тем, что колебательное движение трубопровода осуществляют при отсутствии потока рабочей текучей среды через измеритель, для измеренного в отсутствии расхода текучей среды множества величин временных интервалов определяют значение стандартного отклонения этих величин, по измеренным величинам временных интервалов определяют текущую величину механического нуля измерителя при отсутствии расхода текучей среды через измеритель, если значение стандартного отклонения набора измеренных временных интервалов меньше заданной предельной величины, для последующей компенсации величин временных интервалов, определяющих удельный расход текучей среды, протекающей через измеритель.
Заявленный первый объект изобретения отличается также тем, что при отсутствии расхода текучей среды через измеритель число измеренных временных интервалов в множестве для вычисления промежуточной величины механического нуля определяют как наименьшее из либо заранее заданного максимального числа измеренных в отсутствии расхода величин временных интервалов, либо суммарного числа измеренных в отсутствии расхода величин временных интервалов, которые были измерены до достижения их стандартным отклонением величины, меньшей заранее заданного предела сходимости.
Согласно первому объекту изобретения измеряют по меньшей мере заданное минимальное число последовательных временных интервалов.
В заявленном первом объекте изобретения при определении текущей величины механического нуля вычисляют промежуточную величину как среднее значение величин временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель.
Согласно первому объекту изобретения при определении измеренного в отсутствии расхода множества временных интервалов обновляют значение стандартного отклонения измеренных величин для каждой последовательно измеренной в отсутствии расхода величины временного интервала.
Заявленный первый объект изобретения отличается также тем, что заданная предельная величина отклонения представляет целое число, кратное пределу сходимости.
В заявленном первом объекте изобретения при определении текущей величины механического нуля формируют промежуточную величину механического нуля на основе измеренного в отсутствии расхода множества временных интервалов и устанавливают величину механического нуля равной промежуточному значению, если стандартное отклонение множества измеренных временных интервалов меньше заданной предельной величины.
Согласно первому объекту изобретения величину механического нуля устанавливают равной промежуточному значению при нахождении последнего в заданном диапазоне таких значений.
Заявленный первый объект изобретения отличается также тем, что при определении текущего значения величины механического нуля вычисляют промежуточную величину как среднее значение величин временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель.
В заявленном первом объекте изобретения при определении множества измеренных в отсутствии расхода величин временных интервалов обновляют значение стандартного отклонения измеренных величин для каждой последовательно измеренной в отсутствии расхода величины временного интервала.
Заявленный в качестве первого объекта изобретения упомянутый способ отличается также тем, что заданная предельная величина стандартного отклонения представляет целое число, кратное пределу сходимости.
Вторым объектом настоящего изобретения является кориолисов измеритель для измерения удельного расхода протекающей через него рабочей текучей среды, содержащий по меньшей мере один проточный трубопровод (130), средство (180) приведения трубопровода в колебательное движение, средство (160R, 160L) обнаружения движения трубопровода с формированием первого и второго сигналов движения, связанный со средством обнаружения блок (30) обработки первого и второго сигналов движения для определения величины удельного расхода, включающий средство (70, 80) измерения множества последовательных временных интервалов между соответствующими значениями первого и второго сигналов, отличающийся тем, что средство (70, 80) измерения выполнено с возможностью измерения временных интервалов при отсутствии расхода рабочей текучей среды через измеритель, формирования текущей величины механического нуля измерителя на основе множества измеренных величин временных интервалов, если стандартное отклонение меньше заданной предельной величины, для последующей компенсации величин временных интервалов при определении величины удельного расхода рабочей текучей среды через измеритель.
Заявленный второй объект изобретения отличается также тем, что средство (70, 80) измерения выполнено с возможностью определения из множества измеренных в отсутствии расхода величин временных интервалов промежуточной величины механического нуля как наименьшей либо из заранее заданного числа измеренных в отсутствии расхода величин временных интервалов, либо из суммарного числа измеренных в отсутствии расхода величин временных интервалов, которые были измерены до достижения их стандартным отклонением величины, меньшей заранее заданного предела сходимости.
В заявленном втором объекте изобретения средство (70, 80) измерения выполнено с возможностью определения, по меньшей мере, заданного минимального числа последовательных временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель.
Заявленный второй объект изобретения отличается также тем, что средство (70, 80) измерения выполнено с возможностью вычисления промежуточной величины как среднего значения величин временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель, при определении текущего значения величины механического нуля измерителя.
В заявленном втором объекте изобретения средство (70, 80) измерения выполнено с возможностью обновления величины стандартного отклонения множества величин временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель, для каждой последовательно измеренной величины временных интервалов.
Заявленный второй объект изобретения отличается также тем, что заданная предельная величина представляет целое число, кратное пределу сходимости.
Согласно второму объекту изобретения средство (70, 80) измерения выполнено с возможностью формирования промежуточной величины механического нуля измерителя на основе множества величин временных интервалов, измеренных при отсутствии расхода рабочей текучей среды через измеритель, и установки величины механического нуля равной полученной промежуточной величине, если стандартное отклонение для такого множества временных интервалов меньше заданной предельной величины.
Заявленный второй объект изобретения отличается также тем, что средство (70, 80) измерения выполнено с возможностью установки полученной величины механического нуля, равной промежуточной величине, если последняя находится в пределах заданного диапазона.
В заявленном втором объекте изобретения средство (70, 80) измерения выполнено с возможностью вычисления промежуточной величины как среднего значения величин временных интервалов, измеренных при отсутствии расхода текучей среды через измеритель.
Согласно второму объекту изобретения средство (70, 80) измерения выполнено с возможностью обновления величины стандартного отклонения измеренных величин временных интервалов для каждой последовательно измеренной величины временных интервалов.
Заявленный второй объект изобретения отличается также тем, что заданная предельная величина представляет целое число, кратное пределу сходимости.
Конкретной целью настоящего изобретения является создание такого кориолисового расходомера, для которого в значительной степени, а то и полностью, исключалась бы необходимость использования корпуса с управляемой температурой и который выполнял бы точные измерения, по существу не зависящие от изменения температуры окружающей среды.
Другой конкретной целью настоящего изобретения является создание кориолисова расходомера, в котором измеренные величины расхода и скорости потока не имели бы значительной погрешности, которая могла бы в противном случае быть вызвана переходными процессами переключения входных каналов.
Эти и другие цели достигаются в соответствии с настоящим изобретением за счет циклической работы каждого канала, использующей, в частности, сравнительно короткий период между (a) измерением внутренней фазовой задержки данного канала и (b) измерением исходных, вызванных потоком, величин Δt. Исходные величины затем компенсируются обычно за счет вычитания из них измеренной фазовой задержки с целью получения скорректированной величины t. Затем с помощью скорректированных в отличие от известного уровня техники исходных величин Δt определяется удельный массовый расход.
Именно два одинаковых входных канала (т.е. левый и правый), какие обычно использовались в известных кориолисовых расходомерах, заменены двумя парами входных каналов (т.е. парами A-C и B-C), которые позволяют измерять текущую внутреннюю фазовую задержку, вносимую каждой парой каналов. Каждая из пар каналов приводится в действие, циклически переключаясь с измерения своей собственной внутренней задержки, т. е. с режима "нулевого измерения", на измерение величин Δt для условий реального потока, т.е. на режим "измерения". При достаточно короткой длительности цикла текущая величина фазовой задержки точно отражает любые температурные изменения работы каждой пары каналов. Если известна величина внутренней фазовой задержки, ее можно использовать для корректировки вызванных расходом величин Δt , последовательно создаваемых этой парой во время следующего режима измерения. Поскольку основанные на потоке измерения Δt , обеспечиваемые каждой парой каналов, корректируются для текущей внутренней фазовой задержки, соответствующей каждой конкретной паре, то эти величины Δt не содержат никаких температурных ошибок независимо от температуры окружающей расходомер среды и ее изменений. Раз так, то кориолисов расходомер, соответствующий настоящему изобретению, может с успехом использоваться в средах с сильно изменяющейся температурой без сколько-нибудь заметного ухудшения точности за счет температурных изменений.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения новая схема измерения расхода использует три отдельных аналогичных входных канала (т.е. каналы A, B и C), с помощью которых последовательно и поочередно для каждой из двух пар, т.е. пар A-C и B-C из трех каналов, проводятся измерения межканальной разности фаз. Канал C служит в качестве эталонного канала, в который в качестве входного сигнала постоянно подается один из двух сигналов датчиков скорости и специально для целей предпочтительного варианта осуществления настоящего изобретения подается сигнал левого датчика скорости. Входом каналов A и B является сигнал либо левого, либо правого датчика скорости. В то время как и нулевой, так и измерительный режимы включают в себя измерения межканальной разности фаз в паре каналов, принципиальным отличием между режимами является то, что в нулевом режиме в оба канала пары подается один и тот же сигнал датчика скорости, так что измерение результирующей межканальной разности фаз дает измерение внутренней фазовой задержки этой пары, в то время как в измерительном режиме левый и правый сигналы скорости подаются в разные соответствующие каналы этой пары, чтобы обеспечить измерение, хоть и не корректированное, текущей основанной на потоке величины Δt для последующего использования в определении текущих величин массового расхода и скорости потока. Хотя измерения межканальной разности фаз (Δt) проводятся в обоих режимах, во избежание недоразумений следует понимать разницу между этими величинами в смысле причин их появления. В дальнейшем описании фазовые измерения, производимые в нулевом режиме, называются измерениями межканальной разности фаз, а производимые в измерительном режиме - измерениями величин Δt .
А именно, для любой пары каналов, работающих в нулевом режиме, такой как пара A-C, один и тот же, т.е. левый, сигнал датчика скорости подается на входы обоих каналов пары. Затем во время так называемого интервала "обнуления" с усреднением за время этого интервала последовательно и повторно проводятся изменения межканальной разности фаз. Идеально, если оба канала этой пары дают одну и ту же внутреннюю фазовую задержку, т.е. если фазовая задержка в канале А равна фазовой задержке в канале C, тогда все измерения межканальной разности фаз будут равны нулю. Однако на самом деле в любой момент времени все три канала имеют различные внутренние фазовые задержки. Тем не менее, поскольку фазовая задержка для каждой пары измерена относительно одного эталонного канала, т.е. канала C, то любые отличия в фазовой задержке между двумя парами каналов вызваны отличиями во внутренней фазовой задержке между каналами A и B. По окончании интервала "обнуления" вход не эталонного канала этой пары переключается на другой сигнал датчика скорости, т. е. на правый сигнал датчика скорости. Затем проходит конечный, то есть включающий в себя так называемый интервал "переключения", период времени прежде, чем эта пара каналов начнет работать в "измерительном" режиме, во время которого измеряются вызванные расходом величины Δt. Интервал переключения достаточно длителен, чтобы позволить закончиться всем связанным с переключением переходным процессам.
В то время как одна пара каналов, например A-C, работает в нулевом режиме, другая пара, например B-C, работает в измерительном режиме, чтобы обеспечить непрерывное измерение расхода. Для любой пары каналов каждая последующая текущая обусловленная потоком величина Δt, полученная во время измерительного режима, компенсирована обычно за счет вычитания наиболее свежей величины внутренней фазовой задержки, которая была измерена для этой пары каналов во время предыдущего нулевого режима.
Время, в течение которого одна пара каналов работает в измерительном режиме, т. е. измерительный интервал, равно всему тому времени, в течение которого другая пара работает в нулевом режиме. Это последнее время включает в себя время, в течение которого последний канал переключает свой не эталонный вход с правого на левый сигнал датчика скорости, затем проводит обнуление и, наконец, переключает свой не эталонный вход обратно с левого на правый сигнал датчика скорости.
По окончании измерительного интервала пары каналов просто переключают режимы, так что взятая для примера пара каналов B-C сначала переключает свой вход не эталонного канала с правого на левый сигнал датчика скорости, а пара каналов A-C начинает измерения Δt. По окончании этого входного переключения пара каналов B-C проводит обнуление с последующим включением канала в противоположном направлении, в то время как пара каналов A-C остается в измерительном режиме, и т.д. во всех последующих циклах работы.
Более того, в соответствии с настоящим изобретением ошибки, связанные с изменением температуры при измерении температуры проточного трубопровода с помощью РТД и связанные именно с температурным дрейфом V/F-преобразователя, также успешно исключаются. А именно, для исключения этих ошибок два эталонных напряжения в добавление к напряжению РТД выборочно и последовательно преобразуются V/F-преобразователем в частотные величины в терминах счета и затем используются для определения линейного соотношения, точнее коэффициента пропорциональности, связывающего сосчитанную частотную величину с измеренной температурой проточного трубопровода. Затем с помощью простого умножения сосчитанной частотой величины напряжения РТД на этот коэффициент получается величина, соответствующая измеренной температуре проточного трубопровода. Поскольку эталонные напряжения при изменения температуры не изменяются заметно или совсем не изменяются, а каждое из них повторно преобразуется V/F-преобразователем со сравнительно короткой периодичностью порядка, пусть для примера, 0,8 с, то любой температурный дрейф V/F-преобразования для самих эталонных напряжений точно отражается в результирующих сосчитанных частотных величинах. Поскольку температурный дрейф в равной степени влияет на сосчитанные величины для обоих эталонных напряжений и напряжения РТД, но не изменяет их соотношений, то коэффициент пропорциональности при умножении на сосчитанную частотную величину для напряжения РТД дает истинную температурную величину, которая по существу не зависит ни от какого температурного дрейфа V/F-преобразователя. За счет исключения вызванных изменением температуры ошибок измеренной температуры коэффициент расходомера будет соответственно изменяться таким образом, чтобы точно отражать изменения температуры проточного трубопровода.
Более того, когда настоящий расходомер определяет текущую величину механического нуля (т. е. величину смещения расходомера при нулевом потоке), основанную на множестве измерений Δt при нулевом расходе, проведенных во время калибровки расходомера, то его отличительным признаком является использование этой величины в последующих компенсирующих измерениях реального расхода только в том случае, если шумовое содержимое этих измерений Δt при нулевом расходе достаточно мало, в противном случае эта величина игнорируется. Количество измерений Δt при нулевом расходе изменяется в любом из следующих трех случаев: (a) когда стандартная погрешность этих трех измерений падает ниже предела сходимости, (b) когда пользователь вручную прекращает процесс определения механического нуля, (c) если выбрано заранее заданное максимальное число этих измерений.
Сущность настоящего изобретения становится более понятным из следующего ниже подробного описания со ссылками на прилагаемые чертежи, из которых фиг. 1 представляет собой полную схему измерительной системы 5 кориолисова удельного массового расходомера; фиг. 2 представляет собой блок-схему верхнего уровня хорошо известной измерительной электроники 20, показанной на фиг. 1; фиг. 3 представляет собой план совмещения листов фиг. 3а и 3б; фиг. 3а и 3б вместе составляют блок-схему верхнего уровня соответствующей предпочтительному варианту осуществления настоящего изобретения схемы измерения расхода 30; фиг. 4 представляет собой план совмещения листов фиг. 4а и 4б, фиг. 4а и 4б вместе составляют временную диаграмму операций, выполняемых парами каналов A-C и B-C, в схеме измерения расхода 30, показанной на фиг. 3а и 3б; фиг. 5 является таблицей состояний схемы 70, входящей в состав схемы измерения расхода 30, показанной на фиг. 3а и 3б; фиг. 6 является упрощенной схемой процесса работы базового главного цикла 600 измерения расхода, осуществляемого микропроцессором 80, содержащимся в схеме измерения расхода 30, показанной на фиг. 3а и 3б; фиг. 7 представляет собой план совмещения листов фиг. 7а и 7б; фиг. 7а и 7б вместе составляют диаграмму процесса работы программы определения нуля 700, которая выполняется как часть главного цикла 600, показанного на фиг. 6а и 6б; фиг. 8 представляет собой план совмещения листов фиг. 8а и 8б; фиг. 8а и 8б вместе составляют диаграмму процесса работы программы определения механического нуля 800, которая выполняется как часть программы определения нуля 700, показанной на фиг. 7а и 7б; фиг. 9 схематично представляет операции обнуления, которые имеют место для каждого соответствующего диапазона стандартной погрешности, т.е. δΔt, измеренных величин Δt, получаемых во время процесса определения механического нуля; фиг. 10 схематично представляет диапазоны допустимых и недопустимых величин механического нуля; фиг. 11 является диаграммой процесса работы программы 1100 обработки РТД-температуры, которая выполняется периодически с учетом прерываний микропроцессором 80, который содержится в схеме измерения расхода 30, показанной на фиг. 3а и 3б.
Для упрощения понимания изложенного материала одинаковые элементы, являющиеся общими для разных чертежей, обозначены одинаковыми ссылочными номерами.
После изучения следующего ниже описания специалистам в данной области техники должно стать понятно, что настоящий способ может использоваться в широком разнообразии схемных решений, обеспечивающих измерение множества входов с помощью множества входных аналоговых каналов. Использование настоящего изобретения позволяет существенно, если не полностью, исключить ошибки, которые в противном случае могут иметь место из-за отличий в работе отдельных каналов и вызываемых, например, температурой, старением и/или другим каким-то явлением, которое по разному воздействует на используемые аналоговые схемы. Такое применение, конечно, может использовать любой кориолисов измеритель независимо от того, что он измеряет, поток расход, плотность или другие параметры рабочей текучей среды. Тем не менее, для краткости изложения будем рассматривать входную схему в контексте кориолисова измерителя с двумя трубопроводами (трубками), который измеряет удельный массовый расход и суммарный массовый расход.
На фиг. 1 показана полная кориолисова система 5 измерения расхода текучей среды. Система 5 состоит из двух основных компонентов: кориолисового измерительного узла 10 и измерительной электроники 20. Измерительный узел 10 измеряет удельный массовый расход рабочей текучей среды. Измерительная электроника 20, соединенная с измерительным узлом 10 проводами 100, создает информацию об удельном или общем массовом расходе. Информация о расходе выдается по проводам 26 в частотной или масштабированной импульсной форме. Кроме того, информация о расходе в провода 26 может также выдаваться в аналоговой форме в виде тока от 4 до 20 мА для простой подачи на расположенное ниже по ходу процесса управляющее и/или измерительное оборудование.
Кориолисов измерительный узел 10, как показано на чертеже, включает в себя пару патрубков 110 и 110', трубчатый элемент 150, пару параллельных проточных трубопроводов (трубок) 130 и 130", приводной механизм 180, пару обмоток измерения скорости 160L и 160R и пару постоянных магнитов 170L и 170R. Трубопроводы 130 и 130' имеют по существу U-образную форму, а их концы соединены с блоками крепления трубопроводов 120 и 120', которые, в свою очередь, крепятся к соответствующим патрубкам 110 и 110'. Оба проточных трубопровода не имеют чувствительных к давлению соединений.
Если боковые колена трубопроводов 130 и 130' жестко соединены с блоками крепления трубопроводов 120 и 120', а эти блоки, в свою очередь, жестко соединены с патрубками 110 и 110', как показано на фиг. 1, то создается непрерывный замкнутый путь протекания текучей среды через кориолисов измерительный узел 10. А именно, когда измеритель 10 соединен через впускной конец 101 и выпускной конец 101' с трубопроводной системой (не показана), пропускающей измеряемую рабочую текучую среду, то текучая среда втекает в измеритель через отверстие во впускном конце 101 патрубка 110 и пропускается по имеющемуся в нем каналу с сильно изменяющимся сечением в блок крепления трубопровода 120. Здесь текучая среда разделяется и проходит через проточные трубопроводы 130 и 130'. При выходе из проточных трубопроводов 130 и 130' рабочая среда вновь соединяется в один поток в блоке крепления трубопроводов 120' и проходит в патрубок 110'. В патрубке 110' среда протекает через канал с точно также изменяющимся сечением, что и в патрубке 110, как показано пунктирными линиями 105, к отверстию в выпускном конце 101'. Через конец 101' текучая среда возвращается в трубопроводную систему. Трубчатый элемент 150 не пропускает через себя никакой среды. Он служит для осевого выравнивания патрубков 110 и 110' и сохраняет промежуток между ними равным заранее заданной величине, так чтобы эти патрубки могли принимать в себя блоки крепления 120 и 120' с трубопроводами 130 и 130'.
U-образные проточные трубопроводы 130 и 130' выбираются и соответствующим образом крепятся к блокам крепления трубопроводов, так чтобы иметь по существу одинаковые моменты инерции и пружинные жесткости относительно осей изгиба W-W и W'-W' соответственно. Эти оси изгиба ориентированы перпендикулярно боковым коленам U-образных проточных трубопроводов и проходят вблизи соответствующих блоков крепления трубопроводов 120 и 120'. U-образные проточные трубопроводы выходят наружу из блоков крепления по существу параллельно и имеют по существу равные моменты инерции и равные пружинные жесткости относительно соответствующих осей изгиба. Поскольку пружинная жесткость трубопроводов изменяется с изменением температуры, то для непрерывного измерения температуры трубопровода на один из проточных трубопроводов, в данном случае на трубопровод 130', установлен резистивный температурный детектор (РТД) 190 (представляющий собой обычно платиновое РТД-устройство). В таком случае температура трубопровода и, следовательно, напряжение на РТД при данном, протекающем через него, токе будет управляться температурой текучей среды, проходящей по проточному трубопроводу. Зависящее от температуры напряжение на РТД используется известным способом электроникой 20 для соответствующей компенсации величины пружинной жесткости при любых изменениях температуры трубопровода. РТД соединен с измерительной электроникой 20 при помощи провода 195.
Оба проточных трубопровода приводятся в движение обычно синусоидально в противоположных направлениях относительно их соответствующих осей изгиба с их по существу одинаковой резонансной частотой. При этом оба проточных трубопровода будут одинаково вибрировать подобно зубцам настроечной вилки. Колебательные движущие силы трубопроводов 130 и 130' создаются приводным механизмом 180. Этот приводной механизм может состоять из любых хорошо известных конструкций, таких как, например, установленный на трубопровод 130 магнит и установленная напротив него на трубопровод 130 катушка, через которую пропускается переменный ток для создания синусоидальной вибрации обоих проточных трубопроводов с одинаковой частотой. Подходящий управляющий сигнал на приводной механизм 180 подается измерительной электроникой 20 через провод 185.
При протекании текучей среды через оба трубопровода, когда оба они приводятся в движение в противоположных направлениях, кориолисовы силы будут создаваться вдоль соседних боковых колен каждого из проточных трубопроводов 130 и 130', но в противоположных направлениях, то есть кориолисова сила, возникающая в боковой опоре 131, будет противоположна силе, возникающей в опоре 131'. Это явление происходит потому, что, хотя текучая среда и протекает через проточные трубопроводы в по существу одном и том же параллельном направлении, векторы угловой скорости колеблющихся (вибрирующих) проточных трубопроводов направлены противоположно друг друга, хотя и в по существу параллельных направлениях. Соответственно в результате действия кориолисовых сил в течение одного полуцикла колебания обоих проточных трубопроводов боковые опоры 131 и 131' будут изгибаться ближе друг к другу, чем на минимальное расстояние, которое создается между ними одним лишь только колебательным движением, создаваемым приводным механизмом 180.
Во время колебаний проточных трубопроводов соседние боковые опоры, которые сдвигаются ближе друг к другу, чем противоположные им боковые опоры, будут достигать конечной точки их перемещения, где их скорость пересекает нулевой уровень раньше, чем противоположных опор. Временной интервал (часто называемый здесь межканальной разностью фаз или временной разницей, а то и просто Δt), который длится, начиная с того момента, когда одна пара соседних опор достигает своей конечной точки перемещения, до того момента, когда противоположная пара боковых опор, то есть сдвигаемых друг от друга боковых опор, достигает своей соответствующей конечной точки перемещения, по существу пропорционален удельному массовому расходу текучей среды, протекающей через измерительный узел 10. Более подробное описание принципов работы кориолисовых расходомеров с параллельными путями протекания рабочей среды можно найти в патенте США 4491025 (выданному Дж.Е.Смиту 1 января 1985 г.).
Для измерения временного интервала Vt обмотки 160L и 160R прикреплены к каждому из трубопроводов 130 и 130' около их свободных концов, а постоянные магниты 170L и 170R также прикреплены около свободных концов другого трубопровода. Магниты 170L и 170R расположены так, чтобы обмотки 160L и 160R находились в пространстве, которое окружает соответствующие постоянные магниты и в котором поля магнитного потока по существу постоянны. При такой конструкции электрические сигнальные выходы, создаваемые обмотками 160L и 160R, обеспечивают профиль скорости полного перемещения трубопроводов и могут обрабатываться любым из множества известных способов с целью определения временного интервала и, в свою очередь, у удельного массового расхода текучей среды, проходящей через измеритель. В частности, обмотки 160L и 160R и соответствующие магниты 170L и 170R образуют соответственно левый и правый датчики. Несмотря на то, что, как кажется, Vt получается из временной разницы, на самом деле Vt получается из фазового измерения. С помощью измерения временной разницы здесь предлагается точный способ измерения проявления разности фаз, которая имеет место между сигналами левого и правого датчиков скорости.
Как уже говорилось, измерительная электроника принимает в качестве входа сигнал РТД, появляющийся в проводе 195, а также левый и правый сигналы скорости, возникающие в проводах 165L и 165R соответственно. Измерительная электроника 20, как уже говорилось, вырабатывает возникающий в проводе 185 сигнал привода. Провода 165L, 165R, 185 и 195 вместе обозначены как провода 100. Измерительная электроника обрабатывает левый и правый сигналы скорости, а также сигнал РТД с целью определения удельного массового расхода и общего массового расхода текучей среды, проходящей через измерительный узел 10. Этот удельный массовый расход создается измерительной электроникой 20 в проводах 26 в форме аналогового сигнала 4-20 мА. Информация об общем массовом расходе вырабатывается в частотной форме (обычно максимальном диапазоне от 0 до 10 кГц) в соответствующей линии с помощью проводов 26 для подключения к расположенному ниже по ходу процесса оборудованию.
Болк-схема измерительной электроники 20, соответствующей известному уровню техники, представлена на фиг. 2. Здесь измерительная электроника состоит из схемы измерения расхода 23, схемы привода проточной трубки 27 и индикатора 29.
Схема привода проточной трубки 27, показанная на фиг. 2, создает соответствующий повторяющийся переменный сигнал или импульсный сигнал привода по проводу 185 приводного механизма 180. Эта схема синхронизирует сигнал привода с левым сигналом скорости, который возникает в проводах 165L и 25. В процессе работы схема 27 поддерживает обе проточные трубки в противоположном синусоидальном вибрационном движении с основной резонансной частотой. Как известно, эта частота зависит от множества факторов, включая различные характеристики самих трубок и плотность протекающей по ним рабочей текучей среды. Поскольку схема 27 очень хорошо известна, то ее конкретное воплощение не составляет никакой части настоящего изобретения и далее не будет подробно рассматриваться. См., например, патенты США 5009109 (выдан П.Кэлоутею и др. 23 апреля 1991 г. ), 4934879 (выдан П.Ромэйноу 19 июня 1990 г.) и 4876879 (выдан Дж. Руесчу 31 октября 1989 г.), принадлежащие настоящему заявителю и описывающие различные варианты осуществления схемы привода проточной трубки.
Схема измерения расхода 23 обрабатывает левый и правый сигналы скорости, возникающие в проводах 165L и 165R соответственно, наряду с сигналом РТД, возникающим в проводе 195, известным способом с целью определения удельного массового расхода или общего массового расхода рабочей текучей среды, проходящей через измерительный узел 10. Результирующая информация об удельном массовом расходе создается в виде выходного сигнала 4-20 мА в проводе 263 для простого подключения к находящемуся ниже по ходу процесса управляющему оборудованию (не показано) и в виде масштабированного частотного сигнала провода 262 для простого подключения к дистанционному суммирующему устройству (не показано). Сигналы проводов 262 и 263 образуют часть сигналов процесса, которые вместе возникают в показанных на фиг. 1 проводах 26. Другие провода (конкретно не обозначенные) вместе с проводами 26 передают суммарную информацию о расходе, а также и другие параметры процесса в цифровой форме для подключения к подходящему индикатору, телеметрическому или находящемуся ниже по ходу процесса оборудованию.
Поскольку способ, с помощью которого схема измерения расхода 23 вырабатывает информацию об удельном массовом расходе и об общем расходе, хорошо известен специалистам в данной области техники, то мы рассмотрим только ту часть составляющей ее электроники, которая относится к настоящему изобретению. В этой связи измерительная схема 23 содержит два отдельных входных канала: левый канал 202 и правый канал 203. Каждый канал содержит интегратор и два нулевых детектора. В обоих каналах левый и правый сигналы скорости подаются на соответствующие интеграторы 206 и 216, каждый из которых образует фильтр нижних частот. Выходы этих интеграторов подаются на нулевые детекторы (или компараторы) 208 и 218, каждый из которых вырабатывает изменение уровня, когда соответствующий интегрированный сигнал скорости выходит за пределы окна напряжения, определенного небольшим заранее заданным положительным и отрицательным уровнем напряжения, то есть +/-V. Выходы обоих нулевых детекторов 208 и 218 подаются в качестве управляющих сигналов на счетчик 220 с целью измерения временного интервала в терминах счета тактовых импульсов, который проходит между соответствующими изменениями этих выходов. Этот интервал является хорошо известной величиной Δt и изменяется с изменением удельного массового расхода рабочей текучей среды. Результирующая величина Δt в виде счета подается параллельно в качестве входных данных на процессорную схему 235. Кроме того, РТД 190 соединен с входом схемы РТД-входа 224, которая поставляет постоянный ток управления на РТД, лианеризует напряжение, появляющееся на РТД, и преобразует его с помощью преобразователя напряжения в частоту (V/F-преобразователя) 226 в поток импульсов с масштабированной частотой, которая изменяется пропорционально любым изменениям напряжения РТД. Результирующий поток импульсов, создаваемый схемой 224, подается в качестве входа на счетчик 228, который периодически считает этот поток и вырабатывает величину в виде счета, пропорциональную измеренной температуре. Содержимое счетчика 228 подается также параллельно в качестве входных данных на процессорную схему 235. Процессорная схема, которая обычно представляет собой микропроцессорную систему, определяет удельный массовый расход из оцифрованной величины Δt и поданных на нее температурных величин. При этом оцифрованная температурная величина используется для изменения величины коэффициента измерителя, основанного на текущей температуре проточных трубок, и за счет этого учитывает изменения упругости проточных трубопроводов с температурой. Затем измененный коэффициент измерителя (т.е. температурно компенсированный коэффициент измерителя РГ) последовательно используется для пропорционального определения удельного массового расхода из текущей измеренной величины Δt. Определив удельный массовый расход, схема 235 затем обновляет общий массовый расход и также создает, например, подходящие выходные сигналы удельного массового расхода в проводах 26 для соединения с местным индикатором 29 и/или расположенным ниже по ходу процесса управляющим оборудованием.
Как теперь стало ясно, аналоговая схема, содержащаяся в левом и правом каналах, к сожалению, вносит некоторую погрешность в результирующие величины массового расхода и удельного массового расхода, создаваемые процессорной схемой 235. А именно, каждый входной канал часто имеет не только разную величину внутренней фазовой задержки относительно другого, если измерять от входа интегратора до выхода его нулевых детекторов, но также и фазовую задержку, которая создается внутри каждого канала и часто по разному изменяется от одного канала к другому при соответствующих изменениях температуры. Раз так, то левый канал 202 может, например, создавать фазовую задержку с другим температурным изменением, чем фазовая задержка канала 212. Эта изменчивость приводит к температурной межканальной разности фаз, которая проявляется в виде ошибочной составляющей в измеренной величине Δt. Поскольку величина Δt., которая сама получается из реального потока через измеритель, сравнительно мала, то эта ошибочная составляющая может при некоторых обстоятельствах оказаться значительной. Эта ошибка обычно не учитывается в имеющихся в настоящее время кориолисовых удельных массовых расходомерах. В некоторых обстоятельствах, а именно когда измеритель находится на открытом воздухе и подвергается значительным температурным флуктуациям, эта ошибка может привести к заметной температурной ошибке измерений удельного массового расхода и исказить их.
Еще, независимо от вызванных температурой ошибок измеренной величины Δt, сама схема измерения температуры создает дополнительный источник температурной ошибки в величинах расхода и скорости потока, создаваемый процессорной схемой 235. При этом V-F-преобразователь 226, содержащийся во входной РТД-схеме 224, обладает, как почти все преобразователи, температурным дрейфом. Этот дрейф, основанный на величине изменения окружающей температуры, может привести к ошибке измерения температуры проточного трубопровода, достигающей нескольких градусов. Эта ошибка, в свою очередь, будет также искажать величины удельного массового расхода и общего массового расхода.
Для исключения недостатков кориолисовых измерителей известного уровня техники и, в частности, тех, которые содержат схемы, представленные схемой измерения расхода 23, настоящим изобретением предлагается способ для использования в схеме измерения расхода кориолисова измерителя, которая успешно представляет величины массового расхода и удельного массового расхода, полученные измерителем по существу независимо от температурных изменений, улучшая тем самым их общую точность.
А именно, в соответствии с настоящим изобретением два идентичных входных канала (т. е. левый и правый), какие часто используются в схемах измерения расхода известного уровня техники, заменены двумя парами входных каналов (т. е. парами A-C и B-C), которые позволяют измерять текущую внутреннюю фазовую задержку, вносимую каждой парой каналов. Если для каждой пары каналов известна величина внутренней фазовой задержки, то ее можно использовать для корректировки вызванных потоком величин Δt, измеренных впоследствии этой парой каналов. Поскольку каждая пара каналов приводится в действие циклически со сравнительно коротким периодом между измерением своей собственной внутренней фазовой задержки, то есть режимом "обнуления", и измерением величин Δt для условий реального расхода, то есть "измерительным" режимом, то текущая величина фазовой задержки точно отражает любые вызванные температурой изменения, происходящие в работе каждой пары каналов. Поскольку основанные на расходе измерения Δt, обеспечиваемые каждой парой каналов, корректируются для текущей внутренней фазовой задержки, соответствующей каждой конкретной паре, то эти величины Δt не содержат никаких температурных ошибок независимо от температуры окружающей расходомер среды и ее изменений. Раз так, то кориолисов расходомер, соответствующий настоящему изобретению, может с успехом использоваться в средах с сильно изменяющейся температурой без сколько-нибудь заметного ухудшения точности за счет температурных изменений.
В частности, соответствующая настоящему изобретению схема измерения расхода использует три отдельных аналогичных входных канала (т.е. каналы A, B и C), с помощью которых последовательно и поочередно для каждой из двух пар, то есть пар A-C и B-C из трех каналов, проводятся измерения межканальной разности фаз. Пара A-C содержит каналы A и C, а пара B-C содержит каналы B и C. Канал C служит в качестве эталонного канала, в который в качестве входного сигнала постоянно подается один из двух сигналов датчиков скорости и специально для целей предпочтительного варианта осуществления настоящего изобретения подается сигнал левого датчика скорости. Входом каналов A и B является сигнал либо левого, либо правого датчика скорости. В то время как и нулевой, так и измерительный режимы включают в себя измерение межканальной разности фаз в паре каналов, принципиальным отличием между режимами является то, что в нулевом режиме в оба канала пары подается один и тот же, то есть левый, сигнал датчика скорости, так что измерение результирующей межканальной разности фаз дает измерение внутренней фазовой задержки этой пары; в то время как в измерительном режиме левый и правый сигналы скорости подаются в разные соответствующие каналы этой пары, чтобы обеспечить измерение, хоть и не корректированное, текущей основанной на расходе величины для последующего использования в определении текущих величин массового расхода и скорости потока. Хотя измерения межканальной разности фаз (Δt) проводятся в обоих режимах, во избежание недоразумений следует понимать разницу между этими величинами в смысле причин их появления. Теперь рассмотрим те фазовые измерения, которые происходят в нулевом режиме и являются измерениями межканальной разности фаз, и те, которые происходят в нулевом режиме и являются измерениями величин Δt. Кроме того, как измерения и межканальной разности фаз, так и измерения величин Δt, для любой пары каналов будут далее вместе называться временными измерениями.
А именно, для любой пары каналов, работающих в нулевом режиме, такой как пара A-C, одинаковый, то есть левый, сигнал датчика скорости подается на входы обоих каналов пары. Затем во время так называемого интервала "обнуления" с усреднением за время этого интервала последовательно и повторно проводятся изменения межканальной разности фаз. Идеально, если оба канала этой пары дают одну и ту же внутреннюю фазовую задержку, т.е. если фазовая задержка в канале A равна фазовой задержке в канале C, тогда все измерения межканальной разности фаз будут равны нулю. Однако на самом деле в любой момент времени все три канала имеют различные внутренние фазовые задержки. Тем не менее, поскольку фазовая задержка для каждой пары измерена относительно одного опорного канала, т.е. канала C, то любые отличия в фазовой задержке между двумя парами каналов вызваны отличиями во внутренней фазовой задержке между каналами A и B. По окончании интервала "обнуления" вход не эталонного канала этой пары переключается на другой сигнал датчика скорости, т. е. на правый сигнал датчика скорости. Затем проходит конечный, т. е. включающий в себя так называемый интервал "переключения", период времени прежде, чем эта пара каналов начнет работать в "измерительном" режиме, во время которого измеряются обусловленные потоком величины Δt. Интервал переключения достаточно длителен, чтобы позволить закончиться всем связанным с переключением переходным процессам, например, чтобы их амплитуда упала ниже заранее заданного уровня.
В то время как одна пара каналов, например A-C, работает в нулевом режиме, другая пара, например B-C, работает в измерительном режиме. Для любой пары каналов каждая последующая текущая обусловленная потоком величина Δt, полученная по время измерительного режима, компенсирована обычно за счет вычитания наиболее свежей величины внутренней фазовой задержки, которая была измерена для этой пары каналов во время предыдущего нулевого режима.
Время, в течение которого одна пара каналов работает в измерительном режиме, т.е. измерительный интервал, равно всему тому времени, в течение которого другая пара работает в нулевом режиме. Это последнее время (т.е. "нулевой" интервал) включает в себя время (т.е. интервал "переключения"), в течение которого последний канал переключает свой не эталонный вход с правого на левый сигнал датчика скорости, затем проводит обнуление (во время так называемого интервала "обнуления") и, наконец, переключает свой не эталонный вход обратно с левого на правый сигнал датчика скорости. Обратите внимание на то, что нулевой интервал включает в себя как два интервала переключения, так и интервал обнуления.
По окончании измерительного интервала пары каналов просто переключают режимы, так что взятая для примера пара каналов B-C сначала переключает свой вход не эталонного канала с правого на левый сигнал датчика скорости, а пара каналов A-C начинает измерения Δt. По окончании этого входного переключения пара каналов B-C проводит обнуление с последующим включением канала в противоположном направлении, в то время как пара каналов A-C остается в измерительном режиме, и т.д. во всех последующих циклах работы. После того, как пара каналов закончит последнюю операцию переключения, но до начала ее работы в измерительном режиме, она может, если необходимо, провести измерения вызванных расходом величин Δt в течение конечного периода времени, называемого здесь "активным" интервалом, который для простоты дела имеет длительность, равную длительности интервала "обнуления". Поскольку оба канала могут одновременно вырабатывать вызванные расходом величины Δt во время "активного" интервала из обоих сигналов датчиков скорости, то в идеальном случае отсутствия какого бы то ни было шума или отдельных отличий между внутренними фазовыми задержками, связанными с парой каналов, обоими каналами должны создаваться одинаковые величины Δt. Следовательно, в качестве дополнительной проверки одна или более из измеренных вызванных расходом величин Δt, полученных из каждой пары каналов за время "активного" интервала, могут быть компенсированы наиболее свежей величиной измеренной фазовой задержки для данной пары с тем, чтобы дать соответствующие пары скорректированных величин Δt. Две величины в каждой такой паре можно потом сравнить друг с другом. Значительное расхождение этих величин в любой из таких пар будет в общем означать наличие ошибки.
Поскольку переключение каналов происходит только для пары каналов, противоположной той, которая используется для проведения зависящих от расхода измерений, то любые переходные процессы переключения (и связанный с ними шум) эффективно изолированы и совершенно не искажают измерения расхода и удельного расхода. Более того, за счет выбора достаточно длительного интервала переключения, оканчивающегося прежде, чем начнется обнуление, переходные процессы переключения не влияют на измерения внутренней фазовой задержки для обнуляемой пары каналов. Раз так, то работа соответствующего настоящему изобретению кориолисова измерителя по существу, если не полностью, не зависит от переходных процессов переключения входов и т.п.
Конкретная длительность интервалов переключения и обнуления не критична. Однако, поскольку переходные процессы переключения угасают довольно быстро и дополнительное усреднение обычно обеспечивает повышенную точность измерений внутренней фазовой задержки, то интервал переключения обычно выбирается гораздо меньшим, чем интервал обнуления. Поэтому интервал переключения, будучи измерен в циклах колебания трубки, может длиться в течение, например, 16 - 32 таких циклов, в то время как интервал обнуления может быть установлен равным более чем, например, 2048 циклов.
Более того, в соответствии с настоящим изобретением ошибки, связанные с измерением температуры при измерении температуры проточного трубопровода с помощью РТД и связанные именно с температурным дрейфом V/F-преобразователя, также успешно исключаются. А именно, для исключения этих ошибок два эталонных напряжения в добавление к напряжению РТД выборочно и последовательно преобразуются V/F-преобразователем в частотные величины в терминах счета и затем используются для определения линейного соотношения, точнее коэффициента пропорциональности, связывающего сосчитанную частотную величину с измеренной температурой проточного трубопровода. Затем с помощью простого умножения сосчитанной частотной величины напряжения РТД на этот коэффициент получается величина, соответствующая измеренной температуре проточного трубопровода. Поскольку эталонные напряжения при изменении температуры не изменяются заметно или совсем не изменяются, а каждое из них повторно преобразуется V/E-преобразователем со сравнительно короткой периодичностью порядка, пусть для примера, 0,8 с, то любой температурный дрейф V/F-преобразования для самих эталонных напряжений точно отражается в результирующих сосчитанных частотных величинах. Поскольку температурный дрейф в равной степени влияет на сосчитанные величины для обоих эталонных напряжений и напряжений РТД, но не изменяет их соотношений, то коэффициент пропорциональности при умножении на сосчитанную частотную величину для напряжения РТД дает истинную температурную величину, которая по существу не зависит ни от какого температурного дрейфа V/F-преобразователя. За счет исключения вызванных изменением температуры ошибок измеренной температуры коэффициент расходомера будет соответственно изменяться таким образом, чтобы точно отражать изменения температуры проточного трубопровода.
А. Описание аппаратного обеспечения. С учетом приведенного выше описания рассмотрим работу блок-схемы верхнего уровня соответствующей предпочтительному варианту осуществления настоящего изобретения схемы измерения расхода 30, представленной на фиг. 3а и 3б, совмещение листов которых показано на фиг. 3.
Схема измерения расхода 30 содержит входной мультиплексор, три аналогичных входных канала, один из которых является эталонным каналом C, конечный автомат с соответствующими счетчиками времени и микрокомпьютерную систему. Входы двух не эталонных каналов A и B выбираются с помощью мультиплексора конечным автоматом при его циклическом переходе через различные состояния. Выходы трех каналов подаются на счетчики с целью проведения временных измерений, то есть измерений межканальной разности фаз и величины Δt, для каждой из пар каналов A-B и B-C. Временные изменения, проводимые этими счетчиками, вместе с информацией о состоянии от конечного автомата поступают на микрокомпьютер, который, в свою очередь, определяет соответствующие текущие величины удельного массового расхода. Кроме того, выход РТД и два эталонных напряжения последовательно преобразуются в соответствующие частотные величины с помощью соответствующего входного переключателя V/F-преобразователя и соответствующей схемы и подсчитываются с помощью счетчика времени, связанного с конечным автоматом. Полученные величины счета подаются затем этим счетчиком в микрокомпьютер для правильного изменения измерительного коэффициента.
И в самом деле, как показано на чертеже, схема измерения расхода 30 содержит три похожих канала 44, 54 и 64, которые называются также каналами A, B и C. Кроме того, эта схема измерения расхода содержит также мультиплексор 31, схему 70, аналоговый переключатель 35, генератор эталонных напряжений 39, схему РТД-входа 42, микрокомпьютер 80, выходную схему 90 и входную схему 95.
Схема РТД-входа 42, представленная на фиг. 3а и 3б, выполняет те же самые функции и содержит по существу те же самые схемы, что и схема РТД-входа 224, показанная на фиг. 2а и 2б и рассмотренная выше.
Каждый из каналов A и B, пусть для примера канал A, содержит входную аналоговую схему, которая просто представлена усилителем, соединенным с детектором уровня. Соответствующий каналу A усилитель 46 обеспечивает необходимую входную фильтрацию левого датчика скорости, смещение уровня и усиление полученного смещенного сигнала. Детекторы уровня 48, представляющие собой оконный компаратор, обеспечивают изменение уровня выходного сигнала всякий раз, когда выходной сигнал усилителя 46 превышает или оказывается ниже небольших фиксированных положительного и отрицательного напряжений. За счет этого каждый из этих каналов выполняет по существу одинаковые функции, что и соответствующая схема в схеме измерения расхода 23, фиг. 2. Канал C, показанный на фиг. 3а и 3б содержит схему, представленную усилителем 56 и детектором уровня 58. Эталонный канал C довольно похож на каналы A и B, за исключением того, что детектор уровня 58 содержит один детектор уровня, а не оконный компаратор, для определения превышения выходным сигналом усилителя 56 небольшого положительного уровня напряжения. Мультиплексор 31, который для примера образован из трех отдельных мультиплексоров с двумя входами и одним выходом, выборочно пропускает либо левый сигнал датчика скорости провода 165L, либо правый сигнал датчика скорости провода 165R. Поэтому левый и правый сигналы датчиков скорости поданы соответственно на первые (A0, B0 и C0) и вторые (A1, B1 и C1) входы мультиплексора 31. Состояние сигналов выбора S0, S1 и S2 определяют, правый или левый сигнал датчика скорости пропускать на три отдельных выхода мультиплексора (OA, OB и OC). Выбор сигналов 33, образованный сигналами PPO-A и PPO-B, соединенных для выбора входов S0 и S1, заставляет мультиплексор пропускать отдельно или левый, или правый сигналы датчиков скорости, являющихся входами каналов A и B соответственно, в то время как заземленный сигнал выбора S2 заставляет мультиплексор 31 постоянно пропускать левый сигнал датчика скорости с провода 165L на вход эталонного канала C. Выбор сигналов 33 устанавливается управляющей логикой 72 схемы 70 для осуществления соответствующего переключения входов.
Схема 70 содержит управляющую логику 72, счетчики времени 74, 76 и 78. Схема 70, предпочтительно образованная одной специальной интегральной схемой, является по существу конечным автоматом, который определяет периодическую и повторяющуюся последовательность временных интервалов и соответствующих состояний. Во время каждого временного интервала прикладываемые извне входные сигналы могут запускать и останавливать соответствующий временной счетчик. По окончании такого интервала содержимое этого временного счетчика может считываться в параллельной форме для последующего использования. Применительно к схеме измерения расхода 30 временные счетчики 74 и 76, сгруппированные в счетчики 75, используются для определения временных измерений для пар каналов A-B и B-C соответственно. Временной счетчик 78 используется для счета частотной величины, создаваемой схемой РТД-входа 42 для аналогового входного сигнала, подаваемого на нее через переключатель 35. Этот счетчик образовывается управляющей логикой 72 перед каждым интервалом преобразования за счет подачи соответствующего сигнала по проводу 79. Управляющая логика 72 образована из хорошо известной комбинаторной или какой-то другой логики. После инициализации в циклах трубопроводов длительности интервалов обнуления и переключения управляющая логика создает сигналы выбора в проводах 34 для приведения в действие мультиплексора 31 с целью выбора и пропускания сигналов наружных датчиков на входы каждого из каналов A и B, так что пары каналов повторно и противоположно циклически работают в нулевом и измерительном режимах. Кроме того, управляющая логика 72 также вырабатывает соответствующие управляющие сигналы, которые, будучи поданы по проводам 77 и 79, надлежащим образом сбрасывают счетчики 76 и 74 для каждого временного интервала. Кроме того, управляющая логика вырабатывает в проводах 34 соответствующие сигналы выбора для управляющего входа (C) аналогового переключателя 35. Эти сигналы выбора заставляют переключатель пропускать одно конкретное из его входных напряжений, а именно напряжение РТД, появляющееся в проводе 195, или одно из двух эталонных напряжений (  или
или  , которые для примера взяты равными соответственно 1,9 и 0,8) на схему РТД-входа 42 для последующего преобразования находящимся в ней V/F-преобразователем. Эталонное напряжение
, которые для примера взяты равными соответственно 1,9 и 0,8) на схему РТД-входа 42 для последующего преобразования находящимся в ней V/F-преобразователем. Эталонное напряжение  подается по проводу 38 с генератора эталонных напряжений 39, который сам содержит хорошо известный высокостабильный источник напряжения, который обладает малым дрейфом при изменениях температуры. Как будет рассмотрено ниже, а точнее со ссылками на программу 1100 обработки температуры РТД (рассмотрена совместно с фиг. 11), V/F-преобразователь приводится в действие с целью проведения преобразования через каждые 0,1 с каждого из аналоговых напряжений (из которых конкретно показаны и рассмотрены только те три, которые относятся к настоящему изобретению), поданных на входы (I0, I1 и I2 для трех показанных напряжений) аналогового переключателя 35, выбираемые по времени через каждые 0,8 с для преобразования в соответствующую частотную величину. Управляющая логика 72 определяет, какое именно из входных напряжений аналогового переключателя 35 нужно выбирать в данный момент времени. Состояния схемы 70 рассмотрены более подробно ниже в связи с таблицей состояний 400 и временной диаграммой 500, показанными соответственно на фиг. 4 и 5.
подается по проводу 38 с генератора эталонных напряжений 39, который сам содержит хорошо известный высокостабильный источник напряжения, который обладает малым дрейфом при изменениях температуры. Как будет рассмотрено ниже, а точнее со ссылками на программу 1100 обработки температуры РТД (рассмотрена совместно с фиг. 11), V/F-преобразователь приводится в действие с целью проведения преобразования через каждые 0,1 с каждого из аналоговых напряжений (из которых конкретно показаны и рассмотрены только те три, которые относятся к настоящему изобретению), поданных на входы (I0, I1 и I2 для трех показанных напряжений) аналогового переключателя 35, выбираемые по времени через каждые 0,8 с для преобразования в соответствующую частотную величину. Управляющая логика 72 определяет, какое именно из входных напряжений аналогового переключателя 35 нужно выбирать в данный момент времени. Состояния схемы 70 рассмотрены более подробно ниже в связи с таблицей состояний 400 и временной диаграммой 500, показанными соответственно на фиг. 4 и 5.
По мере того, как схема 70 циклически проходит через свои различные состояния, которых всего восемь, она записывает величину текущего состояния во внутренний регистр (не показан), который по запросу от микрокомпьютера 80 выдает ее на провода 85. Затем микрокомпьютер считывает эту величину, которая, в свою очередь, позволяет ему правильно обрабатывать сосчитанные величины, поставляемые счетчиками 75 и 78 через соответствующие внутренние регистры (не показаны) и провода 87 и 88. Провода 87 поставляют исходные временные измерения, обозначенные RAW RATE A и RAW RATE B, в микрокомпьютер 80 для пар каналов A-C и B-C соответственно. В зависимости от режима, в котором работает каждая пара каналов, каждое из измерений RAW RATE A и RAW RATE В дает в терминах счета отдельное изменение межканальной разности фаз или отдельную величину Δt/ для каждой пары каналов. Провода 88 подают в микрокомпьютер данные сосчитанных частотных измерений для РТД и эталонных напряжений. Кроме того, логика 72 также записывает величину в другой внутренний регистр (конкретно не показан), которая указывает, какое аналоговое напряжение должно быть выбрано аналоговым переключателем 35 для преобразования схемой РТД-входа 42. Эта величина также считывается по проводам 85 микрокомпьютером 80.
Далее, микрокомпьютер подает необходимые сигналы в провода 84 для управления всей работой схемы 70. Микрокомпьютер вырабатывает также соответствующие адресные сигналы в проводах 82 для назначения управляющей логике 72 конкретного внутреннего регистра, с которого микрокомпьютер будет считывать или в который микрокомпьютер будет записывать данные.
Микрокомпьютер также соединен проводами 91 и 93 соответственно с хорошо известной выходной схемой 90, которая обеспечивает множество стандартных выходов (таких как, например, интерфейс(ы) индикатора, порты связи, провод 263 для выхода 4 - 20 мА и провод 262 масштабированного частотного выхода) в проводах 26, и с хорошо известной входной схемой 95, которая обеспечивает расходомер интерфейсами для множества хорошо известных входных устройств (таких как переключатели, наборные поля пользователя, порты связи и т.п.).
Микрокомпьютер 80 использует один из множества хорошо известных доступных микропроцессоров (конкретно не обозначен) наряду с достаточным по объему оперативным запоминающим устройством (ОЗУ) 83 для хранения данных и достаточным по объему постоянным запоминающим устройством (ПЗУ) 86 для хранения программ и рабочих констант. Поскольку программа имеет управляемую по прерываниям архитектуру выполнения задачи, то для упрощения передачи и совместного использования различными задачами измеренных и расчетных данных микрокомпьютер имеет базу данных. На основании входной информации, а именно на основании временных измерений, содержащих измерения межканальной разности фаз и величины Δt для каждой пары каналов, и расчетных частотных данных с информацией о состоянии, которая поставляется схемой 70, микрокомпьютер 80 соответственно корректирует измеренные величины Δt для каждой пары каналов с учетом измеренной внутренней фазовой задержки, определяет точный температурно компенсированный измерительный коэффициент, а затем, используя скорректированные величины Δt и этот коэффициент, определяет величины текущего массового расхода и удельного массового расхода, что подробно рассмотрено ниже в связи с базовым главным циклом 600 измерения расхода, показанным на фиг. 6а и 6б, программой 700 определения нуля, показанной на фиг. 7а и 7б, программой 800 определения механического нуля, показанной на фиг. 8а и 8б и программой 1100 обработки температуры РТД, показанной на фиг. 11.
Чтобы лучше понять взаимодействие между схемой 70 и микрокомпьютером 80, рассмотрим временную диаграмму 400 и таблицу состояний 500, показанные на фиг. 4а, 4б и 5, которые совместно подробно раскрывают функции схемы 70 и временную связь. Для простоты понимания по ходу дальнейшего описания читателю следует одновременно смотреть на фиг. 4а, 4б и 5.
Временная диаграмма 400, показанная на фиг. 4а и 4б определяет нормальные последовательные режимные операции для каждой пары каналов и временные соотношения между ними.
Как уже говорилось выше, каждая из пар каналов, A-C и B-C, работает либо в измерительном, либо в нулевом режиме. Когда одна пара каналов работает в измерительном режиме, другая пара каналов работает в нулевом режиме, причем по окончании этих режимов операции меняются местами. Длительность каждого из этих режимов ("режимного" интервала) всегда равна одному и т ому же времени t. Поэтому нулевой режим 410 для пары каналов A-С и измерительный режим для пары каналов B-C работают одновременно, также как измерительный режим 440 и нулевой режим 450, нулевой режим 479 и измерительный режим 480 для пар каналов A-С и B-C соответственно. Стрелки 430, 470 и 490 означают смену режимов между парами каналов по истечении трех последовательных режимных интервалов.
Левый (L) сигнал датчика скорости постоянно подается в канал C, служащий эталонным каналом, относительно которого постоянно измеряется внутренняя фазовая задержка каждого из двух других каналов. Между тем, входные сигналы, подаваемые в не эталонные каналы A и B, переключаются в зависимости от режима соответствующей пары каналов A-С и B-C между левым и правым (R) сигналами датчика скорости, причем измерения разности фаз проводятся для каждой другой входной конфигурации с целью получения измерений межканальной разности фаз или величин Δt для каждой пары.
В частности, пока пара каналов работает в измерительном режиме, в не эталонный канал этой пары, например в канал A пары A-C, подается правый сигнал датчика скорости, и проводятся измерения межканальной разности фаз для этой пары. Эти измерения дают исходные, вызванные расходом, величины Δt. Эти измерения проводятся в течение всего времени t пребывания канала в измерительном режиме. В течение этого времени эти измерения подаются в микрокомпьютер для последующей переработки в соответствующие величины удельного массового расхода.
Для любой пары каналов, например для пары B-C, во время нулевого режима в следующей последовательности выполняются четыре отдельные функции: (a) переключение входа не эталонного канала этой пары с правого на левый сигнал датчика скорости во время интервала переключения, (b) проведения измерений внутренней фазовой задержки для этой пары каналов (т.е. "обнуления" во время нулевого интервала), (c) переключение входа не эталонного канала обратно на первый сигнал датчика скорости также во время интервала переключения и (d) разрешение этой паре быть "активной " в течение нулевого интервала, во время которого могут проводиться измерения вызванных расходом величин Δt. Поскольку другая пара каналов, например пара A-C, будет активно измерять вызванные расходом величины Δt во время ее измерительного интервала, в то время как пара каналов B-C активна, то оба канала оказываются способными одновременно обеспечивать вызванные расходом величины Δt для одних и тех же сигналов датчика скорости во время этого "активного" интервала. Если нужна дополнительная проверка ошибок, микрокомпьютер может обрабатывать измерения "активной" пары каналов и сравнивать результирующие скорректированные величины Δt с этими же величинами, но полученными для другой пары каналов. Значительное расхождение между ними обычно означает наличие ошибки.
Как показано в качестве примера на фиг. 4а и 4б, каждый интервал переключения равен по длительности 16 циклам трубопроводов, в то же время как каждый интервал обнуления происходит через каждые 2048 последовательных циклов трубопроводов. Соответственно время t, складывающееся из двух разделенных интервалов переключения и обнуления, длится 4128 циклов трубопроводов. Во время инициализации расходомера микрокомпьютер 80, показанный на фиг. 3а и 3б, загружает длительности, в терминах циклов трубопроводов, интервалов переключения и обнуления в схему 70, а именно в находящуюся в ней логику управления 72.
Как показано в таблице состояний фиг. 5 для схемы 70, эта схема при нормальной работе постоянно циклически проходит через восемь последовательных состояний, обозначенных для примера как состояния 26, 46, 26, 66, 6A, 6C, 6A и 6E, из которых два состояния, т.е. состояния 26 и 6A, повторяются.
Каждое из этих состояний существует в течение фиксированной длительности как в интервале переключения, так и в интервале обнуления. Во время всех восьми состояний левый сигнал датчика скорости постоянно подается на вход эталонного канала C.
Для первых четырех состояний (состояний 26, 46, 26 и 66) пара каналов A-C работает в измерительном режиме (называемом далее режимом измерения канала A), в то время как пара каналов B-C, наоборот, работает в нулевом режиме (называемом далее нулевым режимом канала B). В режиме измерения канала A схема 70 создает низкий уровень выбирающего сигнала мультиплексора PPO-A, так что правый сигнал датчика скорости постоянно подается на вход канала A. Во время этого режима, как показано буквой X, пара каналов A-C создает зависящие от расхода величины Δt и, следовательно, служит измерительной парой каналов. Кроме того, в начале состояния 26 схема 70 вызывает начало нулевого режима канала B первоначальной установкой высокого уровня выбирающего сигнала мультиплексора PPO-B, чтобы сначала переключить вход канала B с правого на левый сигнал датчика скорости. Этим начинается состояние 26 переключения канала B, во время которого пара каналов B-C не проводит измерений, а просто выжидает соответствующий период времени, т.е. интервал переключения tSW, с целью установления всех переходных процессов и тому подобных возмущений в канале B. Как только это состояние закончится, схема 70 включает состояние 46 обнуления пары каналов B-C. Во время состояния 46, которое длится в течение интервала обнуления tzero, схемой 70 для пары каналов B-C постоянно проводятся измерения межканальной разности фаз. Эти измерения считываются и усредняются микропроцессором для получения измерений в величинах счета внутренней фазовой задержки для этой пары каналов. По окончании интервала обнуления повторно устанавливается состояние 26 переключения канала B для переключения входа канала B с левого сигнала датчика скорости на правый сигнал датчика скорости. Для этого схема 70 создает низкий уровень выбирающего сигнала RPO-B мультиплексора. Это состояние, в котором на паре каналов B-C никакие измерения не проводятся, снова длится в течение интервала переключения, чтобы позволить установиться всем переходным процессам переключения и тому подобным возмущениям. По окончании состояния 26 наступает состояние 66 активности обоих каналов, которое длится в течение интервала обнуления, во время которого оба канала "активны", и при необходимости могут проводиться измерения вызванных расходом величин Δt в паре каналов B-C в добавление к тем измерениям, которые одновременно проходят в паре каналов A-C. По окончании состояния 66 последовательно проходят состояния 6A, 6C, 6A и 6E, которые обеспечивают проведение проведение таких же операций, но на другой паре каналов. Затем все состояния последовательно повторяются, и т.д.
B. Описание программного обеспечения. Не забывая приведенного выше описания, рассмотрим различные отличительные признаки программ, выполняемых микропроцессором 80, показанным на фиг. 3а и 3б. Поскольку микропроцессор выполняет множество хорошо известных административных и управляющих функций, не относящихся к настоящему изобретению, таких как обеспечение управления базой данных, создание необходимой операционной среды для выполнения прикладной программы решения конкретной задачи, то для упрощения следующего описания все эти функции и необходимое для них программное обеспечение будут опущены.
Фиг. 6 представляет собой упрощенную диаграмму процесса работы базового главного цикла измерения расхода 600. Эта программа обеспечивает основные функции измерения расхода.
После входа в программу 600 ее выполнение продолжается блоком 610, который считывает текущие исходные данные измерения разности фаз (RAW RATE A и RAW RATE B) и информацию о состоянии из схемы 70. В зависимости от текущего режима каждой пары каналов каждый из наборов данных RAW RATE A и RAW RATE B обеспечивает в величинах счета измерение либо отдельной межканальной разности фаз, либо отдельной величины Δt. После выполнения блока 610 выполняется блок 620. Этот блок выполняет программу 700 определения нуля, которая в ответ на измерения исходной разности фаз и информацию о состоянии, как подробно будет рассмотрено ниже, обрабатывает данные разности фаз для пары каналов, которая в данный момент работает в измерительном режиме, в качестве зависящей от расхода величины Δt и обрабатывает данные разности фаз для другой пары каналов в качестве измерения межканальной разности фаз. Это измерение используется этой программой для определения величины электронного нуля для этой последней пары каналов.
Электронный ноль состоит из двух величин, а именно из внутренних фазовых задержек, выраженных в тех же величинах счета, что и Δt, для каждой из двух пар каналов. После этого программа 700 определяет механический ноль кориолисова расходомера. Механический ноль есть величина смещения в измерениях, которые получены, как будет описано ниже, во время условия нулевого расхода, имеющего место при калибровке расходомера. После окончания этих операций программа 700 корректирует текущую величину Δt, измеренную для пары каналов, работающей в измерительном режиме, с помощью механического нуля для расходомера и с помощью самой последней величины электронного нуля для этой пары, эта величина электронного нуля является определенной ранее, когда эта пара последний раз работала в нулевом режиме.
После полного выполнения программы 700 проводится выполнение блоков 620-630. Последний блок фильтрует скорректированную величину Δt, созданную блоком 620, через двухполюсный программный фильтр для удаления шума и т.п., создавая тем самым фильтрованную величину Δt. Далее проводится выполнение блока 640, который рассчитывает текущий объемный и массовый удельные расходы, используя фильтрованную величину Δt и температурно скорректированный нормирующий коэффициент. Этот температурный коэффициент периодически обновляется программой 1100 обработки температуры РТД, которая, как подробно описано ниже, выполняется с управлением по прерываниям.
После выполнения блока 640 выполняется блок 650. Он сравнивает величины объемного и массового удельных расходов с соответствующими условиями предельно малого расхода (прекращения впуска), если эти условия выполняются, он временно устанавливает объемный и массовый удельные расходы на ноль. После этого выполняется блок 660, который сохраняет текущие величины объемного и массового удельных расходов в базе данных для последующего использования, такого как периодическое обновление показаний индикаторов, отсчетов суммарного расхода и/или выходов расходомера. Затем происходит циклический возврат к программе 610 и т.д.
Фиг. 7а и 7б вместе составляют диаграмму процесса работы программы определения нуля 700. Совмещение листов этих чертежей показано на фиг. 7. Эта программа состоит из четырех отдельных частей, программы 710 определения электронного нуля, программы 760 компенсации электронного нуля, программы 780 определения механического нуля и программы 790 компенсации механического нуля. Как было в целом рассмотрено выше, программа 700 с помощью программы 710 определяет текущие вызванные расходом величины Δt для пары каналов, работающих в данный момент в измерительном режиме, и определяет текущую величину электронного нуля для другой пары каналов, работающих в нулевом режиме. Программа 760 компенсирует каждую измеренную величину Δt для пары каналов, работающих в измерительном режиме, наиболее свежей величиной электронного нуля для этого канала. Программа 780 определяет механический ноль расходомера. И, наконец, программа 790 корректирует вызванную расходом величину Δt для текущей пары каналов, работающих в измерительном режиме, величиной механического нуля расходомера.
Точнее, при входе в программу 700, а именно в программу 710, сначала выполняется блок 703 принятия решения. Этот блок определяет, будет ли величина переменного состояния означать, что пара каналов A-C обнуляется, то есть состояние схемы 70 будет задаваться величиной "60" (см. фиг. 5). Эта величина создается схемой 70 под управлением микропроцессора 80 (см. фиг. 3а и 3б). В случае наличия этого состояния выполнение продолжается по утвердительной ветви блока 703 принятия решения, как показано на фиг. 7а и 7б блоком 706. Выполнение этого последнего блока обновляет величину суммарной нормирующей переменной (TOTAL-RATE) текущей величиной RAW RATE A. Как будет видно, при окончании интервала обнуления эта суммарная нормирующая величина устанавливается равной нулю. Далее выполняется блок 709 для установления временного флага (TEMP-STATE) на величину (ZEROING CHANNEL A), которая означает, что пара каналов A-C в данный момент обнуляется. Как только это произойдет, начнется выполнение блока 712 для простого приращения величины счетчика циклов (COU NTER) на единицу. Затем производится переход к блоку 730 принятия решения. Или, наоборот, если текущая величина переменной STATE означает, что пара каналов A-C не обнуляется, то выполнение продолжается по отрицательной ветви из блока 703 принятия решения на блок 715 принятия решения. Последний проверяет состояние временного флага, чтобы определить, не закончилось ли обнуление пары каналов A-C, то есть по прежнему ли равна величина этого флага величине ZEROING CHANNEL A. Если обнуление этой пары каналов уже закончилось, блок 715 принятия решения продолжает выполнение по утвердительной ветви на блок 718. Этот последний блок рассчитывает величину электронного нуля для пары каналов A-C, т.е. ELEKT ZERO A, как среднее значение отдельных измерений, которые были суммированы, а именно как величину переменной TOTAL-RATE, деленную на содержимое счетчика циклов COUNTER. После этого выполнение переходит к блоку 724, который просто сбрасывает величины счетчика циклов и суммарной нормирующей переменной на ноль. Затем выполнение переходит к блоку 730 принятия решения. В противном случае выполнение также переходит к этому блоку, но по отрицательной ветви из блока 715 принятия решения в том случае, если пара каналов A-C не обнулилась или еще не закончила обнуление.
Блоки 730-751 обеспечивают те же самые операции, что и блоки 703-724, но для определения величины электронного нуля пары каналов B-C, то есть ELEKT ZERO B. А именно, блок 730 принятия решения определяет, означает ли величина переменной STATE, что пара каналов B-C обнуляется, т.е. состояние схемы 70 задается величиной "46" (см. фиг.5). Если это состояние в данный момент имеет место, то выполнение продолжается по утвердительной ветви из блока 730 принятия решения, как показано на фиг. 7а и 7б, на блок 733. При выполнении этого блока происходит обновление величины суммарной нормирующей переменной TOTAL-RATE текущей величиной RAW RATE B. Как будет видно в конце этого интервала обнуления, эта суммарная нормирующая величина устанавливается равной нулю. Затем выполняется блок 736 для установки состояния временного флага TEMP - STATE на величину ZEROING CHANNEL B, которая означает, что пара каналов B-C в данный момент обнуляется. Как только это произойдет, выполнение переходит на блок 739 для простого приращения величины счетчика циклов, COUNTER, на единицу. Затем начинается выполнение программы 760. Или, наоборот, если текущая величина переменной означает, что пара каналов B-C не обнуляется, то выполнение продолжается по отрицательной ветви из блока 730 принятия решения на блок 742 принятия решения. Последний проверяет состояние временного флага, чтобы определить, не закончилось ли обнуление пары каналов B-C, т.е. по прежнему ли равна величина этого флага величине ZEROING CABBEL B. Если обнуление этой пары каналов уже закончилось, блок 742 принятия решения продолжает выполнение по утвердительной ветки на блок 745. Этот последний блок рассчитывает величину электронного нуля для пары каналов В-C, то есть ELECT ZERO B, как среднее значение отдельных измерений, которые были суммированы, а именно, как величину переменной TOTAL-RATE, деленную на содержимое счетчика циклов COUNTER. После этого выполнение переходит к блоку 748, который устанавливает другое значение величины временного флага, в данном случае значение NOT ZEROING CHANNEL B, которое означает, что пара каналов B-C не обнуляется. Затем выполнение переходит к блоку 751, который просто сбрасывает величины счетчика циклов и суммарной нормирующей переменной на ноль. Затем выполнение переходит к программе 760. В противном случае выполнение также переходит к этой программе, но по отрицательной ветви из блока 742 принятия решения в том случае, если пара каналов B-C не обнулялась или еще не закончила обнуление. Поскольку в любой данный момент времени только одна пара каналов работает в нулевом режиме, то в этот момент времени с помощью описанных выше соответствующих операций выполнение программы производится для одной из двух переменных ELEKT ZЕRO A или ELEKT ZERO B.
Программа 760 компенсации электронного нуля просто корректирует (компенсирует) текущее измерение Δt на величину электронного нуля для конкретной пары каналов, обеспечивающей это измерение. А именно, при входе в эту программу выполняется блок 763, который в зависимости от того, какая пара каналов, B-C или A-C, работает в данный момент в измерительном режиме, направляет дальнейшее выполнение программы соответственно либо на блок 767, либо на блок 769. Если выполняется блок 767, то он вычитает величину электронного нуля для пары каналов B-C из RAW RATE B и сохраняет результат в виде переменной Δt. Если, наоборот, происходит выполнение блока 769, то он вычитает величину электронного нуля для пары каналов A-C из RAW RATE A и сохраняет результат в виде переменной Δt. После выполнения одного из блоков 767 или 769 начинается выполнение программы 780 определения механического нуля.
Программа 780 определяет текущую величину механического нуля расходомера. Точнее, при входе в программу 780 выполняется блок 781 принятия решения. При этом определяется, нужно ли определять величину механического нуля. Как уже готовилось выше, механический ноль определяется в условиях нулевого расхода при калибровке расходомера. Если в данное время производится калибровка расходомера и пользователь указывает на отсутствие расхода нажатием соответствующей кнопки измерительной электроники, то блок 781 принятия решения по утвердительной ветви переходит к выполнению блока 784. Этот блок выполняет программу 800 определения механического нуля, подробно описанному ниже, с целью определения текущей величины механического нуля (MECH ZERO) расходомера. После определения этой величины выполнение переходит к программе 790 компенсации механического нуля. Если же в данное время калибровка не проводится или если пользователь не указал на отсутствие расхода, то выполнение переходит к программе 790 по отрицательной ветви блока 781 принятия решения.
Программа 790 определения механического нуля содержит блок 792, который просто вычитает текущую величину механического нуля MECH ZERO из величины переменной Δt, результатом чего является скорректированное измерение Δt, которая затем будет фильтроваться и использоваться главным циклом 600 (а именно блоками 630, и 640, как показано на фиг. 6) для определения текущей величины удельного массового расхода. После выполнения блока 792 происходит выход из программ 790 и 700, как показано на фиг. 7а и 7б, и осуществляется переход к базовому главному циклу 600 измерения расхода.
Для упрощения программного обеспечения программа 700 не содержит соответствующего программного обеспечения для определения скорректированных величин Δt для обеих пар каналов во время каждого "активного" интервала и, как описано выше, для сравнения результатов с целью определения достаточного расхождения между ними и связанных с ними системных погрешностей. Для учета этого программа 700 может быть просто изменена любым специалистом в данной области техники.
Фиг. 8а и 8б совместно представляют диаграмму процесса, выполняемого программой 800 определения механического нуля, совмещение листов этих чертежей показано на фиг. 8. Как уже говорилось выше, программа 800 определяет текущую величину механического нуля расходомера. Действительно, текущая величина этого нуля определяется сначала вычислением стандартного отклонения δΔt величин Δt, полученных при условии отсутствия расхода во время калибровки расходомера. Это стандартное отклонение дает меру шума, повторяющегося в измерениях Δt при условии отсутствия расхода. Только если шум достаточно мал, то есть если величина стандартного отклонения ниже минимальной пороговой величины, наиболее свежая величина механического нуля может обновляться, чтобы отражать его текущую величину, в противном случае эта текущая величина просто будет игнорироваться. Число измеренный величин Δt, используемое в определении стандартного отклонения, задается по одному из трех критериев: (a) когда "бегущее" стандартное отклонение оказывается ниже предела сходимости, (b) пользователь прекращает механическое обнуление нажатием соответствующей кнопки и (c) если взято заранее заданное число измеренных величин Δt. Кроме того, проводятся соответствующие предельные проверки, чтобы гарантировать, что текущая величина механического нуля лежит в пределах заранее заданных границ, прежде чем заменять его самую свежую величину текущей.
Точнее, при входе в программу 800 выполняется блок 803 принятия решения. Он проверяет состояние флага (ZERO STATE), чтобы определить, идет ли в данный момент процесс определения механического нуля. Этот флаг выставляется соответствующей программой (не показано) с целью окончания этого процесса. Если этот процесс идет, блок 803 принятия решения направляет выполнение программы по своей утвердительной ветви на блок 806. При выполнении блока 806 величина суммарной переменной (ZERO TOTAL) обновляется текущей величиной Δt. Как станет видно позже, эта суммарная величина становится равной нулю при окончании интервала обнуления. После выполнения блока 806 выполняется блок 809 для приращения содержимого счетчика циклов ZERO COUNT на единицу. Затем выполнение программы переходит в блок 820 принятия решения. В свою очередь, если величина механического нуля в данный момент не определяется, т.е. состояние флага ZERO STATE не является активным, то выполнение проходит по отрицательной ветви блока 803 принятия решения на блок 812. Этот блок переводит флаг ZERO STATE в активное состояние, устанавливает величины ZERO TOTAL и ZERO COUN на ноль и устанавливает величину переменной MIN STD DEY на большое заранее заданное число (точная величина которого не критична, если только на много не превышает предлагаемую величину стандартного отклонения). Затем выполняется блок 816 для сброса всех флагов ошибок, связанных с процессом определения механического нуля. После этого выполнение переходит к блоку 820 принятия решения.
Блок 820 принятия решения определяет, есть ли для определения величины механического нуля минимальное число измеренных величин Δt, т.е. превысила ли текущая величина счетчика циклов ZERO COUNT заранее заданную минимальную величину MIN ZERO COUNT, которая обычно равна десятичной величине "100". Если имеется недостаточное число величин Δt, происходит выход из программы 800 по ветви 872 и отрицательной ветви 822 блока 820. Если, в свою очередь, имеется минимальное число величин Δt, то блок 820 принятия решения направляет выполнение по утвердительной ветви на блок 823. Этот последний блок обновляет стандартное отклонение с величин Δt, которые были только что измерены для определения величины механического нуля, и сохраняет результат в переменной STD DEY. После этого выполнение переходит к блоку 826 принятия решения, который сравнивает величину полученного стандартного отклонения с ее минимальной величиной. Если полученное стандартное отклонение меньше минимальной величины, блок 826 принятия решения направляет выполнение по своей утвердительной ветви на блок 829. Этот последний блок вычисляет временную текущую величину механического нуля (MECH ZERO TEMP) как среднее значение суммарных величин Δt, только что полученных в текущем процессе определения механического нуля, т.е. величину ZERO TOTAL, деленную на содержимое счетчика циклов ZERO COUNT. Как только это происходит, блок 829 устанавливает величину минимального стандартного отклонения, равную текущей величине стандартного отклонения. За счет этого минимальная величина стандартного отклонения, которая только что была определена для этого текущего процесса определения механического нуля, будет всегда использоваться описанным ниже способом для определения, не является ли текущая величина механического нуля слишком шумящей и, следовательно, неприемлемой. После полного выполнения блока 829 выполняется блок 832 принятия решения. В противном случае, если текущая величина стандартного отклонения равна или превышает свою минимальную величину, выполнение также перейдет на блок 832, но по отрицательной ветви блока 826 принятия решения.
В этой точке проводится до трех отдельных проверок с помощью блоков принятия решения 832, 836 и 840, чтобы определить, было ли взято достаточное число измеренных величин Δt для определения текущей величины механического нуля. Эти измерения продолжаются до получения достаточного числа. В частности, блок 832 принятия решения определяет, не меньше ли предела сходимости текущая величина стандартного отклонения. Если стандартное отклонение уменьшалось с последовательными величинами Δt и упало ниже заранее заданной предельной величины, то нежелательно, чтобы любые дополнительные измерения повредили величине механического нуля. Соответственно, если стандартное отклонение уменьшилось таким образом, то блок 832 принятия решения продолжает выполнение по утвердительной ветви, переходя на блок 843. Если, наоборот, текущая величина стандартного отклонения все еще выше предела сходимости, то выполнение продолжается по отрицательной ветви блока 832 принятия решения, и выполняется блок 836. Этот последний блок принятия решения определяет, не нажал ли пользователь кнопку или не обозначил ли каким-то другим образом окончание текущего процесса определения механического нуля. Если пользователь закончил процесс, блок 836 принятия решения продолжает выполнение по утвердительной ветви, переходя к блоку 843 принятия решения. Если, наоборот, пользователь не закончил процесс определения механического нуля, тогда блок 836 принятия решения направляет выполнение по отрицательной ветви на блок 840 принятия решения. Блок 840 принятия решения определяет, не было ли получено максимальное число MAX COUNT измеренных величин Δt. Если это максимальное число измерений, например 2000 измерений, было сделано, то блок 840 принятия решения направляет выполнение по утвердительной ветви на блок 843. Если, наоборот, максимального числа измерений не было, то происходит выход из программы 800 по отрицательной ветви 841 блока 840 принятия решения и по ветви 872 с целью необходимой обработки следующего последовательного измерения Δt.
В этой точке программы 800 текущая величина, хоть и временная, для механического нуля определена на основании достаточного числа последовательных измерений Δt. Блоки 843, 846 и 849 принятия решения теперь определяют, лежит ли эта величина в заранее заданных пределах, например +/-3 мкс, и является ли эта величина механического нуля относительно свободной от шума. А именно, блок 843 принятия решения определяет, не меньше ли текущая временная величина механического нуля, чем нижний предел, то есть -3 мкс. Если этот предел отрицательно превышен, блок 843 принятия решения направляет выполнение по утвердительной ветви на блок 854. Поскольку это означает наличие ошибки, то при выполнении блока 854 устанавливается в единицу величина соответствующего флага ошибки, т. е. MECHANICAL XERO TOO LOW. Если, наоборот, нижний предел отрицательно не превышен, блок 843 принятия решения направляет выполнение по отрицательной ветви на блок 846 принятия решения. Этот последний блок принятия решения определяет, не превышает ли текущая временная величина механического нуля верхнего предела, т. е. +3 мкс. Если этот предел положительно превышен, блок 846 принятия решения направляет выполнение по отрицательной ветви на блок 859. Поскольку это означает наличие ошибки, то при выполнении блока 859 устанавливается в единицу величина соответствующего флага ошибки, MECHANICAL ZERO TOO HIGH. Величины верхнего и нижнего пределов +/-3 мкс определены эмпирически как величины, в пределах которых должны находиться все величины Δt при условии отсутствия расхода для расходомеров, недавно изготовленных настоящим патентовлдельцем. Если, наоборот, ни один из этих пределов не превышен, блок 846 принятия решения направляет выполнение по отрицательной ветви на блок 851 принятия решения. Последний блок принятия решения определяет, является ли временная величина механического нуля достаточно свободной от шума, то есть действительно ли все последовательные величины Δt, использованные для получения этой величины, меньше заданных пределов изменения за счет сравнения данной величины минимального стандартного отклонения с пределом, равным заранее заданному целому числу, кратному n, которое обычно вдвое превышает предел сходимости.
Поэтому наиболее воспроизводимая величина механического нуля обычно бывает, когда стандартное отклонение достигает своей минимальной величины. Оказывается, что это происходит потому, что измеренные величины Δt будут подвергаться воздействию периодического шума, такого как сетевые помехи с частотой 60 Гц и их гармоники, которые создают биение скорости отбора сигналов датчика скорости (то есть счетчики 75 считываются один раз за каждый цикл трубопровода), создавая за счет этого частоты биений, появляющиеся в измеренных величинах Δt. При нормальной работе, как считает автор, всегда присутствует некоторое количество такого шума, хотя амплитуда его обычно изменяется от установки к установке. Для диапазона расходомеров, изготовленных настоящим заявителем, сигналы скорости имеют основные частоты в диапазоне 30 - 180 Гц. Амплитуда биений должна быть наименьшей, когда шум синфазен скорости отбора, и увеличиваться по мере того, как шум постепенно становится не совпадающим по фазе со скоростью отбора, приводя тем самым к увеличенной изменчивости и ошибке измеренных в отсутствие расхода величин Δt. Следовательно, минимальная величина стандартного отклонения используется, чтобы определить, не будет ли результирующая механическая величина слишком шумящей. А именно, если блок 851 принятия решения определит, что минимальное стандартное отклонение превышает предел, равный n-кратному пределу сходимости, то текущая временная величина механического нуля просто является слишком сильно шумящей и не учитывается. Поскольку это означает наличие ошибки, то блок 851 принятия решения направляет выполнение по утвердительной ветви на блок 862. При выполнении этого последнего блока величина соответствующего флага ошибки, т. е. MECHANICAL ZERO TOO NOISY, устанавливается в единицу. Если, наоборот, минимальное стандартное отклонение достаточно мало, означая тем самым, что временная величина механического нуля относительно свободна от шума, то блок 851 принятия решения направляет выполнение по отрицательной ветви на блок 865. Этот последний блок обновляет величину механического нуля MECH ZERO так, чтобы она стала равна величине временного механического нуля MECH ZERO TEMP. После выполнения блоков 854, 859, 862 или 865 выполняется блок 870, который, в свою очередь, устанавливает неактивное состояние флага ZERO STATE, чтобы отразить тот факт, что процесс определения механического нуля закончен и в данный момент не проводится. Как только это произойдет, осуществляется выход из программы 800.
Иллюстрируя процесс получения механического нуля, фиг. 9 схематично представляет соответствующие операции обнуления, которые имеют место для каждого соответствующего диапазона стандартного отклонения Δt, которое может быть получено в данном процессе.
А именно, когда величина Δt попадает в область 910 и, следовательно, меньше предела сходимости (1), обнуление сразу же прекращается, а результирующая величина механического нуля принимается. Для любой величины Δt, лежащей в области 920 и, следовательно, большей, чем предел сходимости, но меньшей, чем n таких пределов, обнуление продолжается, пока не будет получено максимальное число измерений Δt, определяемое величиной переменной MAX-COUNT. Это число в циклах трубопровода определяет максимальный интервал обнуления. Для любой величины Δt, лежащей в области 930 и, следовательно, превышающей n-кратный предел сходимости, обнуление немедленно останавливается. Соответствующая текущая величина механического нуля не учитывается, а вместо нее берется последняя наиболее свежая величина.
Фиг. 10 схематично представляет диапазоны допустимых и недопустимых величин механического нуля. Здесь ошибочными величинами механического нуля являются те, что лежат либо в области 1020 и, следовательно, отрицательно больше, чем отрицательный предел -3 мкс, либо те, что лежат в области 1030 и положительно больше, чем положительный предел +3 мкс. Если определяется механический ноль такой величины, он просто не учитывается. Воспринимаются только те величины механического нуля, которые лежат в области 1010 и, следовательно, находятся между отрицательным и положительным пределами.
Фиг. 11 показывает диаграмму процесса работы программы обработки РТД-температуры 1100. Как уже говорилось выше, эта программа работает с управлением по прерываниям через каждые 0,8 с, чтобы обеспечить оцифрованную величину температуры проточной трубки, которая по существу нечувствительна к температурному дрейфу РТД, и с помощью этой величины вычислить текущую величину температурно компенсированного измерительного коэффициента (РГ). Эта величина затем сохраняется в базе данных микрокомпьютера для последующего использования программой 600 при определении текущей величины удельного массового расхода.
При входе в программу 1100 сначала выполняется блок 1100. Он заставляет аналоговый переключатель 35 подавать напряжение РТД на вход V/F-преобразователя 41 (см. фиг. 3а и 3б) для последующего преобразования. Чтобы вызвать именно это, микрокомпьютер передает по проводам 82 и 84 в логику управления соответствующий адрес и сигналы управления. Эти сигналы, в свою очередь, заставляют логику подавать соответствующие сигналы выбора по проводам 34 на аналоговый переключатель. Когда это произойдет и истечет соответствующий интервал счета, блок 1110, показанный на фиг. 11, считывает содержимое счетчика 78, показанного на фиг. 3а и 3б, который содержит сосчитанную величину, пропорциональную частоте преобразованного аналогового напряжения РТД. После этого, как показано на фиг. 11, выполняется блок 1120. Он фильтрует содержимое, которое было считано со счетчика 78 двухполюсного программного фильтра и сохраняет полученную фильтровальную величину до временной переменной V TO F.
После этого выполняется блок 1130, который исключает величину смещения нуля из фильтрованной величины, чтобы получить текущую частотную величину CURRENT FREQ. Эта величина смещения нуля FREQ AT OV является ненулевой фильтрованной сосчитанной частотной выходной величиной, которую вырабатывает V/F-преобразователь при подаче на него нулевого входного напряжения  Затем выполняется блок 1140, чтобы вычислить коэффициент пропорциональности FREQ PERC, показывающий число счетов на градус Цельсия. Этот коэффициент просто определяется разницей фильтрованных сосчитанных величин для двух эталонных напряжений
Затем выполняется блок 1140, чтобы вычислить коэффициент пропорциональности FREQ PERC, показывающий число счетов на градус Цельсия. Этот коэффициент просто определяется разницей фильтрованных сосчитанных величин для двух эталонных напряжений  которые для примера взяты равными соответственно потенциалу земли и 1,9 B, деленной на десятичное число "380". Поскольку сосчитанные частотные величины для обоих эталонных напряжений получаются по существу одновременно с любым изменением температуры проточной трубки, то любой температурный дрейф V/F-преобразователя будет вносить по существу равную компоненту ошибки в обе сосчитанные величины. Поскольку коэффициент пропорциональности вычисляется с помощью разности между этими сосчитанными величинами, а не с помощью величины одной из них, то величина коэффициента пропорциональности будет по существу независимой от любого сдвига в сосчитанном V/F-выходе, относящемся к температурному дрейфу. Эта величина смещения нуля (FREQ AT OV) и фильтрованная сосчитанная эталонная величина 1,9 В(FREQ AT. 1 9V) определяются периодически с управлением по прерыванию через каждые 0,8 с от другой не показанной программы. Эта программа, вполне понятная для любого специалиста в данной области техники, заставляет схему 70 подавать подходящие сигналы выбора на аналоговый переключатель, чтобы сначала пропускать при управлении по прерываниям либо земляной потенциал
которые для примера взяты равными соответственно потенциалу земли и 1,9 B, деленной на десятичное число "380". Поскольку сосчитанные частотные величины для обоих эталонных напряжений получаются по существу одновременно с любым изменением температуры проточной трубки, то любой температурный дрейф V/F-преобразователя будет вносить по существу равную компоненту ошибки в обе сосчитанные величины. Поскольку коэффициент пропорциональности вычисляется с помощью разности между этими сосчитанными величинами, а не с помощью величины одной из них, то величина коэффициента пропорциональности будет по существу независимой от любого сдвига в сосчитанном V/F-выходе, относящемся к температурному дрейфу. Эта величина смещения нуля (FREQ AT OV) и фильтрованная сосчитанная эталонная величина 1,9 В(FREQ AT. 1 9V) определяются периодически с управлением по прерыванию через каждые 0,8 с от другой не показанной программы. Эта программа, вполне понятная для любого специалиста в данной области техники, заставляет схему 70 подавать подходящие сигналы выбора на аналоговый переключатель, чтобы сначала пропускать при управлении по прерываниям либо земляной потенциал  либо 1,9 В
либо 1,9 В  на вход преобразователя 41, а затем последовательно считать частотную величину, полученную из него, а затем считывать и фильтровать эту величину и сохранять фильтрованные результаты.
на вход преобразователя 41, а затем последовательно считать частотную величину, полученную из него, а затем считывать и фильтровать эту величину и сохранять фильтрованные результаты.
Как только блоком 1140 будет определен коэффициент пропорциональности, выполняется блок 1150. Этот блок вычисляет текущую температуру (TEMP), измеряемую РТД, за счет деления текущей частотной величины на коэффициент пропорциональности. После этого выполняется блок 1160, который вычисляет температурно компенсированный измерительный коэффициент РГ с помощью величины измерительного коэффициента и текущей величины температуры. Для кориолисова расходомера измерительный коэффициент является известной константой, которая эмпирически определяется при его изготовлении. Как только этот температурно компенсированный измерительный коэффициент будет определен, он сохраняется в базе данных для последующего использования в определении удельного массового расхода. После этого осуществляется выход из программы 1100.
Специалистам в данной области техники должно быть вполне понятно, что несмотря на то, что обе пары каналов работают параллельно, так что одна из них работает в нулевом режиме, в то время как другая работает в измерительном режиме, они могут работать и последовательно. В таком случае работающая пара каналов должна функционировать в нулевом и/или измерительном режиме, в то время как другая будет оставаться в нерабочем состоянии. Затем пары каналов могут периодически переключаться из рабочего состояния в нерабочее по окончании каждого из режимов или после того, как работающая пара каналов последовательно пройдет как нулевой, так и измерительный режимы. В этих случаях, когда одна эффективно работающая пара каналов работает в нулевом режиме, измерения расхода проводиться не будут. Соответственно вместо измерений реального расхода придется делать предположение относительно того расхода, который был в это время. Следовательно, за счет исключения непрерывных измерений расхода эффективное использование в кориолисовом расходомере только одной работающей пары каналов независимо от того, содержит ли он только одну физическую пару каналов, которая циклически переключается между двумя режимами, или две пары, одна из которых в любое время неактивна, может привести к несколько неточным измерениям расхода. В отличие от этого, поскольку соответствующая настоящему изобретению схема измерения расхода 30 всегда имеет одну пару каналов, которая при нормальных операциях измерения расхода активно измеряет реальный расход в любое время, расходомер обеспечивает очень точные измерения расхода за счет лишь небольшого увеличения сложности схем.
Более того, несмотря на то, что "активный" интервал предусмотрен для любой пары каналов в пределах нулевого режима, во время которого, например, могут проводиться двойные измерения расхода и их сравнения между парами каналов, этот интервал можно исключить, если это необходимо, не нарушая точности измерений. В действительности, это может либо использоваться для сокращения длительности нулевого режима за счет одного интервала обнуления (т. е. времени, в течение которого пара каналов будет вместо этого работать в "активном" интервале), либо для увеличения времени, в течение которого эта пара каналов реально обнуляется за счет соответствующего увеличения числа измерений внутренней фазовой задержки, которые будут проводиться после этого.
Кроме того, специалистам в данной области техники должно быть ясно, что хотя описанный вариант осуществления настоящего изобретения использует U-образные проточные трубопроводы, можно использовать проточные трубопроводы (трубки) почти любой формы и размера, лишь бы они могли колебаться относительно оси для создания неинерционной системы отсчета. Например, эти трубопроводы могут содержать, не ограничиваясь этим, прямые трубки, S-образные или петлевые трубопроводы. Более того, хотя расходомер показан содержащим две параллельные проточные трубки, при желании могут использоваться варианты его осуществления с одной или более чем с двумя проточными трубками, например с тремя, четырьмя и более.
Несмотря на то, что показан и подробно описан только один вариант осуществления настоящего изобретения, специалистами в данной области техники могут быть предложено множество других измененных вариантов, не выходящих за пределы объема настоящего изобретения.
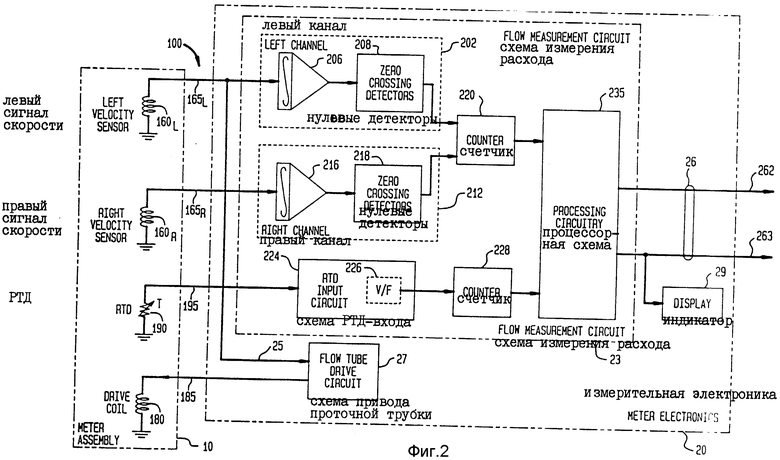
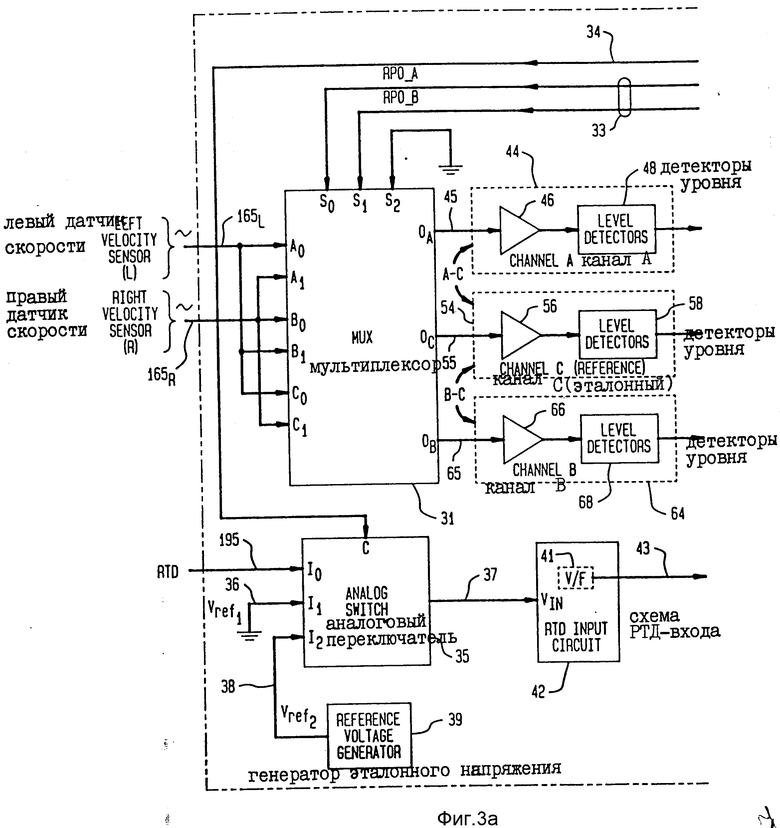
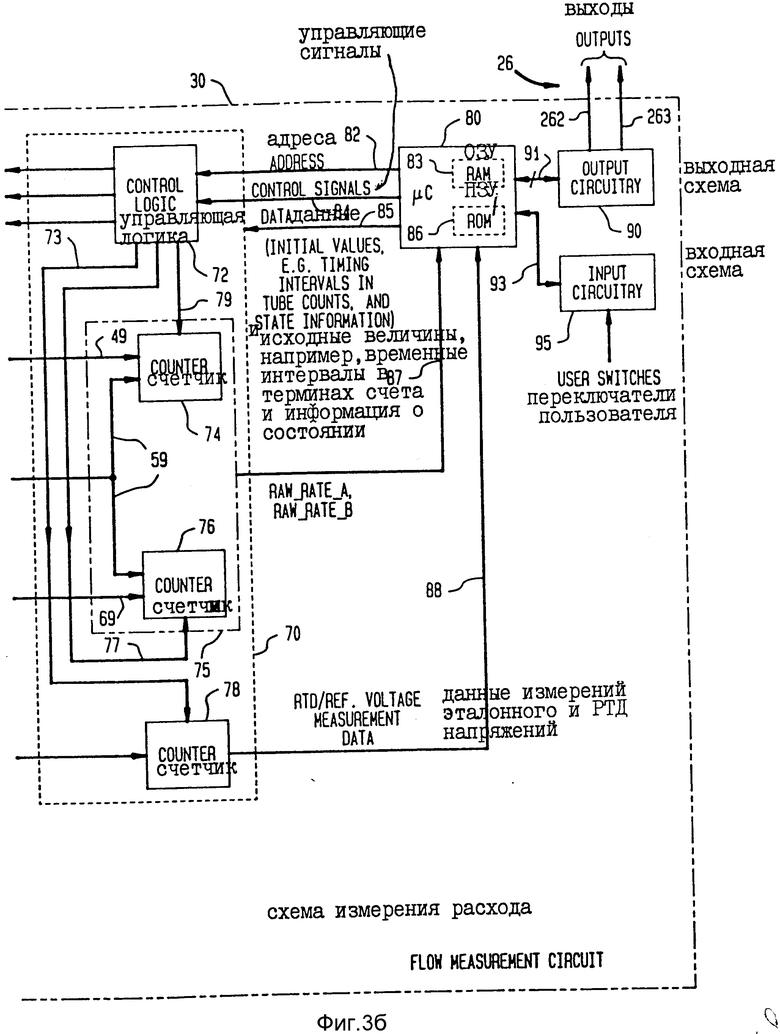
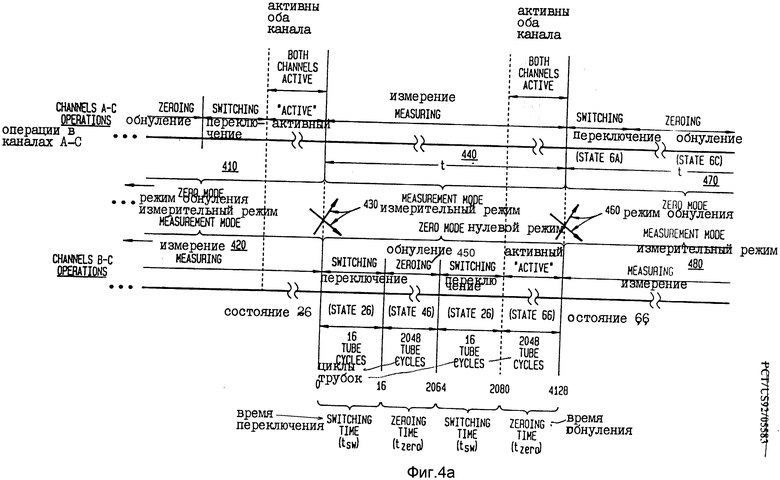
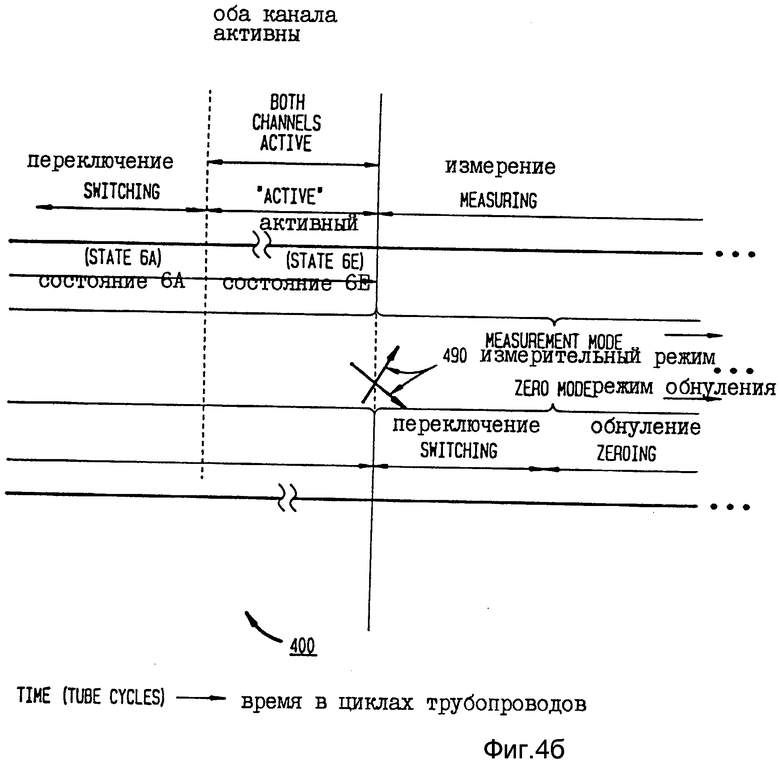
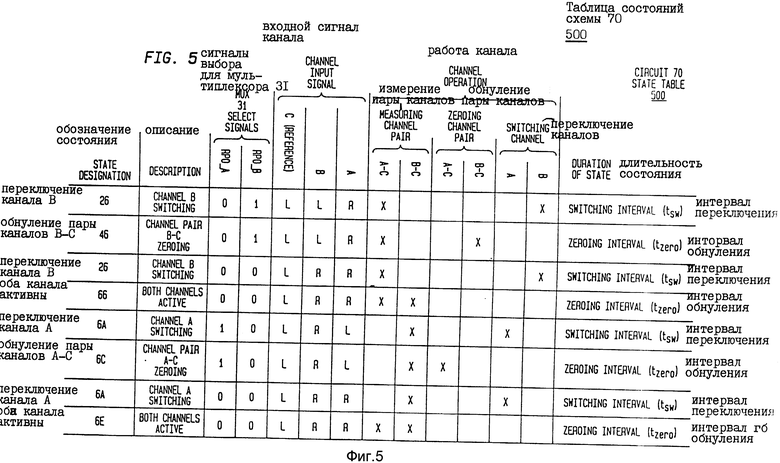
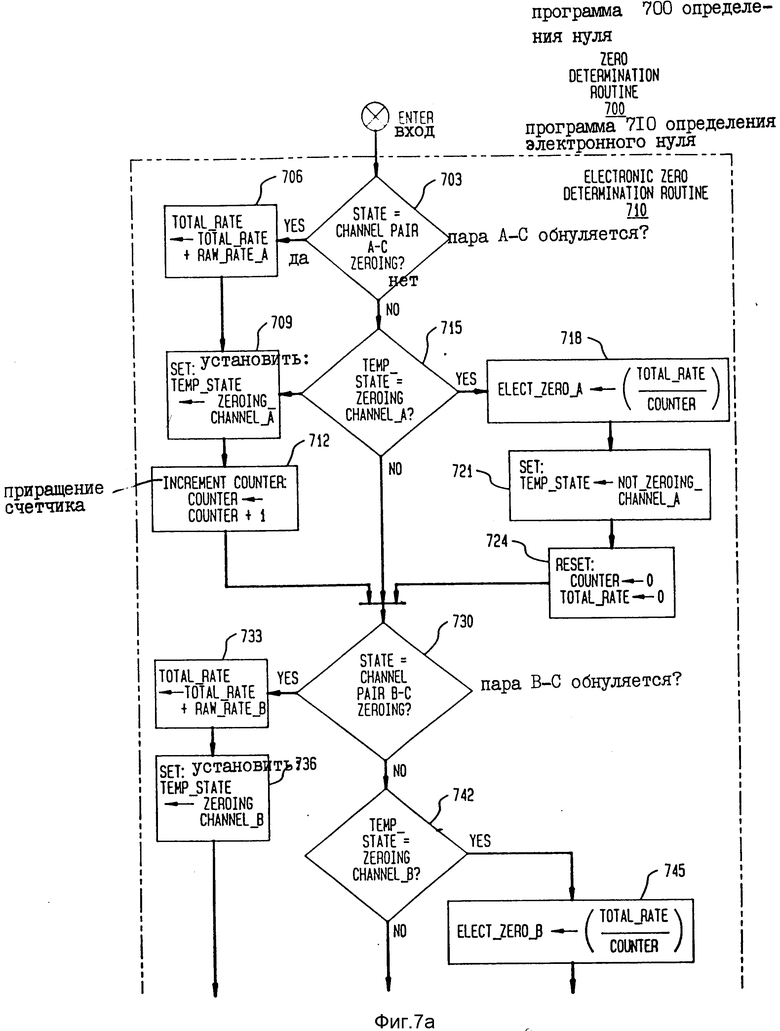
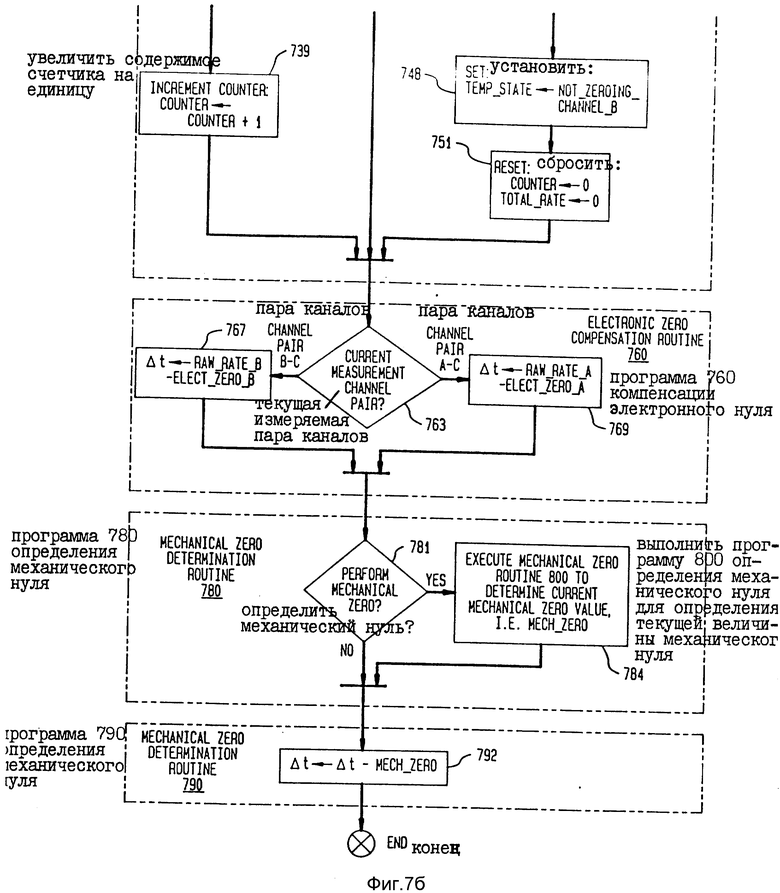
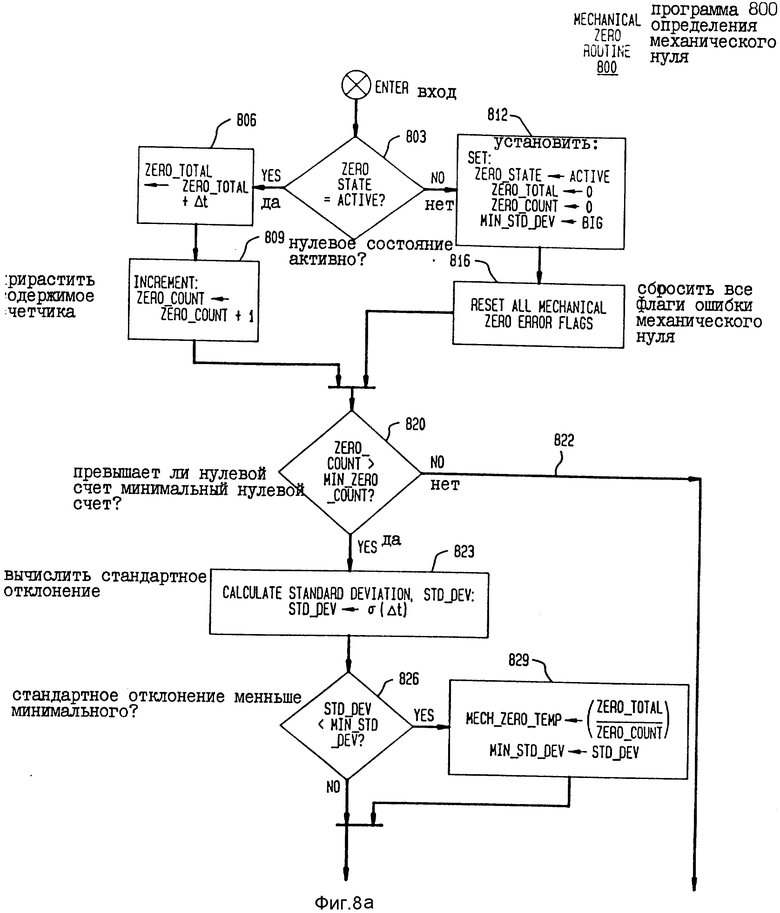
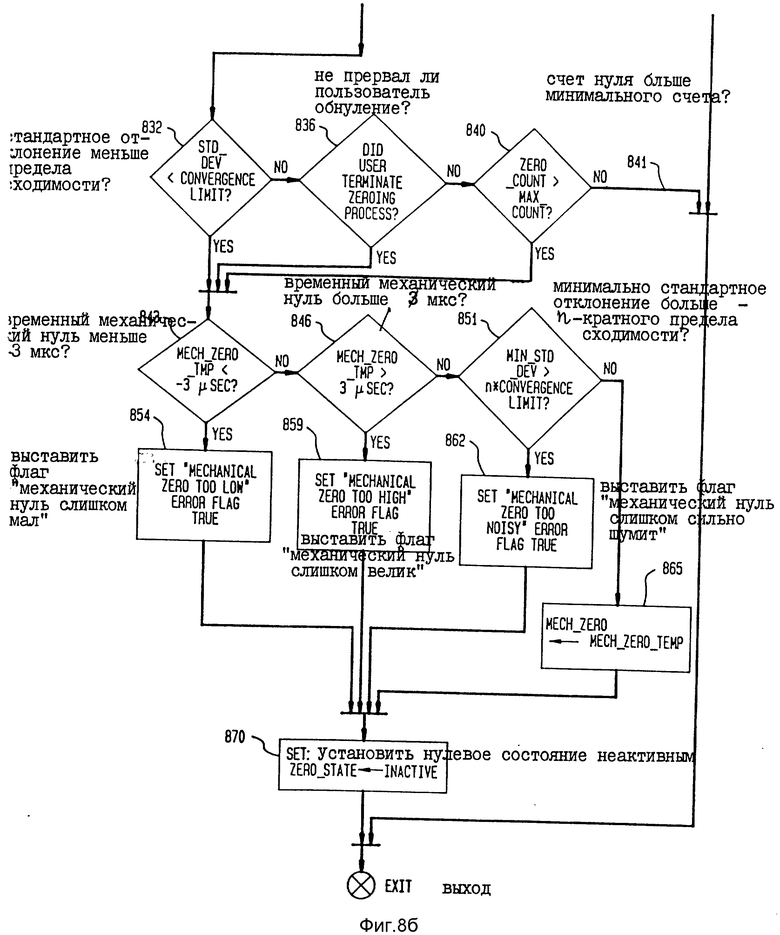
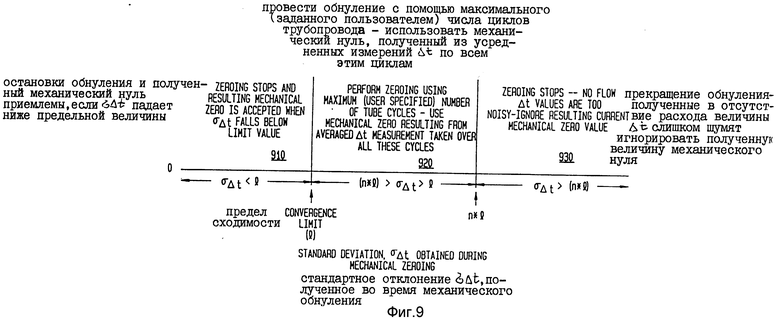
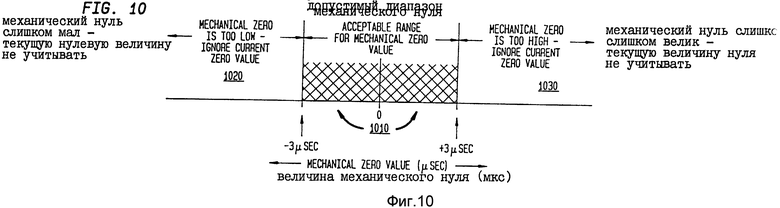
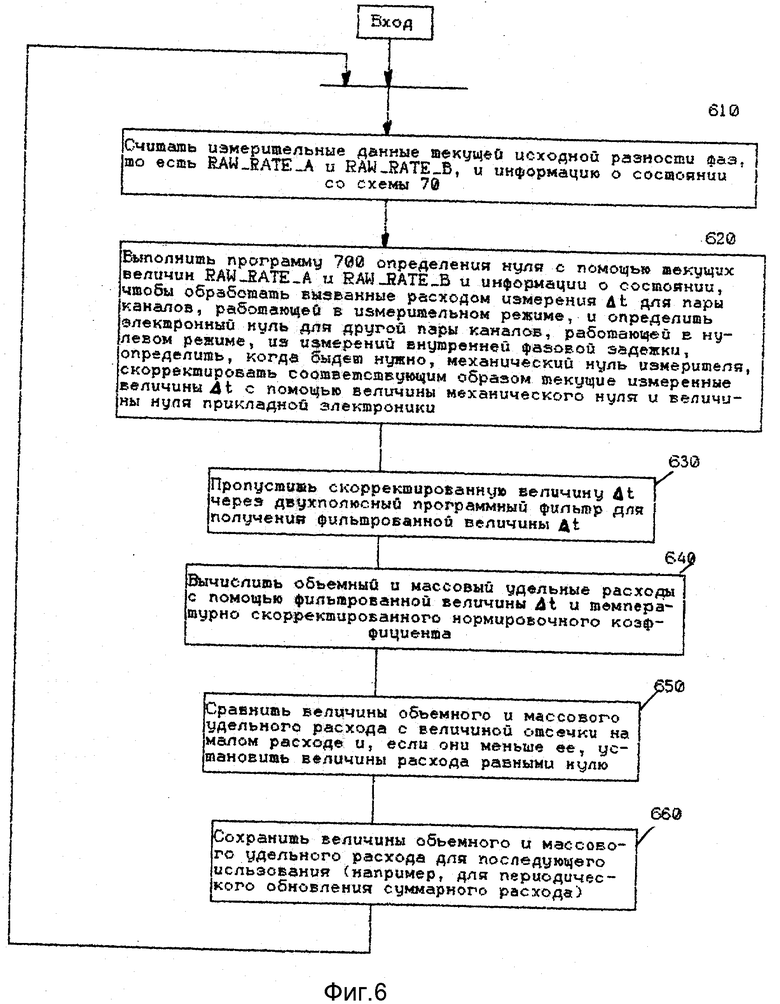
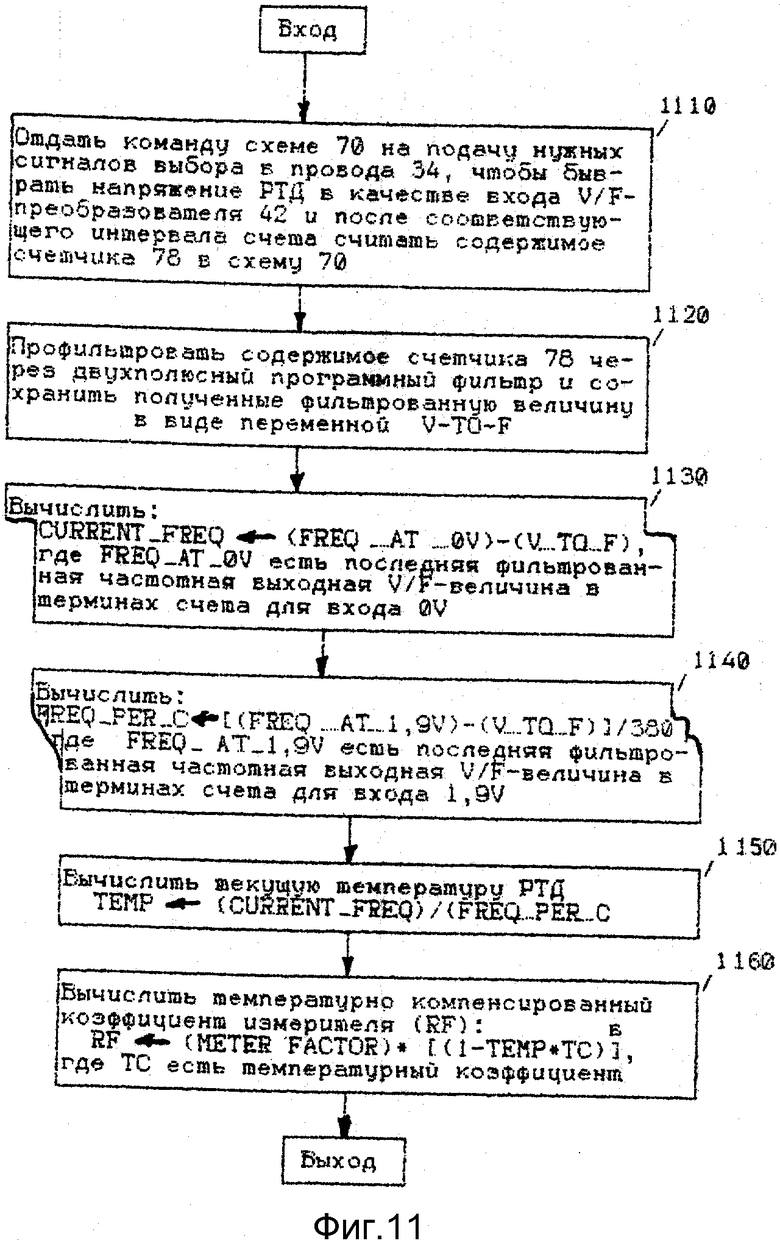
Изобретение относится к измерению расходов и направлено на создание расходомера, исключающего необходимость использования корпуса с управляемой температурой, а также на уменьшение погрешности расходомера. В процессе работы измеритель измеряет внутреннюю фазовую задержку каждой из двух пар входных каналов, а затем вычитает задержку, связанную с каждой парой, из реальных измеренных данных. В то время как одна пара каналов измеряет реальный расход, другая пара каналов измеряет свою внутреннюю фазовую задержку, причем каналы постоянно циклически переключаются между этими функциями. Поскольку обе пары каналов циклически переключаются с достаточно большой скоростью, текущая величина внутренней фазовой задержки для каждой из пар каналов в точности отражает любые вызванные температурой изменения, происходящие затем в работе этой пары, исключая тем самым вызванные температурой ошибочные компоненты из измерений расхода. Кроме того, измеритель измеряет температуру проточной трубки для устранения ошибок, вызванных температурой. Более того, измеритель также измеряет и обновляет свою величину механического нуля, используя только измерения Δt, полученные в отсутствие расхода, которые имеют достаточно низкое содержание шума. Эта величина механического нуля последовательно вычитается из вызванных расходом измерительных данных для исключения из них ошибок, которые в противном случае будут оставаться. 2 с. и 20 з.п. ф-лы, 11 ил.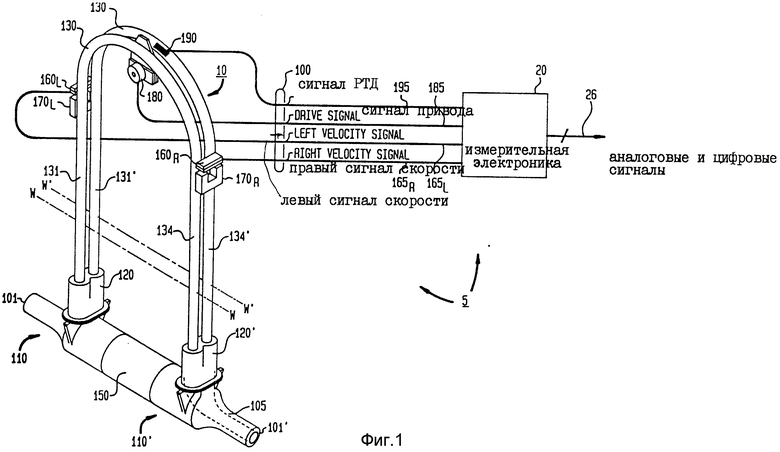
| US 4817448 A, 04.04.89 | |||
| US 4879911 A, 14.11.89 | |||
| US 4872351 A, 10.10.89 | |||
| US 4843890 A, 04.07.89 | |||
| US 4422338 A, 27.12.83 | |||
| US 4491025 A, 01.01.85. |
