Изобретение относится к электромашиностроению, к электротехнике, к робототехнике и может быть использовано в любых исполнительных и силовых электроприводах возвратно-поступательного движения: в станкостроении, в робототехнике, в транспорте, в энергетике, во всех технологических процессах, требующих линейного, управляемого перемещения.
Известен электромеханизм линейного перемещения [1] содержащий корпус с индуктором, якорь с обмоткой и коллектором, установленные на полом валу с возможностью вращения, а внутри полого вала размещен шток линейного перемещения с шариково-винтовым устройством между ними, на полом валу закреплен тормозной диск, взаимодействующий с подпружиненным электромагнитным тормозом с устройством управления.
Недостатками электромеханизма являются небольшие осевые усилия на шпинделе. Кроме того, большим недостатком является необходимость частотного регулирования дополнительным регулятором для останова электромеханизма.
При создании электромеханизмов такого класса, когда вращающийся ротор с помощью шарико-винтовой пары приходит в поступательное движение, необходима достаточно низкая частота вращения магнитного поля и ротора. Для этих целей в американском варианте предусматривается коллекторный двигатель с преобразователем частоты. Мы уже отметили функциональные недостатки первого варианта и низкий КПД второго варианта.
Соотношение между радиальными и осевыми усилиями в таких электромеханизмах определяется выражением:
F = G tg(ψ + ρ)
где G осевое усилие;
F радиальное усилие;
ψ угол подъема винтовой линии;
r угол трения качения винтовой пары.
Оценим углы j и ρ Углом подъема винтовой линии можно варьировать. От этого угла зависит как осевое усилие, так и линейная скорость перемещения. Углом r можно пренебречь при достаточно хорошо закаленных стальных шариках и высокой прочности поверхностей канавок.
Введем в формулу коэффициент полезного действия шарико-винтовой пары h и определим момент M
В линейном двигателе нас интересует не момент M, а осевое усилие G
Как следует из формулы, линейное усилие пропорционально моменту и обратно пропорционально диаметру преобразования шарико-винтовой пары. Анализ формулы приводит к противоречивым выводам. Для больших усилий нужны большие моменты. А увеличение d приводит к уменьшению G и увеличению M. Это противоречие легко можно объяснить. Диаметр является базовой величиной как при электромагнитном преобразовании, так и при преобразовании вращательного движения в поступательное.
Целью изобретения является увеличение эффективности преобразования как электромагнитного, так и шарико-винтового. Преобразование вращательного в поступательное происходит на малом диаметре, а электромагнитное на большом диаметре.
С целью осуществления старт-стопного режима и контроля линейного перемещения на полом валу установлен счетно-тормозной диск. С двух сторон счетного диска поставлена оптоэлектронная пара, а с двух сторон тормозного диска поставлены электромагнитные дисковые тормоза с противодействующими пружинами и обмотками электромагнита.
Обмотки могут питаться как переменным, так и постоянным током. Оптоэлектронная пара так же универсальна, как и двигатель.
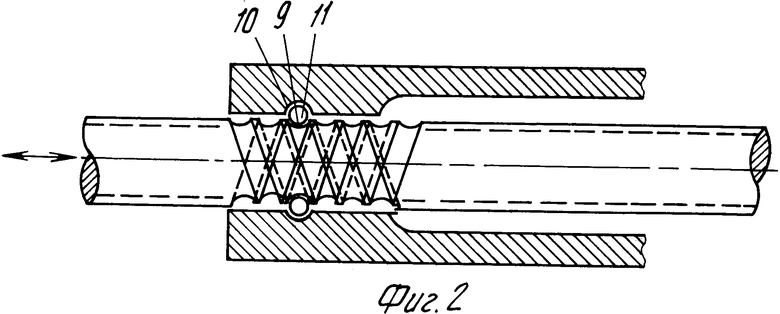
С целью увеличения электромагнитного момента якорь универсального коллекторного двигателя посажен на полый вал, вращающийся в радиальных подшипниках, а преобразование происходит двух- или трехходовым винтом на внутренней поверхности полого вала. В радиальных канавках полукруглого профиля на внутренней поверхности полого вала предусмотрены шарики, разнесенные на угол 360o/n градусов, n≠1, n 2 при двухходовом винте и n 3 при трехходовом. Число таких радиальных каналов не ограничено.
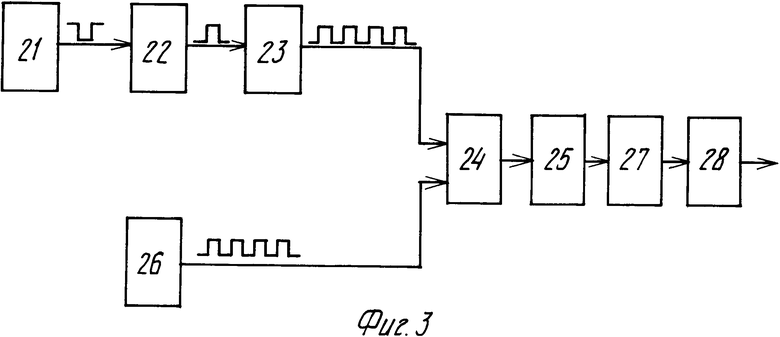
На фиг. 1 представлен общий вид электромеханизма; на фиг. 2 механизм преобразования вращательного движения в поступательное двухходовым винтовым штоком 15; на фиг. 3 схема управления Электромеханизмом Смирнова.
Сигнал с выхода оптопары 21 поступает на инвертор 22, усилитель 23. С задатчика перемещения 26 цифровой сигнал и сигнал с усилителя 23 подаются на компаратор 24 через усилители 25 и 27 и сигнал может быть подан на обмотку электромагнита 23 или на любое другое устройство. Многие элементы схемы могут быть пропущены, например инвертор 22 или промежуточный усилитель 25.
Электромеханизм работает следующим образом.
При подаче переменного или постоянного напряжения на щетки в последовательно с обмоткой якоря включенной обмотке возбуждения возникает магнитный поток. Взаимодействие потока с обмоткой якоря создает момент. Под действием момента полый якорь 8 вращается в радиальных подшипниках 2. Вращение якоря 8 преобразовывается в шарико-винтовых парах 13 в линейное перемещение штока 15. Для свободного вращения якоря 3 и полого вала 17 на обмотки дисковых тормозов должно быть подано переменное или постоянное напряжение. Под действием усилий электромагнита диски тормоза, преодолевая силу противодействия пружин, должны быть притянуты. Диск 11 свободно вращается. Линейный шток перемещается. При снятии напряжения с обмоток электромагнита диск зажимается с двух сторон нажимными дисками. На тормозном диске расположен диск 5 системы слежения. На диске слежения лазерным лучом прорезаны щели с большой плотностью. С двух сторон счетного диска 5 расположена оптопара 6. При перемещении щелей счетного диска мимо оптопары оптический луч или прерывается, или не прерывается. Сигнал усиливается и подается на счетчик импульсов. По нашим данным такая оптоэлектронная пара со счетным диском с эффективным гофрированным профилем подвижного и неподвижных дисков позволяет измерить выдвижение линейного штока на сотую или тысячную долю миллиметра.
Крепление электромеханизма может быть фланцевое, на лапах или любое встроенное в соответствующий механизм. КПД электромеханизма не менее 0,7. При необходимости на полом валу может быть установлен вентилятор или со стороны коллектора, или с противоположной стороны, рядом с тормозным диском.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЗМ В.И.СМИРНОВА | 1992 |
|
RU2102826C1 |
| ДИСКОВОЕ УНИВЕРСАЛЬНОЕ МОТОР-КОЛЕСО СМИРНОВА | 1995 |
|
RU2129964C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2084076C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ФРИКЦИОННЫЙ МНОГОДИСКОВЫЙ ТОРМОЗ | 2018 |
|
RU2695464C1 |
| ЭЛЕКТРОМАГНИТНАЯ ФРИКЦИОННАЯ МУФТА-ТОРМОЗ | 1988 |
|
RU2027087C1 |
| Тормозной электродвигатель | 1984 |
|
SU1239789A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ФРИКЦИОННЫЙ МНОГОДИСКОВЫЙ ТОРМОЗ | 2018 |
|
RU2693756C1 |
| Электродвигатель со встроенным электромагнитным тормозом | 1984 |
|
SU1181066A1 |
| ТОРМОЗНОЙ УЗЕЛ | 2009 |
|
RU2416046C2 |
Использование: в исполнительных и силовых электроприводах возвратно-поступательного перемещения. Сущность изобретения: устройство содержит корпус с индуктором и якорь с обмоткой и коллектором, установленные на полом валу с возможностью вращения, Внутри полого вала размещен шток линейного перемещения с шарико-винтовым устройством между ними. На полом валу также закреплен взаимодействующий с электромагнитным тормозом тормозной диск с прорезями. По обе стороны диска размещена оптоэлектронная пара, сигнал с которой анализируется схемой управления. 3 ил.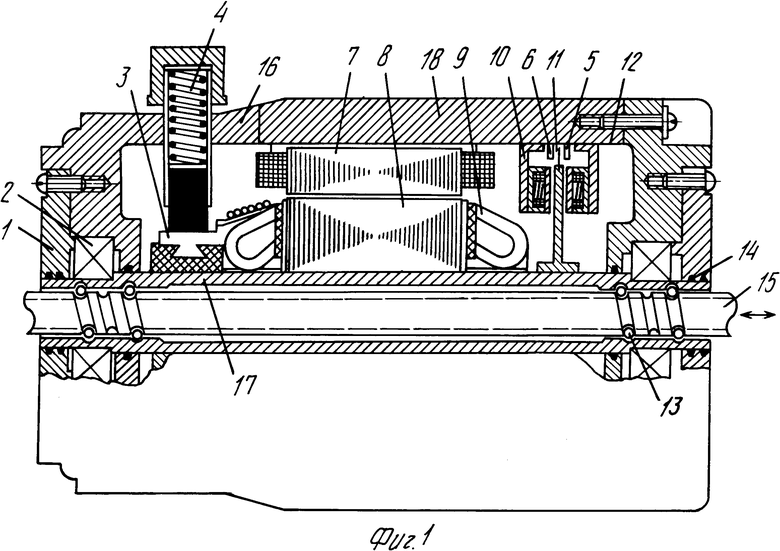
Универсальный коллекторный линейный электромеханизм, содержащий корпус с индуктором, якорь с обмоткой и коллектором, установленные на полом валу с возможностью вращения, а внутри полого вала размещен шток линейного перемещения с шариково-винтовым устройством между ними, на полом валу закреплен тормозной диск, взаимодействующий с подпружиненным электромагнитным тормозом с устройством управления, отличающийся тем, что корпус выполнен магнитопроводящим, на тормозном диске закреплен диск с прорезями, а устройство управления в виде с двух его сторон размещенной оптоэлектронной пары, выход которой, а также задатчик перемещения связаны с компаратором, выход которого связан с обмоткой электромагнитного тормоза.
| US, патент, N 3161074, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
