Область техники.
Изобретение относится к электромеханическим линейным исполнительным механизмам и может быть использовано в приводах точных линейных перемещений, в подвижных системах приборов, в частности, для юстировки оптических элементов, установленных в оправах.
Уровень техники.
Разработка мощной многоканальной лазерной установки «ИСКРА-6» для экспериментов по термоядерному синтезу требует применения большого количества автоматически управляемых оптических элементов, линз, оправ, диафрагм и т.д. Вес этих элементов и соответственно усилия, необходимые для их перемещения, могут колебаться от десятков граммов до десятков и даже сотен килограммов, включая вес оправ и (или) сильфонных развязок, в которых они установлены. Надежное управление многоканальной системой, состоящей из десятков оптических элементов в каждом канале с требуемой точностью, превращается в серьезную проблему. В настоящее время создание простого и надежного привода линейных перемещений, обладающего достаточной точностью, жесткостью и долговременной стабильностью, является актуальной и сложной инженерной задачей.
Известны различные типы приводов линейных перемещений, однако ни один из них не удовлетворяет многочисленным требованиям, предъявляемым к подобным исполнительным устройствам.
Известны приводы линейных перемещений на основе пьезокерамики. Они обладают высокой точностью позиционирования, просты в управлении и относительно дешевы. Но для управления линейными приводами из пьезокерамики требуется высокое напряжение. При отключении управляющего напряжения пьезокерамика «уходит» из требуемого положения. Возврат в требуемое положение при подаче прежнего уровня напряжения не обеспечивается из-за гистерезиса. Перемещение линейных приводов на основе пьезокерамики, как правило, не превышает нескольких десятков микрон, а усилие не превышает нескольких килограммов. Все это резко ограничивает сферу применения линейных приводов из пьезокерамических материалов.
Известен «универсальный коллекторный электромеханизм Смирнова», предназначенный для использования в исполнительных и силовых приводах возвратно-поступательного перемещения. Устройство содержит корпус с индуктором и якорь с обмоткой и коллектором, установленные на полом валу с возможностью вращения. Внутри полого вала размещен шток линейного перемещения с шарико-винтовым устройством между ними. На полом валу также закреплен взаимодействующий с электромагнитным тормозом тормозной диск с прорезями. По обе стороны диска размещена оптоэлектронная пара, сигнал с которой анализируется схемой управления /1/.
Известен привод линейного перемещения, «Устройство управления положением заслонки» /2/, содержащий корпус, моторедуктор, состоящий из шагового двигателя и звена, передающего движение исполнительному механизму. Звено выполнено в виде штока, имеющего резьбу на половине его длины. Поступательное движение штока обусловлено вращательным движением ротора, внутри которого выполнен резьбовой участок, причем резьбовая часть штока двигается в закрытом пространстве корпуса, в передней части которого выполнены отверстия для втулки с ушками от проворота /2/.
Этот привод, как и предыдущий, не может быть использован в точных юстировочных механизмах, так как не обеспечивает высокой точности, а главное требуемой жесткости при больших, тем более знакопеременных нагрузках на вал.
Известен шарико-винтовой механизм преобразования вращательного движения в поступательное, в котором на гайке, кинематически связанной с винтом посредством заполняющих винтовую канавку шариков, заклинено зубчатое колесо. Гайка вмонтирована в корпус и опирается на шариковые подшипники. При осевом движении винта шарики попадают из винтовой канавки в обводной канал и снова направляются в рабочую канавку. Гайка и зубчатое колесо соединены шпонкой /3/.
Устройство правильно построено с точки зрения уменьшения трения в механизме, но не может применяться в узлах с высокими требованиями по точности перемещений, так как имеет большие осевой и радиальный люфты, связанные не только с применением шарико-винтовой пары, но также с осевыми и радиальными люфтами подшипников, в которых установлена вращающаяся гайка.
Известна конструкция преобразователя вращательного движения в поступательное - «Винтовой подъемник с вращающейся гайкой». Он содержит электродвигатель, корпус, шестерню, зубчатое колесо, шарикоподшипник радиальный, гайку, роликоподшипник радиально-упорный, винт, шарикоподшипник упорный. Винт выполнен в виде штока, имеющего резьбу на части его длины. Электродвигатель через шестерню и зубчатое колесо приводит во вращение гайку, установленную в подшипниках, вращение которой задает линейное перемещение винта - исполнительного органа механизма /4/.
Подобный винтовой механизм также не может быть использован в точных юстировочных механизмах, так как не обеспечивает требуемой точности и жесткости привода, особенно при знакопеременных нагрузках на вал. Осевые нагрузки в подобном механизме приходятся на вал, далее через вращающуюся гайку на подшипники, в которых она установлена и которые по определению не могут иметь высокой точности и жесткости при осевом нагружении, и потом на корпус. Применение упорных и (или) радиально-упорных подшипников для установки гайки несколько улучшает положение, но не решает его кардинально. Т.е. во всех перечисленных случаях винт, как исполнительный механизм, все равно будет иметь осевой и радиальный люфты, связанные в первую очередь с невозможностью обеспечения требуемой точности и жесткости подвижной, вращающейся гайки, что приведет к колебаниям, дерганью при включении и невысокой долговременной стабильности положения при отключении привода.
Решение /4/, как наиболее близкое по технической сущности, выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом изобретения является повышение точности, жесткости привода и долговременной стабильности положения во включенном или отключенном состояниях при сохранении простоты и технологичности конструкции.
Технический результат достигается тем, что в приводе линейного перемещения по п.1, содержащем электродвигатель, корпус, шестерню, зубчатое колесо, подшипники и гайку с винтом, выполненным в виде штока, имеющего резьбу на части его длины, новым является то, что гайка и подшипники скольжения жестко закреплены в корпусе, а шток установлен с возможностью как вращения, так и линейного перемещения, на штоке жестко закреплено зубчатое колесо, находящееся в зацеплении с блоком промежуточных шестерен, имеющих зубчатый венец увеличенной ширины.
В последующих реализациях привода электродвигателем служит шаговый электродвигатель, обеспечивающий требуемую минимальную величину перемещения штока; шестерни редуктора снабжены устройством выборки зазоров в зацеплении шестерен, позволяющим уменьшить мертвый ход привода; подшипники скольжения и/или гайка изготовлены из композитных или спеченных материалов. Кроме того, привод имеет концевые выключатели, ограничивающие перемещение штока в заданных пределах, и снабжен отсчетным устройством, позволяющим контролировать положение штока.
Жесткое закрепление гайки и подшипников скольжения в корпусе, а также жесткое закрепление зубчатого колеса на винте-штоке, позволяет исключить осевые и радиальные люфты, необходимые и обязательные для работы механизма с вращающейся гайкой, что в итоге повышает точность и жесткость привода.
В случае применения в резьбовой паре однозаходной самотормозящей резьбы, если гайка или шток не вращаются относительно друг друга, шток привода как угодно долго удерживается в любом промежуточном положении, в том числе под нагрузкой, при остановленном либо выключенном электродвигателе. Причем осевая жесткость винтового соединения, при отсутствии люфтов и зазоров в неподвижной, жестко закрепленной гайке, а следовательно, его долговременная стабильность - положение винта относительно гайки - чрезвычайно велика.
Конструкция привода линейных перемещений проста в изготовлении и технологична, не требует специального или прецизионного оборудования, дорогостоящей оснастки или материалов.
Применение винтового преобразователя вращения ротора электродвигателя в поступательное движение штока обеспечивает увеличение осевого усилия, поэтому для достижения больших усилий привода не требуется устанавливать электродвигатель высокой мощности или крупногабаритных редукторов с большим передаточным отношением. Так как привод сам является одновременно винтовым редуктором, основное редуцирование он берет на себя. Такое совмещение функций позволяет уменьшить число деталей привода, сделать узел более компактным. Мощность двигателя расходуется, в основном, на преодоление силы трения винтовой пары. Поэтому конструкцию пары трения ходовой винт - гайка и материалы нужно подбирать тщательно, с учетом износостойкости винтового соединения, возможности прирабатывания друг к другу и выборки зазоров, для максимального уменьшения мертвого хода механизма.
Не обнаружены технические решения, совокупность признаков которых совпадает с совокупностью признаков заявляемого привода линейных перемещений и обеспечивает получение вышеуказанного технического результата, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "изобретательский уровень".
На чертеже в сечении изображен предложенный привод линейных перемещений,
где
1 - корпус, 2 - двигатель (шаговый), 3 - шток, 4 - зубчатое колесо штока, 5 - гайка, 6 - подшипники скольжения, 7 - гайка регулировочная, 8 - промежуточный блок шестерен, 9 - подшипниковые опоры промежуточного блока шестерен, 10 - крышка подшипниковой опоры промежуточного блока, 11 - шестерня шагового двигателя, 12 - рукоятка ручного привода, 13 - колпачок защитный.
Заявляемый привод линейных перемещений содержит корпус 1, в котором расположен промежуточный блок шестерен 8, находящийся в зацеплении с шестерней 11 двигателя 2 и зубчатым колесом 4, жестко закрепленным на штоке 3, имеющем резьбу на части его длины и опорную сферическую поверхность, которой он воздействует на исполнительный механизм. Шток 3 установлен в гайке 5 и подшипниках скольжения 6 и при вращении перемещается в гайке 5 и подшипниках скольжения 6. Гайка 5 и подшипники скольжения 6 жестко закреплены в корпусе. Подшипники скольжения 6 выполнены в виде втулок, например, из спеченного бронзографита, пропитанного смазкой. Сечение штока 3 и зубчатого колеса 4 рассчитано таким образом, чтобы выдерживать эксплуатационные нагрузки с минимальными деформациями. Для выборки осевого и радиального зазоров в резьбовой паре, образованной штоком 3 и гайкой 5, имеется регулировочная гайка 7. Промежуточный блок шестерен 8 установлен на свои подшипниковые опоры 9, закрытые крышкой 10. Шестерня промежуточного блока 8 имеет зубчатый венец увеличенной ширины, размером больше рабочего хода привода, чтобы при линейном перемещении штока, возникающем при его вращении в гайке 5, шестерня штока не могла выйти из зацепления. Двигатель 2 имеет рукоятку 12 на выходном валу для возможности ручного перемещения штока 3, без включения электродвигателя 2. Полость корпуса 1, в которой перемещается шток 3, закрыта защитным колпачком 13.
Зубчатые колеса штока и промежуточного блока могут иметь устройства выборки зазоров в зацеплении, что позволит, при необходимости, существенно уменьшить мертвый ход привода.
Двигатель 2 может быть шаговым, тогда минимальное перемещение штока 3 привода определяется одним шагом двигателя 2, или обычным, работающим в режиме «старт-стоп». Тогда минимальное перемещение штока 3 задается временем работы двигателя и суммарным передаточным отношением привода, а положение штока может контролироваться специальным отсчетным механизмом, энкодером.
На приведенном чертеже шток 3 установлен на трех опорах, двух подшипниках скольжения 6 и гайке 5, которая при минимальных зазорах сама является опорой. Такая схема требует высокой точности изготовления опор привода, но является предпочтительной с точки зрения жесткости штока 3 в месте приложения рабочих нагрузок и суммарной точности привода. Установка штока 3 на гайке и одном подшипнике скольжения снизит требования к соосности опор, но приведет к увеличению базы между опорами и соответственно к снижению изгибной жесткости штока.
Заявляемый привод линейных перемещений работает следующим образом.
В исходном состоянии, при подаче напряжения на двигатель 2, шестерня 11 двигателя 2 приводит во вращение промежуточный блок шестерен 8, установленный в подшипниках 9, который в свою очередь передает вращение штоку 3 с помощью зубчатого колеса 4. Шток 3, поворачиваясь в гайке 5, получает линейное перемещение, вращается и двигается линейно в гайке 5 и подшипниках скольжения 6, воздействует на рабочий орган, например оправу или оптический стол. Зубчатое колесо штока 4, передавая крутящий момент от блока промежуточных шестерен 8 штоку, перемещается линейно, скользит рабочими поверхностями зубьев по шестерне промежуточного блока, имеющей для этого зубчатый венец увеличенной ширины. Рабочий контакт зубьев зубчатого колеса 4 с «длинной» шестерней промежуточного блока 8 происходит по винтовой линии, определяемой шагом резьбы штока. Вращение и линейное перемещение штока 3 продолжается до момента отключения двигателя 2 (или до упора зубчатого колеса 4 в стенки корпуса 1). Предельные положения штока (крайнее левое и крайнее правое положение) регулируются концевыми переключателями, которые на чертеже не показаны, так как могут входить в состав механизма, на который воздействует привод).
Корпус 1 привода объединяет все узлы и детали устройства в единое целое, защищает от внешних воздействий шестерни и подшипниковые опоры механизма, служит для герметизации и удержания смазки. Крышка 10 фиксирует подшипниковые опоры промежуточного блока 9 в гнездах корпуса, а также служит для герметизации внутреннего объема и удержания смазки, как и защитный колпачок 13.
При необходимости, для обеспечения возможности ручного перемещения штока 3 без включения электродвигателя, на выходном валу двигателя 2 имеется рукоятка ручного привода 12.
Регулировочная гайка 7 предназначена для компенсации износа в резьбовой паре - гайка 5 - шток 3 и уменьшения осевого и радиального зазоров в резьбе.
Заявляемый привод линейных перемещений обладает высокой точностью и жесткостью при сохранении простоты и технологичности конструкции и долговременной стабильностью положения рабочего вала исполнительного механизма - штока в включенном и отключенном состояниях. Шток, без каких-либо промежуточных элементов, с минимальными зазорами, определяемыми только резьбовой парой, передает и воспринимает усилия от рабочих механизмов, на которые производится воздействие. Зазоры при правильно выбранной конструкции резьбовой пары, ее приработке и регулировке минимальны. Если гайка или шток не вращаются относительно друг друга, шток привода длительно удерживается в любом промежуточном положении с высокой стабильностью, в том числе под нагрузкой, при остановленном или выключенном электродвигателе. Причем осевая жесткость винтового соединения и его долговременная стабильность (стабильность положения винта относительно гайки) чрезвычайно велика и не зависит от времени.
Жесткость подобного привода не зависит от жесткости подшипников и задается только осевой жесткостью и стабильностью винтовой пары.
На заявляемый привод линейных перемещений был разработан полный комплект конструкторской документации, изготовлена и испытана опытная партия. Проведенная экспериментальная проверка устройства показала достижение требуемых характеристик по точности и жесткости привода, подтвердила его работоспособность и надежность в работе.
Использование предложенного устройства позволяет повысить точность перемещений и разрешающую способность привода, увеличить точность и жесткость фиксации рабочего элемента после отключения, независимо от времени; упростить конструкцию, снизить себестоимость узла; уменьшить габариты и вес привода.
Благодаря своим преимуществам привод линейных перемещений найдет применение, например, в приводах точных линейных перемещений, в подвижных системах приборов, в частности, для юстировки оптических элементов, установленных в оправах.
Источники информации
1. RU №2100891 С1, кл. 6 Н02К 7/06, 41/02, опубл. 27.12.97.
2. RU №42085, кл. 7 F16К 31/04, F16Н 25/24, опубл. 20.11.2004 г.
3. «Механизмы». Справочник. Стр.138-140, рис.2.257. Изд. 4-е. Под ред. С.Н.Кожевникова. М., «Машиностроение», 1976 г.
4. «Проектирование механических передач». Учебно-справочное пособие. Стр.137-140, рис.6.4. Изд. 4-е. С.А.Чернавский, Г.М.Ицкович, В.А.Киселев и др. М., «Машиностроение», 1976 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Линейный электропривод | 2019 |
|
RU2735979C1 |
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| МОБИЛЬНОЕ ТОКАРНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТОРЦОВ КРУПНОГАБАРИТНЫХ ОБЕЧАЕК | 2001 |
|
RU2200075C2 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Шариковая винто-реечная передача | 1985 |
|
SU1270465A1 |
| УСТРОЙСТВО ДЛЯ ВЫРЕЗАНИЯ ОТВЕРСТИЯ В ДЕЙСТВУЮЩЕМ ТРУБОПРОВОДЕ | 2008 |
|
RU2380199C1 |
| Радиально-ковочная машина | 1983 |
|
SU1123158A1 |
Изобретение относится к электромеханическим линейным исполнительным механизмам и может быть использовано в приводах точных линейных перемещений, в подвижных системах приборов, в частности, для юстировки оптических элементов, установленных в оправах. Привод содержит электродвигатель, корпус, шестерню, зубчатое колесо, подшипники и гайку с винтом, выполненным в виде штока, имеющего резьбу на части его длины. Подшипники скольжения жестко закреплены в корпусе, а шток установлен с возможностью как вращения, так и линейного перемещения. На штоке жестко закреплено зубчатое колесо, находящееся в зацеплении с блоком промежуточных шестерен, имеющих зубчатый венец увеличенной ширины. Гайка жестко закреплена в корпусе и снабжена устройством выборки осевого и радиального зазоров в резьбовой паре. Достигается повышение точности, жесткости привода и долговременной стабильности положения во включенном или отключенном состояниях при сохранении простоты и технологичности конструкции. 3 з.п. ф-лы, 1 ил.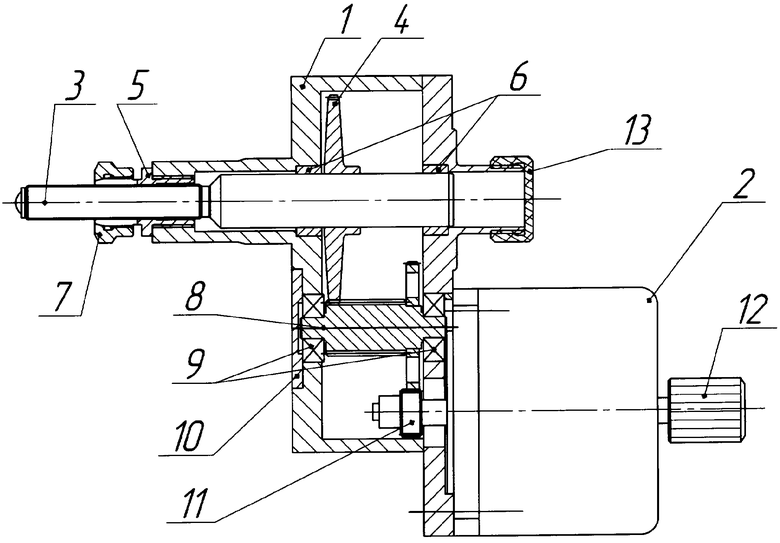
| GB 856160 А, 14.12.1960 | |||
| KR 20040056847 А, 01.07.2004 | |||
| JP 11082458 А, 26.03.1999 | |||
| JP 2001086699 А, 30.03.2001 | |||
| Клупп | 1930 |
|
SU33795A1 |

