Изобретение относится к черной металлургии и может быть использовано в устройствах управления электроприводом доменного производства.
Известно устройство управления подъемно-транспортной установкой, содержащее центробежный таходатчик, преобразователь механических сигналов в электрические, электромагнитную муфту, ведущая часть которой связана с валом машины, обмотка возбуждения связана с задатчиком скорости, ведомая часть с валом таходатчика (авт.св. СССР N 353897, B 66 B 1/24, 1972 г.)
Недостатком устройства является низкая точность регулирования и недостаточная надежность.
Известно устройство управления электроприводом скиповой лебедки доменной печи, содержащее датчик тока, включенный в якорную цепь приводного электродвигателя постоянного тока, датчик частоты вращения электродвигателя, блок формирования команд управления, один из входов которого соединен с выходом блока путевых кулачковых выключателей, другой вход с панелью управления загрузочного органа, один из выходов с пускателем электродвигателя, а другой выход с управляющим входом рабочего тормоза.
Недостатком известного устройства управления является повышенная опасность для обслуживающего персонала из-за наличия ртути в центробежном выключателе, а также низкая надежность из-за отсутствия учета веса загружаемой шихты при перегрузке электродвигателя.
Целью изобретения является обеспечение экологической безопасности устройства и повышение надежности его работы.
Для этого устройство автоматического управления электроприводом скиповой доменной печи, содержащее датчик тока, включенный в якорную цепь приводного электродвигателя постоянного тока, датчик частоты вращения электродвигателя, блок формирования команд управления, один из входов которого соединен с выходом блока путевых кулачковых выключателей, другой вход с панелью управления загрузочного органа, один из выходов с пускателем электродвигателя, а другой выход с управляющим входом рабочего тормоза, снабжено вычислительным блоком и генератором прямоугольных импульсов, а датчик частоты вращения выполнен бесконтактным с возможностью формирования двух сдвинутых по фазе прямоугольных импульсов, причем входы вычислительного блока подключены к выходам генератора прямоугольных импульсов, датчика частоты вращения, датчика тока, а также выходам блока формирования команд управления, соответствующим командам на подъем и спуск скипов, сигналам о тяжелом и легком материале шихты, сигнальные выходы вычислительного блока, соответствующие заданным скоростям лебедки, противоходу скипов, неисправности рабочего тормоза и перегрузке электродвигателя, соединены с отдельными входами блока формирования команд управления, а выход последнего, соответствующий команде на включение аварийной сигнализации, подключен ко входу блока сигнализации.
На чертеже представлена схема предлагаемого устройства для управления электроприводом скиповой лебедки доменной печи.
Устройство для управления электроприводом скиповой лебедки доменной печи содержит бесконтактный импульсный датчик 1 в качестве датчика частоты вращения, соединенный через муфту 2 с электродвигателем 3 постоянного тока, связанный через понижающий редуктор 4 с барабаном 5 лебедки, датчик 6 тока, вычислительный блок 7, третий вход которого соединен с генератором 8 прямоугольных импульсов, выдающий сигналы стабильной частоты, блок 9 путевых кулачковых выключателей, соединенных через понижающий редуктор 10 с барабаном 5 лебедки, блок 11 формирования команд управления, соединенный с вычислительным блоком 7. Первый выход блока 11 формирования команд управления соединен с датчиком 6 тока, а второй с рабочим тормозом 12. Седьмой вход блока 11 формирования команд управления соединен с контактами путевых кулачковых выключателей 9, а восьмой вход с панелью управления загрузочного устройства (на чертеже не показана).
Первый вход вычислительного блока 7 соединен с бесконтактным импульсным датчиком 1, второй вход с датчиком тока 6, третий с генератором 8 прямоугольных импульсов, четвертый и пятый входы с третьим и четвертым выходом блока 11 формирования команд управления, шестой и седьмой входы, подающие сигналы движения скипа "вверх" и "вниз" с пятым и шестым выходами блока 11 формирования команд управления электроприводом, первый, второй и третий выходы вычислительного блока 7, подающие сигналы о значении скорости скипа (например, 20% 50% и 115% цифры соответствуют только конкретному примеру), выходы четвертый и пятый, подающие сигналы противохода скипа (ПХ) и неисправности рабочего тормоза (НТ), выход шестой, подающий сигнал о перегрузке электродвигателя (ПД) с учетом засыпаемого в скип материала (тяжелый груз, легкий груз) соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами блока 11 формирования команд управления электродвигателем 3 постоянного тока скипового подъемника, состоящего из правого 13 и левого 14 скипов, тросов 15 и 16, на которых подвешены скипы, катящиеся по направляющим 17 и 18 скипов 13 и 14.
Когда правый скип 13 находится в скиповой яме 19 под погрузкой, другой скип левый 14 в это время находится на колошнике 20 в опрокинутом положении. В это время электродвигатель 3 постоянного тока зафиксирован с помощью рабочего тормоза 12.
При вращении барабана 5 лебедки один трос, например, 15 наматывается на барабан 5, а другой трос 16 сматывается. Таким образом, одновременно один скип поднимается на колошник 20, а другой спускается в скиповую яму 19.
Бесконтактный импульсный датчик 1 вращается с той же скоростью, что и электродвигатель 3 постоянного тока.
При вращении барабана 5 лебедки бесконтактный импульсный датчик 1 выдает прямоугольные импульсы, длительность периода которых находится в обратной зависимости от частоты вращения электродвигателя 3 постоянного тока. Чем выше частота вращения, тем короче по времени период.
Датчик 6 тока включен в якорную цепь электродвигателя 3 постоянного тока и выдает аналоговый сигнал о величине тока якоря.
Вычислительный блок 7 выполняет следующие функции:
вычисляет частоту вращения барабана и сравнивает текущее значение скорости с несколькими наперед заданными величинами 20% 50% и 115% номинальной скорости лебедки и при достижении этих значений выдает управляющие сигналы в блок управления электроприводом скиповой лебедки;
контролирует противоход скипов;
контролирует неисправность механических тормозов во время стоянки;
контролирует нагрузку по току якоря электродвигателя.
Генератор 8 прямоугольных импульсов подает прямоугольные импульсы на третий вход вычислительного блока, которые используются для определения частоты вращения барабана лебедки.
Контроль скорости лебедки производится в вычислительном блоке 7 путем сравнения значений периода сигнала, поступающего с бесконтактного импульсного датчика 1 на первый вход вычислительного блока 7, и величин периодов, заранее подсчитанных для скоростей 20% 50% и 115% от номинальной.
Величина периода соответствует числу импульсов, поступивших на третий вход вычислительного блока 7 от генератора 8 прямоугольных импульсов и подсчитанных за период от переднего фронта одного импульса бесконтактного импульсного датчика 1 до переднего фронта следующего импульса. Частота импульсов генератора 8 прямоугольных импульсов выбирается в десятки тысяч раз выше, чем максимальная частота импульсов от датчика 1, например 300 кГц и 168 Гц.
При достижении действительной скорости уровня заданных величин вычислительный блок 7 выдает сигналы с первого, второго и третьего выхода на первый, второй и третий входы блока 11 формирования команд управления электроприводом лебедки, когда на седьмой вход подаются также сигналы с блока 9 путевых кулачковых выключателей для подтверждения нормальной работы электропривода на определенных участках пути. При достижении скорости, равной 115% от номинальной скорости, блок 11 формирования команд управления со второго выхода выдает сигнал на включение рабочих тормозов 12.
В качестве блока 11 формирования команд управления может быть использован блок, описанный в книге Левитанского Б.А. Электрооборудование предприятий черной металлургии. М. Металлургиздат, 1995, с. 209-213, а в качестве вычислительного блока 7 программируемый микроконтроллер (Универсальный программируемый микроконтроллер "ЭЛКО", ТОО ЭЛКО). В качестве бесконтактного импульсного датчика 1 может быть использован фотоэлектрический датчик (Тун А. Я. Системы контроля скорости электропривода. М. Энергоатомиздат, 1984, с. 147-160) или (Гендельман Б.Р. и др. Датчики в системах автоматического регулирования электроприборов. Промышленная энергетика, 1986, N 9, с. 17), или импульсный датчик, работающий на срыве генерации (Филиппов В.Г. Цифраторы перемещений. М. Военное издательство министерства обороны СССР, 1965, с. 78), в качестве датчика 6 тока датчик, описанный в упомянутой статье Гендельмана Б.Р. и др. на с. 17, а в качестве генератора 8 прямоугольных импульсов генератор, описанный в книге Горошкова Б.И. Радиоэлектронные устройства. М. Радио и связь, 1985, с. 252-253; фиг. 10, 26а.
Устройство работает следующим образом.
При включении пускателем (на чертеже не показан) электродвигателя 3 постоянного тока его вращение передается через понижающий редуктор 4 барабану 5 скиповой лебедки и далее через редуктор 10 на блок 9 путевых кулачковых выключателей, выдающий сигналы на седьмой вход блока 11 формирования команд управления скиповой лебедки о положении скипов на всем пути их следования.
Контроль противохода (ПК) скипов осуществляется следующим образом.
При вращении электродвигателя 3 постоянного тока одновременно вращается бесконтактный импульсный датчик 1, выдающий две серии прямоугольных импульсов, сдвинутых по фазе, на первый вход вычислительного блока 7.
Если поступает команда с пятого выхода управляющего блока 11 на шестой вход вычислительного блока 7 на подъем скипа 13 "вверх", то после начала движения импульсы первой серии бесконтактного импульсного датчика 1 опережают по фазе импульсы второй серии. И наоборот, при движении "вниз" импульсы второй серии опережают импульсы первой серии.
В случае несовпадения направлений заданного и фактического движения (противоход) вычислительный блок 7 выдает управляющий сигнал ПХ с четвертого выхода на четвертый вход блока 11 формирования команд управления, который в свою очередь со второго выхода выдает сигнал на включение рабочего тормоза 12, тем самым предотвращая аварию.
При достижении действительной скорости уровня заданных величин вычислительный блок 7 выдает сигналы с первого, второго и третьего выходов на первый, второй и третий входы блока 11 формирования команд управления, куда на вход 7 подаются также сигналы блока 9 путевых кулачковых выключателей для подтверждения нормальной работы электропривода на определенных участках пути. При достижении 115% от номинальной скорости блок 11 формирования команд управления со второго выхода выдает аварийный сигнал на включение рабочего тормоза 12.
Сигнал о неисправности (НТ) рабочего тормоза 12 формируется в том случае, когда в вычислительный блок 7 не поступает команда на перемещение "вверх" и "вниз", рабочий тормоз 12 включен, а бесконтактный импульсный датчик 1 продолжает выдавать две серии импульсов, которые поступают на первый вход вычислительного блока 7.
Вычислительный блок 7 с пятого выхода выдает сигнал о неисправности рабочего тормоза 12 на пятый вход блока 11 формирования команд управления, который через 7 выход выдает сигнал на включение световой и звуковой сигнализации (на чертеже не показаны).
Управление электроприводом скиповой лебедки осуществляется с учетом вида загруженной шихты (тяжелый груз, легкий груз), информация о которой поступает с панели управления загрузочного органа (не показано) на восьмой вход блока 11 формирования команд управления и далее с третьего и четвертого выходов на четвертый и пятый входы вычислительного блока 7.
Информация о нагрузке поступает на второй вход вычислительного блока 7 от датчика 6 тока, включенного в якорную цепь электродвигателя 3 постоянного тока.
Если ток якоря по своей величине превысит допустимый предел, соответствующий поднимаемому грузу, то с шестого выхода вычислительного блока 7 выдается управляющий сигнал ПД о перегрузке двигателя на шестой вход блока 11 формирования команд управления, который со второго выхода выдает сигнал на включение рабочего тормоза 12.
Использование: доменное производство. Сущность: в устройство для управления электроприводом с блоком формирования команд управления, блоком путевых кулачковых датчиков, датчиком частоты вращения и датчиком тока введены вычислительный блок и генератор прямоугольных импульсов, а датчик частоты вращения выполнен бесконтактным. Вычислительный блок определяет частоту вращения барабана, сравнивает текущее значение скорости с несколькими наперед заданными величинами и при достижении этих значений выдает управляющие сигналы в блок формирования команд управления. Кроме того, в вычислительном блоке осуществляется контроль противохода скипов, неисправности механических тормозов, нагрузки по току якоря злектродвигателя. Если ток превышает допустимый предел, вырабатывается команда на включение рабочего тормоза. 1 ил.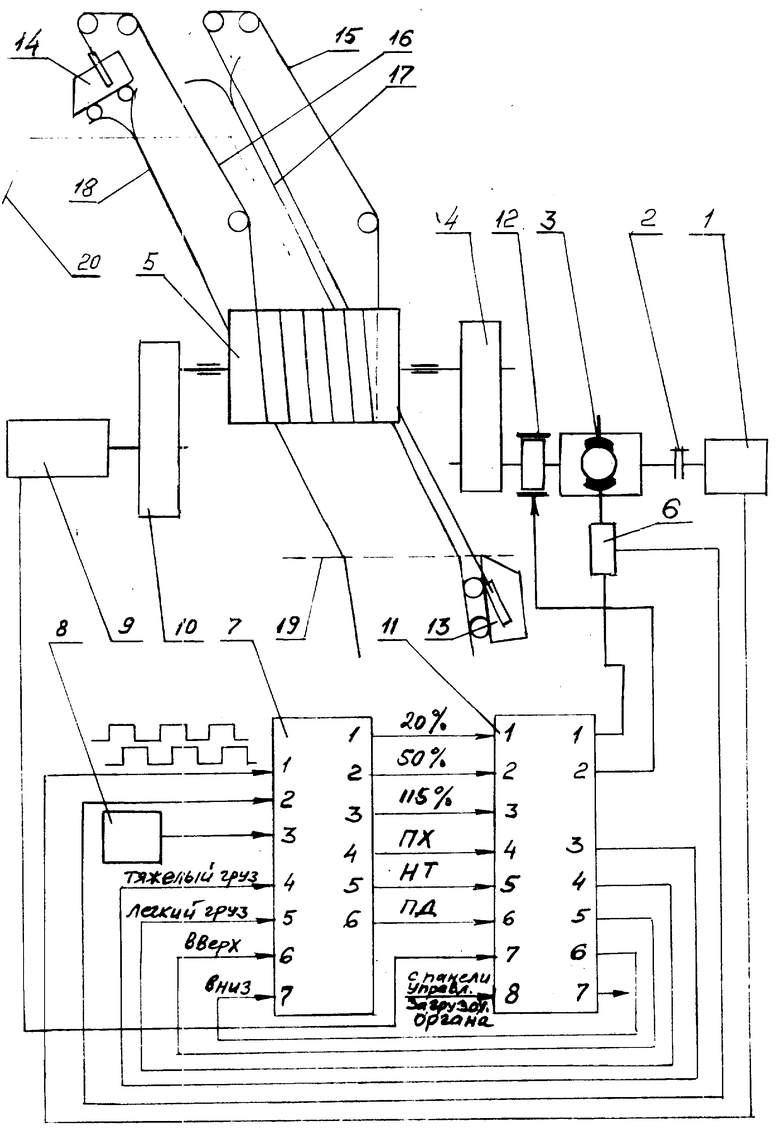
Устройство для управления электроприводом скиповой лебедки доменной печи, содержащее датчик тока, включенный в якорную цепь приводного электродвигателя постоянного тока, датчик частоты вращения электродвигателя, блок формирования команд управления, один из входов которого соединен с выходом блока путевых кулачковых выключателей, другой вход с панелью управления загрузочного органа, один из выходов с пускателем электродвигателя, а другой выход с управляющим входом рабочего тормоза, отличающееся тем, что оно снабжено вычислительным блоком и генератором прямоугольных импульсов, а датчик частоты вращения выполнен бесконтактным с возможностью формирования двух сдвинутых по фазе прямоугольных импульсов, причем входы вычислительного блока подключены к выходам генератора прямоугольных импульсов, датчика частоты вращения, датчика тока, а также выходам блока формирования команд управления, соответствующим командам на подъем и спуск скипов, сигналам о тяжелом и легком материале шихты, сигнальные выходы вычислительного блока, соответствующие заданным скоростям лебедки, противоходу скипов, неисправности рабочего тормоза и перегрузке электродвигателя, соединены с отдельными входами блока формирования команд управления, а выход последнего, соответствующий команде на включение аварийной сигнализации, подключен к входу блока сигнализации.
| Афанасьев В.Д | |||
| и др | |||
| Электрооборудование предприятий черной металлургии | |||
| - М.: Государственное научно-техническое издание по черной и цветной металлургии, 1963, с | |||
| Газогенератор для дров, торфа и кизяка | 1921 |
|
SU376A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
