Данное техническое решение относится к устройствам управления машинами, в частности к устройствам управления электроприводами машин.
Техническое решение предназначено для использования преимущественно в конструкциях таких подъемно-транспортных машин, особенностью которых является удаленность кабины управления от электродвигателей исполнительных органов.
Техническое решение предназначено для использования в устройствах управления машинами с ручным приводом управления, имеющим один или несколько управляющих элементов, которые взаимодействуют селективно или одновременно с несколькими управляемыми элементами, причем управляющие элементы могут совершать различные независимые перемещения, каждое из которых соответствует приведению в действие только одного или группы управляемых элементов. Существенной отличительной особенностью таких устройств является то, что управляющие элементы или один управляющий элемент перемещаются вручную относительно ортогональных осей и выполнены с возможностью возврата в нейтральное положение.
Принципиальные схемы отдельных компонентов настоящего технического решения могут быть также использованы в конструкциях машин с устройствами управления, расположенными в кабинах управления, оснащенных пультами для управления исполнительными механизмами и приводом перемещения самой кабины. К таким машинам относятся подъемно-транспортные машины с перемещаемой кабиной, а также подъемники, лифты, шахтные клети и им подобные машины.
Устройство управления электроприводом в значительной мере касается систем управления, включающих средства для кодирования и декодирования (шифровки и расшифровки) сигналов управления с целью минимизации размеров компонентов устройства, упрощения передачи сигналов к исполнительным органам, повышения надежности управления и конструкции устройства.
В значительной мере устройство управления электроприводом машины касается также устройств для преобразования дискретной информации в код; оно касается, например, коммутационных средств для генерирования цифровых кодов команд, а также устройств для преобразования положения чувствительного элемента в код в сочетании с другими устройствами, устройств для ввода и вывода цифровых данных с использованием органа управления машиной, с использованием устройств для кодирования и декодирования сигналов.
Изобретение касается также систем управления электроприводом подъемных средств, оснащенных переключателями с угловым перемещением органов управления, приводимых в действие рукой оператора, при этом органы управления могут поворачиваться только на определенный угол, а также с угловым перемещением в нескольких плоскостях.
В более значительной мере изобретение касается систем управления электроприводами машин, включающих средства шифровки или кодирования сигналов, передачи их на расстояние удаления механизма электропривода от органов управления, например на расстояние удаления кабины машиниста башенного крана от механизмов перемещения крана по рельсовому пути и от других механизмов. Такие системы управления включают средства расшифровки сигналов и средства включения электродвигателей, при этом существенной решаемой задачей при проектировании таких систем является задача передачи сигналов по электрическим проводам.
В практике широко известны устройства управления электроприводами машин, в частности грузоподъемными кранами, при этом известные устройства включают электрические контактные аппараты для коммутации тока в электрических цепях и изменения за счет этого параметров тока и напряжения в обмотках электродвигателей привода машины, причем в известных устройствах используются аппараты ручного и электромагнитного включений, индукционные, тепловые, электромагнитные, контактно-механические, а также электроприводы с тиристорными преобразователями [1].
Используемые, например, в конструкциях систем управления башенными кранами, кабины управления которых находятся на расстоянии приблизительно около 100 м от наиболее удаленных от кабины электродвигателей, известные устройства управления требуют применения электрических кабелей большого диаметра, причем сами по себе эти устройства, включающие средства автоматического регулирования с тиристорными преобразователями, не отвечают современным требованиям, предъявляемым в настоящее время к электроприводам машин.
С целью устранения упомянутых недостатков в современных конструкциях устройств для управления электроприводами машин (включая дистанционное управление) применяются устройства для преобразования перемещений органов управления в сигналы управления и передачи этих сигналов в зашифрованном или кодированном виде на исполнительные элементы электропривода, находящегося на значительном удалении от места, откуда ведется управление этим электроприводом.
В известном устройстве для таких целей используются органы управления в виде переключателей, в частности в виде рукояток управления, связанных с поводками, имеющими контактные элементы, преобразующие угловые перемещения рукоятки в сигналы управления, при этом рукоятка связана подвижно с дугообразным рычагом с подпружиненными контактами на концах, причем на корпусе переключателя закреплены печатные платы с контактными дорожками со стороны поводков, взаимодействующими с подпружиненными контактами [2].
Этот переключатель используется, например, в устройствах радиоуправления грузоподъемными кранами, включающими пульт управления для преобразования перемещений органа управления в сигналы управления, приемно-исполнительный и коммутационный блоки, включающие электромагнитные пускатели, осуществляющие включение удаленных от пульта управления электродвигателей механизмов крана, их реверс и коммутацию пускорегулирующих сопротивлений, при этом для кранов с подвижной кабиной применение известного переключателя позволяет сократить большое количество троллей или гибких токопроводов цепей управления, поскольку передача сигналов управления ведется посредством двухжильного кабеля небольшого сечения, по которому с помощью электронных блоков управления передаются команды из подвижной кабины на электропривод крана [3].
Недостатком этого известного технического решения является то, что при интенсивной эксплуатации переключателя большому износу подвержена контактная система, что приводит к уменьшению срока службы переключателя, а также к снижению надежности управления машиной.
Наиболее близким техническим решением к данному изобретению по сущности и достигаемому эффекту является устройство управления электроприводом машины, включающее блоки управления с органами управления, модули управления, выполненные с управляющими элементами, соединенными с блоками шифраторов, блок реле, соединенный с блоком реле аппаратуры электропривода [4].
В этом устройстве каждый шифратор или ротационное кодирующее устройство связано с электродвигателем привода машины, управляющий блок или блок управления выполнен с запрограммированной частотой, которая соответствует частоте вращения нескольких, по крайней мере более двух, электродвигателей, входящих в состав электропривода машины. Устройство управления включает кодирующее устройство общей системы управления, управляющее устройство исполнительными блоками, блок приводных устройств электродвигателей, линию связи, пульт управления, счетчик сигналов частоты вращения вала электродвигателя, при этом счетчик сигналов связан с генератором частоты.
Устройство предназначено для обеспечения синхронной или согласованной работы электродвигателей и по своим функциям имеет ограниченные возможности его применения.
Решаемой и достигаемой технической задачей настоящего изобретения является расширение функциональных возможностей устройства, повышение надежности управления и срока службы устройства.
Поставленная техническая задача решается тем, что в устройство управления электроприводом машины, включающем блоки управления с органами управления, модули управления, выполненные с управляющими элементами, соединенными с блоками дешифраторов, блок реле, соединенный с блоком реле аппаратуры электропривода, введен разъем, дешифратор соединен с блоком реле и объединен с ним в блок сопряжения, который соединен с блоками шифраторов разъемом, при этом блоки и модули управления объединены колонками управления, образующими пульт управления электроприводом машины, каждый блок шифратора включает по крайней мере один ряд последовательно расположенных датчиков положения органа управления, каждый орган управления выполнен с постоянным магнитом, имеющим возможность его взаимодействия с упомянутыми датчиками, постоянный магнит выполнен с магнитопроводящей П-образной скобой, при этом в нейтральном положении рабочего органа постоянный магнит расположен над центральным датчиком упомянутого ряда датчиков, а торцы магнитопроводящей П-образной скобы расположены над датчиками, которые расположены по обеим сторонам от центрального датчика.
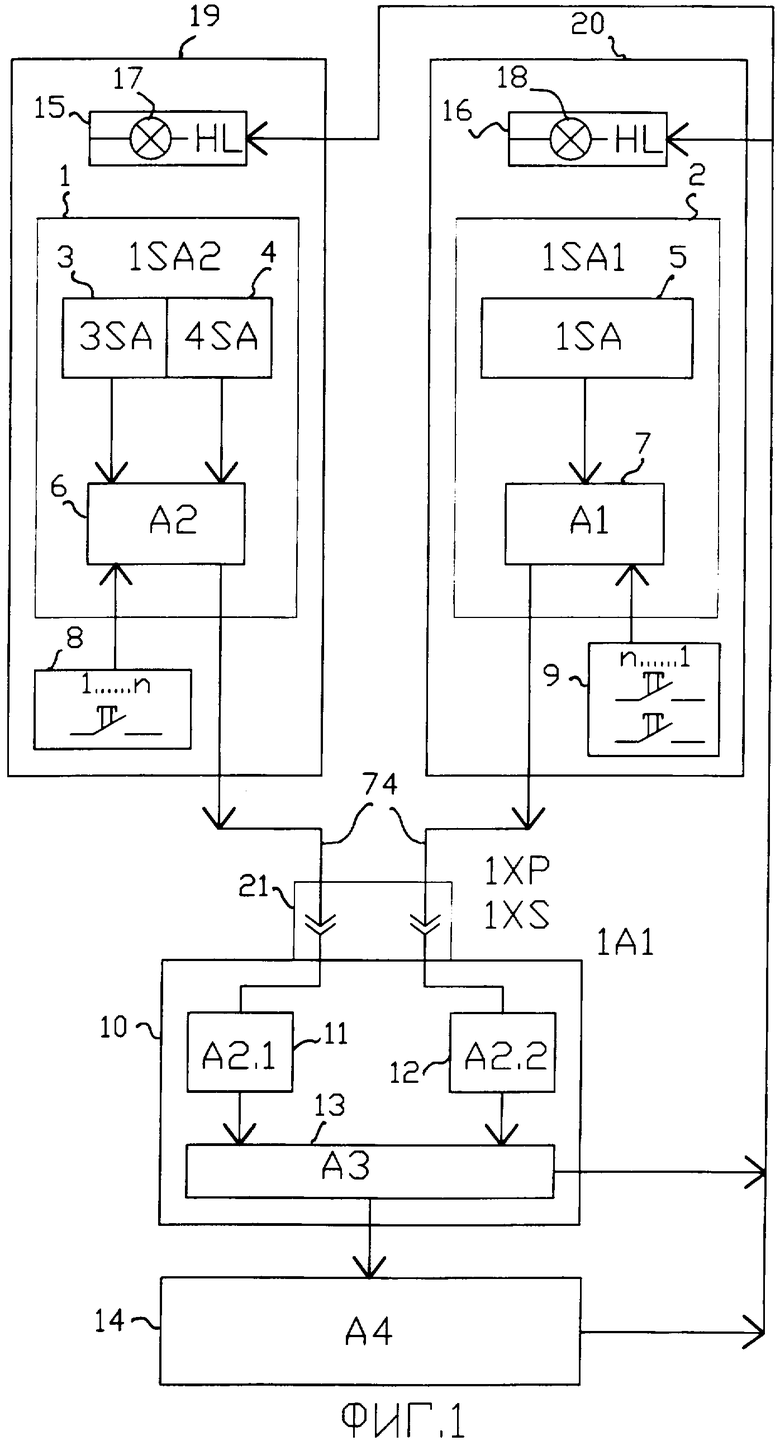
На фиг.1 показана структурная схема устройства управления электроприводом машины на примере использования этого устройства в конструкции башенного крана,
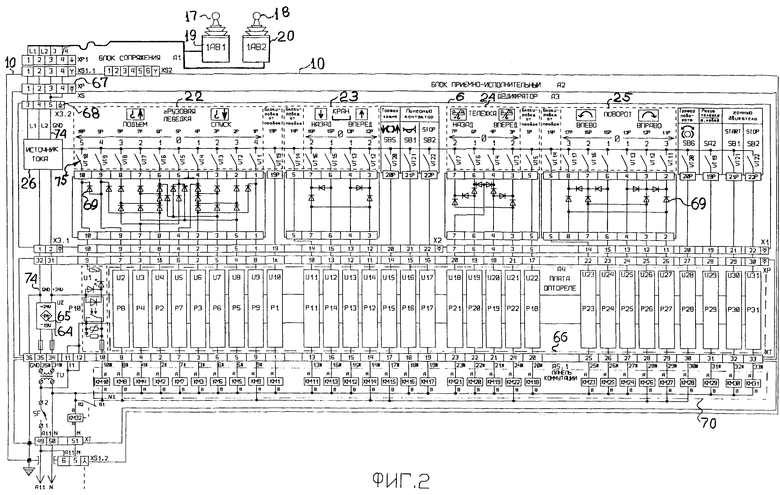
на фиг.2 - электрическая схема устройства управления,
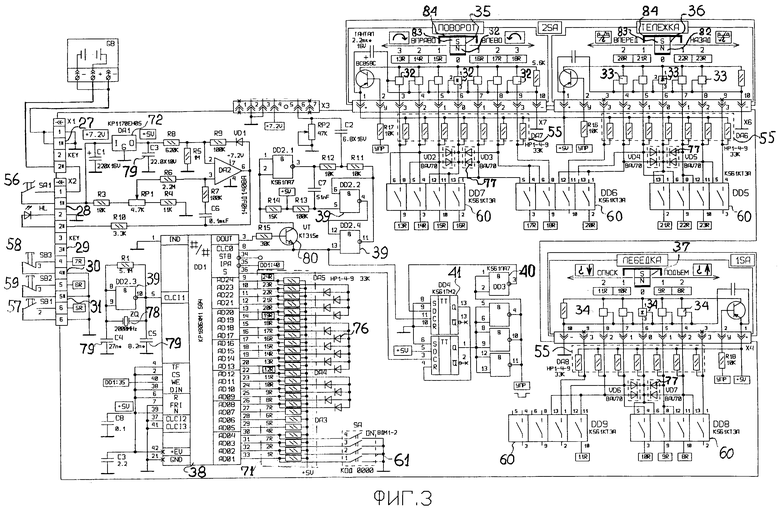
на фиг.3 - электрическая схема шифратора устройства управления,
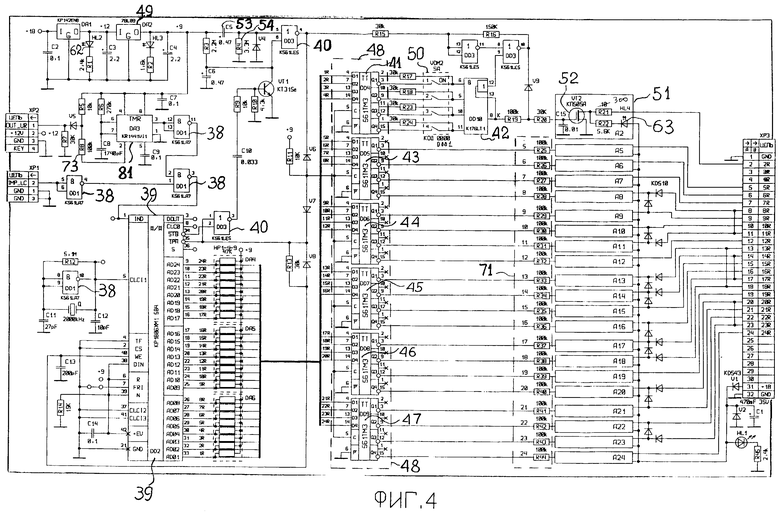
на фиг.4 - электрическая схема дешифратора устройства управления,
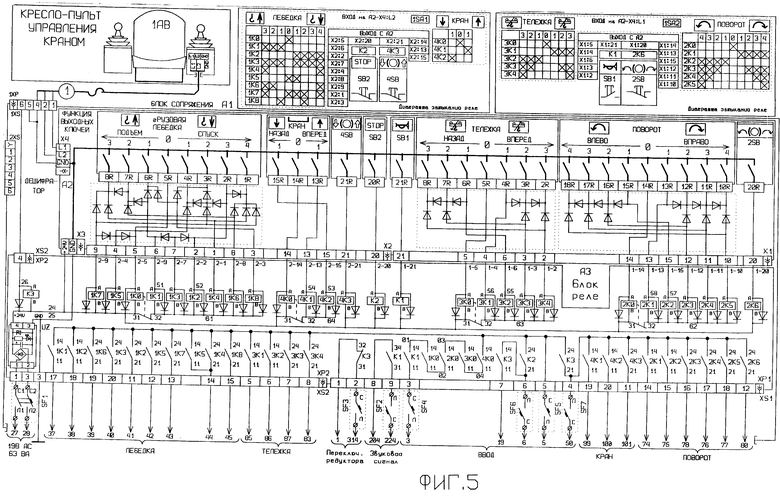
на фиг.5 - принципиальная электрическая схема устройства управления,
на фиг.6 - диаграмма тактового опорного сигнала в системе кодировки передаваемых сигналов управления,
на фиг.7 - диаграмма модулирующего сигнала на входе модулятора передатчика и на выходе приемника устройства,
на фиг.8 - диаграмма цифрового сигнала на входе дешифратора устройства.
На прилагаемых к описанию изобретения фигурах чертежей графической части кроме общепринятых цифровых позиций, указывающих на части и элементы устройства, взаимное расположение и связи между ними, эти части устройства и элементы для удобства чтения показаны также буквенно-цифровыми индексами в соответствии с общепринятыми обозначениями. На графической части описания позиции обозначены волнистыми линиями.
Устройство включает модули управления 1 и 2 (фиг.1) с командоаппаратами 3, 4 и 5, которые соединены с блоками 6 и 7 шифраторов, при этом эти блоки соединены с вынесенными за пределы модулей управления кнопками управления 8 и 9.
Блоки 6 и 7 шифраторов соединены с блоком сопряжения 10, включающем блоки 11 и 12 дешифраторов, которые соединены с блоком 13 реле и блоком 14 реле аппаратуры электропривода машины. Блоки 13 и 14 реле соединены с блоками 15 и 16 управления, включающими ручные органы управления 17 и 18, при этом блоки 15 и 16 и модули 1 и 2 управления объединены в конкретно рассматриваемом примере реализации изобретения колонками управления 19 и 20, выполненными в виде несущих металлоконструкций коробчатой формы. Блок сопряжения 10 соединен с блоками 6 и 7 шифраторов электрическими шестиконтактными разъемами 21.
Колонки управления 19 и 20 предназначены для использования преимущественно в конструкциях подъемно-транспортных машин. Связанные с креслом машиниста (не показано) колонки управления преобразуют его в кресло-пульт управления машиной, а в случаях соединения колонок между собой, когда кресло машиниста не используется, колонки управления могут представлять собой стационарный или передвижной минипульт управления, который может быть использован в устройствах управления электроприводами машин широкой номенклатуры.
В данном описании изобретение реализовано на примере его реализации в устройстве управления электроприводом башенного крана, имеющего электродвигатели привода грузовой лебедки 22 (фиг.2), механизма 23 передвижения башенного крана по рельсовому пути, механизма 24 перемещения грузовой тележки вдоль стрелы, механизма 25 поворота поворотной части крана вокруг его вертикальной оси, а также другие электродвигатели. Электродвигатели названных механизмов в конкретно рассматриваемом примере исполнения данного устройства соединены с источником тока 26.
Модуль управления 1 (фиг.1) включает командоаппараты 3 и 4, модуль управления 2 включает командоаппарат 5. В совокупности с блоками 6 и 7 шифраторов командоаппараты 3, 4 и 5 выполняют функции бесконтактных переключателей. Модули управления 1 и 2 включают цифровые микросхемы-датчики 27-34 (фиг.3), которые расположены по дуге, и над ними установлены с возможностью перемещения постоянные магниты 35, 36, 37, связанные с ручными органами управления 17 и 18. При перемещении органов управления из нерабочего положения “0” в заданном направлении в рабочее положение упомянутые постоянные магниты взаимодействуют с соответствующими датчиками 32, 33 и 34.
Каждый блок 11 или 12 дешифратора (фиг.1) представляет собой приемную часть, которая обеспечивает ввод шифрограммы с канала связи, ее дешифрацию, контроль, хранение в буферном регистре на время приема, а также обеспечивает выдачу дискретных сигналов через транзисторные ключи для управления исполнительными реле, которые управляют работой электродвигателей упомянутых механизмов.
На фиг.3 показаны микросхемы 38-41 (DD1-DD4) и микросхема 42 (DD10 - фиг.4). Микросхема 38 выполняет функцию шифратора или кодера, микросхема 39 формирует двухполярный сигнал для модулятора передатчика, микросхема 40 обеспечивает импульсное питание бесконтактного переключателя и выполняет функцию сравнения шифров, а микросхема 41 (DD4 - фиг.4) и микросхема 42 в совокупности с микросхемами 43-47 (DD5-DD9) представляет собой буферный регистр 48, входящий в состав платы дешифратора. Последняя, кроме названных элементов, включает источник питания 49 (DA2) для питания микросхем и переключатель 50 (SA), положение которого соответствует коду шифратора. В плату дешифратора (фиг.4) входят также кодовый ключ 51 (А2), средства защиты 52 (VT1), элементы 53 (С5), 54 (R4), служащие для блокировки шифровального выхода или выхода шифратора в момент подачи питающего напряжения на время 2-2,5 сек. При этом микросхема 42 (DD10), выполняя функцию сравнения шифров при положительном результате, когда шифры совпадают, включает кодовый ключ 51 (А2). На фиг.3 показаны также блоки 55 набора резисторов аналоговых микросхем, включенные между выходами датчиков 32, 33 и 34 и входами элементов коммутаторов.
На лицевой верхней поверхности левой колонки управления 19 (фиг.1 и 2) расположены орган управления 17 механизмами передвижения грузовой тележки вдоль стрелы крана и поворота поворотной части крана, кнопки 56, 57 и 58 (фиг.3) включения соответственно линейного контактора, звукового сигнала и тормоза поворота, индикаторы и другие элементы управления. Внутри колонки управления 19 установлена печатная плата блока 6 шифратора, обеспечивающая формирование командных сигналов органами управления этой колонки, включая орган управления 17.
На правой колонке управления 20 (фиг.2) установлены орган управления 18 для управления механизмами передвижения крана и грузовой лебедки, кнопка 56 отключения линейного контактора и кнопка 59 аварийного выключения крана, переключатель передачи редуктора механизма грузовой лебедки и индикаторы.
Внутри этой колонки управления установлена печатная плата блока 7 шифратора (фиг.1), обеспечивающая формирование командных сигналов органами управления правой колонки управления 20, включая орган управления 18. Блок сопряжения 10 (фиг.1), в который входят блоки 11 и 12 дешифраторов, соединен с блоком 6 шифратора левой колонки управления 19 и с блоком 7 шифратора правой колонки управления 20.
Устройство включает коммутаторы 60, соединенные с блоками 55 набора транзисторов (фиг.3), переключатель 61, который может содержать до восьми разрядов. На каждом дешифраторе установлены светодиоды 62 и 63 (фиг.4), контролирующие поступление питания на плату дешифратора, включение канала связи, прохождение команд управления механизмами крана. Дешифраторы получают питание от выпрямителя 64 (UZ) (фиг.2), установленного на плате блока реле. На плате выпрямителя 64 установлен предохранитель (3,15А) и светодиод 65, контролирующий при подаче питания исправную работу выпрямителя 64.
Блок 66 исполнительных реле (фиг.2) состоит из реле напряжением питания катушек 24В постоянного тока. Выходные контакты исполнительных реле включены в общую схему устройства. Через разъемы 67 и 68 (верхняя левая часть фиг.2) приемно-исполнительный блок и дешифратор соединены с блоком сопряжения 10, который соединен с колонками управления 19 и 20 электрическими проводами, объединенными в кабель.
Устройство включает также диоды 69 (V9), выполняющие функции формирования диаграмм включения механизмов, электромагнитные пускатели 70 (КМ), блок 71 резисторов (R - фиг.3 и 4), аналоговые микросхемы 72 (DA, DA1) стабилизации напряжения, резисторы 73 (R8 - фиг.4), образующие согласующее устройство линий и формирователь сигналов, канал электрической связи или вышеупомянутый электрический кабель 74 (фиг.1, 2), выходные ключи 75 (VT -фиг.2), диоды 76 (фиг.3) блокировки сигнала, диоды 77, обеспечивающие блокировку включения последующих состояний бесконтактного переключателя относительно предыдущих его состояний.
Устройство включает обеспечивающий работу тактового генератора кварцевый резонатор 78 (Q), конденсаторы 79 (С) (фиг.3), обеспечивающие установку частоты, выполняющий функцию модулятора транзистор 80 (КТЗ -фиг.3) и формирователь 81 сигналов (DA3 - фиг.4).
На фиг.2 позициями 82 и 83 показаны рабочая и нерабочая полярности постоянного магнита 35, соответственно которому выполнены другие постоянные магниты 36 и 37. Каждый постоянный магнит выполнен с магнитопроводящей П-образной скобой 84.
Датчики 32, 33, 34 образуют ряды датчиков, каждый из которых имеет центральный датчик, расположенный в центре соответствующего ряда. В нейтральном положении рабочего органа 17 или 18 рабочая полярность постоянного магнита, соответствующего своему рабочему органу, расположена над центральным датчиком соответствующего ряда датчиков 32, 33 или 34, а торцы магнитопроводящей скобы 84, соответствующей этому органу управления, расположены над датчиками, которые расположены по обеим сторонам от центрального датчика.
Работа устройства управления электроприводом машины поясняется на примере управления электроприводом исполнительных механизмов башенного крана. Перед работой устройства определенный код шифратора устанавливают переключателем 61 (SA - фиг.3) и в процессе работы устройства код шифратора не меняется, причем на плате переключателя 50 (SA - фиг.4) устанавливают тот же код шифратора, а затем соединяют плату шифратора с платой дешифратора.
Для того чтобы привести в действие описываемое устройство, соединяют его с источником тока 26 (фиг.2), перемещают органы управления на колонках управления 19 и 20 в заданных направлениях, включая органы управления 17 и 18. Поскольку органы управления 17 и 18 связаны с постоянными магнитами 35, 36 и 37 (фиг.3), то последние во время их перемещений взаимодействуют с датчиками 32, 33 и 34 и формируют кодограмму (командные сигналы или сигналы управления), шифруют их и передают шифры (коды) по проводам электрического кабеля 74 на блоки 11 и 12 дешифраторов. Формирование командных сигналов в кодограмму происходит с помощью схем шифраторов, командоаппаратов, органов управления, включая кнопки, причем каждому положению командоаппаратов и включению кнопок соответствует своя шифрованная (кодовая) комбинация сигналов.
При перемещении органов управления 17 и 18 вместе с их концевыми частями перемещаются постоянные магниты 35, 36 или 37 (фиг.2), а вместе с каждым постоянным магнитом перемещается в одну из сторон магнитопроводящая П-образная скоба 84, которая своими торцовыми частями блокирует первые положения органа управления при перемещении его в обоих направлениях.
Это достигается тем, что при перемещении магнитопроводящей П-образной скобы 84 в одном из направлений ее торцовые части взаимодействуют с датчиками, которые расположены с боковых сторон от центрального датчика 32, 33 или 34, и этим взаимодействием ограничивает срабатывание крайних датчиков по отношению к центральному или среднему датчику, который находится во взаимодействии с рабочей частью 82 постоянного магнита 35, 36 или 37.
Формирование командных сигналов производится закорачиванием на общий провод - “земля” (GND) соответствующих выводов "33-9" DD1 платы шифратора (фиг.3). На плате дешифратора соответствующие им выводы и цепи имеют те же обозначения (DD2, фиг.4). Исходное состояние входов шифратора (фиг.3) обеспечивается подключением их к шине питания через блок резисторов микросхем (DA4-DA6), что соответствует логической “1”. Сигнал управления соответствует логическому “0”. Вследствие этого включение любого механизма осуществляется замыканием на “землю” (GND) соответствующего вывода “33-9” (DD1). На плате дешифратора (фиг.4) управляющие сигналы имеют ту же полярность (логический “0”). Поэтому управление силовыми ключами (А2-А24) осуществляется инверсными выходами триггеров буферного регистра (DD5-DD9).
При работе устройства поле постоянных магнитов 35, 36 и 37 (фиг.3) при их перемещении воздействует на чувствительные зоны микросхем датчиков 32, 33, 34 и при воздействии магнитного поля соответствующей амплитуды и полярности на один из датчиков одним постоянным магнитом блокируется включение соседних датчиков. Это достигается благодаря тому, что каждый постоянный магнит снабжен П-образным магнитопроводом, подводящим магнитные поля неработающей полярности по обеим сторонам от центра рабочего торца постоянного магнита.
Далее выходной сигнал с датчиков 32, 33 и 34 поступает (фиг.4) через микросхемы 41 (DD4) и 47 (DD9) на вход (телекоммуникационной) микросхемы 38 (DD1). После этого зашифрованные сигналы управления поступают по двухжильному проводу на приемную часть, в частности на блоки 11 и 12 дешифраторов (фиг.1), которые обеспечивают ввод шифрограммы с канала связи, ее расшифровку, контроль, хранение в буферном регистре 48 (фиг.4) на время приема и выдачи дискретных сигналов через транзисторные ключи для управления исполнительными реле. При этом нулевое положение органов управления 17 и 18 бесконтактных переключателей блокируют первые положения переключателей в обеих направлениях и эту функцию выполняют микросхемы коммутаторов 60 (фиг.3). Режим работы микросхемы 38 (DD1) обеспечивает непрерывную выдачу шифрограммы сразу после подачи питания.
При работе устройство управления ключами коммутаторов 60 обеспечивает блокирование включения первого и второго положений переключателя при включенном нулевом положении и блокирует каждое последующее положение сигналом предыдущего. Например, при включенном первом положении переключателя блокируется выход второго положения переключателя. Вышеописанный принцип работы переключателей совместно с П-образным постоянным магнитом устраняет неоднозначность считывания, обеспечивая в любом положении любого органа управления выход только с одной микросхемы одного датчика 32 или 33, или 34. При этом микросхема 38 (DD1-фиг.4) производит считывание управляющих сигналов CLCO и S совместно с микросхемами 40 и 41 (DD3 и DD4). При этом обеспечивается импульсное питание бесконтактных переключателей (t=15 мкс; Т=5 мкс) с целью экономии энергопотребления.
Дешифрация кодограммы или сигналов происходит следующим образом. Входной сигнал поступает на формирователь 81 (DA3 - фиг.4), а затем на (телекоммуникационную) микросхему 39 (DD2), выполняющую функцию дешифратора. Периодически, после успешного приема каждой шифрограммы, выдается строб записи (ТРА - вывод “35”) в буферный регистр 47 (DD4-DD9), с выходов которого управляются транзисторные кодовые ключи 51.
Поскольку дешифратор имеет специальное устройство защиты 52 и 53 (VT1, DD3), то последнее управляет импульсами микросхемы 39 (DD2), при прекращении которых спустя 1,5-2 секунды блокируется через диод 69 (V9) выход шифра. В случае перерыва импульсов на время более 2 секунд устройство защиты 52 и 53 обеспечивает отключение устройства управления.
Органы управления 17 и 18 (фиг.2), имеющие крестообразную конструкцию рабочей части с механизмом самовозврата в нулевые положения, позволяют оператору во время его работы осязать рукою через рукоятки фиксированные рабочие положения, соответствующие положениям исполнительных механизмов башенного крана, связанных с электродвигателями, которые управляются блоком 66 исполнительных реле.
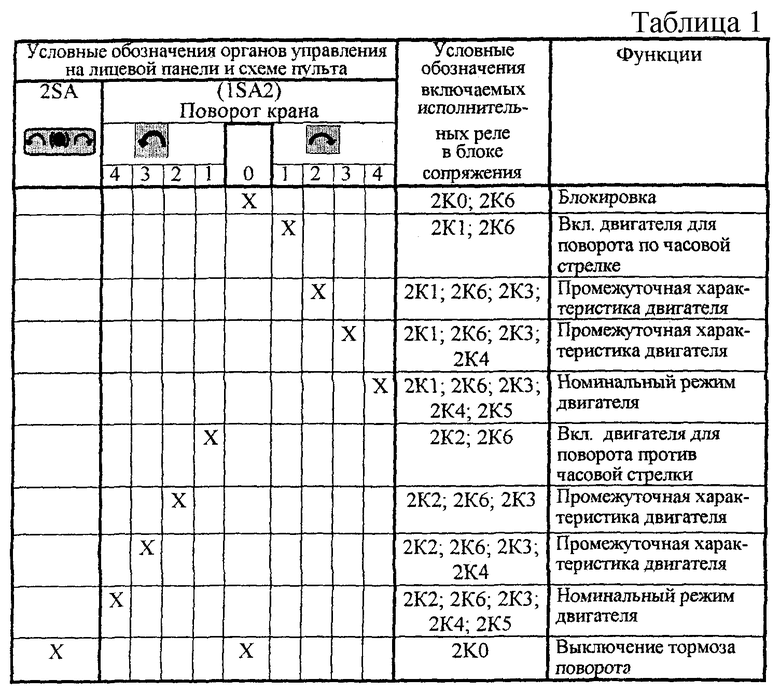
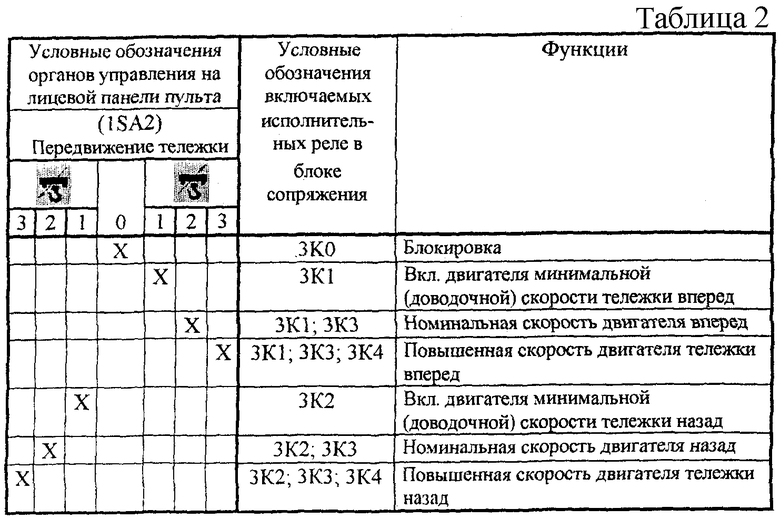
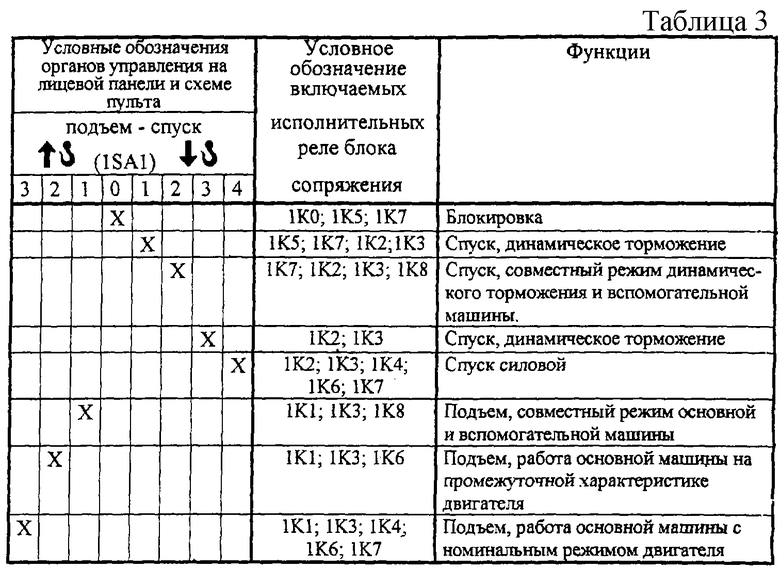
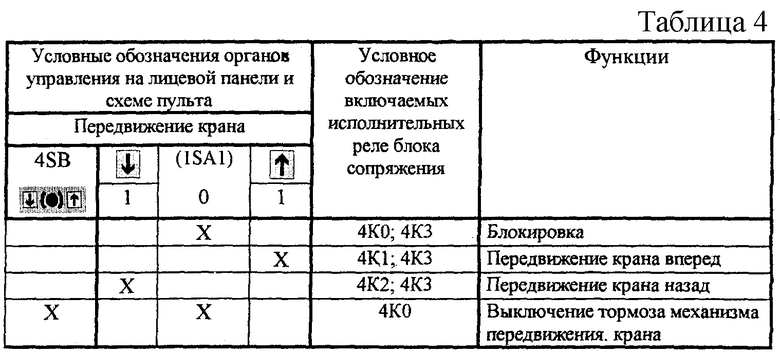
Орган управления 17 имеет диаграмму “4-0-4” (таблица 1) при перемещении его в левую и правую стороны для управления электродвигателем механизма поворота крана, а также положения “3-0-3” (таблица 2) при переключении вперед - назад для управления электродвигателем механизма передвижения грузовой тележки. Орган управления 18 имеет диаграмму осязаемых положений “1-0-1” (таблица 4) при перемещении его в направлениях влево - вправо для управления электродвигателями механизмов передвижения крана по рельсовому пути, а также осязаемые положения “4-0-3” (таблица 3) при перемещении его вперед - назад для управления электродвигателем механизма грузовой лебедки. Каждому осязаемому положению органов управления соответствует своя шифрованная комбинация сигналов.
После передачи зашифрованных сигналов управления, расшифровки их включаются в работу исполнительные реле 1К, 2К, ЗК и 4К (фиг.5) управления электродвигателями механизмов крана в соответствии с порядком их включения, показанном в таблицах 1-4.
В таблице 1 показаны условные обозначения срабатывающих исполнительных реле 2К и их функции в зависимости от положений “4-0-4” органа управления 17 при повороте поворотной части башенного крана вокруг его вертикальной оси. В таблице 2 показаны условные обозначения срабатывающих исполнительных реле 3К и их функции в зависимости от положений “3-0-3” органа управления 17 при передвижении грузовой тележки с грузовым крюком вдоль стрелы башенного крана. В таблице 3 показаны условные обозначения срабатывающих исполнительных реле 1К и их функции в зависимости от положений “4-0-3” органа управления 18 при подъеме или опускании груза грузовым крюком крана. В таблице 4 показаны условные обозначения срабатывающих исполнительных реле 4К и их функции в зависимости от положений “1-0-1” органа управления 18 при передвижении башенного крана по рельсовому пути.
Например, при перемещении органа управления из положения “0” в положение “4” против часовой стрелки (таблица 1) орган управления проходит в указанном направлении положения “1”, “2” и “3”, при этом включаются сначала в работу соответствующие этому положению исполнительные реле 2К2, 2К6 и включают электродвигатель механизма поворота поворотной части крана в направлении против часовой стрелки.
При прохождении органом управления положений “2” и “3” включаются сначала исполнительные реле “2К2”, “2К6” и “2К3”, а затем включаются те же последние реле с добавлением исполнительного реле “2К4” и включение этих исполнительных реле в указанной последовательности обеспечивают запуск электродвигателя и вывод его на промежуточный режим, в частности на промежуточный крутящий момент вращения вала электродвигателя и промежуточную частоту его вращения.
При дальнейшем перемещении органа управления в положение “4” включаются соответствующие исполнительные реле, указанные в таблице, и выводят электродвигатель на номинальный режим его работы.
Из таблицы 1 следует, что при отклонении органа управления от положения “0” в любую из сторон к любому из его положений до включения вышеупомянутых исполнительных реле в работу включается сначала исполнительное реле “2К0” и обеспечивает выключение тормоза механизма поворота поворотной части башенного крана. Аналогичным образом обеспечивается работа исполнительных реле, обозначенных в таблицах 2-4.
Ниже представлены диаграммы положений органов управления - таблицы 1-4.
Источники информации
1. А.Г. Яуре и Е.М. Певзнер. Электроприводы с контактно-контроллерным управлением. Крановый электропривод. Справочник. М.: Энергоатомиздат, 1988, с.244-285.
2. Н.И. Пискунов, В.М. Рождественский и А.В. Слуцкий. Переключатель. Описание изобретения к патенту РФ №2040060, кл. Н 01 Н 25/00, 05.01.1993, выданному Товариществу с ограниченной ответственностью Фирме “РАДУК”.
3. А.В. Слуцкий. Система радиоуправления грузоподъемными кранами. Журнал “Тяжелое машиностроение”, 2002, №4, с.33 и 34.
4.KABUSHIKI KAISHA TOKYO KIKAI SEISAKUSHO. Устройство управления электроприводом машины, заявка Японии 4862199, Н 02 Р 7/67, 25.02.1999 и заявка Европейского патентного ведомства ЕР 1032117 А2, Н 02 Р 7/67, 14.02.2000 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БАШЕННОГО КРАНА | 2005 |
|
RU2286305C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2009 |
|
RU2417937C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| ЭЛЕКТРОННОЕ РЕЛЕ | 2009 |
|
RU2418336C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ВОДОНОСНЫЙ БЫТОВОЙ ПРИБОР С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2459570C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ ОТ ОПРОКИДЫВАНИЯ | 2012 |
|
RU2542850C2 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1986 |
|
SU1388205A1 |
| Устройство для контроля местонахождения струга в лаве | 1979 |
|
SU883408A1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПРОТРАВЛИВАНИЯ СЕМЯН | 2019 |
|
RU2715689C1 |
Изобретение относится к электротехнике и может быть использовано в устройствах управления машин, например подъемно-транспортных машин, в которых кабина управления удалена от электродвигателей исполнительных органов. Техническим результатом является расширение функциональных возможностей, повышение надежности и срока службы. В устройство управления электроприводом машины введен разъем, дешифратор соединен с блоком реле и образует с ним блок сопряжения, соединенный с блоками шифраторов разъемом. Блоки управления с органами управления, модули управления с управляющими элементами объединены колонками управления, образующими пульт управления электроприводом машины. Блок шифраторов содержит последовательно расположенные датчики положения органа управления, снабженного постоянным магнитом с магнитопроводящей П-образной скобой. В нейтральном положении рабочего органа постоянный магнит расположен над центральным датчиком, а торцы П-образной скобы – над датчиками, расположенными по обеим сторонам от центрального датчика. 8 ил., 4 табл.
Устройство управления электроприводом машины, включающее блоки управления с органами управления, модули управления, выполненные с управляющими элементами, соединенными с блоками дешифраторов, блок реле, соединенный с блоком реле аппаратуры электропривода, отличающееся тем, что в него введен разъем, дешифратор соединен с блоком реле и объединен с ним в блок сопряжения, который соединен с блоками шифраторов разъемом, при этом блоки и модули управления объединены колонками управления, образующими пульт управления электроприводом машины, каждый блок шифратора включает по крайней мере один ряд последовательно расположенных датчиков положения органа управления, каждый орган управления выполнен с постоянным магнитом, имеющим возможность его взаимодействия с упомянутыми датчиками, постоянный магнит выполнен с магнитопроводящей П-образной скобой, при этом в нейтральном положении рабочего органа постоянный магнит расположен над центральным датчиком упомянутого ряда датчиков, а торцы магнитопроводящей П-образной скобы расположены над датчиками, которые расположены по обеим сторонам от центрального датчика.
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| RU 2073306 C1, 10.02.1997 | |||
| Асинхронный электропривод | 1988 |
|
SU1658352A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ | 1971 |
|
SU414381A1 |
| Штамп для закрытой отрезки и высадки стержневых изделий | 1987 |
|
SU1440596A1 |
| US 4614274 A, 30.09.1986 | |||
| DE 3835522 A1, 03.05.1990 | |||
| EP 0734993 A2, 02.12.1996. | |||

