Изобретения относятся к способам выправки железнодорожного пути, используемым при его ремонте, и к устройствам, которые могут быть использованы при ремонте пути для его выправки.
Известен способ выправки железнодорожного пути, заключающийся в том, что измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого и выправляют путь [1]
При этом способе выправки не обеспечивается точная постановка пути в требуемое положение.
Техническим результатом изобретения является повышение качества выправки пути путем обеспечения выправки длинных неровностей пути с повышенной плавностью, которая не зависит от исходного положения пути, а также путем обеспечения установки начала и конца переходных кривых в зависимости от технологических требований по проекту или с привязкой к фактическому положению пути.
Для достижения этого технического результата в способе выправки железнодорожного пути, заключающемся в том, что измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого и выправляют путь, с учетом упомянутых измерений и жесткости пути определяют положение его в пространстве относительно неподвижных координат, в процессе выправки пути дополнительно измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого, а выправляют путь по результату сравнения упомянутого положения пути в пространстве и дополнительного измерения стрел изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого.
Известна путевая машина, содержащая раму, опирающуюся на ходовые тележки, и смонтированные на раме устройства для измерения стрел изгиба пути в плане и/или продольном профиле, и/или возвышения одного рельса относительно другого, включающее в себя соответствующие измерительные базы и датчики, устройство для управления выправкой пути, соединенное с указанными устройствами для измерения, и выправочное устройство, включающее в себя приводы и соединенное с устройством для управления выправкой пути [2]
Для достижения указанного технического результата в путевой машине, содержащей раму, опирающуюся на ходовые тележки и смонтированные на раме устройства для измерения стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого, включающее в себя соответствующие измерительные базы и датчики, устройство для управления выправкой пути, соединенное с указанными устройствами для измерения, и выправочное устройство, включающее в себя приводы и соединенное с устройством для управления выправкой пути, последнее состоит из вычислительного блока, датчика пути, блока ввода априорной информации и блока сравнения, причем вычислительный блок выполнен с возможностью определения величин смещений пути относительно неподвижных координат, определяющих положение пути в пространстве, соответствующие входы вычислительного блока и блока сравнения соединены с указанными соответствующими датчиками через переключатель для избирательного соединения их с соответствующим блоком, выходы датчика пути и блока ввода априорной информации соединены с другими соответствующими входами вычислительного блока, а выходы последнего соединены с другими соответствующими входами блока сравнения, соответствующие выходы которого соединены с соответствующими приводами выправочного устройства.
Кроме этого, машина снабжена устройством перемещения соответствующих концов измерительных баз, а в цепях между выходами вычислительного блока и соответствующими входами блока сравнения установлен дополнительный переключатель для избирательного соединения выходов вычислительного блока с указанным устройством перемещения или с соответствующими входами блока сравнения.
Известно устройство для управления выправкой железнодорожного пути, содержащее датчики стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого [3]
Для достижения указанного выше технического результата устройство для управления выправкой железнодорожного пути, содержащее датчики стрел изгиба пути в плане и/или продольном профиле и возвышения одного рельса относительно другого, снабжено вычислительным блоком, датчиком пути, блоком ввода априорной информации и блоком сравнения, причем вычислительный блок выполнен с возможностью определения величин смещений пути относительно неподвижных координат, определяющих положение пути в пространстве, соответствующие входы вычислительного блока и блока сравнения соединены с указанными датчиками через переключатель для избирательного соединения их с соответствующим блоком, выходы датчика пути и блока ввода априорной информации соединены с другими соответствующими входами вычислительного блока, а выходы последнего соединены с другими соответствующими входами блока сравнения, соответствующие выходы которого соединены с соответствующими приводами исполнительного органа для выправки пути.
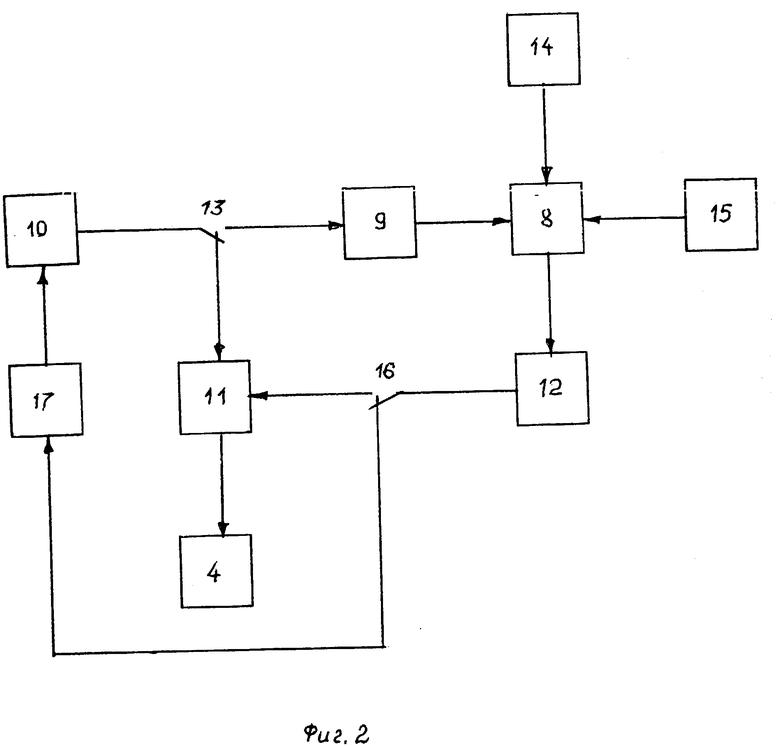
На фиг. 1 изображена выправочно-подбивочно-рихтовочная машина, общий вид; на фиг. 2 блок-схема устройства управления выправочным устройством машины.
Выправочно-подбивочно-рихтовочная машина содержит раму 1, опирающуюся на ходовые тележки 2, установленные на раме 1 подбивочное устройство 3, подъемно-рихтовочное устройство 4, устройство для измерения стрел изгиба пути в плане, включающее в себя измерительную базу и датчик стрел изгиба пути в плане, устройство для измерения стрел изгиба пути в продольном профиле, включающее в себя измерительную базу и датчик стрел изгиба пути в продольном профиле, устройство для измерения возвышения одного рельса относительно другого, включающее в себя датчик возвышения одного рельса относительно другого. На раме 1 также установлены энергетическая установка 5, кабина 6 с блоком 7 управления машиной. Подбивочное устройство 3 включает в себя рабочие органы для уплотнения баланса под шпалами, в шпальных ящиках, на откосах и плечах балластной призмы. Подъемно-рихтовочное устройство 4 состоит из механизмов подъема и сдвига пути, которые могут быть объединены в один агрегат или установлены порознь и разнесены вдоль машины. Механизм подъема пути, например, включает в себя две размещаемые над рельсами пути балки, несущие захваты для рельсов и соединенные с рамой 1 при помощи силовых цилиндров, перемещающих балки в вертикальной плоскости для осуществления подъема пути при выправке его в продольном профиле и по уровню, определяющему возвышение одного рельса относительно другого, а также для установки балок с захватами для рельсов в рабочее или транспортное положение. Для осуществления сдвига пути в горизонтальной плоскости при выправке пути в плане балки соединены с расположенными поперек машины силовыми цилиндрами, шарнирно закрепленными на раме 1.
Устройство для измерения стрел изгиба пути в плане содержит измерительные тележки, по меньшей мере одну измерительную базу, связанную с соответствующими измерительными тележками, и по меньшей мере один датчик стрел изгиба пути в плане, установленный на соответствующей измерительной тележке и связанный с измерительной базой, а также устройство перемещения переднего конца измерительной базы.
Устройство для измерения стрел изгиба пути в продольном профиле также содержит измерительные тележки, измерительные базы, связанные с этими тележками и размещаемые над рельсами пути и датчики стрел изгиба пути в продольном профиле, связанные с измерительными базами и установленные на соответствующих измерительных тележках. Это устройство для измерения стрел изгиба пути в продольном профиле может содержать одну измерительную базу, связанную с измерительными тележками и размещаемую по оси пути.
Одни и те же измерительные тележки могут быть использованы обоими устройствами для измерения стрел изгиба пути.
Устройство для измерения возвышения одного рельса относительно другого содержит по меньшей мере один датчик возвышения одного рельса относительно другого, например физический маятник, установленный на одной из упомянутых выше измерительных тележек.
Машина также содержит устройство управления подъемно-рихтовочным устройством 4, которое может быть включено в блок 7 управления машиной и содержит вычислительный блок 8, входы которого через аналого-цифровой преобразователь 9 соединены с датчиками 10 стрел изгиба пути в плане и/или продольном профиле и возвышения одного рельса относительно другого, и блок 11 сравнения, соответствующие входы которого через цифроаналоговый преобразователь 12 соединены с соответствующими выходами блок 8, выходы блока 11 соединены с соответствующими приводами устройства 4 для управления ими. Блок 8 выполнен с возможностью определения смещений пути относительно неподвижных координат, определяющих положение пути в пространстве. Соответствующие входы блока 11 соединены с датчиками 10. В цепи между датчиками 10 и преобразователем 9 включен переключатель 13 для соединения датчиков 10 с блоком 11 или с преобразователем 9 при управлении выправкой пути или при измерении стрел изгиба пути в плане и/или продольном профиле и возвышения одного рельса относительно другого, а в цепи между преобразователем 12 и блоком 11 сравнения включен переключатель 16 для соединения преобразователя 12 с блоком 11 сравнения или с устройством 17 перемещения передних концов измерительных баз по горизонтали и/или вертикали. Если сигналы от датчиков 10 поступают в цифровом виде и управление подъемно-рихтовочным устройством осуществляется также в цифровом виде, то преобразователи 9 и 12 не нужны. Устройство управления подъемно-рихтовочным устройством 4 содержит также датчик 14 пути, соединенный с одним из входов блока 8. Один из входов блока 8 соединен с блоком 15 ввода априорной информации, например, представляющим собой клавиатуру.
В цепь между блоком 8 и преобразователем 12 может быть включен переключатель для отключения блока 11 от блока 8 и связи блока 11 с ручным задатчиком.
Позицией 10 обозначены все датчики упомянутых устройств для измерения, однако каждый из этих датчиков выдает соответствующий сигнал в блок 8 или 11, которые определяют стрелы изгиба пути в плане и/или продольном профиле относительно соответствующих измерительных баз и возвышение одного рельса относительно другого.
Устройство управления подъемно-рихтовочным устройством 4 может быть установлено как на рихтовочных машинах, так и на выправочных, т.е. на машинах, порознь осуществляющих выправку пути в плане или в продольном и поперечном профилях пути. В этих машинах поэтому используются соответственно датчики стрел изгиба пути в плане или датчики стрел изгиба пути в продольном профиле и возвышения одного рельса относительно другого. Соответствующие датчики могут быть установлены, например, на балластировочных или щебнеочистительных машинах, а также соответствующие этому выправочные устройства, т.е. рихтовочные или подъемные устройства. Поэтому в формуле изобретения подъемно-рихтовочное устройство может быть названо выправочным устройством, устройством для выправки и постановки пути в заданное положение или исполнительным органом для выправки пути, а упомянутое устройство управления - устройством для управления выправкой железнодорожного пути (с постановкой его в заданное положение). Поскольку последнее устройство может быть установлено, как было сказано выше, на многих типах машин, то заявляемая машина может быть названа путевой машиной.
Машина и устройство для управления выправкой пути работают следующим образом, осуществляя способ выправки железнодорожного пути, который заключается в следующем.
При непрерывном перемещении машины измеряют стрелы изгиба пути в плане и/или продольном профиле на определенных измерительных базах и/или возвышение одного рельса относительно другого при помощи соответствующих датчиков 10. При этом переключатель 13 замыкает цепи между датчиками 10 и входами преобразователя 9. Это предварительное измерение стрел изгиба пути и возвышения одного рельса относительно другого необходимо для определения расчетным способом положения пути в пространстве относительно неподвижных координат, поскольку для этого необходимо знать значения указанных стрел и возвышение одного рельса относительно другого на всем протяжении выправляемого участка пути. Сигналы датчиков 10 поступают на соответствующие входы блока 8. Одновременно с этим на один из входов блока 8 поступают сигналы от датчика 14 пути, связанного с мерным колесом. На один из входов блока 8 через клавиатуру 15 вводится априорная информация ограничения на сдвижку и подъемку пути, несдвигаемые точки (мосты, переезды, путепроводы и др.), параметры кривых участков пути в плане и по возвышению одного рельса относительно другого и/или переломов продольного профиля, скорости движения поездов по участку пути и т.д.
В блоке 8 для определения положения пути в плане и/или продольном профиле относительно неподвижных координат в пространстве первоначально сформированные измеренные стрелы подвергают сглаживанию, например, из каждого определенного количества измеренных значений стрел изгиба пути в плане и/или продольном профиле исключают несколько максимальных и минимальных значений, а по оставшимся значениям определяют соответствующее сглаженное значение и присваивают его одной из дискретных точек длины пути, на которой измерялось определенное количество значений стрел. Используя сглаженные значения стрел изгиба пути в качестве исходных данных для системы линейных уравнений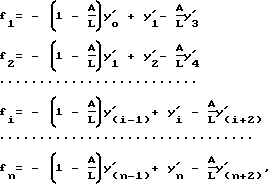
где f1; f2;fi;fn сглаженное значение стрелы, соответственно в дискретных точках 1, 2,i,n;
A; L геометрические размеры измерительной системы;
y1; y2;yi;yn ординаты неровностей пути в месте расположения механизма выправки пути или средней измерительной тележки, соответственно в точках деления по длине пути: 1'; 2';i';n'; ординаты неровностей пути в точках по длине пути, соответственно отстоящих на расстоянии А от средней измерительной тележки, то есть в месте расположения задней концевой тележки измерительной системы;
ординаты неровностей пути в точках по длине пути, соответственно отстоящих на расстоянии А от средней измерительной тележки, то есть в месте расположения задней концевой тележки измерительной системы; ординаты неровностей пути в точках по длине пути, соответственно отстоящих на расстояние A-L от средней измерительной тележки, то есть в месте расположения передней концевой тележки измерительной системы.
ординаты неровностей пути в точках по длине пути, соответственно отстоящих на расстояние A-L от средней измерительной тележки, то есть в месте расположения передней концевой тележки измерительной системы.
Определяют ординаты неровностей пути, то есть положение пути в пространстве.
Так как в общем случае геометрические размеры измерительной базы не вписываются в дискретную сетку измеряемых значений стрел изгибов пути, то промежуточные значения ординат выражает через ординаты в соседних дискретных точках с учетом жесткости пути, используя дифференциальное уравнение упругой линии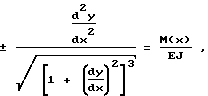
где x текущее значение координаты по длине пути;
y ордината неровности в x-й точке по длине пути;
M(x) изгибающий момент в x-й точке по длине пути;
EJ жесткость путевой решетки.
Таким образом, на выходах блока 8 формируются либо численные значения ординат неровностей пути в плане и/или продольном профиле, определяющих положение пути в пространстве, в соответствии с которым определяют программные численные значения величин сдвижек пути и/или подъемок пути, либо соответствующие им программные численные значения стрел изгиба пути в плане и/или продольном профиле, а также определяются начало, конец и длины переходных кривых, радиус круговых кривых в плане, возвышение одного рельса относительно другого, начало и конец переломов и радиус круговой кривой в продольном профиле в привязке к длине пути, формируются программные значения возвышения одного рельса относительно другого.
Под положением пути в пространстве подразумевается множество ординат неровностей пути в плане и/или продольном профиле относительно несдвигаемых точек по длине пути.
Так как на выходе вычислительного блока 8 формируются либо программные численные значения величин сдвижек пути и/или подъемок пути, либо соответствующие им программные численные значения стрел изгиба пути в плане и/или продольном профиле, то и выправка пути может осуществляться в нескольких вариантах.
Так, для осуществления выправки пути по одному из них на соответствующие входы блока 11 с выходов блока 8 подаются сигналы, соответствующие программным значениям стрел изгиба пути в плане и/или продольном профиле и возвышение одного рельса относительно другого. Одновременно с этим при непрерывном перемещении машины еще раз измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и возвышение одного рельса относительно другого при помощи соответствующих датчиков 10, переключатель 13 замыкает цепи между датчиками 10 и соответствующими входами блока 11. При этом на эти входы блока 11 поступают сигналы от датчиков 10, соответствующие стрелам изгиба пути в плане и/или в продольном профиле и возвышению одного рельса относительно другого. В блоке 11 сигналы от датчиков 10 и от выходов блока 8 сравниваются и в результате сравнения соответствующих сигналов формируются управляющие воздействия на соответствующие приводы подъемно-рихтовочного устройства 4, осуществляя тем самым перемещения рельсо-шпальной решетки (выправку пути) в горизонтальной и/или вертикальной плоскостях и устанавливая путь в требуемое положение.
Для осуществления выправки пути по другому варианту перемещают передние или задние концы измерительных баз с помощью соответствующего устройства 17 на величину, равную программному значению сдвижки и/или подъемники пути по сигналам, снимаемым с выхода цифроаналогового преобразователя 12 или вычислительного блока 8, формируя тем самым дополнительный сигнал на выходе датчиков 10 стрел изгиба пути в плане и/или продольном профиле и перемещая путь с помощью подъемно-рихтовочного устройства 4 с учетом дополнительного сигнала в заданное положение. При этом переключатель 16 замыкает цепи между входами устройств перемещения переднего или заднего концов измерительных баз и соответствующими выходами блока 12.
Заявляемый способ выправки железнодорожного пути, путевая машина и устройство для управления выправкой пути обеспечивают выправку длинных неровностей с повышенной плавностью, не зависящей от исходного положения пути, с учетом фактического положения пути в кривых участках и переломах продольного профиля, обеспечивая установку начала и конца переходных кривых в зависимости от технологических требований по проекту или с привязкой к фактическому положению пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| ПУТЕВАЯ МАШИНА | 2001 |
|
RU2196860C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| МАШИНА ДЛЯ ВЫПРАВКИ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2097471C1 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
Использование: при ремонте железнодорожного пути для его выправки. Сущность изобретения: машина содержит опирающуюся на ходовые тележки раму, на которой смонтированы устройства для измерения стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого, устройство для управления выправкой пути, соединенное с устройствами для измерения, и выправочное устройство. Устройство для управления выправкой пути состоит из вычислительного блока, выполненного с возможностью определения смещений пути относительно неподвижных координат, определяющих положение пути в пространстве, датчика пути, блока ввода априорной информации и блока сравнения. При непрерывном перемещении машины при помощи датчиков измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого. В процессе выправки пути дополнительно измеряют стрелы изгиба пути в плане и/или продольном профиле на определенной измерительной базе и/или возвышение одного рельса относительно другого, а выправляют путь в соответствии с результатом сравнения величин дополнительно измеренных стрел и/или возвышения одного рельса относительно другого с соответствующими программными величинами. 3 с. и 1 з.п. ф-лы, 2 ил.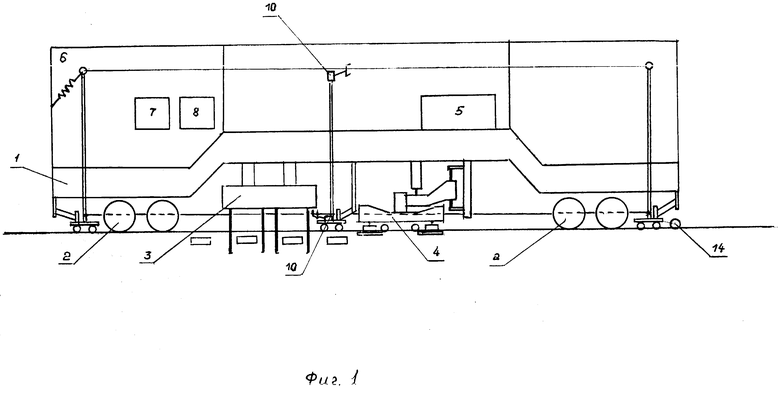
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сырейщиков Ю.П | |||
| Новые путевые машины | |||
| - М.: Транспорт, 1984, с.195 - 199 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Там же, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |

