Изобретение относится к области фотограмметрии и может быть использовано при обновлении топографических карт.
Известен способ определения элементов внешнего ориентирования фотоснимка местности по опознанным опорным точкам на характерных элементах фотоизображения (Лобанов А.Н. Журкин И.Г. Автоматизация фотограметрических процессов. М. Недра, 1980).
Задача определения элементов внешнего ориентирования фотоснимка по этому способу осложняется или вообще не решается при недостаточном количестве визуально отождествленных опорных точек.
Указанного недостатка лишен способ определения элементов ориентирования по точкам контурных линий карты (авт. св. СССР N 1770744).
Определение элементов ориентирования с помощью этого способа состоит из выбора опорных точек карты, определения их координат, измерения координат точек фотоснимка и чередующихся операций, нахождения элементов ориентирования фотоснимка по координатам точек снимка и карты, расчетов положения опорных точек карты на фотоизображении и выбора новых точек на контурных линиях фотоизображения по минимуму их удаления от полученных точек.
Точность известного способа ограничена, поскольку одиночный фотоснимок не позволяет полностью использовать дополнительную информацию о пространственном положении топографических объектов местности.
Задачей предложенного способа является повышение точности определения элементов ориентирования фотоснимка местности путем использования дополнительной информации о пространственном местоположении объектов местности и за счет повышения точности измерений при более высокой разрешающей способности глаз оператора в процессе стереоскопического наблюдения фотоизображений местности.
Сущность предложенного способа определения элементов ориентирования фотоснимка местности заключается в том, что в способ определения элементов ориентирования фотоснимка местности, включающий выбор на топографической карте и фотоснимке не менее четырех пар соответствующих опорных точек, причем по крайней мере первая и последняя пары точек должны быть расположены на соответствующих контурных линиях карты и фотоснимка и обработку данных о координатах точек для определения элементов ориентирования фотоснимка местности, введены операции подбора к этому фотоснимку второго фотоснимка, имеющего с первым фотоснимком зону перекрытия, взаимного ориентирования фотоснимков, определения элементов этого ориентирования, получения трехмерной модели местности, измерения координат всех опорных точек трехмерной модели местности, расположенных на характерных деталях и контурных линиях модели местности, за исключением одной из точек, например последней опорной точки, расположенной на контурной линии, нахождения предварительных значений элементов ориентирования модели местности по координатам точек местности и измеренным координатам точек модели, по этим элементам ориентирования и координатам последней опорной точки карты определения положения этой точки на трехмерной модели местности, переноса в случае несовпадения с контурной линией этой точки на точку контурной линии, минимально удаленную от полученного расчетного положения, измерения координат этой опорной точки пространстве трехмерной модели местности, нахождения уточненных элементов ориентирования трехмерной модели местности по координатам опорных точек, исключая другую опорную точку, выполнения указанной последовательности операций для каждой пары соответствующих точек, выбранных на контурных линиях, до получения уточненных элементов ориентирования трехмерной модели местности, при которых каждая из точек, выбранных на контурных линиях топографической карты, совпадает с соответствующими линиями трехмерной модели местности, и последующего нахождения элементов внешнего ориентирования фотоснимка местности по элементам ориентирования трехмерной модели местности и элементам взаимного ориентирования фотоснимков.
Реализация способа позволяет определять элементы ориентирования снимка без точного первоначального отождествления опорных точек. Количество опорных точек не ограничивается наличием характерных деталей на контурных линиях фотоснимка и топографической карты.
Предложенный способ существенно снижает затраты времени на предварительный выбор опорных точек, поскольку требуется опознавание не точечных объектов, а линейных, что несомненно уменьшает утомляемость глаз оператора.
Так как на контурных линиях, отображенных на карте и фотоснимке местности, может быть выбрано практически неограниченное количество точек, то это обстоятельство снижает влияние случайных ошибок измерений на точность определения элементов ориентирования фотоснимка местности.
При определении элементов ориентирования фотоснимка местности можно использовать все однозначно опознанные точки фотоснимка и карты.
Элементы ориентирования модели местности могут быть непосредственно использованы, например, при развитии сетей фототриангуляции.
На чертеже показана графическая интерпретация способа определения элементов внешнего ориентирования фотоснимка местности.
По первому фотоснимку 1 и второму фотоснимку 2 построена трехмерная модель 3 местности путем взаимного ориентирования фотоснимков.
Кроме этого, на чертеже показан фрагмент карты 4, например топографической. На нем тонкими линиями 5 отображены горизонтали, а утолщенными линиями 6 контурная нагрузка карты, например дороги. Кружками 7 обозначены несколько точек пересечения контурных линий с горизонталями.
На трехмерной модели 3 местности треугольниками 8 показаны три точки на ее пространственных контурных линиях, соответствующих контурным линиям карты. Квадратом 9 обозначена четвертая точка карты 4 в пространстве модели 3 местности. Положение этой точки определяют элементы ориентирования модели 3 местности.
Двойным кружком 10 отмечена точка контура модели 3, минимально отстоящая от точки 9.
Столик 11 с измерительной маркой 12 предназначен для измерения координат точек модели 3 местности.
При определении элементов внешнего ориентирования (ЭВО) фотоснимка выполняют его привязку к карте по сохранившимся на местности контурным линиям и характерным деталям топографических объектов. Подбирают к этому фотоснимку еще один, составляющий с первым фотоснимком стереопару.
На графических элементах содержания топографической карты, отображающих сохранившиеся на местности объекты, выбирают не менее четырех опорных точек, причем по крайней мере первая и четвертая точки должны находиться на контурных линиях 6.
Координаты этих четырех точек находят в каталогах или по карте путем считывания и измерений координаты этих четырех точек.
Высотные отметки точек могут быть, например, определены по горизонталям, пересекающим контурные линии карты.
Одним из известных способов выполняют взаимное ориентирование фотоснимков и строят трехмерную модель местности. Измерением углов взаимного наклона фотоснимков или расчетным путем по измеренным координатам соответствующих точек фотоснимков находят элементы их взаимного ориентирования.
Например, с помощью измерительного столика 11 измеряют координаты трех точек модели 3 или находят их аналитически, используя элементы взаимного ориентирования снимков.
Координаты точек, однозначно не локализованных на контурных линиях, измеряют в произвольном месте соответствующей контурной линии в пределах отрезка, примерно отождествленного с соответствующим отрезком карты.
По координатам трех пар соответствующих точек карты 5 и модели 3 местности составляют уравнения поправок для определения элементов ориентирования модели 3 местности.
Уравнения поправок могут быть представлены формулами (1) [см. Лобанов А. Н. Аэрофототопография. М. Недра, 1978, стр. 267]
aX•DXo + dX•DA + eX•DB + fX•DC + qX•Dt+lX vX,
bX•DYo + dY•DA + eY•DB + fY•DC + qY•Dt+lY vY,
cX•DZo + dZ•DA + eZ•DB + fZ•DC + qZ•Dt+lZ vZ, (1)
где lX X1o + DXg Xg,
lY Y1o + DYg Yg,
lZ Z1o + DZg Zg,
aX DXg/DXo 1,
bY DYg/DYo 1,
cZ DZg/DZo 1,
dX DXg/DA -DZg,
eX DXg/DB -DYg•sin A,
fX DXg/DC (c2m•X-c1m•Y)•t,
gX DXg/Dt DXg,
dY DYg/DA 0,
dY DYg/DB -DYg•tgB-Z•t/cosB,
eY DYg/DC (c5m•X-c4m•Y)•t,
fY DYg/Dt DYg,
dZ DZg/DA -DXg,
dZ DZg/DB -DYg•cosA,
eZ DZg/DC (c8m•X-c7m•Y)•t,
fZ DZg/Dt DZg,
Xo, Yo, Zo, A, B, C, t элементы ориентирования модели местности,
DXo.Dt поправки к приближенным значениям элементов внешнего ориентирования снимка,
aX.gZ коэффициенты уравнений поправок X, Y, Z геодезические координаты соответствующей опорной точки,
DXg, DYg, DZg приращения геодезических координат точек,
c1m. c9m направляющие косинусы угловых элементов ориентирования модели местности.
После решения уравнений поправок уточняют элементы ориентирования модели по формулам (2)
Xo Xo + DXo, Yo Yo + DYo, Zo Yo + DYo,
A A + DA, B B + DB, C C + DC,
t t + Dt. (2)
Далее по координатам последней (четвертой) опорной точки карты рассчитываются координаты вспомогательной точки 9 модели местности 3 по формулам (3).
Xm c1m(Xg Xo) + c4m(Yg Yо) + c7m(Zg Zo),
Ym c2m(Xg Xo) + c5m(Yg Yо) + c8m(Zg Zo),
Zm c3m(Xg Xo) + c6m(Yg Yо) + c9m(Zg Zo), (3)
где Xm, Ym, Zm координаты вспомогательной точки.
После определения положения вспомогательной точки измеряют ее отстояния от точек соответствующей контурной линии, находят на этой контурной линии точку с минимальным отстоянием, измеряют ее координаты и идентифицируют ее с четвертой точкой карты.
По координатам второй, третьей и полученной четвертой пары точек вычисляют уточненные элементы ориентирования трехмерной модели местности.
Указанную последовательность операций выполняют для всех точек, расположенных на контурных линиях карты, до тех пор, пока каждая из этих точек не совпадет с соответствующими контурными линиями трехмерной модели местности.
Для повышения точности определения элементов ориентирования на контурных линиях карты могут выбираться новые точки, составляться новые комбинации из них и дополнительно уточняться элементы ориентирования трехмерной модели местности с использованием метода наименьших квадратов при обработке результатов определения элементов ориентирования модели местности.
По этим элементам ориентирования и элементам взаимного ориентирования фотоснимков по формулам (4) определяют элементы ориентирования первого фотоснимка местности.
Ap arctg(-c1p/c9p),
Wp arcsin(-c6p),
Kp arctg(c4p/c5p), (4)
где c1p c1r•c1m+c2r•c2m+c3r•c3m,
c2p c1r•c4m+c2r•c5m+c3r•c6m,
c3p c1r•c7m+c2r•c8m+c3r•c9m,
c4p c4r•c1m+c5r•c2m+c6r•c3m,
c5p c4r•c4m+c5r•c5m+c6r•c6m,
c6p c4r•c7m+c5r•c8m+c6r•c9m,
c7p c7r•c1m+c8r•c2m+c9r•c3m,
c8p c7r•c4m+c8r•c5m+c9r•c6m,
c9p c7r•c7m+c8r•c8m+c9r•c9m,
Ap, Wp, Kp угловые элементы ориентирования фотоснимка местности,
c1p.c9p направляющие косинусы угловых элементов ориентирования фотоснимка местности,
c1r.c9r направляющие косинусы угловых элементов ориентирования взаимного ориентирования фотоснимков местности,
c1m. c9m направляющие косинусы угловых элементов ориентирования модели местности.
Предложенный способ может быть реализован с помощью аналоговых, аналитических и цифровых стереофотограмметрических приборов.
Трехмерная модель местности, построенная по фотоснимкам стереопары, позволяет выполнять стереоскопические наведения на точки модели местности, что обеспечивает повышение точности измерения координат точек, а следовательно, и повышение точности определения элементов ориентирования фотоснимка местности.
Элементы ориентирования фотоснимков и трехмерной модели местности, определенные предложенным способом, могут быть использованы при решении разнообразных фотограмметрических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ СНИМКА МЕСТНОСТИ | 1996 |
|
RU2124181C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ | 1993 |
|
RU2082093C1 |
| Способ определения элементов ориентирования фотоснимка местности | 1990 |
|
SU1770744A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| СПОСОБ ОБНОВЛЕНИЯ ЦИФРОВОЙ КАРТЫ МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2001 |
|
RU2226262C2 |
| Способ определения пространственных координат точек местности | 1981 |
|
SU1064151A1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ОБШИРНОЙ ТЕРРИТОРИИ | 2002 |
|
RU2217805C2 |
| Способ исправления топографической карты по аэрофотоснимкам стереопары | 1981 |
|
SU1000756A1 |
Использование: при обновлении топографических карт. Сущность изобретения: в известный способ ориентирования фотоснимка дополнительно включены операции подбора второго фотоснимка, имеющего с первым фотоснимком зону перекрытия, получение трехмерной модели местности, измерение координат опорных точек трехмерной модели, нахождение предварительных элементов ориентирования модели местности и последующее их уточнение до тех пор, пока все опорные точки, расположенные на контурных линиях топографической карты, не совпадут с соответствующими контурными линиями трехмерной модели местности, нахождение элементов внешнего ориентирования фотоснимка по элементам ориентирования трехмерной модели и элементам взаимного ориентирования фотоснимков. 1 ил.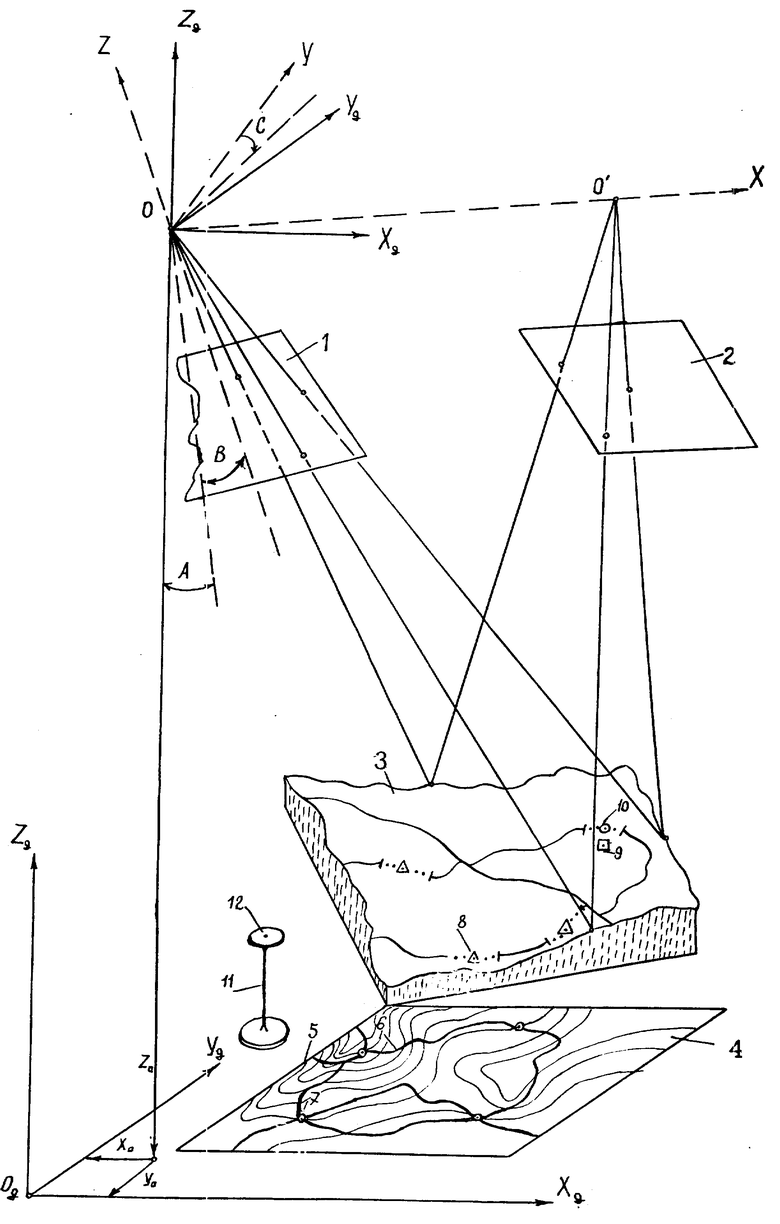
Способ определения элементов ориентирования фотоснимка местности, включающий выбор на топографической карте и фотоснимке не менее четырех пар соответствующих опорных точек, причем по крайней мере первая и последняя пары точек должны быть расположены на соответствующих контурных линиях карты и фотоснимка, обработку данных о координатах точек для определения элементов ориентирования фотоснимка местности, отличающийся тем, что подбирают к этому фотоснимку второй фотоснимок, имеющий с первым фотоснимком зону перекрытия, выполняют взаимное ориентирование фотоснимков, определяют элементы этого ориентирования, получают трехмерную модель местности, измеряют координаты опорных точек трехмерной модели местности, расположенных на опознанных характерных деталях и контурных линиях модели местности за исключением одной из точек, например последней, расположенной на контурной линии, находят предварительные значения элементов ориентирования модели местности по координатам точек местности и измеренным координатам точек модели, по этим элементам и координатам последней опорной точки карты определяют положение этой точки на трехмерной модели местности, в случае несовпадения полученной точки с контурной линией переносят ее на точку контурной линии, минимально удаленную от полученного расчетного положения, измеряют координаты этой опорной точки в пространстве трехмерной модели местности, находят уточненные элементы ориентирования трехмерной модели местности по координатам опорных точек, исключая другую точку, лежащую на контурной линии, осуществляют указанную последовательность операций для каждой пары соответствующих точек, выбранных на контурных линиях, до получения уточненных элементов ориентирования трехмерной модели местности, при которых каждая из точек, выбранных на контурных линиях топографической карты, совпадает с соответствующими контурными линиями трехмерной модели местности, по элементам ориентирования трехмерной модели и элементам взаимного ориентирования фотоснимков находят элементы внешнего ориентирования фотоснимка местности.
| SU, авторское свидетельство N 1770744, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
