Изобретение относится к фотограм метрии и может быть использовано пр создании и исправлении топографических карТу планов, фотокарт для определения координат малоразмерных или |Новь появившихся объектов местности. Известен способ определения пространственных координат точек местности по стереопаре фотоснимков, заключаю1цийся в построении геометрической модели, ее внешнем ориентировании в заданной системе коорди нат и собственно определении координат .точек местности ij . Однако такой способ не.обеспечивает определения пространственных точек местности, не изобр зившихся на основных фотоснимках, используемых для построения модели но изобразившихся на дополнительных например крупномасштабных, фотосним ках того же или нового фотографирования. Наиболее близким к предлагаемому являемся способ определения пространственных координат точек местности, сущность которого заключается в том, что с целью определения координат точек объектов, изобразившихся на дополнительных фотосним ках той же местности, после построения геометрической модели по основным фотоснимкам выполняют внешне ориентирование дополнительных фото.снимков по точкам этой модели и образуют вторую модель, совпадающую с первой, проектируют точки, дополнительных фотоснимков на геометрическую модель, построенную по основным фотоснимкам, и определяют пространственные координаты этих точек t2J . Недостатком известного способа является то, что дополнительные фотоснимки должны составлять стереопару т.е. он не позволяет определять пространственные координаты объектов, изобразившихся на допол-: нительных фотоснимках с перекрытием менее 50% и на одинрчных фотоснимках. Кроме того, такой способ не пр дусматривает использования результатов построения геометрической модели по основным фотоснимкам для последующего определения координат вновь появившихся объектов по их .изображению на фотоснимках нового, например повторного, фотографирования ./ Цель изобретения - определениепространственных координат точек местности на дополнительных фотоснимках с продольными перекрытиями менее 50i. Поставленная цель достигается ,.тем, что согласно способу определения координат точек местности,. вклю чающему сканирование основных фотоснимков, построение по стереопаре основных фотоснимков геометрической модели, формирование цифрового эквивалентного снимка и определение пространственных координат точек местности, изобразившихся на дополнительных фотоснимках, измеряют оптические плотности точек одного из фотоснимков, формирование цифрового эквивалентного снимка осуществ ляют по координатам и оптическим плотностям соответствующих точек геометрической модели основных фотоснимков , а координаты точек местности определяют по геометрической модели стереопары, составленной из цифрового эквивалентного и дополнительного снимков, ориентированной по пространственным координатам точек цифрового эквивалентного снимка. Данные о фотоизображении и пространственных координатах точек цифрового эквивалентного фотоснимка могут храниться на накопителе информации в виде массивов числен.ных значений оптических плотностей и пространственных координат и при необходимости, например с целью определ ения координат вновь появившихся объектов по фотоснимкам повторного фотографирования, восстанавливатьсяв виде фотоснимка с заданными значениямИ параметров и пространственными координатами всех точек фотоизображения. на чертеже показана схема получения цифрового эквивалентного фотоснимка и его использования при определении пространственных координат точек местности. На универсальном стереофотограмметрическом приборе в сочетании с устройством считывания фотоизобра- жения, ввода ,в ЭЦВМ и вывода изображения для записи на фотопленку или фотобумагу производят сканирование стереопары основных фотоснимков Pj и PJJ, в процессе которого измеряют плоские прямоугольные координаты X , Y точек фотоснимков и оптические плотности «J фотоизображений соответствующих точек одного.из фотоснимков, вводят их в ЭЦВМ, строят мбдель ориентируют ее в заданной системе координат и вычисляют пространственные координаты Хц / YH / Zn измеренных точек. Выбирают параметры цифрового эквивалентного фотоснимка Р:, масштаб, фокусное расстояние , формат,элементЫдвнешнего ориентирования Хз t I 5 , ЬО , ЭС. Угловые элементы.ориентирования цифрового эквивалентного фотоснимка S , W , je в зависимости от способа определения координат точек по дополнительным фотоснимкам (аналитического или на аналоговом универсал ном стереоприборе) принимают равными нулю или близкими по своим зна чениям соответствующим углам дополнительных фотоснимков. Используя значений пространствен ных координат Хп/ Хп п точек модели, построенной по стереопаре основных фотоснимков, и заданные значения элементов ориентирования ( 5 Дв Л ) 5 числяют плоские прямоугольные координаты X ,V цифрового эквивалентного фотоснимка Р . Вычисления произ водят по известным формулам связи координат точек местности и снимка - - CXn-XsVa,tl4n-4s)-b4H7:h-Zs)-c. VUn-4)-p3 v%vb +an-ZsVc - - Un-Xe)-a2K4n-4Vb2 4 n-2sVC2 У-т„«-1Un-XsVo -HYfl- rb,+и„-г у с, где Q; , b; , С;. (1,2,3) - направля ющие коси нусы, функции У1:ло1зых элементо ориенти рова.ни2 ,(с6, CJ ,зе) цифровог эквивалентногофотосним ка. При Хо YO О и л 00 -её о формула имеют вид г. : . г;. 7. , -tZn-ZcПо полученным координатам X ,Y и соответствующим им оптическим плотностям d формируют цифровой эквивалентный фотоснимок путем записи его фотоизображения на фотопленке. Для определения пространственных координат точек по дополнительному фотоснимку Р производят построение модели по стереопаре, составленной из цифрового эквивалентного фотоcHHiwa и дополнительного фотоснимка При внешнем Ориентирован ии построенной модели в качестве опор- ных точек используют контурные;точки цифрового Эквивалентного фотоснимка. . . . В связи с.тем,.что определение пространственных координат, точек, не изобразившихся на основных фотоснимках, выполняется с использованием цифрового эквивалентного фотоснимка, составляющего с дополни- . тельным стереопару, дополнительные фотоснимки того же или нового фотографирования . местности могут иметь различные параметры и любое значение продольного перекрытия. Предлагаемый способ дает возможность использовать информацию в виде пространственных координат точек местности, полученную по основным фотоснимкам, в качестве опорной при фотограмметрической обработке фотоснимков повторного фотографирования , что способствует ка- чественному и оперативному выполнению .работ по созданию и исправлению топографических карт, планов, фотокарт, более эффективному использованию, имеющихся фотогрс1мметрических приборов для совместной обработки фотоснимков с разными параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| Способ определения координат точек местности | 1977 |
|
SU705257A1 |
| АНАЛИТИЧЕСКИЙ ФОТОКАРТОГРАФ ДЛЯ СОСТАВЛЕНИЯ ФОТОКАРТ ПО СТЕРЕОСКОПИЧЕСКИМ СНИМКАМ | 1970 |
|
SU285256A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА МЕСТНОСТИ | 1995 |
|
RU2101677C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ обновления карты,созданной по аэрофотоснимкам | 1984 |
|
SU1216648A1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| СПОСОБ АНАЛИТИЧЕСКОГО ТРАНСФОРМИРОВАНИЯ АЭРОСНИМКОВ | 1972 |
|
SU349891A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ТОЧЕК МЕСТНОСТИ, включающий сканирование основ ных фотоснимков, построение по стереопаре основных фотоснимков геометрической модели, формирование цифрового эквивалентного снимка и определение пространственных координат точек местности, изобразившихся на дополнительных фотоснимках; о т л и ч а ю щ и и с я тем, что, с целью определения пространственных координат точек местности на дополнительных фотоснимках с. продольными перекрытиями менее 50%, в том числе и по одиночным фотоснимкам, из меряют оптические плотности точек одного из фотоснимков, формирование цифрового эквивалентного снимка осуществляют по координатам и оптическим плотностям соответствующих точек геометрической модели основных фотоснимков, а координаты точек местности определяют по геометрической модели стереопары, составленной из цифрового эквивгшентного и 9 |сл дополнительного снимков, ориентированной по пространственным координатам точек цифрового эквивгшентного снимка.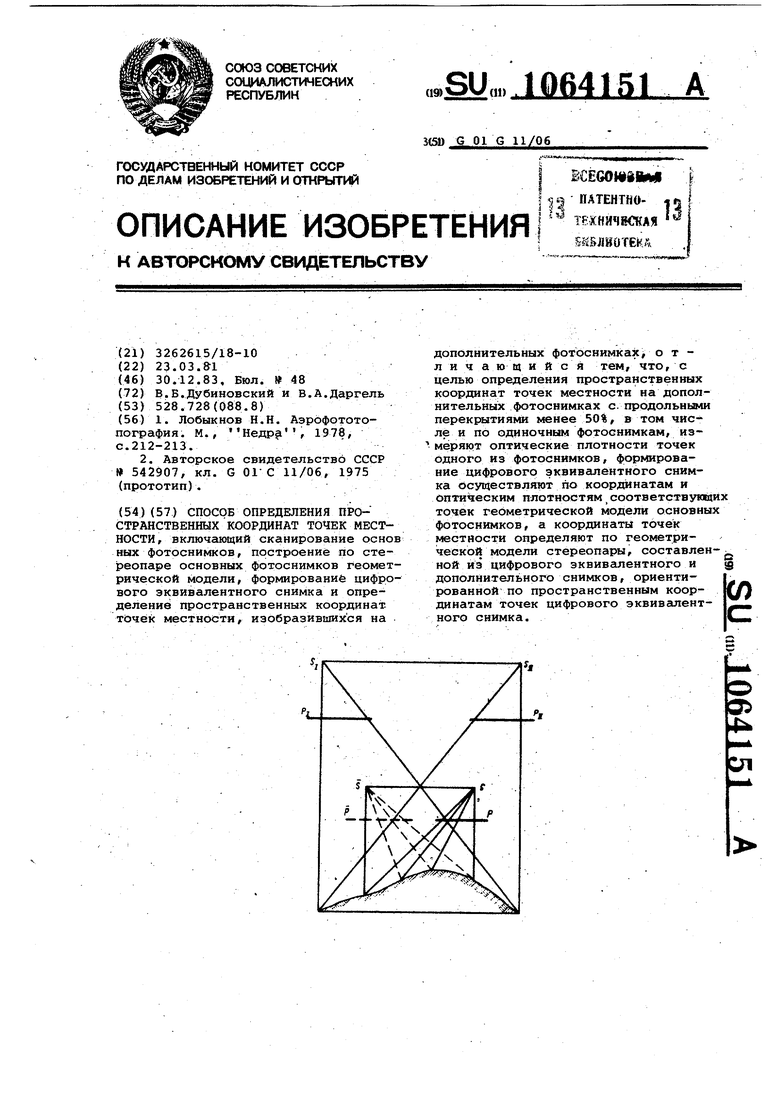
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лобыкнов Н.Н | |||
| Аэрофототопография | |||
| М., , 1978, с.212-213 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ стереоскопической съемки рельефа на универсальном стереофотограмметрическом приборе | 1975 |
|
SU542907A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
