Изобретение относится к области фотограмметрии и может быть использовано при обновлении цифровых карт местности, электронных карт, цифровых моделей местности и топографических карт.
Известен способ определения элементов ориентирования снимка местности по однозначно опознанным опорным точкам, выбранным на характерных элементах изображения снимка и топографической карты (Лобанов А.Н. Фотограмметрия, М.: Недра, 1984).
Задача определения элементов ориентирования снимка этим способом осложняется или вообще не решается при недостаточном количестве визуально отождествленных опорных точек, выбранных на "твердых" контурах.
Указанного недостатка лишен способ определения элементов ориентирования по точкам контурных линий топографической карты, не имеющим характерных деталей. В процессе выполнения каждого цикла уточнения элементов ориентирования снимка одна из опорных точек на какой-либо из контурных линий топографической карты принимается за вспомогательную, а ее координаты не используются при уточнении элементов ориентирования снимка в этом цикле (см. заявку о выдаче патента на изобретение N 93-000651/28).
Координаты вспомогательной точки на снимке рассчитывают по приближенным значениям элементов ориентирования и координатам опорной точки на контурной линии топографической карты.
Далее выполняют аналитический перенос вспомогательной точки на соответствующую ей точку контурной линии снимка, минимально отстоящую от положения вспомогательной точки в системе координат снимка.
После этого уточняют элементы ориентирования снимка с использованием координат точки, полученной после переноса. Уточнение элементов ориентирования повторяют с использованием всех точек, выбранных на контурных линиях снимка.
Процесс определения элементов ориентирования с помощью этого способа требует предварительного шифрования контурных линий снимка, на которых выбраны опорные точки, что приводит к снижению производительности этого способа.
Задачей предложенного способа является устранение этого недостатка за счет автоматизированного использования информации о координатах топографических объектов и рельефе местности, содержащейся в цифровых картах местности (ЦКМ), например в электронных картах или в цифровых моделях местности.
Сущность предложенного способа определения элементов ориентирования снимка заключается в том, что в способ определения элементов ориентирования снимка местности, включающий выбор на снимке четырех опорных точек, из которых по крайней мере первая и вторая точки выбраны на контурных линиях снимка, измерение координат этих четырех точек на снимке, обработку результатов измерений, при которой находят предварительные значения элементов ориентирования снимка, включены операции выбора на контурных линиях ЦКМ соответствующих контурным линиям снимка точек приближенно отождествленных с опорными точками снимка, уточнение элементов ориентирования по соответствующим координатам второй, третьей и четвертой пар точек снимка и ЦКМ, определения положения вспомогательной точки в системе координат ЦКМ по координатам первой опорной точки снимка и предварительным значениям элементов ориентирования, а в случае несовпадения ее с соответствующей контурной линией ЦКМ перенос ее на точку контурной линии ЦКМ, минимально отстоящую от вспомогательной точки, последовательного повторения операций по уточнению элементов внешнего ориентирования снимка для каждой точки, выбранной на контурных линиях и принимаемой за вспомогательную, до получения значений элементов ориентирования снимка, при которых каждая из точек снимка, выбранных на его контурных линиях, совпадает после переноса их в на ЦКМ с ее контурными линиями.
Использование предложенного способа не ограничивается наличием характерных деталей на контурных линиях снимка и ЦКМ и однозначно опознанных на фотоснимке и ЦКМ изображений компактных объектов.
Реализация способа позволяет определять элементы ориентирования без точного первоначального отождествления опорных точек фотоснимка с соответствующими точками на ЦКМ и не требует оцифровки контурных линий снимка, что в совокупности существенно снижает затраты времени на определение элементов ориентирования снимка местности.
Так как на контурных линиях, отображенных на карте и снимке местности, может быть выбрано практически неограниченное количество точек, то это обстоятельство позволяет минимизировать влияние случайных ошибок измерений, что повышает точность определения элементов ориентирования снимка местности.
Наряду с таким точками предложенный способ позволяет при определении элементов ориентирования снимка местности использовать и надежно опознанные и отождествленные точки снимка и ЦКМ.
Предложенный способ может быть в частности использован при определении элементов внешнего ориентирования (ЭВО) снимка местности.
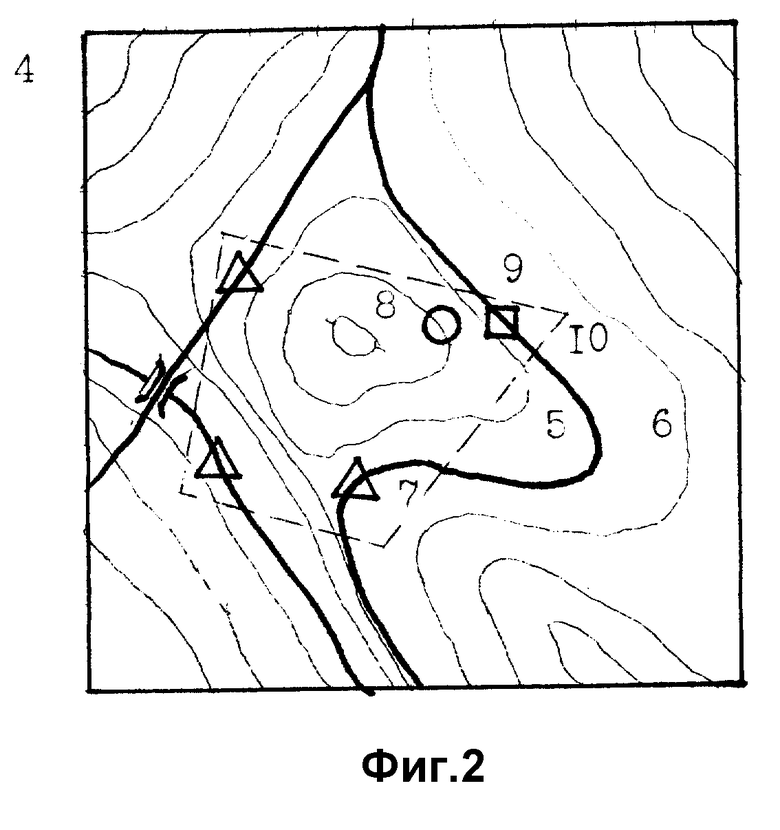
На фиг. 1 схематически представлен снимок местности.
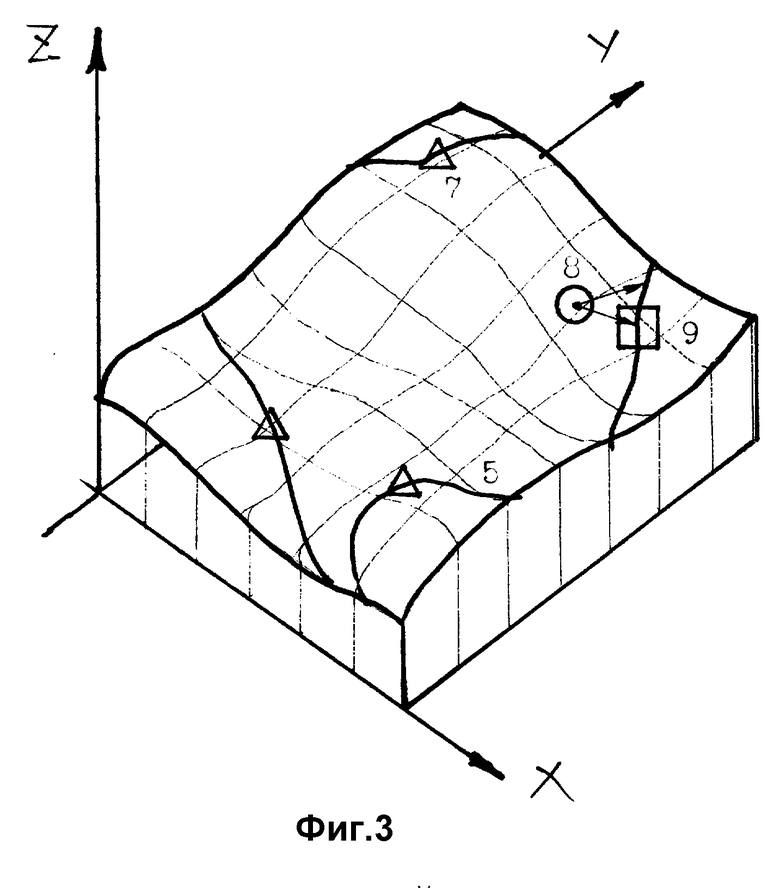
На фиг. 2 показан фрагмент цифровой карты местности (ЦКМ), выведенный на экран дисплея.
На фиг. 3 изображено аксометрическое представление фрагмента ЦКМ, например на экране дисплея.
На снимке 1 (фиг.1) утолщенными линиями 2 показаны его линейные контуры. Кружками 3 на этих контурах отображено положение точек, выбранных оператором в качестве опорных.
На ЦКМ 4 (фиг.2) утолщенными линиями 5 показаны контуры, которые не изменились на местности.
Рельеф местности на этом рисунке представлен горизонталями 6, хотя в одном из сегментов ЦКМ эта информация чаще всего хранится в матричной форме.
Треугольниками 7 выделены три опорные точки на контурных линиях ЦКМ, принятые в первом приближении за опорные.
Кружком 8 показано положение опорной точки 3 (фиг. 1) снимка 1 после ее переноса в систему координат ЦКМ (фиг. 2, 3), а квадратом 9 обозначена точка контурной линии ЦКМ, находящаяся на минимальном удалении от точки 8. Штрихпунктирной линией 10 обозначены границы снимка, спроецированные в пространство ЦКМ.
Аксометрическое представление фрагмента ЦКМ (фиг. 3) дает более наглядное представление о пространственном положении точек.
При определении элементов внешнего ориентирования снимка (ЭВО) снимка 1 (фиг. 1) выполняют его привязку к ЦКМ (фиг. 2) по сохранившимся на местности контурным линиям и изображениям топографических объектов.
Измеряют координаты не менее четырех опорных точек 3 (фиг. 1) снимка 1, из которых по крайней мере первая и вторая точки должны находится на линейных контурах снимка 1. Выбор этих точек на линейных контурах снимка регламентируется лишь их взаимным расположением.
Например, выбранные опорные точки не должны лежать на одной прямой, находится в пределах фрагмента снимка с достаточно высокими измерительными характеристиками, расстояния между ними по возможности должны быть максимальными и т.д. Перечисленные условия необходимы для обеспечения наилучшей сходимости вычислений и точности определения ЭВО снимка 1.
На графических элементах содержания ЦКМ (фиг. 2) отмечают топографические объекты, содержащие опорные точки в том порядке, в котором выполнялись измерения снимка. Номера этих объектов вводят в память ЭВМ. Выбранные изображения топографических объектов на экране дисплея могут быть выделены цветом, оптической плотностью, пунктиром и т.д.
Далее формируется начальный вариант из трех пар исходных опорных точек, из которых хотя бы одна пара должна находиться на контурных линиях, а одна точка, расположенная на контурной линии снимка, осталась неиспользованной.
По координатам опорных точек 3 (фиг. 1), находящимся на снимке 1, координатам точек ЦКМ и по приближенным элементам и его ориентирования выполняется уточнение ЭВО снимка. Приближенные значения ЭВО могут быть заранее заданны эмпирически, либо определены во время выполнения фотосъемки местности, а координаты точек ЦКМ автоматически выбраны по присвоенным номерам ее объектов.
Уточнение ЭВО снимка выполняется путем формирования системы линейных уравнений и последующего ее решения. В результате этих действий находятся предварительные значения ЭВО.
Вычисления выполняются с использованием приведенного ниже математического аппарата (зависимости 1) (Лобанов А.Н. Аэрофототопография. М.: Недра, 1980, с. 267).
где
σx0...σκ - поправки к приближенным значениям элементов внешнего ориентирования снимка;
(x), (y) - расчетное положение опорной точки, вычисленное по приближенным значениям ЭВО.
Частные производные по соответствующим элементам внешнего ориентирования вычислены по формулам (2)



Z*=a3(X-X0)+b3(Y-Y0)+c3 (Z-Z0;
где
х, y - координаты опорных точек снимка;
f, x0 и y0 - фокусное расстояние и координаты главной точки снимка;
X, Y и Z - координаты точек ЦКМ;
X0, Y0 и Z0 - линейные ЭВО снимка;
α,ω,κ - угловые ЭВО снимка;
a1. . . ..c3 - направляющие косинусы угловых ЭВО вычисляемые по формулам (3)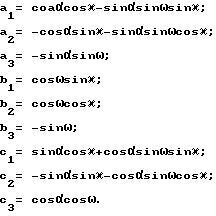
После выполнения этих действий по полученным значениям ЭВО и координатам точки, неиспользованной при уточнении ЭВО снимка (расположенной на контурной линии) находятся координаты Xi, Yi и Zi этой точки в системе координат ЦКМ (фиг. 2 и 3).
Известен способ решения этой задачи итерационным методом (Лобанов А.Н., Журкин И.Г. Автоматизация фотограмметрических процессов. М.: Недра, 1980, с. 192).
При реализации этого метода первоначально полагают:
Zi = ZN
где
ZN - средняя высота ЦКМ.
Далее находятся предварительные координаты точки снимка в системе координат ЦКМ по формулам (5)

где
Xi, Yi, Zi - координаты точек в системе координат ЦКМ;
X0, Y0, Z0 - координаты центра съемки;
α,ω,κ - угловые элементы внешнего ориентирования снимка.
Далее по координатам Xi и Yi выполняется выборка нового значения Zi из матрицы высот ЦКМ, а по формулам (5) уточняются эти координаты.
После того как итерационный процесс сойдется при заданном допуске находятся отстояния Di полученной точки ЦКМ от соответствующей контурной линии по формуле (6)
где
k + 1, 2, 3, ... N;
где
Xk, Yk и Zk - координаты точек контурной линии ЦКМ.
По формуле (7) находится минимальное отстояние Dmin полученной точки от контурной линии ЦКМ.
Dmin = min (D1, D2,...DN).
Точка контурной линии ЦКМ, для которой отстояние Dk минимальное, принимается за опорную. По ее координатам и координатам еще двух пар опорных точек продолжается процесс уточнения ЭВО снимка.
Описанные действия выполняются до тех пор, пока допустимые отстояния Dmin точек ЦКМ не будут лежать в заданных пределах.
Процесс определения ЭВО выполняется с использованием всех выбранных опорных точек карты. Окончательные значения ЭВО находятся с использованием метода наименьших квадратов.
Предложенный способ позволяет определять элементы ориентирования не только фотоснимков на бумаге, пленке, либо другой твердой основе, но и снимков, полученных в цифровой форме непосредственно во время съемки.
Элементы ориентирования снимка, определенные с помощью предложенного способа, могут быть использованы при решении разнообразных фотограмметрических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА МЕСТНОСТИ | 1995 |
|
RU2101677C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ | 1993 |
|
RU2082093C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| Способ определения элементов ориентирования фотоснимка местности | 1990 |
|
SU1770744A1 |
| СПОСОБ ОБНОВЛЕНИЯ ЦИФРОВОЙ КАРТЫ МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2001 |
|
RU2226262C2 |
| СПОСОБ АКТУАЛИЗАЦИИ ЦИФРОВОЙ КАРТЫ МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2246695C2 |
| Способ определения координат точек местности | 2024 |
|
RU2831494C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОПОРНЫХ ТОЧЕК НА КОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ МЕСТНОСТИ ПРИ ОТСУТСТВИИ ПАРАМЕТРОВ ГЕОГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2021 |
|
RU2768219C1 |
Изобретение относится к фотограмметрии и может быть использовано при обновлении цифровых карт местности (ЦКМ) и решении различных фотограмметрических задач. Согласно способу выбирают на снимке местности четыре опорные точки, из которых по меньшей мере две расположены на контурных линиях. Находят на ЦКМ точки, приближенно соответствующие выбранным опорным точкам. Уточняют элементы ориентирования снимка по координатам трех пар опорных точек ЦКМ и снимка. По координатам одной из точек снимка, расположенной на контурной линии, определяют положение соответствующей ей вспомогательной точки на ЦКМ. При несовпадении полученной точки с контурной линией ЦКМ переносят эту точку на точку контурной линии, минимально отстоящую от полученной. Уточняют элементы ориентирования снимка по новой комбинации точек. Способ позволяет обрабатывать фотоснимки при отсутствии характерных точек на деталях фотоизображений, а также повысить производительность определения элементов ориентирования. 3 ил.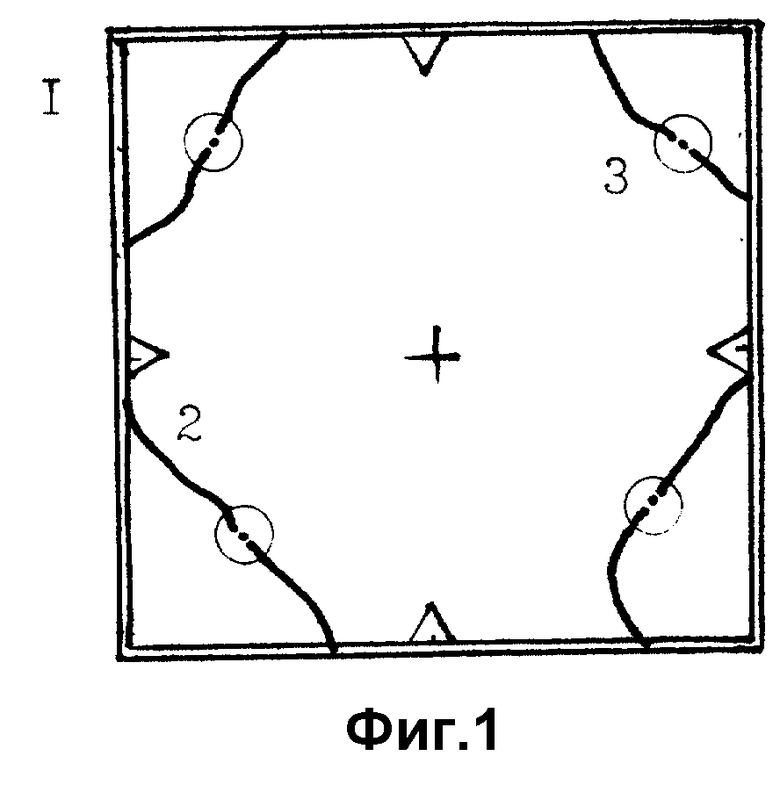
Способ определения элементов ориентирования снимка местности, включающий выбор на нем четырех опорных точек, из которых по крайней мере первая и вторая точки выбраны на контурных линиях снимка, измерение координат опорных точек снимка, обработку результатов измерений, при которой предварительно задают, а затем последовательно уточняют элементы ориентирования снимка, нахождение положения вспомогательной точки по уточненным элементам ориентирования снимка, отличающийся тем, что находят на цифровой карте местности изображения объектов, соответствующие изображениям этих объектов на снимке и содержащие выбранные опорные точки, находят на цифровой карте местности точки, приближенно соответствующие изображениям опорных точек на снимке, считывают координаты этих точек, уточняют элементы ориентирования снимка по координатам второй, третьей и четвертой пары точек цифровой карты местности и снимка, определяют по полученным значениям элементов ориентирования снимка и координатам первой точки снимка пространственное положение соответствующей ей вспомогательной точки в системе координат цифровой карты местности, сопоставляют полученную вспомогательную точку с точками соответствующей контурной линии цифровой карты местности, переносят эту вспомогательную точку на точку контурной линии цифровой карты местности, минимально отстоящую от вспомогательной точки, повторяют операции по уточнению элементов ориентирования снимка, пока не будет достигнуто совпадение вспомогательных точек с контурными линиями цифровой карты местности при заданном допуске на точность совпадения точек, принимая каждую из опорных точек снимка, расположенных на контурных линиях, за первую.
| RU 93000651/28, 27.02.95 | |||
| СПЛАВ НА ОСНОВЕ МЕДИ | 0 |
|
SU177074A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ВНУТРЕННЕГО И ВНЕШНЕГО ОРИЕНТИРОВАНИЯ | 0 |
|
SU307267A1 |
