Изобретение относится к фотограмметрии и может быть использовано при создании и обновлении топографических карт.
Известны стереофотограмметрические приборы, в которых отслеживание контуров выполняют с помощью столика с измерительной маркой. К приборам такого типа относится двойной проектор Матра (Франция) [1]
Точность ручного перемещения измерительного столика в этих приборах не превышает 0,1 мм, что существенно ограничивает область использования приборов такого типа.
Указанного недостатка лишен стереоприбор, в котором позиционирование снимков относительно наблюдательной системы выполняется с помощью винтов, а считывание координат точек осуществляется посредством кодирования углов поворота этих винтов аналого-цифровыми преобразователями "угол-код" [2]
Управление позиционированием снимков может выполняться с помощью ручных штурвалов или электропривода и ножными педалями.
Педали управляют электромагнитными муфтами, отключающими измерительные винты перемещения кареток с целью раздельного позиционирования снимков относительно наблюдательной системы.
Недостатком известного устройства является наличие трех независимых органов управления движениями кареток с фотоснимками: двух штурвалов или дублирующих их электроприводов и педали. Это требует от оператора координации собственных управляющих движений и к тому же у него постоянно заняты обе руки.
Стереоскопическое отслеживание контурных линий с помощью этого прибора затруднено из-за отсутствия автоматической коррекции поперечных параллаксов и дискретного характера управляющих воздействий на каретки при совмещении измерительной марки по высоте со стереомоделью местности, построенной по фотоснимкам.
Целью изобретения является повышение точности и производительности отслеживания контурных линий фотоснимков и рельефа местности, измерения координат точек фотоснимков и стереомодели местности.
Сущность изобретения заключается в том, что аналитический стереофотограмметрический прибор, содержащий блок обработки с регистратором координат точек фотоснимков, узел размещения стереопары фотоснимков с первой и второй каретками, следящий электропривод перемещения первой каретки, следящий электропривод перемещения второй каретки, оптическую систему с узлами формирования измерительной марки, блок задания пространственных координат точек фотоснимков с первым и вторым механическими приводами, выполненными в виде педали и штурвала соответственно, и блок управления следящими электроприводами, дополнительно имеет вторые следящие электроприводы перемещения первой и второй каретки, а оптическая система включает узел формирования марки-указателя со следящим электроприводом разворота изображения марки-указателя относительно центра измерительной марки, блок задания пространственных координат точек фотоснимков дополнительно содержит третий механический привод, выполненный в виде цилиндра, и три угловых преобразователя, валы которых соединены с осями вращения соответствующих механических приводов, блок управления следящими электроприводами состоит из синусного и косинусного преобразователей, первого и второго блоков умножения с выходными регистрами сумматора с выходным регистром, причем выход третьего углового преобразователя соединен с первым входом сумматора, выходной регистр которого соединен со входом первого следящего электропривода перемещения второй каретки и первым входом блока обработки, выход второго углового преобразователя соединен со входами синусного и косинусного преобразователей и входом следящего электропривода разворота изображения марки-указателя, выход синусного преобразователя соединен с первым входом блока умножения, выходной регистр которого соединен со вторым входом блока умножения и входом второго следящего электропривода перемещения первой каретки, выход косинусного преобразователя соединен с первым входом второго блока умножения, выходной регистр которого соединен с третьим входом блока обработки, входом первого следящего электропривода перемещения первой каретки и входом сумматора, выход первого преобразователя соединен со вторыми входами первого и второго блоков умножения, выход блока обработки соединен с входом второго следящего электропривода перемещения второй каретки, второй механический привод снабжен второй осью, жестко связанной с третьим механическим приводом, причем эта ось перпендикулярна первой оси второго механического привода, установленного с возможностью поворота в плоскости, перпендикулярной второй его оси и совместно с этой осью, первые и вторые следящие электроприводы выполнены с обеспечением перемещения первой и второй кареток соответственно по осям абсцисс и ординат.
Предложенное техническое решение сокращает количество органов управления перемещения кареток аналитического стереофотограмметрического прибора. Практически остаются лишь два органа управления каретками штурвал и педаль, что позволяет освободить одну из рук оператора для выполнения вспомогательных операций, таких как включение и выключение регистра координат блока обработки.
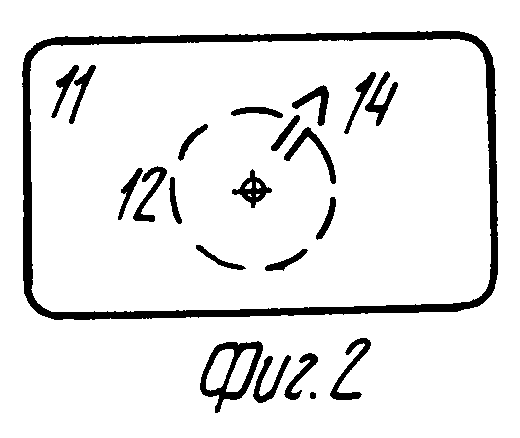
На фиг. 1 представлена принципиальная схема аналитического стереофотограмметрического прибора; на фиг.2 возможный вариант исполнения пространственной измерительной марки и марки-указателя.
Аналитический стереофотограмметрический прибор содержит узел размещения стереопары фотоснимков с первой и второй каретками 1, следящие электроприводы 2, перемещение кареток 1 по осям абсцисс и ординат, оптическую систему с зеркалами 3, объектами 4, поляроидами 5, зеркалом 6, полупрозрачным зеркалом 7, объективом 8, зеркалом 9, выполненным полупрозрачным, зеркалом 10, экраном 11, узлом формирования пространственной измерительной марки 12 (фиг. 2), выполненной гравировкой на экране 11 (фиг.1 и 2), узлом формирования марки-указателя, включающим: непрозрачную пластину 13 (фиг.1) с маркой-указателем 14 (фиг.2), выполненной прозрачной, осветителем 15 (фиг.1) марки-указателя 14, блок поворота марки-указателя, содержащий: призму 16 (Пехана), редуктор 17 и следящий электропривод 18 разворота изображения марки-указателя 14 (фиг.2) относительно центральной точки пространственной измерительной марки 12; узел управления (фиг.1) первым, вторым и третьим следящими электроприводами 2, блок задания пространственных координат точек, содержащий штурвал 19 с угловым аналого-цифровым преобразователем 20 и цилиндр 21 с угловым преобразователем 22 и педаль 23 с аналоговым преобразователем 24, блок обработки с узлом управления первым, вторым и третьим электроприводами 2, включающий синусный преобразователь 25, косинусный преобразователь 26, первый и второй блоки 27 умножения с выходными регистрами 28, сумматор 29, снабженный выходным регистром 30, вычислительный блок 31 фотограмметрической обработки информации, поступающей с выходных регистров 28 и 30 прибора с регистра координат 32 и интерфейсом 33 ввода-вывода информации, корпус 34 с подшипниками 35 и осью 36.
Выход углового аналого-цифрового преобразователя 20 прибора соединен со входами следящего электропривода 18, синусного преобразователя 25 и косинусного преобразователя 26.
Выход аналого-цифрового преобразователя 24 соединен со вторыми входами первого и второго блоков умножения, первые входы которых соединены соответственно с выходами синусного 25 и косинусного 26 преобразователей сигнала, поступающего с аналого-цифрового преобразователя 24.
Аналитический стереофотограмметрический прибор работает следующим образом. Изображения фотоснимков, расположенных на каретках 1, проектируются объектами 4 через зеркала 3, поляроиды 5, полупрозрачное зеркало 7, объектив 8, зеркало 9, полупрозрачное зеркало 10 на экран 17. Зеркало 6 направляет изображение фотоснимка, расположенного на левой каретке 1, к полупрозрачному зеркалу 7.
Изображения фотоснимков на экране 11 оператор рассматривает через очки с поляризационными фильтрами (очки не показаны).
После взаимного ориентирования стереопары фотоснимков местности через очки можно наблюдать стереоскопическую модель местности. При отслеживании контурных линий или рельефа оператора совмещает со стереомоделью измерительную марку путем изменения положения кареток 1 прибора 7. Для этой цели он разворачивает и наклоняет штурвал 19 и нажимает педаль 23.
Развороты штурвала 19 приводят к формированию цифрового сигнала на выходе аналого-цифрового преобразователя 20. Этот сигнал пропорционален углу поворота штурвала 19 и поступает одновременно на первый вход синусного преобразователя 25, первый вход косинусного преобразователя 26 и на вход следящего электропривода 18, который через редуктор 17 осуществляет разворот призмы 16. Редуктор 17 предназначен для согласования углов поворота штурвала 19 и марки-указателя 14 (фиг.2) с учетом удвоенной скорости разворота изображений призмой 16 (Пехана).
При поворотах штурвала 19 оператор будет наблюдать развороты изображений марки-указателя 14 вокруг центра измерительной марки 12 в пространстве стереоскопической модели местности.
Измерительная марка 12 в этом пространстве сохранит свое положение при поворотах штурвала 19 без его наклона (фиг.1), хотя на выходах синусного и косинусного преобразователей 25,26 автоматически формируются сигналы, пропорциональные соответственно синусу и косинусу угла поворота штурвала 19.
При нажатии на педаль связанный с ней аналого-цифровой преобразователь 24 формирует на вторых входах блоков умножения 27 сигнал, пропорциональный желаемой скорости измерительной марки по стереомодели местности. В выходных регистрах 28 блоков умножения 27 при нажатой педали 24 формируются сигналы, пропорциональные приращениям координат кареток 1 прибора.
Следящие электроприводы 2 этой каретки смещают ее в соответствии с сигналами на выходах регистров 28 блоков умножения 27. Кроме входа следящего электропривода 2 сигнал, пропорциональный смещению первой каретки 1 прибора, поступает на второй вход сумматора 29, который с учетом разворота оператором цилиндра 21 формирует в выходном регистре 30 сигнал, пропорциональный смещению второй каретки 1 прибора по направлению оси абсцисс.
Наклонами штурвала 19 оператор может устранять несовмещения измерительной марки прибора со стереомоделью в точке наблюдения (по высоте).
При работе аналитического стереофотограмметрического прибора сигналы с выходных регистров 28 блоков умножения 27 и выходного регистра 30 сумматора 29 поступают не только на входы вычислительного блока 31 фотограмметрической обработки инфориации 7, снабженным регистратором координат 32 и интерфейсом 33 ввода-вывода информации и стереомодели местности, например для ее графического отображения на каких-либо периферических устройствах.
В вычислительном блоке 31 фотограмметрической обработки информации по априорно известным элементам взаимного ориентирования фотоснимков стереопары определяется ордината точки второго фотоснимка, свободная от поперечного параллакса.
Вычисления в этом блоке 31 выполняются по формулам 1 и 2, известным из технической литературы (а.с. СССР N 1800267, кл. G 01 C 11/06).
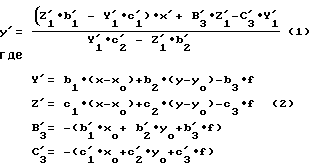
x, Y, x' и Y' прямоугольные координаты точек первого и второго фотоснимков стереопары;
f, x0 и y0 фокусное расстояние и координаты главных точек фотоснимков стереопары;
b1, c1 направляющие косинусы, априорно вычисленные по известным угловым элементам взаимного ориентирования фотоснимков стереопары.
направляющие косинусы, априорно вычисленные по известным угловым элементам взаимного ориентирования фотоснимков стереопары.
Следящий электропривод 2 перемещений второй каретки 1 прибора по направлению оси ординат смещает эту каретку в соответствии с зависимостью (1), и тем самым устраняются поперечные двоения точек стереомодели местности в поле зрения оптической системы.
Синусный и косинусный преобразователи, блоки умножения, сумматор и вычислительный блок фотограмметрической обработки информации содержат лишь электронные компоненты и поэтому могут быть реализованы в виде большой интегральной схемы, позволяющей выполнять параллельные вычисления или микро-ЭВМ, поступающих с аналого-цифровых преобразователей, и последовательное формирование сигналов управления следующими электроприводами.
Предложенный аналитический стереофотограмметрический прибор позволяет отслеживать как рельеф, так и контурные линии объектов местности. При отслеживании контуров фотоснимков стереопары размещают на каретках прибора, ориентируют их по шести стандартно расположенным точкам, например с помощью стандартной ЭВМ, подключенной к интерфейсу ввода-вывода информации 7. Эти данные вводятся в вычислительный блок фотограмметрической обработки информации прибора, в котором формируются сигналы управления электроприводами кареток 7. После того как в ходе взаимного ориентирования будут устранены поперечные двоения изображений штурвалов, можно развернуть изображение марки-указателя по направлению текущего вектора отслеживаемого контура и начать его отслеживание.
Перемещение измерительной марки будет совпадать с отслеживанием контуров, и оператору не надо начинать этот процесс с выбора направления движения марки методом проб. В зависимости от индивидуальных особенностей оператора он по своему желанию может регулировать скорость отслеживания контура с учетом сложности рельефа и отслеживаемого контура. Это позволяет выбирать оптимальные режимы обработки сретеопары фотоснимков как по точности, так и по производительности выполнения работ. Разворотами и наклонами штурвала при регулировании скорости движения педалью оператор может управлять двумя каретками аналитического стереофотограмметрического прибора, отслеживая при этом пространственной маркой на фотоснимках стереопары контурные линии местности в точном соответствии с ее рельефом.
Учет рельефа местности и направления контуров на фотоснимках стереопары с помощью одного органа управления (штурвала) значительно повышает эргономические характеристики прибора и тем самым повышает производительность отслеживания контуров.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| Аналитический стереофотограмметрический прибор | 1991 |
|
SU1800267A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА МЕСТНОСТИ | 1995 |
|
RU2101677C1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Универсальный стереофотограмметрический прибор | 1976 |
|
SU567955A1 |
| Способ отображения рельефа местности | 1984 |
|
SU1278578A1 |
| Способ стереоскопического измерения координат точек фотоснимков | 1975 |
|
SU551504A1 |
| БКБ-ГКО-ГГ-Л | 1966 |
|
SU187323A1 |
| Автоматический стереофотограмметрический прибор | 1988 |
|
SU1585683A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ СНИМКА МЕСТНОСТИ | 1996 |
|
RU2124181C1 |
Использование: фотограмметрия, при создании и обновлении цифровых и топографических карт. Сущность изобретения: аналитический стереофотограмметрический прибор включает стереокомпаратор, снабженный маркой-указателем направления смещения пространственной измерительной марки и следящими электроприводами, блок обработки и три угловых преобразователя перемещений механических приводов, выполненных в виде штурвала и педали и предназначенных для управления смещениями изображений марок и фотоснимков стереопары. Для сокращения числа органов управления прибором механический привод выполнен в виде штурвала снабженного второй осью, жестко связанной с механическим приводом одного из трех угловых преобразователей. 2 ил.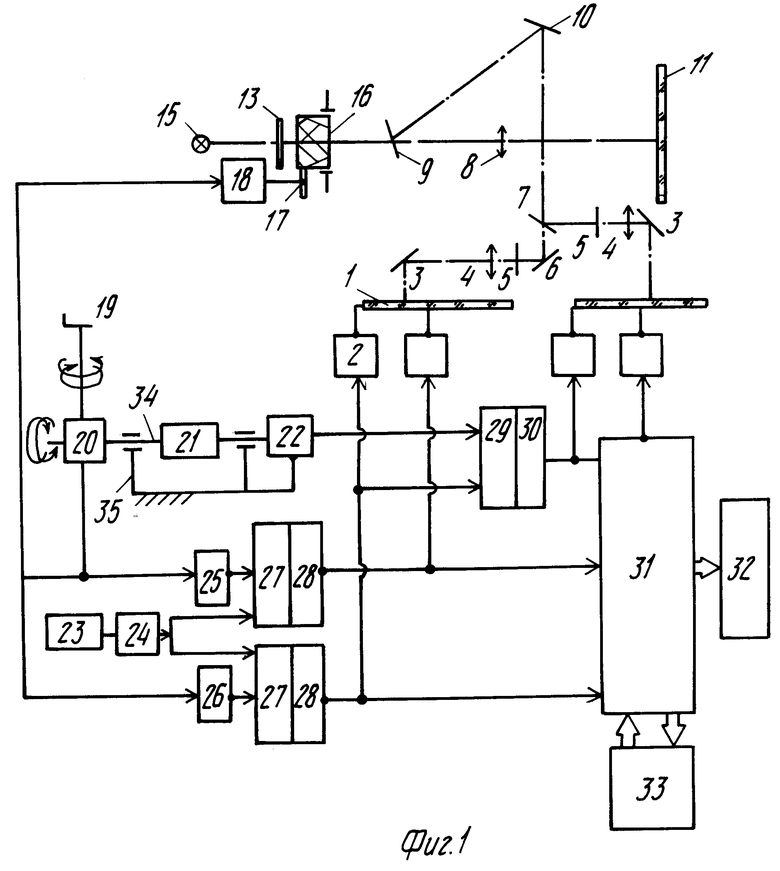
Аналитический стереофотограмметрический прибор, содержащий блок обработки с регистратором координат точек фотоснимков, узел размещения стереопары фотоснимков с первой и второй каретками, следящий электропривод перемещения первой каретки, следящий электропривод перемещения второй каретки, оптическую систему с узлами формирования измерительной марки, блок задания пространственных координат точек фотоснимков с первым и вторым механическими приводами, выполненными в виде педали и штурвала соответственно, и блок управления следящими электроприводами, отличающийся тем, что дополнительно содержит вторые следящие электроприводы перемещения первой и второй кареток, оптическая система дополнительно содержит узел формирования марки-указателя со следящим электроприводом разворота изображения марки-указателя относительно центра измерительной марки, блок задания пространственных координат точек фотоснимков дополнительно содержит третий механический привод, выполненный в виде цилиндра, и три угловых преобразователя, валы которых соединены с осями вращения соответствующих механических приводов, блок управления следящими электроприводами состоит из синусного и косинусного преобразователей, первого и второго блоков умножения с выходными регистрами и сумматора с выходным регистром, причем выход третьего углового преобразователя соединен с первым входом сумматора, выходной регистр которого соединен с входом первого следящего электропривода перемещения второй каретки и первым входом блока обработки, выход второго углового преобразователя соединен с входами синусного и косинусного преобразователей и входом следящего электропривода разворота изображения марки-указателя, выход синусного преобразователя соединен с первым входом первого блока умножения, выходной регистр которого соединен с вторым входом блока умножения и входом второго следящего электропривода перемещения первой каретки, выход косинусного преобразователя соединен с первым входом второго блока умножения, выходной регистр которого соединен с третьим входом блока обработки, входом первого следящего электропривода перемещения первой каретки и вторым входом сумматора, выход первого углового преобразователя соединен с вторыми входами первого и второго блоков умножения, выход блока обработки соединен с входом второго следящего электропривода перемещения второй каретки, второй механический привод снабжен второй осью, жестко связанной с третьим механическим приводом, причем эта ось перпендикулярна первой оси второго механического привода, установленного с возможностью поворота в плоскости, перпендикулярной второй его оси и совместно с этой осью, первые и вторые следящие электроприводы выполнены с обеспечением перемещения первой и второй кареток соответственно по осям абсцисс и ординат.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лобанов А.Н | |||
| Фотограмметрия | |||
| - М.: Недра, 1984, с | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТРАНЕНИЯ СКОЛЬЖЕНИЯ КОЛЕС АВТОМОБИЛЕЙ | 1920 |
|
SU292A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 194333, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
