Изобретение относится к электротехнике и может быть использовано в приводах с частотно-токовым управлением, в частности в линейном приводе переменного тока.
Известен электропривод с частотно-токовым управлением, содержащий синхронный двигатель с установленным на его валу фазовращателем и вспомогательным датчиком положения, фазочувствительный выпрямитель, выход которого подключен через управляемый источник питания к фазным обмоткам двигателя, задающий генератор, первый выход которого подключен к фазным обмоткам фазовращателя, а второй к первым входам фазочувствительного выпрямителя, выход фазовращателя подключен к входу формирователя коротких импульсов, выход которого подключен через делитель частоты с запрещающим входом к второму входу фазочувствительного выпрямителя, узел сравнения, первый вход которого подключен к выходу вспомогательного датчика положения, второй вход к выходу вспомогательного датчика положения, второй вход к выходу фазочувствительного выпрямителя, а выход к запрещающему входу делителя частоты [1]
В известном устройстве используют фазовращатель с коэффициентом электрической редукции больше коэффициента электрической редукции двигателя.
Недостатком известного электропривода является сложность реализации.
Наиболее близким к предлагаемому является электропривод с частотно-токовым управлением, содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход к входу датчика положения, блок задания фазный токов, выходы которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходовой сумматор, блок задания начальной фазы [2]
Электропривод также содержит фазосмещающий блок, регистр, счетчик, демультиплексор, нуль-орган, преобразователь напряжение-частота.
В известном устройстве используют в качестве датчика положения ротора двигателя фазовращатель с коэффициентом электрической редукции, который равен или меньше коэффициента электрической редукции двигателя.
Недостатком известного электропривода является невозможность использования в качестве датчика положения фазовращатель с коэффициентом электрической редукции больше коэффициента электрической редукции двигателя.
Изобретение направлено на расширение области применения за счет обеспечения возможности использования в качестве датчика положения фазовращатель с коэффициентом электрической редукции как меньше, так и больше коэффициента электрической редукции двигателя.
Решение поставленной задачи достигается тем, что в электропривод с частотно-токовым управлением, содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход к входу датчика положения, блок задания фазных токов, выходу которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходовой сумматор, блок задания начальной фазы, введены преобразователь приращений периода в код, который подключен первым входом к выходу датчика положения, а вторым входом к генератору опорной частоты, накопитель приращений, который подключен входом к выходу преобразователя приращений периода в код, а выходом к первому входу двухвходового сумматора, второй вход которого подключен к блоку задания начальной фазы, функциональный преобразователь, который подключен входом к выходу двухвходового сумматора, а выходом к объединенным входам постоянных запоминающих устройств, причем функциональный преобразователь выполнен с возможностью формирования на выходе кода, представляющего собой остаток деления входного кода на делитель
где
Р1 и Р2 коэффициенты электрической редукции двигателя и датчика положения:
К и π постоянные величины.
Промышленное применение изобретения позволяет расширить область применения электропривода с частотно-токовым управлением за счет обеспечения возможности использования датчика положения с коэффициентом электрической редукции как меньше, так и больше коэффициента электрической редукции двигателя.
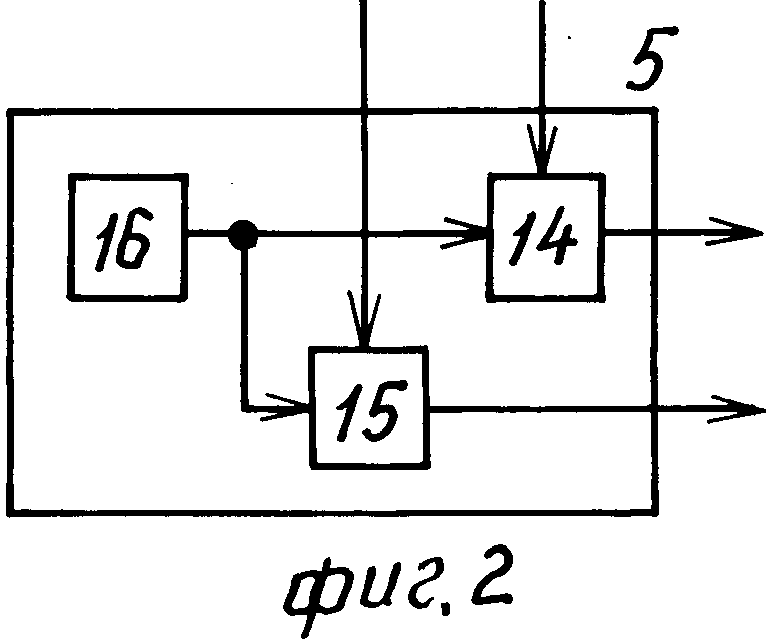
На фиг.1 представлена схема электропривода; на фиг. 2 схема блока задания фазных токов.
Электропривод содержит двигатель 1, датчик 2 положения ротора двигателя, подключенный входом к выходу источника 3 синусоидального напряжения, вход которого подключен к генератору 4 опорной частоты, блок 5 задания фазных токов, выходы которого подключены через усилитель 6 фазных токов к фазным обмоткам двигателя 1, постоянные запоминающие устройства 7, 8, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока 5 задания фазных токов, преобразователь 9 приращений периода в код, который подключен первым входом к выходу датчика 2 положения, а вторым входом к генератору 4 опорной частоты, накопитель 10 приращений, который подключен входом к выходу преобразователя 9 приращений периода в код, двухвходовой сумматор 11, который подключен первым входом к выходу накопителя 10 приращений, вторым входом к блоку 12 задания начальной фазы, а выходом через функциональный преобразователь 13 к объединенным входам постоянных запоминающих устройств 7, 8.
Блок 5 задания фазных токов содержит умножающие цифроаналоговые преобразователи 14, 15, подключенные аналоговыми входами к выходу задатчика 16 тока двигателя. Входами и выходами блока 5 являются соответственно цифровые входы и выходы цифроаналоговых преобразователей 14, 15.
Преобразователь 9 приращений периода в код может быть построен на основе сравнения количества импульсов опорной частоты, которое укладывается в периоде выходного сигнала датчика 2 положения, с постоянным числом, соответствующим количеству импульсов, которое укладывается в периоде напряжения питания датчика 2 положения.
Функциональный преобразователь 13 может быть построен на основе деления входного кода на постоянное число с использованием в качестве выходного кода остаток результата деления.
Электропривод работает следующим образом. В качестве управляемого двигателя 1 рассмотрим двухфазную синхронную машину. При управлении m-фазным двигателем усилитель 6 фазных токов выполняют m-фазным с преобразователем числа фаз на выходе. Управляемый двигатель 1 имеет коэффициент электрической редукции Р1, а датчик положения ротора двигателя используется с коэффициентом электрической редукции Р2.
Под коэффициентом электрической редукции двигателя 1 понимается отношение частот вращения поля статора и ротора двигателя. Под коэффициентом электрической редукции датчика 2 положения понимается отношение приращения фазы в его выходном сигнале к соответствующему приращению угла поворота ротора датчика.
В соответствии с частотно-токовым управлением обмотки двигателя 1 необходимо запитывать токами
где
θ угол поворота ротора двигателя;
g некоторый начальный угол;
i амплитуда фазных токов.
Фазные токи (1) вырабатывают с помощью усилителя 6, который преобразует задания фазных токов в виде напряжений в пропорциональные им токи в обмотках двигателя 1. Задания фазных токов формируют следующим образом.
Датчик 2 положения запитывают синусоидальным напряжением с частотой w. С выхода датчика 2 снимают сигнал
u∂ = usin(ωt+ϕ), (2)
где
U и ϕ амплитуда и фаза сигнала.
Причем фаза сигнала
v = p2θ+ϕo, (3)
где
ϕo некоторая начальная фаза.
Выходной сигнал (2) датчика 2 положения принимает нулевые значения, когда имеет место равенство:
ωt+ϕ = 2πi, i = 1,2,3,..., которое наступает в моменты времени
где
vi значение фазы выходного сигнала датчика 2 в моменты времени ti, i 1, 2, 3,
Отрезок времени (ti-ti-1) представляет собой период выходного сигнала датчика 2 положения, т.е.

Выходной сигнал датчика 2 поступает на первый вход преобразователя 9 приращений периода в код, на второй вход которого приходит сигнал с генератора 4 опорной частоты.
Генератор 4 опорной частоты задает частоту ω следователь, и период Т 2π/ω напряжения питания датчика 2 положения.
где
ωo и То частота и период выходных импульсов генератора 4 опорной частоты;
m целое число, m >1.
Временной интервал, на котором укладывается m периодов выходных импульсов генератора 4 опорной частоты, равен периоду напряжения питания датчика 2 положения. Следовательно, на второй вход преобразователя 9 приращений периода в код приходит сигнал, период которого определяет период напряжения питания датчика 2 положения.
Преобразователь 9 определяет приращение каждого периода выходного сигнала датчика 2 положения
ΔTi = T - Ti, i = 1,2,3,... В соответствии с (3) и (4) выходной код преобразователя 9 приращений приводится к виду
nΔ(i) = Kp2(θi- θi-1), i = 1,2,3,...,
где
К коэффициент пропорциональности.
Из этого следует, что на выходе преобразователя 9 формируется сигнал, пропорциональный приращению угла поворота ротора двигателя 1 за период выходного сигнала датчика 2 положения.
Выходной сигнал преобразователя 9 приращений поступает на вход накопителя 10, который предназначен для определения суммарного угла поворота ротора двигателя 1.
Для привязки начала координат угла поворота к начальному положению ротора двигателя 1 в начальный момент определяют код начальной фазы выходного сигнала датчика 2 положения в блоке 9 и используют его в качестве кода начальной установки накопителя 10 приращений.
На выходе накопителя 10 приращений получают код суммарного угла поворота ротора двигателя 1
Двухвходовой сумматор 11 предназначен для учета задания начальной фазы токов управления. Его выходной код
nγ(i) = Kp2(θi+ γ)
поступает на вход функционального преобразователя 13.
Выходным сигналом функционального преобразователя 13 является остаток от деления входного кода nγ(i) на постоянный код
Код n0 равен входному коду функционального преобразователя 13, соответствующему полному повороту поля статора двигателя, т.е. изменению фазы токов управления на угол, равный 2π.
На выходе функционального преобразователя 13 формируется код
Выходной сигнал функционального преобразователя 13 является входным сигналом для постоянных запоминающих устройств 7, 8.
В постоянные запоминающие устройства 7, 8 предварительно записаны значения функций синуса и косинуса соответственно. Входному коду nθ(i) соответствуют выходные сигналы
sinp1(θi+γ), cosp1(θi+γ),
которые поступают на цифровые входы умножающих цифроаналоговых преобразователей 14, 15. На объединенные аналоговые входы цифроаналоговых преобразователей 14, 15 с задатчика 16 тока приходит сигнал Ui, пропорциональный требуемой амплитуде фазных токов двигателя i. На выходах цифроаналоговых преобразователей 14, 15 получают напряжения, которые с достаточной степенью точности аппроксимируют требуемые задания фазных токов (1).
Предлагаемое формирование заданий фазных токов двигателя при его частотно-токовом управлении не накладывает каких-либо ограничений на коэффициенты электрической редукции управляемого двигателя и датчика положения ротора двигателя, а также на их соотношение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |
| Устройство для управления трехфазным двигателем переменного тока | 1991 |
|
SU1836800A3 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1781810A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1988 |
|
SU1700737A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M-ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092965C1 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2088034C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
Использование. В линейном приводе переменного тока. Сущность. В электропривод в частотно-токовым управлением введены преобразователь 9 приращений периода в код, накопитель 10 приращений, функциональный преобразователь 13, выполненный с возможностью формирования на выходе кода, представляющего собой остаток от деления входного кода на делитель n0 = К•(Р2/Р1) • 2π , где Р1 и Р2 - коэффициенты электрической редукции двигателя 1 и датчика 2 положения ротора двигателя; К и π - постоянные величины. С помощью введенных блоков на выходах цифро-аналоговых преобразователей 14, 15 получают напряжения, которые с высокой точностью опроксимируют требуемые задания фазных токов, при этом не накладываются ограничения на коэффициенты электрических редукций двигателя и датчика. Данное обстоятельство и приводит к упрощению электропривода. 2 ил.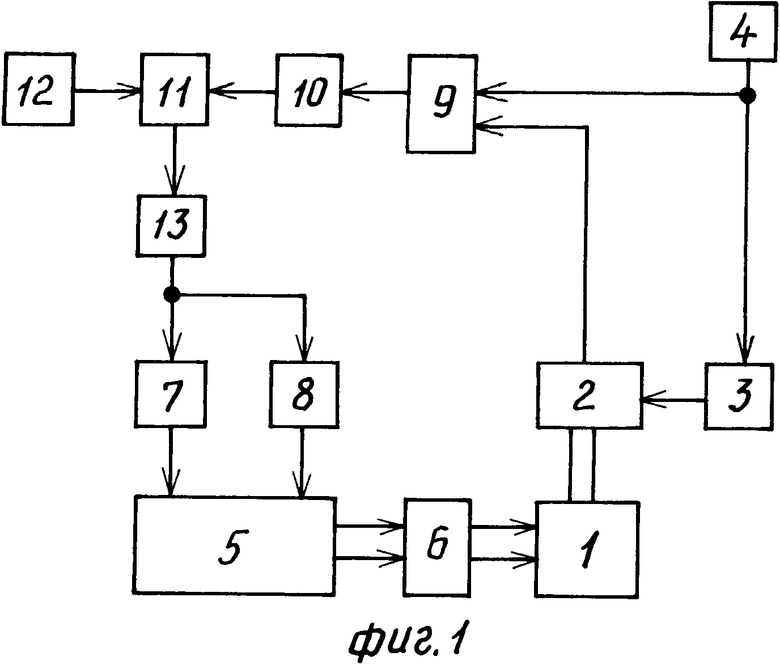
Электропривод с частотно-токовым управлением, содержащий двигатель переменного тока с установленным на его валу датчиком положения ротора, источник синусоидального напряжения, вход которого подключен к генератору опорной частоты, а выход к входу датчика положения, блок задания фазных токов, выходы которого подключены через усилитель фазных токов к фазным обмоткам двигателя, постоянные запоминающие устройства, запрограммированные по законам синуса и косинуса, выходы которых подключены к входам блока задания фазных токов, двухвходовый сумматор, блок задания начальной фазы, отличающийся тем, что введены преобразователь приращенный периода в код, который подключен первым входом к выходу датчика положения, а вторым входом к генератору опорной частоты, накопитель приращений, который подключен входом к выходу преобразователя приращений периода в код, а выходом к первому входу двухвходового сумматора, второй вход которого подключен к блоку задания начальной фазы, функциональный преобразователь, который подключен входом к выходу двухвходового сумматора, а выходом к объединенным входам постоянных запоминающих устройств, причем функциональный преобразователь выполнен с возможностью формирования на выходе кода, представляющего собой остаток от деления входного кода на делитель
где р1 и р2 коэффициенты электрической редукции двигателя и датчика положения;
K и π - постоянные величины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1988 |
|
SU1700737A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1319226A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
