Изобретение относится к измерительной технике, а именно к средствам контроля датчиков угловой скорости (ДУС).
Известен стенд, содержащий поворотную платформу для закрепления на ней контролируемого ДУС, установленную на оси стенда, чувствительный элемент, электродвигатель и усилитель. В качестве чувствительного элемента стенд содержит интегрирующий гироскоп, достаточно грубый по своим характеристикам [1]
Входная ось контролируемого ДУС параллельна оси вращения платформы. После закрепления на стенде контролируемого ДУС стенд становится двухгироскопной системой.
При использовании интегрирующего гироскопа в качестве чувствительного элемента для уменьшения погрешностей системы стабилизации необходимо увеличивать коэффициент усиления усилителя системы стабилизации, при этом возникают сложности с обеспечением устойчивости системы; для обеспечения устойчивости приходится допускать большие погрешности.
Испытуемые приборы, закрепляемые на платформе, являются источниками вибраций, что приводит к появлению помех на входе усилителя системы стабилизации, вызывает дополнительный систематический дрейф чувствительного элемента стенда (интегрирующего гироскопа), т.е. приводит к погрешности задания постоянной угловой скорости и искажению гармонических колебаний.
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание, имеющее возможность вращаться вокруг оси стенда, предназначенное для закрепления на нем контролируемого датчика угловой скорости, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения [2]
В известном стенде, имеющем в качестве основы электромеханический поворотный стенд с редукцией, невозможно контролировать амплитудно-частотную (АЧХ) и фазово-частотную (ФЧХ) характеристики ДУС, также являющиеся основными контролируемыми техническими характеристиками.
При контроле АЧХ, ФЧХ задаются не механические колебания основания вокруг оси чувствительности ДУС, как это имеет место в эксплуатации, а колебания его оси прецессии, возбуждаемые генератором, подключенным к датчику момента ДУС. Имеет место, таким образом, неадекватность условий испытаний эксплуатационным.
Кроме того, недостатками аналога являются:
недостаточная точность контроля масштабного коэффициента прецизионных ДУС вследствие погрешности и нестабильности задания стендом постоянной по величине и направлению угловой скорости;
низкая чувствительность стенда, т.е. невозможность точного задания малых угловых скоростей (0,01-0,1)o/C при аттестации прецизионных ДУС по масштабному коэффициенту;
возможность измерения масштабного коэффициента только при задании целого числа оборотов основания, т. е. по отношению к среднему значению угловой скорости. При измерении масштабного коэффициента ДУС на части оборота основания нестабильность задаваемой угловой скорости вносит большие погрешности в результаты измерения, а необходимость задания целого числа оборотов удлиняет время контроля, особенно на малых скоростях;
невозможность задания от стенда гармонических колебаний вокруг оси чувствительности ДУС для контроля АЧХ, ФЧХ.
Задачей изобретения является разработка стенда, обеспечивающего повышение точности контроля масштабного коэффициента ДУС за счет повышения точности и стабильности задания стендом угловых скоростей, при обеспечении возможности контроля динамических характеристик ДУС за счет расширения функциональных возможностей стенда в части задания гармонически изменяющихся скоростей.
Технический результат достигается тем, что в стенд для контроля прецизионного гироскопического датчика угловой скорости, содержащий основание для закрепления на нем с возможностью вращения вокруг измерительной оси стенда контролируемого датчика угловой скорости с датчиками угла и момента, соединенными через усилитель обратной связи и расположенными по выходной оси датчика угловой скорости, электродвигатель постоянного тока, коллектор подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения, введены сумматор и усилитель стабилизации, соединенные последовательно, фотоэлектрический муаровый датчик угла, интерполятор фазовый и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно, и блок преобразования информации датчика угловой скорости, электродвигатель постоянного тока выполнен бесконтактным, при этом вход блока преобразования информации датчика угловой скорости и первый вход сумматора предназначены для соединения с выходом усилителя обратной связи, выход задатчика эталонного напряжения соединен с вторым входом сумматора, первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим входами усилителя стабилизации, при этом фотоэлектрический муаровый датчик угла расположен на измерительной оси стенда.
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем:
чувствительность предлагаемого стенда, т. е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента контролируемого ДУС, определяется не моментами трения на оси вращения стенда и коэффициентом трения в редукции, как это имеет место в прототипе, а моментами сопротивления на оси прецессии контролируемого ДУС, т.е. величиной на несколько порядков меньшей, чем в прототипе.
Это достигается за счет соединения контролируемого ДУС с элементами стенда в двухконтурную замкнутую систему управления двигателем, работающую по сигналу самого контролируемого ДУС. Таким образом, при контроле можно задавать те минимальные скорости, которые способен почувствовать проверяемый ДУС, являющийся на период контроля одновременно и чувствительным элементом стенда и работающий в режиме "самоконтроля";
повышение точности и стабильности задаваемой стендом угловой скорости обеспечивается за счет наличия в предлагаемом стенде:
двухконтурной системы управления, что позволяет за счет одного контура (системы обратной связи контролируемого ДУС) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижения необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока;
использование самого контролируемого датчика угловой скорости в качестве чувствительного элемента стенда исключает необходимость введения в стенд собственных гироскопических чувствительных элементов (как это сделано в аналоге), что повышает точность и стабильность задаваемой угловой скорости, постоянной по величине и гармонически изменяющейся за счет исключения вибрационного взаимовлияния двух гироскопов. Вибрационное взаимовлияние гироскопов в аналоге приводило к накоплению чувствительным элементом стенда (интегрирующим гироскопом) систематического дрейфа, на который накладывались низкочастотные биения, что полностью исключено в предлагаемом стенде.
Кроме того, использование контролируемого ДУС в качестве чувствительного элемента стенда разрешает проблему, состоящую в противоречии между точностью контроля и диапазоном задаваемых стендом угловых скоростей, присущую аналогу.
Суть проблемы заключается в том, что прецизионный чувствительный элемент имеет малый диапазон измеряемых угловых скоростей, а чувствительный элемент с мощным датчиком момента, позволяющий реализовать значительный диапазон задаваемых угловых скоростей (как это сделано в аналоге), имеет низкую точность.
В предлагаемом техническом решении контролируемый ДУС работает в режиме самоконтроля, что снимает эту проблему;
использование фотоэлектрического муарового датчика угла в качестве информационного датчика стенда обеспечивает высокоточное измерение задаваемой угловой скорости, что определяет точные характеристики стенда;
возможность контроля АЧХ и ФЧХ на стенде, т.е. расширение функциональных возможностей, обеспечивается безредукторным исполнением привода (в отличие от прототипа) и отсутствием возбудителей вибрационных взаимовлияний элементов стенда, искажающих задаваемые вокруг оси стенда гармонические колебания (в отличие от аналога);
Предлагаемый стенд позволяет производить измерение масштабного коэффициента ДУС при повороте оси стенда на любой угол (значительно меньший оборота), что сокращает время испытаний, без снижения точности контроля, как это имело место в прототипе.
Это обеспечивается за счет соединения выхода усилителя обратной связи ДУС с первым входом сумматора, второй вход которого соединен с задатчиком, выход которого связан с усилителем стабилизации и далее с двигателем.
Такое соединение контролируемого ДУС с элементами стенда в двухконтурную систему управления обеспечивает практическое отсутствие сдвига фаз между выходной информацией ДУС (считываемой с выхода усилителя обратной связи) и выходной информацией с задаваемой угловой скорости (считываемой с информационного фотоэлектрического датчика угла), что делает результаты контроля величины масштабного коэффициента инвариантными к помехам (масштабный коэффициент есть отношение упомянутых информаций. Если имеет место помеха, то она содержится в обеих информациях и исключается в их отношении).
Предложенное техническое решение позволяет стыковать стенд с ЭВМ.
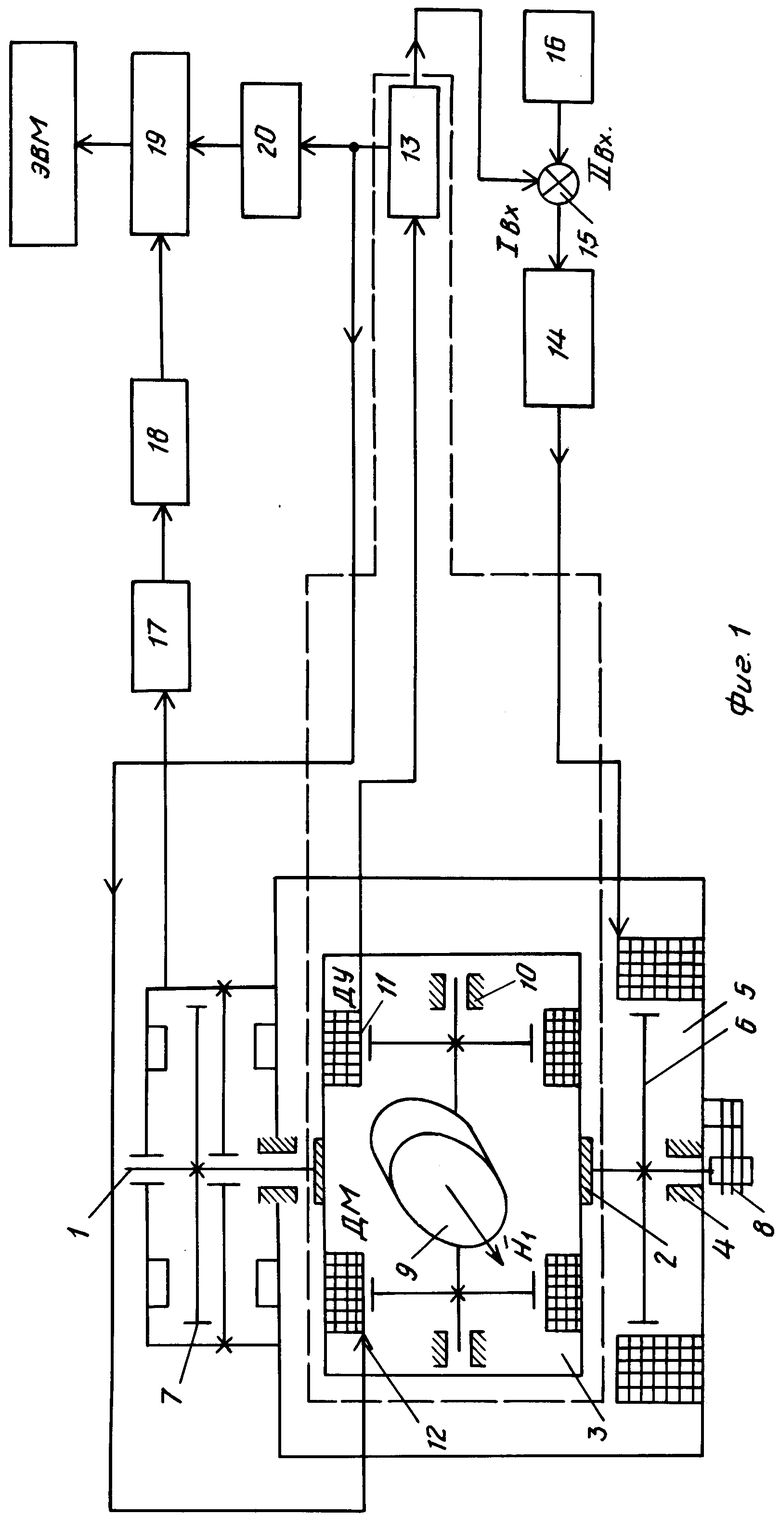
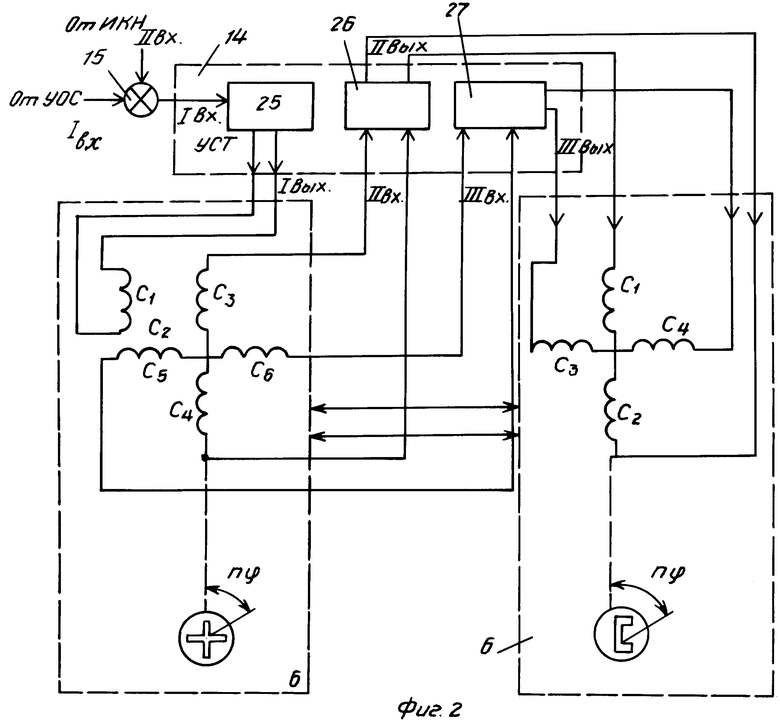
На фиг. 1 представлена структурная схема предлагаемого стенда; на фиг.2 структурная схема усилителя системы стабилизации и электродвигателя постоянного тока в бесконтактном исполнении со связями между ними.
Стенд содержит ось вращения 1, выполненную в виде литой детали, имеющей кольцевую расточку 2 для установления контролируемого датчика 3 угловой скорости (литая деталь с кольцевой расточкой 2 и осью 1 основание). Ось вращения на шарикоподшипниках 4 подвешена в корпусе 5 стенда. На оси закреплены подвижные части двигателя 6 постоянного тока и датчика угла 7, неподвижные части которых закреплены на корпусе устройства.
На оси 1 закреплен также коллектор 8, имеющий золоченые контактные дорожки. Щетки с платиноиридиевыми контактами закреплены неподвижно. Коллектор 8 предназначен для подвода питания к контролируемому ДУС, который устанавливается на ось 1 со своим технологическим жгутом, оканчивающимся вилкой разъема, который стыкуется с ответной частью разъема, закрепленной на оси.
К этой ответной части разъема подпаяны провода жгута, проложенного в полой оси и распаянного на коллектор 8. Это обеспечивает быструю установку и съем контролируемого ДУС с устройства.
В предлагаемом устройстве контролируемый ДУС 3 соединен с элементами устройства в двухконтурную замкнутую систему регулирования.
Поскольку объект контроля ДУС 3 предназначен для работы в качестве чувствительного элемента стенда, для рассмотрения работы стенда необходимо рассмотреть отдельные конструктивные элементы ДУС 3.
В состав ДУС 3 входит гироскоп 9, смонтированный в поплавковом гидроузле, который на прецизионных камневых опорах 10 подвешен в корпусе ДУС 3.
На оси прецессии ДУС закреплены роторы датчика 11 угла и датчика 12 момента, статоры которых закреплены на корпусе ДУС. Датчик 11 угла связан с входом усилителя 13 обратной связи, выход которого связан с датчиком 12 момента.
Предлагаемый стенд содержит усилитель 14 системы стабилизации, сумматор 15 и задатчик 16 эталонного (калиброванного) напряжения (ИКН).
Сумматор 15 выполнен на базе операционного усилителя, имеет два входа, причем первый вход предназначен для соединения с выходом усилителя 13 обратной связи объекта контроля, второй вход соединен с выходом задатчика 16 напряжения. Выход сумматора соединен с входом усилителя 14 системы стабилизации, выход последнего соединен с входом двигателя 6, т.е. сумматор 15, усилитель системы стабилизации и двигатель 6 соединены последовательно.
Для отработки результатов контроля на ЭВМ стенд снабжен фазовым интерполятором 17, блоком 18 преобразования информации, которые предназначены для обработки информации фотоэлектрического датчика угла 7. При этом выход фотоэлектрического датчика угла 7 соединен через интерполятор 17 с входом блока 18 преобразования, выход которого соединен с согласующим устройством 19, т.е. датчик угла 7 и его измерительные устройства 17 и 18 соединены последовательно.
Выходная информация контролируемого ДУС преобразуется в дискретную форму с помощью преобразователя 20, выход которого связан с одним выходом усилителя 13 обратной связи. Преобразователь информации может быть выполнен как частотно-импульсный либо широтно-импульсный, либо иметь другую структуру преобразователей типа аналог-код.
Усилитель 14 стабилизации состоит из преобразователя 25 и двух идентичных усилителей 26 и 27. Питание всех электронных устройств обеспечивается блоком питания.
Преобразователь 25 представляет собой устройство для модуляции и усиления постоянного сигнала, выполненное на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов.
Каждый из усилителей 26 и 27 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из демодулятора, корректирующего устройства и усилителя мощности, реализованных на базе операционных усилителей с отрицательной обратной связью.
Двигатель постоянного тока 6 выполнен состоящим из двух частей: датчика положения ДП и двигателя бесконтактного ДБ, неподвижные части которых соединены в одном корпусе, закрепленном на корпусе стенда, а подвижные части крепятся на оси (фиг.1).
Датчик положения ДП представляет собой синусно-косинусный вращающийся трансформатор с безобмоточным ротором.
Бесконтактный двигатель ДБ имеет двухобмоточный статор (обмотки С1-С2, С3-С4), 8- полюсный ротор.
Усилитель 14 системы стабилизации и двигатель 6 соединены следующим образом.
Первый выход усилителя стабилизации 14, организованный с преобразователя 25, связан с обмоткой возбуждения С1-С2 ДП, первый вход усилителя системы стабилизации 14 (с усилителя УМ1) с синусной обмоткой С3-С4 ДП, а второй вход усилителя (с усилителя УМ2) с косинусной обмоткой С5-С6 ДП (т.е. вращающегося трансформатора). Второй выход усилителя системы стабилизации (с УМ1) связан с синусной обмоткой С1-С2 ДБ, а третий выход усилителя (с УМ2) с косинусной обмоткой С3-С4 ДБ.
Предлагаемое устройство работает следующим образом.
Режим контроля масштабного коэффициента ДУС.
От задатчика 16 эталонного напряжения на второй вход сумматора 15 подают напряжение U, пропорциональное угловой скорости ω которую необходимо задать (воспроизводимая угловая скорость). Поскольку на 1-й вход сумматора напряжение еще не поступило, то это напряжение U с выхода сумматора 15 поступает на вход усилителя 14 системы стабилизации, а именно на вход преобразователя 25, который вырабатывает воздействие, подаваемое на вход двигателя 6, а именно на обмотку возбуждения С1-С2 ДП, принадлежащего двигателю.
При появлении модулированного сигнала, выработанного преобразователем 25 на обмотке возбуждения С1-С2 ДП, в выходных обмотках С3-С4 и С5-С6 ДП индуцируются напряжения Uдп1 Umaxsin θ и Uдп2Umaxcosθ где θ n ϕ ϕ относительный угол разворота ротора ДП относительно статора, n число пар полюсов. Эти напряжения усиливаются и корректируются усилителями 26, 27, являющимися выходными каскадами усилителя системы стабилизации 14, после чего эти напряжения поступают на обмотки С1-С2, С3-С4 ДБ. Суммарный момент, действующий на ротор двигателя 6, равен сумме моментов, развиваемых обеими обмотками ДБ.
MΣ= M1-2 + M3-4K ˙ Φ1 ˙ I sin θ + K ˙ Φ2 I cos θ (1) K ˙ Φmax ˙ I [sin θ sin θ + cos θ cos θ] K Φmax I, где К коэффициент крутизны характеристики;
Φmax,I максимальное значение магнитного потока и средняя величина тока в ДП.
Двигатель ДБ 6 развивает момент, начинается вращение оси со скоростью ω.
Угловая скорость ω действует вокруг оси чувствительности контролируемого ДУС. (При контроле масштабного коэффициента ДУС его гиромотор включен, т.е. ДУС имеет кинетический момент Н, обратная связь с датчика угла 11 через усилитель обратной связи 13 на датчик момента 12 замкнута).
Гироскоп 9 при наличии угловой скорости ω вокруг оси прецессирует вокруг своей оси подвеса, по цепи обратной связи ДУС течет ток i, пропорциональный входной угловой скорости; на выходе усилителя обратной связи создается напряжение U1, которое поступает на первый вход сумматора 15.
Напряжение U1 выражается следующим образом.
Основное соотношение, характеризующее установившийся режим работы ДУС с электрической обратной связью:
H ω Kдм ˙ i, (2) где i ток в цепи обратной связи ДУС;
Кдм крутизна характеристики датчика момента 12;
Е кинетический момент гироскопа 9;
ω угловая скорость вращения оси 1.
Из (2) имеем
i 
(3)
Если домножить обе части (3) на Р, где Р суммарное сопротивление выходного каскада усилителя обратной связи 13, то получим
u1 Rω
Rω
(4)
Напряжение U1, поступившее на первый вход сумматора 15, и напряжение U, поданное от задатчика 16 на второй вход сумматора 15, сравниваются в сумматоре, и разностное напряжение через усилитель системы стабилизации 14 поступает на вход двигателя 6, который изменяет момент (1), а следовательно, и скорость ω вращения оси 1, стремясь свести к нулю разностный сигнал на входе.
В установившемся режиме выполняется условие U1 U.
Скорость, развиваемая осью, постоянна.
Из сказанного видно, что для того, чтобы задать с помощью устройства угловую скорость ωi вокруг оси чувствительности ДУС, необходимо от задатчика 16 задать на второй вход сумматора напряжение
u  Rωi
Rωi
(5)
Здесь  R есть не что иное как предположительноe (известное заранее по результатам проектирования объекта контроля ДУС) значение его масштабного коэффициента (по напряжению).
R есть не что иное как предположительноe (известное заранее по результатам проектирования объекта контроля ДУС) значение его масштабного коэффициента (по напряжению).
При задании U после уравновешивания U1 U и установления постоянной по величине угловой скорости ωi вращения оси 1 с выхода усилителя обратной связи 13 через преобразователь 21 на вход ЭВМ 24 поступает информация число импульсов NДУС, соответствующая току обратной связи i, протекающему по цепи обратной связи.
Одновременно с фотоэлектрического датчика угла 7 через интерполятор фазовый 17, преобразователь 18 и ЭВМ поступает количество импульсов Nзад, соответствующее угловой скорости ωi действующей в течение времени Ti измерения. Отношение NДУС к Nзад определяет масштабный коэффициент ДУС при заданной скорости.
Режим контроля амплитудных и фазовых частотных характеристик.
В этом режиме устройство работает аналогичным образом.
Отличие состоит в том, что от задатчика 16 на второй вход сумматора подают синусоидальное напряжение, постоянное по амплитуде с частотой, имеющей определенное значение из заданной области частот контроля АФЧХ.
При этом ось 1 (в силу рассмотренного выше принципа работы устройства) начнет осуществлять колебания по синусоидальному закону, по такому же закону изменяется ток в цепи обратной связи ДУС, на сумматоре вырабатывается разностный сигнал, а двигатель 6 стремится свести этот сигнал к нулю.
Сравнение информации с выхода ДУС и с датчика 7 позволяет определить АФЧХ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
Использование: в измерительной технике, а именно в средствах контроля прецизионных гироскопических датчиков угловых скоростей. Сущность изобретения: в стенде контролируемый прецизионный гироскопический датчик угловой скорости (ДУС) одновременно использован и как чувствительный элемент стенда, в который введены усилитель стабилизации, сумматор, двигатель постоянного тока выполнен бесконтактным и фотоэлектрический муаровый датчик угла. При этом контролируемый ДУС на время контроля соединен с элементами стенда в двухконтурную систему управления двигателем, для чего выход усилителя обратной связи ДУС соединен с первым входом сумматора, с вторым входом которого соединен задатчик эталонных напряжений, выход сумматора соединен с первым входом усилителя стабилизации, первый, второй и третий выходы которого соединены с первым, вторым и третьим входами двигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим выходами усилителя стабилизации. 2 ил.
СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ, содержащий основание для закрепления на нем с возможностью вращения вокруг измерительной оси стенда контролируемого датчика угловой скорости с датчиками угла и момента, соединенными через усилитель обратной связи и расположенными по выходной оси датчика угловой скорости, аэлектродвигатель постоянного тока, коллектор подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжния, отличающийся тем, что в него введены сумматор и усилитель стабилизации, соединенные последовательно, фотоэлектрический муаровый датчик угла, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно, и блок преобразования информации датчика угловой скорости, электродвигатель постоянного тока выполнен бесконтактным, при этом вход блока преобразования информации датчика угловой скорости и первый вход сумматора предназначены для соединения с выходом усилителя обратной связи, выход задатчика эталонного напряжения соединен с вторым входом сумматора, первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим входами усилителя стабилизации, при этом фотоэлектрический муаровый датчик угла расположен на измерительной оси стенда.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения масштабного коэффициента компенсационного измерителя угловой скорости | 1973 |
|
SU476516A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
