Изобретение относится к измерительной технике, а именно к средствам контроля измерителей угловых скоростей (ИУС).
Известен стенд Массачусетского технологического института, содержащий поворотную платформу для закрепления на ней контролируемого ДУС, установленную на оси стенда, чувствительный элемент, электродвигатель и усилитель [1].
В качестве чувствительного элемента стенд содержит интегрирующий гироскоп, достаточно грубый по своим техническим характеристикам.
Входная ось контролируемого ДУС параллельна оси вращения платформы. После закрепления на стенде контролируемого ДУС стенд становится двухгироскопной системой. При использовании интегрирующего гироскопа в качестве чувствительного элемента для уменьшения погрешности системы стабилизации необходимо увеличивать коэффициент усиления системы стабилизации, при этом возникают сложности с обеспечением устойчивости системы, для обеспечения которой приходится допускать увеличение статической и динамической погрешности. Испытуемые приборы, закрепляемые на платформе, являются источниками вибраций, что приводит к появлению помех на входе усилителя системы стабилизации, вызывает дополнительный систематический дрейф чувствительного элемента стенда (интегрирующего гироскопа), т.е. приводит к погрешности задания угловой скорости и искажению гармонических колебаний (при контроле АЧХ и ФЧХ).
Стенд не получил применения для контроля масштабного коэффициента прецизионных ДУС и контроля АЧХ и ФЧХ из-за погрешностей задания постоянной по величине угловой скорости и гармонических колебаний по оси вращения стенда, возникающих вследствие взаимовлияния контролируемого ДУС и чувствительного элемента стенда.
Известен стенд для контроля датчиков угловых скоростей по а.с. N 476516, который содержит основание, имеющее возможность вращаться вокруг оси стенда, предназначенное для закрепления на нем датчика угловой скорости, подлежащего контролю, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому ДУС, информационный датчик угла, выполненный в виде нуль-контакта, закрепленного на оси вращения стенда, и измерительную систему.
Нуль-контактный датчик предназначен для отсчета целого числа оборотов вращающейся оси (с контролируемым ДУС), что позволяет определять среднюю за оборот задаваемую скорость и, таким образом, компенсировать ее колебания за счет неравномерности вращения оси стенда.
Измерительная система содержит конденсатор, включенный последовательно в цепь обратной связи контролируемого ДУС между выходом усилителя обратной связи ДУС и его датчиком момента, и ключ, подключенный параллельно конденсатору.
Таким образом, при контроле проверяемой прибор соединен с элементами измерительной системы стенда. Кроме того, измерительная система содержит два источника эталонного напряжения и самопишущий милливольтамперметр. При этом один эталонный источник подключен параллельно к ключу и конденсатору, а ко второму эталонному источнику параллельно подключено эталонное сопротивление.
Наиболее близким по технической сущности к заявляемому техническому решению является стенд по а.с. N 459735. Этот стенд содержит стол для установки испытуемого прибора и привод стола с двумя двигателями, один из которых - коллекторный постоянного тока связан со столом, причем щетки коллектора двигателя постоянного тока укреплены на валу второго двигателя.
Этот стенд принят за прототип.
Устройства, описанные выше, имеющие в качестве основы электромеханический стенд с редукцией, не позволяют контролировать амплитудно-частотную (АЧХ) и фазово-частотную (ФЧХ) характеристики ДУС, также являющиеся основными контролируемыми характеристиками. При контроле АЧХ и ФЧХ задаются не механические колебания вокруг оси чувствительности ДУС, как это имеет место в эксплуатации, а колебания его оси прецессии, возбуждаемые генератором, подключенным к датчику момента ДУС.
Таким образом, имеет место неадекватность условий испытаний эксплуатационным условиям.
Описанное устройство по а.с. N 459735 имеет следующие недостатки:
1) недостаточная точность контроля масштабного коэффициента прецизионного ДУС вследствие погрешности и нестабильности задания стендом постоянной по величине и направлению угловой скорости;
2) низкая чувствительность стенда, т.е. невозможность точного задания малых угловых скоростей от 0,01 до 0,1o/с при аттестации прецизионных ДУС по масштабному коэффициенту;
3) возможность измерения масштабного коэффициента только при задании целого числа оборотов основания, т.е. по отношению к среднему значению угловой скорости. При измерении масштабного коэффициента ДУС на части оборота основания нестабильность задаваемой угловой скорости вносит большие погрешности в результаты измерений, а необходимость задания целого числа оборотов существенно удлиняет время контроля, особенно на малых скоростях;
4) невозможность задания от стенда гармонических колебаний вокруг оси чувствительности ДУС для контроля АЧХ и ФЧХ;
Задачей изобретения является расширение функциональных возможностей стенда при обеспечении высокой точности задания угловых скоростей.
Поставленная задача решается посредством того, что в стенд для контроля измерителей угловых скоростей, содержащий корпус, платформу, установленную с возможностью вращения на оси стенда, электродвигатель постоянного тока, коллектор, введены источник калиброванного напряжения, два кварцевых маятниковых акселерометра, усилитель системы стабилизации с сумматором, последовательно соединенные фотоэлектрический муаровый датчик угла, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, а также процессорный модуль, состоящий из пятиканального аналого-цифрового преобразователя, двухканального цифроаналогового преобразователя, унифицированного параллельного 16-разрядного интерфейса, процессора и ЭВМ, причем акселерометры закреплены на платформе, ось чувствительности первого акселерометра перпендикулярна радиусу платформы, ось чувствительности второго акселерометра расположена вдоль радиуса платформы. Каждый акселерометр содержит корпус, кварцевую пластину, емкостный датчик угла и магнитоэлектрический датчик момента, соединенные через усилитель обратной связи, выходной каскад которого выполнен в виде делителя напряжения, при этом первый вход сумматора соединен с выходом первого канала цифроаналогового преобразователя, второй вход сумматора соединен с выходом второго канала цифроаналогового преобразователя, третий вход сумматора соединен с выходом источника калиброванных напряжений, выход сумматора соединен с первым входом усилителя стабилизации.
Первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя стабилизации, первый и второй выходы делителя напряжений в выходной цепи усилителя напряжений в выходной цепи усилителя обратной связи первого акселерометра соединены соответственно с входами первого и второго каналов аналого-цифрового преобразователя, первый и второй выходы делителя напряжений в выходной цепи усилителя обратной связи второго акселерометра соединены соответственно с входами третьего и четвертого каналов аналого-цифрового преобразователя.
Выход испытуемого прибора соединен с входом пятого канала аналого-цифрового преобразователя, выход блока преобразования информации соединен с входом унифицированного параллельного 16-разрядного интерфейса, выходы пяти каналов аналого-цифрового преобразователя, входы двух каналов цифроаналогового преобразователя и выход унифицированного параллельного 16-разрядного интерфейса соединены с процессором через внутреннюю шину процессорного модуля, и процессорный модуль соединен с ЭВМ через 16-разрядный портовый интерфейс.
Совокупность существенных признаков, характеризующих заявляемое техническое решение, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем:
1) чувствительность предлагаемого устройства, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента, контролируемого ИУС, определяется не моментами трения на оси вращения стенда и коэффициентом трения в редукции, как это имеет место в прототипе, а чувствительностью кварцевого акселерометра, чему соответствует величина угловой скорости, на несколько порядков меньшая, чем в прототипе;
2) повышение точности и стабильности задаваемой угловой скорости обеспечивается за счет наличия в предлагаемом техническом решении:
а) двухконтурной системы управления, что позволяет за счет одного контура (цепи обратной связи кварцевого акселерометра) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижения необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока;
б) использования фотоэлектрического муарового датчика угла в качестве информационного датчика устройства, который обеспечивает высокоточное измерение задаваемой угловой скорости, что определяет точностные характеристики стенда;
3) возможность контроля АЧХ и ФЧХ на устройстве, т.е. расширение функциональных возможностей, обеспечивается в отличие от прототипа, безредукторным исполнением привода;
4) предлагаемое устройство позволяет производить измерение масштабного коэффициента ИУС при повороте оси стенда на любой угол, значительно меньший оборота, что сокращает время испытаний без снижения точности контроля, как это имело место в прототипе. Это обеспечивается за счет соединения выходов усилителей обратной связи тангенциального и центробежного акселерометров через процессорный модуль с первым и вторым входами сумматора, третий вход которого соединен с источником калиброванных напряжений, а выход - с двигателем стенда, причем на первый и второй входы сумматора от процессорного модуля поступают управляющие воздействия, пропорциональные соответственно угловой скорости и угловому ускорению, измеряемым по сигналам акселерометров;
5) таким образом, процессорный модуль формирует управляющие воздействия, пропорциональные первой и второй производным углам от угла разворота платформы. Это означает, что в контуре управления двигателя осуществляется регулирование по первой и второй производной от угла разворота платформы, что, как известно из теории автоматического регулирования, улучшает качество регулирования и снижает погрешности системы управления;
6) в предлагаемом устройстве за счет применения в качестве чувствительного элемента системы управления двигателем тангенциального кварцевого акселерометра обеспечивается широкий диапазон задаваемых стендом угловых скоростей (при диапазоне измерения акселерометром от 0,0000005 g до 7g диапазон задаваемых угловых скоростей колеблется от 0,0002o/с до 1200o/с при достаточно малых габаритах платформы, радиус которой равен 15 см);
7) осуществляется с помощью процессорного модуля сравнение результатов измерения угловой скорости и углового ускорения платформы тремя измерителями: двумя кварцевыми акселерометрами и фотоэлектрическим датчиком угла, производится идентификация выбросов (помех) в результатах измерения, осреднение формируемой информации по угловой скорости и ускорению, и отключение датчика, имеющего выброс, т.е. осуществляется прогноз выброса за счет избыточности числа измерителей;
8) имеется выходная информация по угловому ускорению;
9) устройство стыкуется с ЭВМ.
Таким образом, заявляемое техническое решение представляет собой новую совокупность признаков по сравнению с известными решениями задачи, оно не очевидно из уровня техники и может быть признано соответствующим критерию "изобретательский уровень".
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - структурная схема усилителя системы стабилизации и бесконтактного двигателя постоянного тока; на фиг. 3 - конструктивная схема кварцевого акселерометра; на фиг. 4 - 7 - алгоритм работы процессорного модуля стенда при задании ω ≤ 30°/с ; на фиг. 8 - алгоритм работы процессорного модуля стенда при задании ω > 30°/с ; на фиг. 9, 10 - алгоритм работы ЭВМ при измерении параметров ИП.
Предлагаемое устройство содержит корпус (на фиг. 1 не показан), траверсу 1, имеющую ось вращения, являющуюся выходной осью стенда. На траверсе 1 закреплена платформа 2, предназначенная для установки испытуемого прибора 3, и коллектор 4 для подвода питания к испытуемому прибору и кварцевые акселерометры 5 и 6. Кварцевые акселерометры 5 и 6 имеют идентичную конструкцию, которая в виде функциональной схемы представлена на фиг.1 и в виде конструктивной схемы на фиг. 3. Чувствительным элементом акселерометров 5 и 6 является кварцевая пластина 7, у которой центральная часть (собственно маятник - фиг. 3) соединена с наружным кольцом пластины 7 - торсионом, выполненным из той же самой пластины в виде местного утончения до размера a = 0,6 мм. Наружное кольцо пластины 7 зажато между двумя корпусами 8 акселерометра. Датчик угла 9 акселерометра 5, 6 - емкостной дифференциальный выполнен в виде напыления из золота на маятнике пластины 7 и поверхностях корпусов 8. Датчик момента 10 - магнитоэлектрический, состоит из катушек, закрепленных на маятнике пластины 7, и постоянных магнитов, закрепленных на корпусах 8. Электрическая связь между обкладками датчика угла 9, катушками датчика момента 10 и внешними цепями осуществлена с помощью золотого напыления на торсионе пластины 7.
Акселерометр 5 закреплен на платформе 2 так, что ось его чувствительности перпендикулярна радиусу R1 платформы 2. Этому соответствует положение пластины 7 вдоль радиуса R1 (плоскость пластины перпендикулярна плоскости платформы). Этот акселерометр измеряет тангенциальное линейное ускорение при вращении платформы и в дальнейшем тексте называется тангенциальным. Акселерометр 6 закреплен на платформе 2 так, что его ось чувствительности расположена вдоль радиуса R2 платформы 2 (причем R1 = R2). Этому соответствует расположение плоскости пластины 7 перпендикулярно радиусу R2. Этот акселерометр измеряет центробежное ускорение при вращении платформы 2 и в дальнейшем тексте называется центробежным.
Усилители обратной связи 11 обоих акселерометров 5 и 6 абсолютно идентичны, выполнены каждый в виде бескорпусной гибридно-пленочной микросборки 12 на керамической подложке. Корпус усилителя обратной связи 11 закреплен непосредственно на корпусе соответствующего акселерометра 5 и 6. В состав усилителя 11 входит также делитель напряжения 13 (для акселерометра 5) и 14 (для акселерометра 6), который выполнен в виде регулировочных резисторов, расположенных вне микросборок 12. Датчик угла 9, микросборка 12 (собственно усилитель обратной связи), делитель напряжения 13 (14) и датчик момента 10 соединены последовательно. Соединение датчика угла 9, усилителя обратной связи 12, сопротивлений Rн', Rн'', RДМ и датчика момента 10 - образуют первый контур системы управления стенда.
Конструкция кварцевого акселерометра разработана Московским институтом электромеханики и автоматики (МИЭА) и имеет серийное исполнение - акселерометр АК6 (6В2 781.278 ТУ) [1].
На оси траверсы 1 закреплен подвижный лимб фотоэлектрического муарового датчика угла (ДИФ) 15, неподвижный лимб жестко связан с корпусом стенда. Конструкции подобных датчиков описаны в книге [2].
На оси траверсы 1 со стороны, противоположной фотоэлектрическому датчику угла 15, закреплена подвижная часть двигателя постоянного тока 16, выполненного по схеме "датчик положения - двигатель бесконтактный" (ДП-ДБ). Неподвижные части ДП-ДБ соединены в одном корпусе, жестко закрепленном на корпусе предлагаемого устройства. Датчик положения ДП представляет собой синусно-косинусный вращающийся трансформатор (фиг. 2) с безобмоточным ротором (обмотка C1 - C2 - обмотка возбуждения, C3 - C4, C5 - C6 - синусная и косинусная обмотки). Конструктивное исполнение такого вращающегося трансформатора описано, например, в книге [3].
Вторая часть двигателя, собственно бесконтактный двигатель ДБ имеет двухобмоточный статор (обмотки C1 - C2, C3 - C4) и восьмиполюсный ротор. Такие двигатели описаны, например, в книге [4].
Делители напряжения 13, 14 акселерометров 5, 6 имеют по два выхода. Для управления двигателем 16 служит усилитель системы стабилизации 17, в состав которого входит сумматор 18, имеющий 3 входа и 1 выход. Сумматор 18 выполнен на базе операционного усилителя [5, с. 96, схема 4.20б]. Для задания угловой скорости служит источник калиброванных напряжений 19, выход которого соединен с третьим входом сумматора 18. Для обработки информации фотоэлектрического датчика угла 15 служат интерполятор фазовый (ИФ) 20 и блок преобразования информации (БПИ) 21, соединенные последовательно. Схемное и конструктивное решение элементов фотоэлектрического датчика угла 15, ИФ 20 и БПИ 21 описаны в книгах [2, 6].
Для формирования управляющих воздействий на двигатель 16, а также формирования выходной информации служат процессорный модуль 22 и ЭВМ 23. В состав процессорного модуля 22 входят: процессор 24, пятиканальный аналогово-цифровой преобразователь (АЦП) 25, двухканальный цифроаналоговый преобразователь (ЦАП) 26 и портовый 16-разрядный параллельный интерфейс 27. Процессорный модуль разработан АО "Инструментальные системы" г. Москва, имеет документацию, проспект описания прилагается. Процессор 24 представляет собой 16-разрядный цифровой процессор обработки сигналов с фиксированной точкой производительностью 107 операций/с TMS 320 C 25 фирмы Texas Instruments. Аналогово-цифровой преобразователь 25 выполнен как 12-разрядный многоканальный АЦП, принцип действия которого описан, например, в [5 с. 304]. Цифроаналоговый преобразователь 26 представляет собой 12-разрядный двухканальный ЦАП, принцип действия которого описан в [5 с. 247]. АЦП 25 и ЦАП 26 описаны также в прилагаемых материалах (см. описание процессорного модуля [5, с. 32 - 45]. Портовый параллельный интерфейс выполнен 16-разрядным. Краткое описание прилагается [5, с. 24 - 32]. Процессорный модуль 22 связан с элементами стенда следующим образом. Первый и второй выходы делителя напряжений 13 в выходной цепи усилителя обратной связи 11 тангенциального акселерометра 5 соединены соответственно со входами первого и второго каналов АЦП 25. Первый и второй выходы делителя напряжений 14 в выходной цепи усилителя обратной связи 11 центробежного акселерометра 6 соединены соответственно с входами третьего и четвертого каналов АЦП 25 (АЦП3 и АЦП4). Выход испытуемого прибора 3 соединен с входом пятого канала АЦП 25.Выходы всех каналов АЦП 25 через внутреннюю шину связаны с процессором 24. Первый и второй входы сумматора 18 соединены соответственно с выходами первого и второго каналов ЦАП 26 (ЦАП1 и ЦАП2), входы обоих каналов через внутреннюю шину соединены с процессором 24. Выход БПИ 21 соединен с входом портового параллельного интерфейса (ППИ) 27, выход которого через внутреннюю шину соединен с процессором 24. Процессор 24 соединен с ЭВМ 23 через внутреннюю шину и шину IBM (ISA bus). На фиг. 1 с целью упрощения не показаны внутренняя шина и шина IBM (ISA bus).
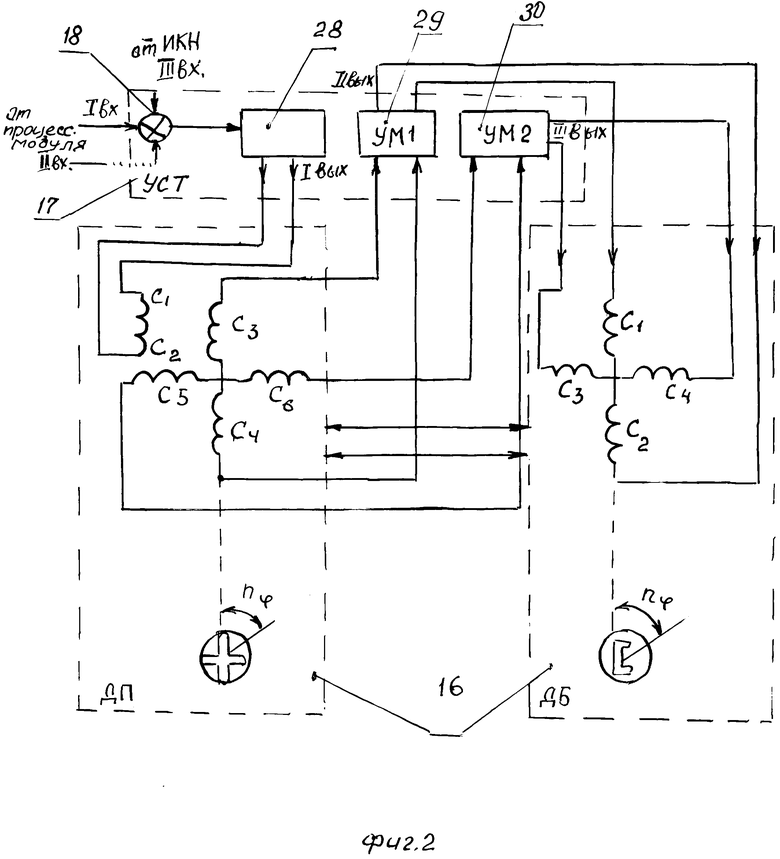
На фиг. 2 представлена структура усилителя системы стабилизации 17 и его связи с делителем 16. Усилитель 17 содержит преобразователь 28 и два идентичных усилителя мощности 29, 30. Преобразователь 28 представляет собой устройство для модуляции и усиления постоянного сигнала, выполненное на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Пример такого преобразователя приведен в книге [7].
Каждый из усилителей 29, 30 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью. Такие схемы описаны в книге [7].
Усилитель системы стабилизации 17 и двигатель 16 соединены следующим образом. Вход преобразователя 28 соединен с выходом сумматора 18. Вход преобразователя 28 является первым входом усилителя стабилизации 17.
Выходы усилителя стабилизации 17:
первый выход - это выход преобразователя 28, который связан с обмоткой возбуждения C1-C2 ДП двигателя 16 (первым входом двигателя 16);
второй выход - это выход усилителя мощности 29, который соединен синусной обмоткой C1-C2 ДБ двигателя 16 (вторым входом двигателя 16);
третий выход - это выход усилителя мощности 30, который соединен с конусной обмоткой C3-C4 ДБ двигателя 16 (третьим входом двигателя 16).
Второй вход усилителя стабилизации 17 есть вход УМ1 29. Этот второй вход усилителя стабилизации 17 соединен с первым выходом двигателя 16, а именно с синусной обмоткой C3-C4 ДП двигателя 16.
Третий вход усилителя стабилизации 17 - это вход УМ2 30. Этот третий вход соединен со вторым выходом двигателя 16, а именно с косинусной обмоткой C5-C6 ДП двигателя 16.
Предлагаемый стенд работает следующим образом.
Режим контроля масштабного коэффициента ИУС.
От задатчика эталонного напряжения 19 на третий вход сумматора 18 подают напряжение Uзад, пропорциональное угловой скорости ω0 , которую необходимо задать. Поскольку на первый и второй входы сумматора 18 напряжение еще не поступало, то это же напряжение Uс с выхода сумматора 18 поступает на вход преобразователя 28, который вырабатывает модулируемые напряжения, подаваемые на вход двигателя 16, а именно на обмотку C1-C2 ДП.
При появлении напряжения на обмотке C1-C2 в выходных обмотках C3-C4 и C5-C6 индуцируются напряжения:
UДП1= UmaxsinΘ; Uдп2= UmaxcosΘ; Θ=nϕ,
ϕ - относительный угол разворота ротора ДП, относительно статора; n - число пар полюсов.
Эти напряжения усиливаются и корректируются усилителями 29, 30, после чего поступают на обмотки C1-C2 и C3-C4 ДБ.
Суммарный момент, действующий на ротор двигателя 16, равен сумме моментов, развиваемых обеими обмотками ДБ:
где
k - коэффициент крутизны характеристики ДБ; Φmax, , J - максимальное значение магнитного потока и средняя величина тока J в ДБ 16.
Двигатель 16 развивает момент, начинается вращение оси 1 с угловой скоростью ω .
Угловая скорость ω действует вдоль оси траверсы 1. Если ω постоянна, т. е. ω = ω0= const , то угловое ускорение ε = dω0/dt = 0, , тангенциальное линейное ускорение aτ = εR1 = 0 и напряжение  на всех трех выходах делителя напряжений 13 усилителя обратной связи 11 тангенциального акселератора 5 равно нулю. При этом от тангенциального акселерометра 5 корректирующее напряжение на входы первого и второго каналов АЦП25 не подается, и на первый и второй входы сумматора 18 также не подается.
на всех трех выходах делителя напряжений 13 усилителя обратной связи 11 тангенциального акселератора 5 равно нулю. При этом от тангенциального акселерометра 5 корректирующее напряжение на входы первого и второго каналов АЦП25 не подается, и на первый и второй входы сумматора 18 также не подается.
На выходе делителя напряжения 14 усилителя обратной связи 11 центробежного акселерометра 6 возникает напряжение Uцб, пропорциональное квадрату угловой скорости ω0 . Действительно, ось чувствительности центробежного акселерометра 6 ориентирована вдоль радиуса R2 платформы 2, т.е. на чувствительный элемент акселерометра 6 действует центробежное линейное ускорение
aцб= ω2R2
(ускорение силы тяжести не дает выходного сигнала из-за принятой ориентации акселерометра). В соответствии с известным принципом работы маятникового акселерометра с обратной связью [8]:
ml = kДМIо.с
где
ml - маятниковость (г • см) : kДМ - крутизна характеристики датчика момента 10 акселерометра; Iо.с - ток в цепи обратной связи.
Откуда
Iо.с = ml/kДМ
при действии одного g.
При действии aцб= ω2R2
Iо.с2= ml ω
Выходное напряжение Uцб, снимаемое с выхода делителя 14, равно:
где
 - сопротивления, образующие делитель, и сопротивления обмотки датчика момента акселерометра 6.
- сопротивления, образующие делитель, и сопротивления обмотки датчика момента акселерометра 6.

Откуда
Аналогично с первого выхода делителя напряжения 14 того же акселерометра 6 снимается напряжение:
Откуда
Обе информации  идентичны, при этом напряжения Uцб1 и Uцб2 имеют разный масштаб, определяющий одну и ту же величину ω0 . Это необходимо, так как в процессорном модуле 22 (куда поступают напряжения на каналы АЦП3 и АЦП4) в каналах АЦП обычно имеет место различная величина коэффициентов усиления и различный масштаб входных напряжений, под который с помощью резисторов делителей напряжений 13 и 14 осуществляется согласование входной информации.
идентичны, при этом напряжения Uцб1 и Uцб2 имеют разный масштаб, определяющий одну и ту же величину ω0 . Это необходимо, так как в процессорном модуле 22 (куда поступают напряжения на каналы АЦП3 и АЦП4) в каналах АЦП обычно имеет место различная величина коэффициентов усиления и различный масштаб входных напряжений, под который с помощью резисторов делителей напряжений 13 и 14 осуществляется согласование входной информации.
Для известного кварцевого акселерометра АК6, примененного в рассматриваемом тракте измерения угловой скорости, диапазон измерения угловых скоростей акселерометром 6 равен 0,3-1200o/с. Действительно, порог чувствительности АК6 0,0000005 g, предел измерения - 7g.
ацб/g = 0,0000005 g, откуда ацб = 0,0005 см/с2. При R2 = 15 см aцб= ω
При перегрузке n = 7g ацб/g = 7 ⇒ ацб = 7000 см/с2, откуда ωmax= 1260 °/с.
Таким образом, кварцевый акселерометр 6 измеряет постоянную по величине угловую скорость в диапазоне от 0,3 до 1200o/с, выдает в процессорный модуль 22 соответствующие напряжения, с выхода процессорного модуля 22 на входы 1 и 2 сумматора 18 поступают соответствующие управляющие воздействия, такие, чтобы на выходе сумматора 18 разностный сигнал был равен нулю. Таким образом, при действии ω0= const на процессорный модуль 22 поступает входная информация от двух измерителей: акселерометра 6 и фотоэлектрического датчика угла 15.
Пусть при задании на третий вход сумматора 18 Uзад = const вследствие действия помех, как-то, нестабильности Mα момента сопротивления на оси траверсы 1 вследствие нестабильности трения в коллекторе, помехи βп - шумовой составляющей выходного сигнала акселерометров 5 и 6, тяжения датчика момента 10 Mβ1 (последние две составляющих малы) - скорость вращения ω траверсы l непостоянна, т. е. ε = dω/dt ≠ 0, тогда на чувствительный элемент тангенциального акселерометра 5 действует линейное ускорение, равное aτ = εR1. В соответствии с (2) в цепи обратной связи акселерометра 5 возникает ток
С первого выхода делителя напряжений 13 усилителя 11 тангенциального акселерометра 5 снимается напряжение
а со второго выхода того же делителя - напряжение
Различные напряжения Uτ1 и Uτ2 , пропорциональные одной и той же величине  , организованы в связи с разными требованиями к уровню напряжений АЦП1 и АЦП2 процессорного модуля 22. Напряжение Uτ1 поступает на вход первого канала АЦП1. Напряжение Uτ2 на вход второго канала АЦП2.
, организованы в связи с разными требованиями к уровню напряжений АЦП1 и АЦП2 процессорного модуля 22. Напряжение Uτ1 поступает на вход первого канала АЦП1. Напряжение Uτ2 на вход второго канала АЦП2.
Таким образом, при непостоянной по величине угловой скоростью ω акселерометр 5 выдает информацию, поступающую на вход процессорного модуля 22. Акселерометр 6 и фотоэлектрический датчик угла 15 работают так же, как и при ω0= const. Таким образом, при ω0≠ const в схеме имеется 3 измерителя угловой скорости, информация которых поступает в процессорный модуль 22.
С выхода сумматора 18 на вход делителя 16 через все вышеперечисленные связи усилителя стабилизации с двигателем поступает разность задающего напряжение Uзад = kω0, пропорционального угловой скорости ω0= const , которую желательно задать, и корректирующих сигналов, вырабатываемых на выходе процессорного модуля 22. Когда на выходе сумматора 18 разностный сигнал становится равным нулю, фактическое значение угловой скорости вращения траверсы l становится равным значению ω0= const .
Рассмотрим работу процессорного модуля 22 и его функции в заявленном стенде. Процессорный модуль 22 выполняет следующие функции (фиг. 4-7):
1) проводит опрос всех трех измерителей, а именно акселерометров 5 и 6 и фотоэлектрического датчика угла 15;
2) вычисляет мгновенные значения угловой скорости (по информации каждого измерителя) платформы 2, мгновенные значения угловых ускорений платформы 2 по той же информации;
3) вычисляет математические ожидания угловых скоростей  по информации соответственно тангенциального и центробежного акселерометров 5 и 6 и фотоэлектрического датчика угла 15. Математические ожидания вычисляются на периоде Tj между фронтами импульсов интерполятора фазового 20.
по информации соответственно тангенциального и центробежного акселерометров 5 и 6 и фотоэлектрического датчика угла 15. Математические ожидания вычисляются на периоде Tj между фронтами импульсов интерполятора фазового 20.
4) вычисляет на том же периоде времени Tj по информации тех же трех измерителей математические ожидания угловых ускорений платформы 2:
Mε′ - по информации тангенциального акселерометра,
Mε″ - по информации центробежного акселерометра,
Mε″′ - по информации ДИФ 15;
5) рассчитывает контрольные разности ρ1....ρ6 между математическими ожиданиями на периоде Tj для угловых скоростей (3 значения) и угловых ускорений (3 значения) и осуществляет диагностику или идентификацию "выброса" в информации трех измерителей (акселерометров 5 и 6 и ДИФ 15);
6) в зависимости от идентификации "выброса" формирует управляющее воздействие на периоде Tj по угловой скорости и угловому ускорению, которое через ЦАП1(по угловой скорости) и ЦАП2 (по угловому ускорению) поступает соответственно на первый и второй входы сумматора 18 для сравнения с напряжением на третьем входе сумматора 18 и формирования управляющего воздействия на двигатель 16.
Одновременно формируется соответствующая информация по математическому ожиданию угловой скорости и углового ускорения платформы 2 на периоде Tj, которая передается в оперативно запоминающее устройство (ОЗУ) ЭВМ 23. Такой алгоритм работы (фиг. 4-7) реализуется процессорным модулем 22 при задании угловых скоростей от ±0,002 до ±30 o/с, т.е. для малых угловых скоростей, в котором, особенно в "нижней" его части, важно идентифицировать и исключить из команд управления и информации "выбросы" возникающие вследствие действия помех и шумов различного характера. В области больших угловых скоростей ≥ 30o/с до 1200o/с, с одной стороны, выбросы не оказывают столь существенного влияния (в силу значительного уменьшения величины шум/полезный сигнал), с другой стороны, ДИФ 15 не может быть использован в качестве информационного, так как при больших угловых скоростях у него появляется динамическая погрешность, оцениваемая соотношением:
δ = Tоп•ω,
где Tоп - период опорной частоты ИФ 20.
Обычно Tоп= 2-4 мс.
При ω ≥ 30o/с • δ = (1-2)•10-3рад =(3-6) угл.мин [2].
Для угловых скоростей ≥ 30o/с процессорный модуль 22 реализует алгоритм, представленный на фиг.8, т.е. управляющие воздействия и информационные команды формируются по двум измерителям - акселерометрам 5 и 6, без идентификации "выбросов". ЭВМ 23 реализует алгоритм представленный на фиг.9, 10, например, для формирования результатов контроля двух основных параметров испытуемого прибора 3 - нулевого сигнала и масштабного коэффициента. ЭВМ 23 по информации, поступающей от процессорного модуля 22 в виде массивов значений математических ожиданий на периоде Tj по угловой скорости и угловому ускорению платформы 2, происходит расчет средних значений параметров за период времени, кратный периоду Tj. Информация по результатам расчетов выводится на печать. Рассмотрим подробнее алгоритм работы, представленный в Приложении (фиг.4-10).
Алгоритм работы процессорного модуля 22 при задании угловых скоростей ≤ 30o/с
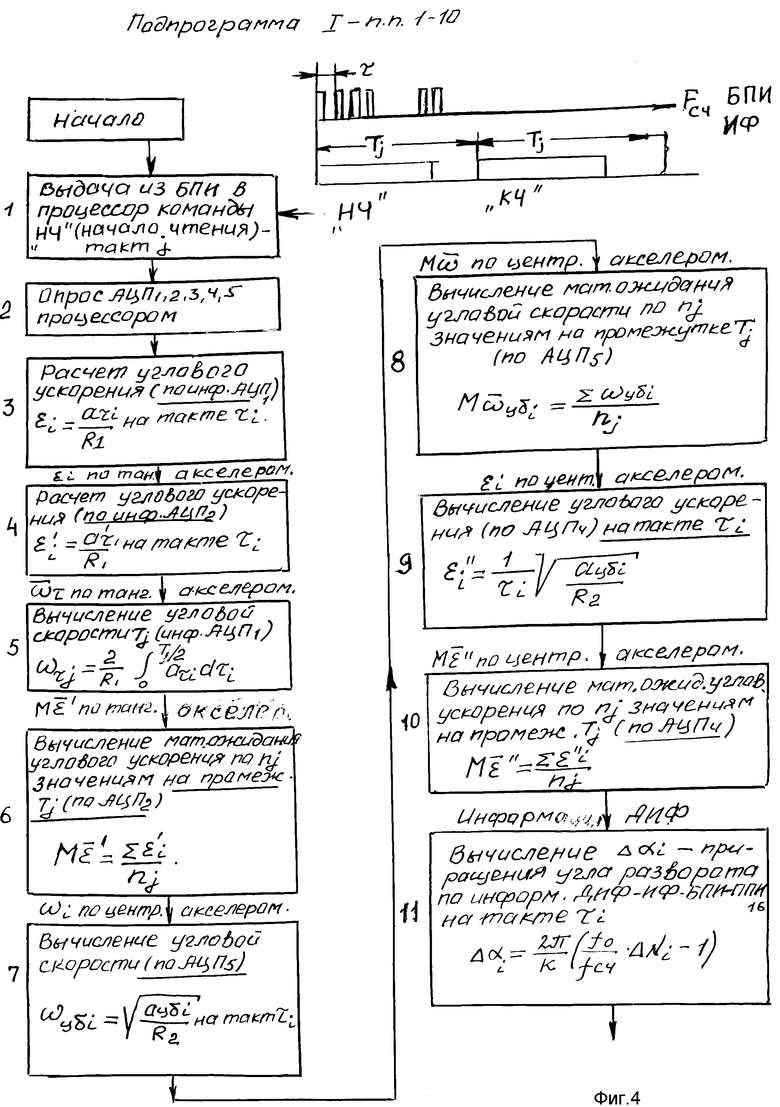
Пояснения относятся к операциям, обозначаемым на фиг.4-7 порядковыми номерами 1-46. Начало работы осуществляется по команте "НЧ" - начало чтения, поступающей в виде кода из БПИ 21 на портативный параллельный интерфейс 27 процессорного модуля 22. БПИ 21 выдает команду "НЧ" в виде 16-разрядного параллельного кода в момент времени, соответствующий началу периода Tj следования импульсов ИФ 20 (команда "КЧ" - конец чтения выдается в конце периода Tj). Такая "привязка" необходима, так как ДИФ 15 с сервисными устройствами - ИФ 20 и БПИ 21 обеспечивает правильный съем информации цепи только при условии "привязки" схемы к фронтам импульсов ИФ 20. Два других измерителя - акселерометры 5 и 6 не накладывают каких-либо ограничений по моментам съема информации. Таким образом, один цикл алгоритма работы (фиг.4-7) процессорного модуля 22 начинается в начале 1 периода Tj, завершается в момент окончания Tj, повторяется для N периодов Tj путем организации цикла J+1≤ N (операция 46).
Операция 2 (фиг.4)
Процессор 24 обращается к каналам АЦП1-5 25 и осуществляет опрос измерителей. Опрос осуществляется в течение времени Tj/2 - первой половины времени Tj; во второй половине времени Tj идет обработка информации. Период Tj имеет выражение [2]:
Tj= 2π/(2πf0-ω)
где fо - опорная частота ИФ 20, ω - задаваемая угловая скорость, 1/с.
Так, например, если f0 = 375 Гц, а ω = от 2•10-3 o/с до 30o/с, то Tj изменяется в пределах от 2 до 4 мс. Длительность одной операции процессора TMS320C25 0,1 мкс. Следовательно, в первую половину периода Tj может быть принято 104 - 2•104 бит информации, считываемой с измерителей 5,6,15, что вполне достаточно для вычислений во второй половине периода Tj соответствующих математических ожиданий (при этом может быть выполнено 104-2•104 операций).
Операции 3-6 (фиг.4)
В первый и второй каналы АЦП 25 (АЦП1 и АЦП2) поступает информация с тангенциального акселерометра 5 в виде напряжения, пропорционального тангенциальному ускорению aτ платформы 2. В операциях 3 и 4 рассчитывается мгновенное значение углового ускорения, как 
где
U
В операции 5 процессор 24 осуществляет интегрирование на периоде Tj углового ускорения (по информации АЦП 1) и расчет среднего значения угловой скорости платформы на промежутке Tj.

В операции 6 процессор 24 рассчитывает математическое ожидание углового ускорения платформы 2 по ri значениям (с АЦП2) на промежутке Tj
Рассчитанные на первом периоде Tj значения средней угловой скорости платформы  и математическое ожидание углового ускорения
и математическое ожидание углового ускорения  хранятся в процессорном модуле 22 (на фиг.1 для простоты не изображены блоки хранения - статическое ОЗУ данных на 32КХ16) до окончания всех операций первого периода Tj. На том же первом периоде Tj в операциях 7-10 осуществляется обработка информации центробежного акселерометра 6.
хранятся в процессорном модуле 22 (на фиг.1 для простоты не изображены блоки хранения - статическое ОЗУ данных на 32КХ16) до окончания всех операций первого периода Tj. На том же первом периоде Tj в операциях 7-10 осуществляется обработка информации центробежного акселерометра 6.
Операция 7 (фиг.4)
В процессоре 24 вычисляется мгновенное значение угловой скорости (по АЦП3)
Действительно, центробежное ускорение 
ацбi = Uцбi/k - ускорение равно напряжению на первом выходе делителя 14 акселерометра 6, деленному на масштабный коэффициент акселерометра 6.
Операция 8. (фиг.4)
Процессор 24 вычисляет математические ожидания угловой скорости  по nj значениям мгновенных угловых скоростей ωцбi на периоде Tj.
по nj значениям мгновенных угловых скоростей ωцбi на периоде Tj.
Операции 9 и 10 (фиг.4)
По информации того же акселерометра 6, считываемой со второго выхода делителя 14 (АЦП4), процессор 24 рассчитывает мгновенное значение ускорения и математическое ожидание на периоде Tj. Формулы приведены на фиг.4.
Операции 11-14 (фиг.4, 5) относятся к обработке информации ДИФ 15.
ДИФ измеряет приращение угла Δαi [2].

где k - оптическая редукция, например, k=212=4096, fо, fсч- опорная частота ИФ 20 и счетная частота БПИ 21 [2], ΔNi - приращение числа импульсов на последующем замере по отношению к предшествующему, определяемое по кодам БПИ 21. Процессор 24 рассчитывает мгновенное значение Δαi, математическое ожидание ΜΔαi на периоде Tj (операция 12), вычисляет математическое ожидание угловой скорости на периоде Tj (операция 13).
 ,
,
вычисляет математическое ожидание углового ускорения платформы 2 по информации ДИФ 15 (операция 14)
Операция 15 (фиг.15) выполняется процессором 24 и заключается в расчете за тот же период Tj математического ожидания информации испытуемого прибора
μi - может представлять собой ток обратной связи, выходное напряжение, число импульсов и т.д., в зависимости от типа испытуемого прибора 3.
Операции 16-32 и 18-42, выполняемые процессором 24, посвящены идентификации "выбросов" в информации измерителей 5,6,15 и выработке в зависимости от результатов идентификации управляющих и информационных сообщений по величине угловой скорости и углового ускорения на периоде Tj. Для этого рассчитываются три контрольные разности между математическими ожиданиями по угловой скорости
Поскольку в стенде заложена избыточность по числу измерителей одной и той же величины (угловой скорости и углового ускорения платформы стенда), то сравнивая путем расчета контрольных разностей математические ожидания угловой скорости (углового ускорения), полученные на одном и том же Tj по показаниям трех измерителей, можно выявить измеритель, дающий "выброс", и исключить на этом периоде Tj его показания из расчета. Перед осуществлением этого исключения (либо неисключения) показаний соответствующего измерителя и формирования управляющих и информационных сообщений по угловой скорости и угловому ускорению на периоде Tj, необходимо произвести проверку: является ли угловая скорость платформы 2 идеально постоянной (т.е.  ) или нет. Если она идеально постоянна, то тангенциальный акселерометр 5, измеряющий тангенциальное ускорение аi и дающий информацию по угловому ускорению
) или нет. Если она идеально постоянна, то тангенциальный акселерометр 5, измеряющий тангенциальное ускорение аi и дающий информацию по угловому ускорению  , на выходе имеет ноль
, на выходе имеет ноль  , поэтому ωi, получаемое интегрированием
, поэтому ωi, получаемое интегрированием  на периоде Tj тоже будет давать ноль (что не соответствует действительности, так как ωi = const и показания тангенциального акселерометра 5 не должны рассматриваться при формировании контрольных разностей ρ1, ρ2, ρ3. . Эта проверка
на периоде Tj тоже будет давать ноль (что не соответствует действительности, так как ωi = const и показания тангенциального акселерометра 5 не должны рассматриваться при формировании контрольных разностей ρ1, ρ2, ρ3. . Эта проверка  выполняется на операции 18.
выполняется на операции 18.
Если  , т.е. угловая скорость ω платформы 2 непостоянна, то выполняется операция 19 и проверяется отличие всех трех контрольных разностей ρ1, ρ2, ρ3 от допуска [ω1] . Например, [ω1] =0,0001o/с, что означает: математические ожидания угловой скорости ωτ, Μωцб, Μωg на периоде Tj, полученные по показаниям трех измерителей, не отличаются более чем на 0,0001o/c, и в расчет могут приниматься все три показания. Тогда выполняется операция 20 и процессор 24 рассчитывает усредненное по трем измерителям математическое ожидание угловой скорости
, т.е. угловая скорость ω платформы 2 непостоянна, то выполняется операция 19 и проверяется отличие всех трех контрольных разностей ρ1, ρ2, ρ3 от допуска [ω1] . Например, [ω1] =0,0001o/с, что означает: математические ожидания угловой скорости ωτ, Μωцб, Μωg на периоде Tj, полученные по показаниям трех измерителей, не отличаются более чем на 0,0001o/c, и в расчет могут приниматься все три показания. Тогда выполняется операция 20 и процессор 24 рассчитывает усредненное по трем измерителям математическое ожидание угловой скорости  на периоде Tj.
на периоде Tj.

и выдает его на ЦАП1 для управления УСТ 17 (операция 33) и передает в ОЗУ ЭВМ 23 (операция 34). Если не все три разности одновременно меньше допуска, то осуществляется проверка каждой из них на тот же критерий (операции 26, 27, 28).
Если ρ2 ≤ [ω1], , то это означает, что центробежный акселерометр 6 и ДИФ 15 не имеют выбросов на такте Ti, и процессор 24 вычисляет (операция 30)  и передает эту величину на ЦАП1 и в ОЗУ ЭВМ. Аналогично, если ρ3 ≤ [ω1] вычисляется
и передает эту величину на ЦАП1 и в ОЗУ ЭВМ. Аналогично, если ρ3 ≤ [ω1] вычисляется  , а если ρ1 ≤ [ω1] вычисляется
, а если ρ1 ≤ [ω1] вычисляется  и передается на ЦАП1 и в ОЗУ ЭВМ. Если проверка
и передается на ЦАП1 и в ОЗУ ЭВМ. Если проверка  , (операция 18) показала постоянство угловой скорости платформы 2, т.е.
, (операция 18) показала постоянство угловой скорости платформы 2, т.е.  , то это означает, что нельзя пользоваться контрольной разностью, содержащей показания по угловой скорости тангенциального акселерометра 5, а процессор 24 осуществляет проверку (операция 21) показаний двух других измерителей, т. е. проверяется, несколько близки к нулю угловые ускорения на периоде Ti, полученные по показаниям центробежного акселерометра 6 и ДИФ 15, т. е. либо Με″ = 0 и Με″′= 0 выполняется одновременно (операция 21), что означает, что оба измерителя 6 и 15 одинаково достоверны, тогда управляющее и информационное сообщения строятся по операции 30
, то это означает, что нельзя пользоваться контрольной разностью, содержащей показания по угловой скорости тангенциального акселерометра 5, а процессор 24 осуществляет проверку (операция 21) показаний двух других измерителей, т. е. проверяется, несколько близки к нулю угловые ускорения на периоде Ti, полученные по показаниям центробежного акселерометра 6 и ДИФ 15, т. е. либо Με″ = 0 и Με″′= 0 выполняется одновременно (операция 21), что означает, что оба измерителя 6 и 15 одинаково достоверны, тогда управляющее и информационное сообщения строятся по операции 30  и передается в ЦАП1 ОЗУ ЭВМ. Если Με″ = 0 и Με″′= 0 одновременно не выполняются, то процессор 24 сравнивает с допуском [ε1] каждое из математических ожиданий (операции 22, 23, 24 и 25). Если математическое ожидание Με″ ближе к нулю, то на управление в ЦАП1 и в ОЗУ ЭВМ передается
и передается в ЦАП1 ОЗУ ЭВМ. Если Με″ = 0 и Με″′= 0 одновременно не выполняются, то процессор 24 сравнивает с допуском [ε1] каждое из математических ожиданий (операции 22, 23, 24 и 25). Если математическое ожидание Με″ ближе к нулю, то на управление в ЦАП1 и в ОЗУ ЭВМ передается  . Если ближе к нулю Με″′ , то на управление в ЦАП 1 и в ОЗУ ЭВМ передается
. Если ближе к нулю Με″′ , то на управление в ЦАП 1 и в ОЗУ ЭВМ передается  (операции 24, 25). Одновременно на том же Tj в ОЗУ ЭВМ передается математическое ожидание Μμ информации испытуемого прибора. Аналогично осуществляется процессором анализ контрольных разностей ρ4,ρ5,ρ6 по угловому ускорению платформы (операции 35, 37, 39, 41) и формирование управляющих и информационных сообщений (операции 36, 38, 40, 42), передаваемых на управление ЦАП2 (операция 44) и в ОЗУ ЭВМ (операция 34). Все вычисления на период Tj заканчиваются при поступлении от БПИ 21 команды "конец чтения" (операция 45), которая в виде кода передается через ППИ 27 в процессор 24. В работе процессора 24 организован цикл j+1≤N, т. е. все операции повторяются на N периодах Tj. Если угловая скорость превышает 30o/c, то от ЭВМ 23 выдается команда на переход к работе по алгоритму (фиг. 8). При этом первые 10 операций алгоритма по фиг. 4, выделенные в подпрограмму 1, сохраняются, т. е. сбор и обработка на каждом периоде Tj информации тангенциального акселерометра 5 и центробежного акселерометра 6. Показания ДИФ 15 из обработки исключаются, так как ДИФ 15 [2] при больших угловых скоростях имеет значительную динамическую погрешность. Алгоритм работы значительно упрощается, и это обусловлено отсутствием необходимости "жесткого" выявления и исключения "выбросов" на больших скоростях платформы 2. Сохраняются операции 15, 32, 33, 34, 42, 44, 45, описанные выше. Это означает, что в качестве управляющих и информационных сообщений, передаваемых от процессора 24 на ЦАП1 и ЦАП2 и в ОЗУ ЭВМ, используются соответственно
(операции 24, 25). Одновременно на том же Tj в ОЗУ ЭВМ передается математическое ожидание Μμ информации испытуемого прибора. Аналогично осуществляется процессором анализ контрольных разностей ρ4,ρ5,ρ6 по угловому ускорению платформы (операции 35, 37, 39, 41) и формирование управляющих и информационных сообщений (операции 36, 38, 40, 42), передаваемых на управление ЦАП2 (операция 44) и в ОЗУ ЭВМ (операция 34). Все вычисления на период Tj заканчиваются при поступлении от БПИ 21 команды "конец чтения" (операция 45), которая в виде кода передается через ППИ 27 в процессор 24. В работе процессора 24 организован цикл j+1≤N, т. е. все операции повторяются на N периодах Tj. Если угловая скорость превышает 30o/c, то от ЭВМ 23 выдается команда на переход к работе по алгоритму (фиг. 8). При этом первые 10 операций алгоритма по фиг. 4, выделенные в подпрограмму 1, сохраняются, т. е. сбор и обработка на каждом периоде Tj информации тангенциального акселерометра 5 и центробежного акселерометра 6. Показания ДИФ 15 из обработки исключаются, так как ДИФ 15 [2] при больших угловых скоростях имеет значительную динамическую погрешность. Алгоритм работы значительно упрощается, и это обусловлено отсутствием необходимости "жесткого" выявления и исключения "выбросов" на больших скоростях платформы 2. Сохраняются операции 15, 32, 33, 34, 42, 44, 45, описанные выше. Это означает, что в качестве управляющих и информационных сообщений, передаваемых от процессора 24 на ЦАП1 и ЦАП2 и в ОЗУ ЭВМ, используются соответственно ,
,
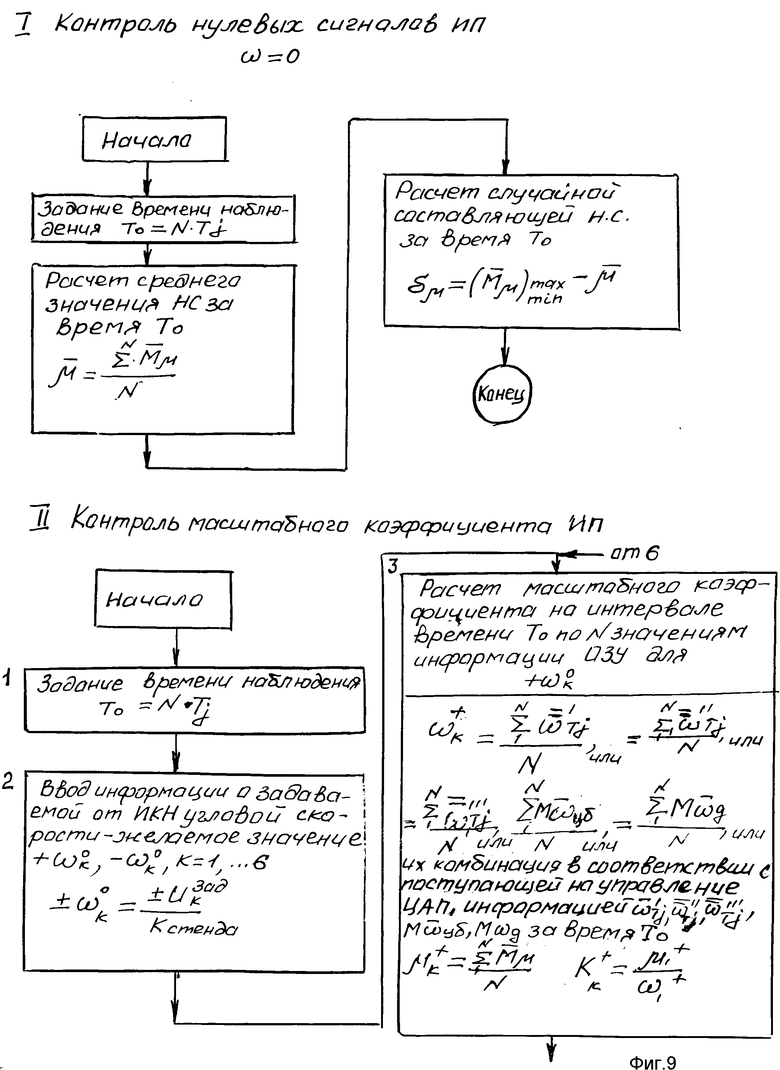
На фиг. 9 - 10 представлен алгоритм работы ЭВМ 23 в составе стенда при контроле, например, двух основных параметров - нулевого сигнала и масштабного коэффициента испытуемого прибора 3.
Контроль нулевых сигналов
ЭВМ задает время наблюдения T0=NTj, рассчитывает среднее значение нулевого сигнала за время T0: ,
,
при этом используется массив из N значений математических ожиданий  , переданный от процессора 24 в ОЗУ ЭВМ и хранящийся в нем. Рассчитывается случайная составляющая нулевого сигнала, как максимум и минимум отклонения от среднего
, переданный от процессора 24 в ОЗУ ЭВМ и хранящийся в нем. Рассчитывается случайная составляющая нулевого сигнала, как максимум и минимум отклонения от среднего  :
:
Контроль масштабного коэффициента
Задается в ЭВМ 23 величина периода наблюдения T0=NTj. Сама задаваемая угловая скорость устанавливается оператором вручную путем задания от ИКН 19 на третий вход сумматора 18 соответствующего напряжения ± U , где k=1 - 6. Обычно проверки осуществляются на шести скоростях, при двух направлениях +(-) для каждой скорости. По массиву из N значений математических ожиданий угловой скорости на каждом периоде Tj, хранящемуся в ОЗУ ЭВМ 23, рассчитывается средняя на периоде T0 угловая скорость:
, где k=1 - 6. Обычно проверки осуществляются на шести скоростях, при двух направлениях +(-) для каждой скорости. По массиву из N значений математических ожиданий угловой скорости на каждом периоде Tj, хранящемуся в ОЗУ ЭВМ 23, рассчитывается средняя на периоде T0 угловая скорость:
(берется та информация по совокупности N математических ожиданий, которая передана в ОЗУ ЭВМ на каждом периоде Tj). Аналогично рассчитывается средняя угловая скорость ω . Рассчитываются значения масштабного коэффициента K
. Рассчитываются значения масштабного коэффициента K
Операция 5 (фиг. 10).
Рассчитывают средние значения:
Организован цикл k+1≤6 для всех задаваемых угловых скоростей. По полученному массиву Kkk= 1 - 6 рассчитывают среднее значение масштабного коэффициента испытуемого прибора 3 (операция 7, фиг. 10) и отклонения от среднего (нестабильность характеристики масштабного коэффициента (операция 8, фиг. 10). Все рассчитанные параметры выводятся на печать.
Источники информации
1. Смолянский Г.А., Прядилов Ю.Н. Поплавковые гироскопы и их применение. - М.: 1958, с. 178 - 190.
2. Фотоэлектрические преобразователи информации/ Под. ред. М.Н. Преснухина. - М.: Машиностроение, 1974, с. 294 - 309.
3. Ахметжанов А.А. Системы передачи угла повышенной точности. -М. - Л.: Энергия, 1966.
4. Дубенский А.А. Бесконтактные двигатели постоянного тока. - М.: Энергия, 1967.
5. Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. - М.: Радио и связь, 1991.
6. Высокоточные преобразователи угловых перемещений /Под. ред. Ахметжанова А.А. - М.: Энергоиздат, 1986, с. 77 - 92.
7. Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода. - М.: Машиностроение, 1984, с. 73.
8. Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров. - М.: Машиностроение, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |






Использование: в измерительной технике. Сущность изобретения: стенд для контроля измерителей угловых скоростей (ИУС), содержит корпус, платформу на оси стенда, электродвигатель постоянного тока, коллектор, два кварцевых маятниковых акселерометра, каждый из которых содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные через соответствующие усилители обратной связи, выходные каскады которых выполнены в виде делителей напряженя, при этом корпус первого акселерометра закреплен на платформе стенда так, что его ось чувствительности перпендикулярна радиусу платформы, а корпус второго акселерометра закреплен так, что ось его чувствительности расположена вдоль радиуса платформы, усилитель системы стабилизации с сумматором, входящим в его состав, фотоэлектрический муаровый датчик угла, интерполятор фазовый и блок преобразования информации фотоэлектрического датчика угла, процессорный модуль, содержащий пятиканальный аналогово-цифровой преобразователь (АЦП), двухканальный цифроаналоговый преобразователь (ЦАП), унифицированный параллельный 16-разрядный интерфейс, а также процессор и электронно-вычислительную машину (ЭВМ). 10 ил.
Стенд для контроля измерителей угловых скоростей, содержащий корпус, платформу, установленную с возможностью вращения на оси стенда, электродвигатель постоянного тока, коллектор, отличающийся тем, что введены источник калиброванного напряжения, два кварцевых маятниковых акселерометра, усилитель системы стабилизации с сумматором, последовательно соединенные фотоэлектрический муаровый датчик угла, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, а также процессорный модуль, состоящий из пятиканального аналого-цифрового преобразователя, двухканального цифроаналогового преобразователя, унифицированного параллельного шестнадцатиразрядного интерфейса, процессора и ЭВМ, причем акселерометры закреплены на платформе, ось чувствительности первого акселерометра перпендикулярна радиусу платформы, ось чувствительности второго акселерометра расположена вдоль радиуса платформы, каждый акселерометр содержит корпус, кварцевую пластину, емкостный датчик угла и магнитоэлектрический датчик момента, соединенные через усилитель обратной связи, выходной каскад которого выполнен в виде делителя напряжения, при этом первый вход сумматора соединен с выходом первого канала цифроаналогового преобразователя, второй вход сумматора соединен с выходом второго канала цифроаналогового преобразователя, третий вход сумматора соединен с выходом источника калиброванных напряжений, выход сумматора соединен с первым входом усилителя стабилизации, первый и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим входами усилителя стабилизации, первый и второй выходы делителя напряжений в выходной цепи усилителя обратной связи первого акселерометра соединены соответственно с входами первого и второго каналов аналого-цифрового преобразователя, первый и второй выходы делителя напряжений в выходной цепи усилителя обратной связи второго акселерометра соединены соответственно с входами третьего и четвертого каналов аналого-цифрового преобразователя, выход испытуемого прибора соединен с входом пятого канала аналого-цифрового преобразователя, выход блока преобразователя информации соединен с входом унифицированного параллельного шестнадцатиразрядного интерфейса, выходы пяти каналов аналого-цифрового преобразователя, входы двух каналов цифроаналогового преобразователя и выход унифицированного параллельного шестнадцатиразрядного интерфейса соединены с процессором через внутреннюю шину процессорного модуля, а процессорный модуль соединен с ЭВМ через шестнадцатиразрядный портовый интерфейс.
| SU, авторское свидетельство, 476516, G 01 P 21/00, 1975 | |||
| SU, авторское св идетельство, 1136085, G 01 P 21/00, 1985 | |||
| SU, авторское свидетельство , 172 0023, G 01 P 21/00, 1992 | |||
| SU, авторское свидетельство, 1793385, G 01 P 21/ 00, 1993 | |||
| SU, авторское свидетельство, 459735, G 01 P 21/00 , 1975. |
