Изобретение относится к космической технике, в частности к системам ориентации космических аппаратов в пространстве с использованием солнечнодинамических поверхностей.
Известно, что на гелиоцентрической орбите ориентация космического аппарата на Солнце может поддерживаться силами светового давления.
Известен способ и система ориентации космического аппарата с использованием солнечнодинамических поверхностей, состоящая, по крайней мере, из пары солнечных стабилизаторов, выполненных из надувной оболочки и приклеенных на длинной штанге к корпусу космического аппарат (КА). При воздействии солнечного давления на поверхности стабилизаторов будет возникать восстанавливающий момент, что позволяет стабилизировать положение космического аппарата в пространстве [1]
Наиболее близким техническим решением является известная система ориентации космического аппарата в пространстве с использованием солнечнодинамических поверхностей, содержащая, по крайней мере, пару солнечнодинамических поверхностей, симметрично установленных на корпусе КА с возможностью поворота относительно тангенциальной и радиальной осей КА на заданные углы, соответственно α1 и α2[2]
Недостатком известных технических решений является то, что они не допускают выбора алгоритма управления угловым движением космического аппарата.
Конструктивные требования к космическим аппаратам (КА) предопределяются научными задачами, стоящими перед данным полетом.
В представленных материалах заявки рассматривается космический аппарат, предназначенный для исследования Солнца с близкого расстояния.
Условия полета и задачи, стоящие перед КА, ставят противоречивые и трудновыполнимые требования перед конструкторами. Чрезвычайно высокие требования предъявляются к точностям ориентации и стабилизации КА, обеспечению устойчивой радиосвязи с КА, так как основным назначением данного КА является изучение Солнечной короны.
Техническими задачами данного изобретения является расширение возможности управления ориентацией космического аппарата, что улучшает условия затенения конструктивных элементов, расположенных внутри космического аппарата, обеспечивает устойчивую и более продолжительную радиосвязь с Землей, что, в свою очередь, позволяет получить более полную информацию об исследуемом пространстве с датчиков и приборов, установленных на космическом аппарате.
Поставленная задача решается тем, что в способе ориентации космического аппарата в пространстве с использованием солнечнодинамических поверхностей, заключающемся в том, что продольную ось космического аппарата ориентируют в заданном направлении путем отклонения солнечнодинамических поверхностей в тангенциальном и радиальном направлениях на заданные углы, соответственно α1 и α2, после чего солнечнодинамические поверхности возвращают в нейтральное положение, на заданном участке орбиты продольную ось космического аппарата направляют на Солнце путем отклонения солнечнодинамических поверхностей на угол  , закручивают космический аппарат до заданной угловой скорости ω3, после чего возвращают солнечнодинамические поверхности в нейтральное положение, на следующем заданном участке орбиты продольную ось космического аппарата направляют перпендикулярно плоскости орбиты путем отклонения солнечнодинамических поверхностей на углы
, закручивают космический аппарат до заданной угловой скорости ω3, после чего возвращают солнечнодинамические поверхности в нейтральное положение, на следующем заданном участке орбиты продольную ось космического аппарата направляют перпендикулярно плоскости орбиты путем отклонения солнечнодинамических поверхностей на углы  , после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечнодинамические поверхности возвращают в нейтральное положение, в районе перигелия продольную ось космического аппарата направляют на Землю путем отклонения солнечнодинамических поверхностей на углы
, после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечнодинамические поверхности возвращают в нейтральное положение, в районе перигелия продольную ось космического аппарата направляют на Землю путем отклонения солнечнодинамических поверхностей на углы  и удерживают в данном положении в течение сеанса связи с Землей, после чего солнечнодинамические поверхности возвращают в нейтральное положение, при этом угол поворота солнечнодинамических поверхностей
и удерживают в данном положении в течение сеанса связи с Землей, после чего солнечнодинамические поверхности возвращают в нейтральное положение, при этом угол поворота солнечнодинамических поверхностей  равен
равен
а угол
где s площадь солнечнодинамической поверхности;
n количество солнечнодинамических поверхностей;
ω1 радиальная составляющая угловой скорости прецессии космического аппарата;
ω2 тангенциальная составляющая угловой скорости прецессии космического аппарата;
ω3 угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
ro расстояние от продольной оси КА до тангенциальной оси вращения солнечнодинамической поверхности;
φ удельный поток солнечного излучения;
C скорость света в вакууме;
ac коэффициент поглощения солнечного излучения;
d расстояние от тангенциальной оси вращения до центра давления солнечнодинамической поверхности.
При этом в устройстве ориентации космического аппарата в пространстве (фиг.1), содержащем, по крайней мере, пару солнечнодинамических поверхностей 1, установленных симметрично на корпусе 2 космического аппарата 3 с возможностью поворота относительно радиальной и тангенциальной осей космического аппарата, площадь S солнечнодинамических поверхностей выполнена равной:
где n количество солнечнодинамических поверхностей;
ω3 угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
R расстояние от продольной оси космического аппарата до центра давления солнечнодинамической поверхности;
φ удельный поток солнечного излучения;
C скорость света в вакууме;
aC коэффициент поглощения солнечного излучения;
tз расчетное время режима закрутки.
Главными задачами, стоящими перед данным полетом, являются: изучение электромагнитных полей и частиц вблизи от Солнца, проведение фундаментальных экспериментов в области гравитации и релятивистской механики, изучение структуры солнечной атмосферы от фотосферы до короны и множество других. И вся полученная информация должна быть передана на Землю. Более длительная радиосвязь с Землей позволит решить стоящие перед данным полетом задачи передачей всей полученной информации на Землю.
Во время прохождения перигелия орбиты космический аппарат находится на расстоянии 147-153 млн.км от Земли.
На заключительном этапе полета при подлете к короне Солнца управление космическим аппаратом осуществляется по заданному алгоритму с помощью солнечнодинамических поверхностей.
Это позволяет расширить возможность управления ориентацией аппарата, благодаря чему возможны изменения в программе полета автоматического космического аппарата (АКА) на конечных участках.
Солнечнодинамические поверхности, поворачиваясь и отклоняясь на определенные углы a1 и α2 по заданной программе от привода управления, обеспечивают маневрирование и создание прецессии космического аппарата под действием сил солнечного излучения. Площадь данных солнечнодинамических поверхностей позволяет управлять ориентацией космического аппарата в потоке солнечного излучения посредством отклонения оси солнечнодинамической поверхности от поперечной связанной плоскости на угол α1 и поворота солнечнодинамической поверхности вокруг своей оси на угол α2, тем самым достигается управляемое изменение действующих на космический аппарат сил и моментов. Таким образом, можно добиться устойчивого положения раскрученного космического аппарата по отношению к Солнцу, когда боковая поверхность его (внешнего теплозащитного экрана) корпуса при движении по орбите постоянно развернута к Солнцу. А это приводит к тому, что все конструктивные элементы, расположенные внутри космического аппарата, находятся в постоянном затенении.
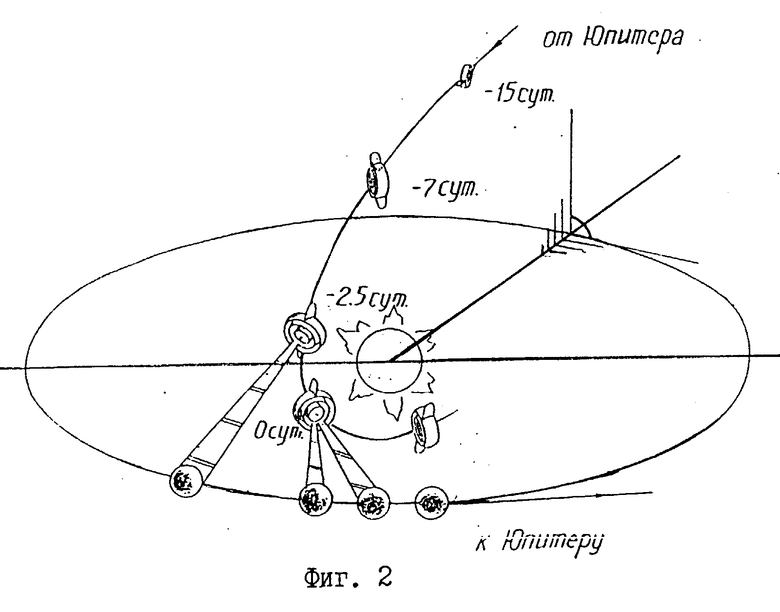
В момент прохождения космическим аппаратом перигелия своей орбиты диаграмма направленности антенны космического аппарата, стабилизируемого вращением, должна удерживать направление на Землю в течение всего участка проведения научных измерений. Создание прецессии с помощью управления солнечнодинамическими поверхностями, отклонением их на углы  обеспечивает отслеживание Земли в зоне видимости диаграммы направленности антенны, что позволяет увеличить радиосвязь с Землей до 3-4 суток.
обеспечивает отслеживание Земли в зоне видимости диаграммы направленности антенны, что позволяет увеличить радиосвязь с Землей до 3-4 суток.
На фиг. 1 показано устройство ориентации космического аппарата в пространстве.
На фиг.2 показана схема полета космического аппарата.
Предложенный способ ориентации космического аппарата 3 в пространстве с использованием солнечнодинамических поверхностей 1 осуществляется следующим образом (фиг.1).
После отделения космического аппарата от траекторного блока по программе полета требуется закрутить космический аппарат. Для этого продольную ось космического аппарата 3 направляют на Солнце путем отклонения солнечнодинамических поверхностей 1 на угол  . Это является наиболее рациональным условием для проведения раскрутки космического аппарата, так как формируется статически устойчивая конфигурация космического аппарата в потоке солнечного излучения. После чего производят закрутку космического аппарата до заданной угловой скорости ω3. Достигнув заданной угловой скорости ω3, солнечнодинамические поверхности возвращают в нейтральное положение.
. Это является наиболее рациональным условием для проведения раскрутки космического аппарата, так как формируется статически устойчивая конфигурация космического аппарата в потоке солнечного излучения. После чего производят закрутку космического аппарата до заданной угловой скорости ω3. Достигнув заданной угловой скорости ω3, солнечнодинамические поверхности возвращают в нейтральное положение.
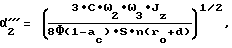
На следующем заданном участке орбиты продольную ось космического аппарата направляют перпендикулярно плоскости орбиты путем отклонения солнечнодинамических поверхностей 1 на углы  , после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечнодинамические поверхности возвращают в нейтральное положение. Это позволяет получить устойчивое положение на корпусе 2 космического аппарата 3 с возможностью поворота. Площадь солнечнодинамических пластин 1 задана равной:
, после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечнодинамические поверхности возвращают в нейтральное положение. Это позволяет получить устойчивое положение на корпусе 2 космического аппарата 3 с возможностью поворота. Площадь солнечнодинамических пластин 1 задана равной:
где n количество солнечнодинамических поверхностей;
ω3 расчетная угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
ro расстояние от продольной оси космического аппарата до тангенциальной оси вращения солнечнодинамической поверхности;
d расстояние от тангенциальной оси вращения до центра давления солнечнодинамической поверхности;
φ удельный поток солнечного излучения;
C скорость света в вакууме;
aC коэффициент поглощения солнечного излучения;
tз расчетное время режима закрутки.
Выполнение солнечнодинамических поверхностей площадью S позволяет управлять ориентацией космического аппарата в потоке солнечного излучения посредством отклонения солнечнодинамических пластин от поперечной связанной плоскости на угол a1 (на заданных участках орбиты на угол  )и поворота пластины вокруг своей оси на угол α2 (на заданных участках орбиты на углы
)и поворота пластины вокруг своей оси на угол α2 (на заданных участках орбиты на углы  ), тем самым достигается управляемое изменение действующих на космический аппарат сил и раскрученного космического аппарата по отношению к Солнцу, когда боковая поверхность его внешнего теплозащитного экрана при движении по орбите постоянно разворачивается в сторону Солнца. А это приводит к тому, что все конструктивные элементы, расположенные внутри космического аппарата, находятся в постоянном затенении от экрана.
), тем самым достигается управляемое изменение действующих на космический аппарат сил и раскрученного космического аппарата по отношению к Солнцу, когда боковая поверхность его внешнего теплозащитного экрана при движении по орбите постоянно разворачивается в сторону Солнца. А это приводит к тому, что все конструктивные элементы, расположенные внутри космического аппарата, находятся в постоянном затенении от экрана.
В момент прохождения космическим аппаратом перигелия своей орбиты диаграмма направленности антенны космического аппарата (фиг.2), стабилизируемого вращением, должна удерживать направление на Землю в течение всего участка проведения научных измерений. Для этого продольную ось космического аппарата направляют на Землю путем отклонения солнечнодинамических поверхностей на углы  и отслеживают заданное направление в течение сеанса связи с Землей, после чего солнечнодинамические поверхности возвращают в нейтральное положение, создавая управляемую прецессию продольной оси космического аппарата и, собственно, электрической оси антенны, что увеличивает длительность радиосвязи с Землей в 2-3 раза. При этом углы поворота солнечнодинамических поверхностей
и отслеживают заданное направление в течение сеанса связи с Землей, после чего солнечнодинамические поверхности возвращают в нейтральное положение, создавая управляемую прецессию продольной оси космического аппарата и, собственно, электрической оси антенны, что увеличивает длительность радиосвязи с Землей в 2-3 раза. При этом углы поворота солнечнодинамических поверхностей  равны соответственно:
равны соответственно:
где S площадь солнечнодинамической поверхности;
n количество солнечнодинамических поверхностей;
ω1 радиальная составляющая угловой скорости прецессии космического аппарата;
ω2 тангенциальная составляющая угловой скорости прецессии космического аппарата;
ω3 угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
ro расстояние от продольной оси КА до тангенциальной оси вращения солнечнодинамической поверхности;
φ удельный поток солнечного излучения;
C скорость света в вакууме;
aC коэффициент поглощения солнечного излучения;
d расстояние от тангенциальной оси вращения до центра давления солнечнодинамической поверхности.
С точки зрения предварительной проверки работоспособности предлагаемых конструктивных решений представляют интерес численные оценки параметров динамики космического аппарата (КА) на последних участках перелета от Юпитера к Солнцу. Для получения оценок использована математическая модель в предположениях, что центр масс КА движется по кеплеровой траектории, а в угловом движении аппарат предполагался твердым телом с упругодемпферными элементами. Поток солнечных лучей предполагался параллельным.
Траектория центра масс задавалась уравнением:
r расстояние от центра Солнца до центра масс СЗ;
P фокальный параметр траектории;
e эксцентриситет траектории;
n истинная аномалия.
Время движения (с условным началом отсчета в точке перигелия) определялось в виде
где μs гравитационная константа Солнца.
При определении углового положения КА использованы две системы координат: орбитальная с началом O в притягивающем центре осью OX, направленной к центру масс КА, осью OY, ориентированной вдоль вектора угловой скорости орбитального движения, и осью OZ, дополняющей систему до правой ортогональной, связанная OX1Y1Z1 с началом в центре симметрии КА (номинальном центре масс), осью OX1, совпадающей с продольной строительной осью КА, осью OZ1, ориентированной вдоль линии осей полностью раскрытых пластин, и осью OY1, дополняющей систему до правой ортогональной.
Ориентация осей связанной системы координат (ССК) в орбитальной ОСК, т. е. ориентация аппарата определялась с помощью матрицы направляющих косинусов А, элементы которой есть координаты ортов  орбитальной системы в связанной системе координат:
орбитальной системы в связанной системе координат:
Изменение матрицы A во времени дается уравнением
где ωx1, ωy1, ωz1 координаты вектора угловой скорости ИСЗ в связанной системе координат.
Описание динамики вращения КА около центра масс представлено в форме уравнений Эйлера:
Здесь Jx, Jy, Jz моменты инерции СЗ относительно осей OX1, OY1, OZ1 соответственно:
Mx1, My1, Mz1 проекции вектора суммы внешних моментов на связанные оси OX1, OY1, OZ1 соответственно;
Jxy, Jxz, Jyx, Jzx, Jzy центробежные моменты инерции СЗ.
Из группы внешних моментов в моделировании учитывался только момент от солнечного излучения, поскольку величины прочих моментов меньше интервала неопределенности первого.
В основе математического описания момента от солнечного излучения - следующее представление воздействия электромагнитного излучения на выносные управляемые (отклоняемые) пластины. Сила, действующая на плоскую пластину со стороны потока ЭМ-излучения, ориентированная под угломα к этому потоку, раскладывается на две компоненты, выражаемые в виде
где Fп, Fн компоненты силы, направленные вдоль потока излучения и нормально к потоку соответственно;
φ поток лучистой энергии, падающей на пластину;
ac коэффициент поглощения (принят равным 0,5);
S площадь пластины;
C скорость света в вакууме.
Конструкция солнечнодинамических поверхностей, смонтированных на КА, позволяет управлять их ориентацией в потоке лучей посредством отклонения оси солнечнодинамической поверхности от поперечной связанной плоскости на угол a1 и поворота пластины вокруг своей оси на угол α2, тем самым достигается управляемое изменение действующих на КА силы и момента.
Направление солнечных лучей совпадает с направлением  оси OX орбитальной системы и задается строкой матрицы косинусов A. Это позволяет при известных углах отклонения солнечнодинамических поверхностей α1, α11 определить в С.С.К. составляющие сил, действующих на солнечнодинамические поверхности, и выразить составляющие вектора момента от солнечного излучения.
оси OX орбитальной системы и задается строкой матрицы косинусов A. Это позволяет при известных углах отклонения солнечнодинамических поверхностей α1, α11 определить в С.С.К. составляющие сил, действующих на солнечнодинамические поверхности, и выразить составляющие вектора момента от солнечного излучения.
где ro расстояние от продольной оси КА до тангенциальной оси вращения солнечнодинамической поверхности;
d расстояние от центра вращения пластины до ее центра давления.
Уравнения углового движения (1.4), (1.5) численно решались совместно с уравнениями траектории (1.1) и (1.2), полученные результаты обсуждаются ниже в последовательности участков полета.
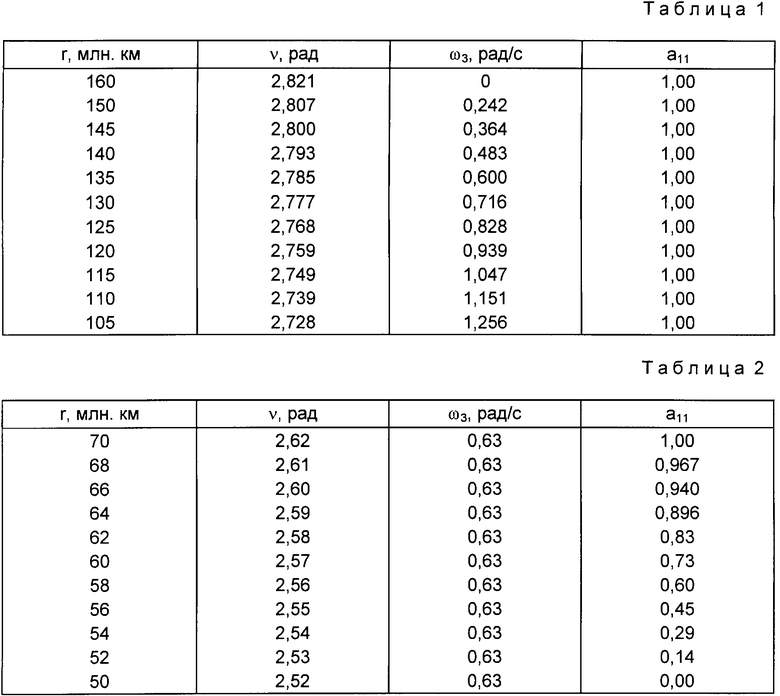
Раскрутка КА от солнечного излучения моделировалась для обращенной траектории, началом которой взят поздний из допустимых моментов окончания раскрутки аппарата вблизи радиуса орбиты Венеры. В табл. 2 даны результаты вычислений: компоненты угловой скорости в ССК и направляющие косинусы a11, a12, a13 вектора "Солнце-С3".
Моделирование процесса разворота оси вращения СЗ в положение нормали к плоскости орбиты выполнено для худшего случая, наиболее длительного разворота, когда начальное положение оси вращения совпадает с направлением "Солнце-КА". Численные результаты представлены в табл. 2, содержание колонок аналогично табл. 1
На заключительном участке траектории "Юпитер-Солнце" представляет интерес оценка возможности обеспечения прецессии оси вращения КА для отслеживания осью антенны направления на Землю. При этом величины двух составляющих угловой скорости прецессии, лежащих: одна в плоскости эклиптики, вторая на нормали к этой плоскости, для удаления r≤0.38 а.е. не превосходят, соответственно, 1,07 град/сут и 0,1 град/сут. По предварительной аналитической оценке такая прецессия оси СЗ может быть создана отклонением поверхности на углы α1, α11 в пределах от 0,25o до 1,5o.
Предложенный способ ориентации космического аппарата в пространстве реализуется устройством ориентации космического аппарата, содержащим, по крайней мере, пару солнечнодинамических поверхностей 1, установленных симметрично моментов. Таким образом, предложенный способ ориентации космического аппарата в пространстве и устройство для его реализации позволяет решить главные задачи, стоящие перед полетом космического аппарата по заданной орбите полета: расширяет возможности управления ориентацией космического аппарата в пространстве, что улучшает условия затенения конструктивных элементов, расположенных внутри КА, и обеспечивает устойчивую и более продолжительную радиосвязь с Землей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2309876C1 |
| СПОСОБ ПРОВЕДЕНИЯ СЪЕМОК ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2001 |
|
RU2232110C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ РАЗГОНА КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ СОЛНЕЧНОГО ПАРУСА | 1999 |
|
RU2209748C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2020 |
|
RU2764815C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2587663C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539271C2 |
Изобретение относится к космической технике, в частности к системам ориентации космических аппаратов (КА) с использованием солнечнодинамических поверхностей (СДП). Продольную ось КА ориентируют в заданном направлении, отклоняя СДП в тангенциальном и радиальном направлениях, а затем возвращая их в нейтральное положение; при этом с некоторого момента данную ось КА направляют на Солнце и закручивают КА вокруг этой оси; на следующем участке полета продольную ось КА направляют, создавая прецессию КА путем отклонения СДП, перпендикулярно плоскости орбиты, а в районе перигелия эту ось ориентируют на Землю и отслеживают это направление в течение сеанса связи с Землей, после чего возвращают СДП в нейтральное положение. Устройство содержит не менее двух СДП, установленных симметрично на корпусе КА с возможностью поворота по двум осям; площадь СДП выбрана в соответствии с режимом вышеуказанных операций. 2 с.п. ф-лы, 2 ил., 2 табл.
 после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечно-динамические поверхности возвращают в нейтральное положение, в районе перигелия продольную ось космического аппарата направляют на Землю путем отклонения солнечно-динамических поверхностей на углы
после прецессии продольной оси космического аппарата в положение, перпендикулярное плоскости орбиты, солнечно-динамические поверхности возвращают в нейтральное положение, в районе перигелия продольную ось космического аппарата направляют на Землю путем отклонения солнечно-динамических поверхностей на углы  и отслеживают заданное направление в течение сеанса связи с Землей, после чего солнечно-динамические поверхности возвращают в нейтральное положение, при этом углы поворота солнечно-динамических поверхностей
и отслеживают заданное направление в течение сеанса связи с Землей, после чего солнечно-динамические поверхности возвращают в нейтральное положение, при этом углы поворота солнечно-динамических поверхностей  выбирают равными
выбирают равными
где  углы поворота солнечно-динамической поверхности относительно тангенциальной оси космического аппарата;
углы поворота солнечно-динамической поверхности относительно тангенциальной оси космического аппарата; углы поворота солнечно-динамической поверхности относительно радиальной оси космического аппарата;
углы поворота солнечно-динамической поверхности относительно радиальной оси космического аппарата;
S площадь солнечно-динамической поверхности;
n количество солнечно-динамических поверхностей;
ω1 - радиальная составляющая угловой скорости прецессии космического аппарата;
ω2 - тангенциальная составляющая угловой скорости прецессии космического аппарата;
ω3 - угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
rо расстояние от продольной оси аппарата до тангенциальной оси вращения солнечно-динамической поверхности;
Φ - удельный поток солнечного излучения;
C скорость света в вакууме;
ac коэффициент поглощения поверхностями солнечного излучения;
d расстояние от тангенциальной оси вращения до центра давления солнечно-динамической поверхности.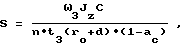
где n количество солнечно-динамических поверхностей;
ω3 - расчетная угловая скорость закрутки космического аппарата относительно продольной оси;
Jz момент инерции космического аппарата относительно продольной оси;
rо расстояние от продольной оси космического аппарата до тангенциальной оси вращения солнечно-динамической поверхности;
d расстояние от тангенциальной оси вращения до центра давления солнечно-динамической поверхности;
Φ - удельный поток солнечного излучения;
C скорость света в вакууме;
ac коэффициент поглощения поверхностями солнечного излучения;
tз расчетное время режима закрутки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сидоренко В.В | |||
| О вращательном движении космического аппарата с солнечным стабилизатором | |||
| Космические исследования | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
