Изобретение относится к области космической техники и может быть использовано при управлении ориентацией космических аппаратов (КА) при проведении работ в условиях вращательного движения.
Вращательное движение КА используется, например, при проведении экспериментов и исследований в области микрогравитации и реализуется закрутками КА вокруг направлений, задаваемых в строительной системе координат КА.
Рассматриваем КА типа транспортных грузовых кораблей (ТГК), совершающих миссии к космической орбитальной станции - например, к международной космической станции. На данных КА исследования удобно проводить на этапе их автономного полета после отстыковки от орбитальной станции.
Известен способ управления ориентацией КА, включающий выставку осей КА и поддержание углового положения с помощью двигателей ориентации (Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974). Однако для использования данного способа необходимо расходовать рабочее тело, что вызывает, кроме того непрогнозируемые микроускорения на борту КА.
Известен способ управления ориентацией КА с неподвижными панелями солнечных батарей при выполнении экспериментов на орбитах с максимальной длительностью теневого участка (Патент РФ №2457158, приоритет от 22.09.2010, МПК (2006.01) B64G 1/24, 1/44), включающий гравитационную ориентацию КА и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, при нахождении Солнца вблизи к плоскости орбиты совмещают эту плоскость с плоскостью СБ к моменту прохождения утреннего терминатора, измеряют и отслеживают угол между перпендикуляром к активной (рабочей) поверхности СБ и направлением на Солнце, в момент прохождения утреннего терминатора осуществляют закрутку КА в направлении, соответствующем уменьшению указанного угла, причем угловую скорость закрутки выбирают из задаваемого диапазона значений. Способ позволяет обеспечить некоторое освещение СБ и приход электроэнергии для проведения неэнергоемких экспериментов. При этом солнечное излучение поступает на СБ с направлений, существенно отстоящих от нормали в рабочей поверхности СБ, вследствие чего генерируемый СБ ток существенно отличается от максимального тока, который способны генерировать СБ. В то же время при выполнении ряда экспериментов, в том числе, по росту кристаллов, нужно обеспечить большой съем электроэнергии с СБ, т.к. для проведения таких экспериментов используется энергоемкая аппаратура.
Наиболее близким к предлагаемому, прототипом, является способ (Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях». М.: Машиностроение, 1984), включающий разворот ТГК, нормаль к рабочей поверхности СБ которого совпадает с одной из главных осей инерции, до совмещения направления нормали к рабочей поверхности СБ с направлением на Солнце и закрутку ТГК вокруг данной оси. Способ-прототип позволяет обеспечить максимально-возможный приход электроэнергии от СБ для проведения работ с энергоемкой аппаратурой.
ТГК используется как для доставки грузов на орбитальную станцию, так и для удаления грузов со станции. При этом распределение масс удаляемых грузов внутри ТГК является слабо прогнозируемым и загруженный ТГК имеет неточно известные инерционные характеристики - их фактические значения существенно отличаются от проектных или теоретически прогнозируемых расчетных оценок. Способ-прототип не позволяет учесть рассогласование между проектными и фактическими инерционными характеристиками ТГК, в том числе определить фактические инерционные характеристики ТГК после его загрузки удаляемыми с космической орбитальной станции грузами. Это приводит к использованию при управлении ориентацией ТГК его приближенных (т.е. недостоверных) инерционных характеристик. При этом неуправляемое вращательное движение ТГК в процессе закрутки, выполненной вокруг неточно заданной главной центральной оси инерции, будет иметь возмущения, которые являются нежелательным при проведении экспериментов и исследований в области микрогравитации.
Кроме того, в общем случае, в течение закрутки ТГК со временем из-за вредного влияния на ориентацию ТГК внешних моментов вращательное движение ТГК будет «разваливаться», в результате чего будет уменьшаться приход электроэнергии от СБ и ухудшатся условия для проведения экспериментов.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение управления ориентацией ТГК с неподвижными панелями СБ при проведении работ в условиях вращательного движения ТГК вокруг его главных центральных осей инерции.
Технический результат предлагаемого изобретения заключается в обеспечении необходимого энергоприхода от СБ в режиме закрутки загруженного удаляемыми с космической орбитальной станции грузами ТГК.
Технический результат достигается тем, что в способе управления ориентацией космического ТГК с неподвижными панелями СБ при проведении работ в условиях вращательного движения, включающем разворот ТГК до достижения острого угла между нормалью к рабочей поверхности СБ и направлением на Солнце и закрутку ТГК вокруг заданной оси, дополнительно производят закрутку ТГК вокруг направления нормали к рабочей поверхности СБ, направленной на Солнце, с угловой скоростью не менее 1,5 град/сек, в течение данной закрутки на интервале времени длительностью не менее одного витка измеряют компоненты угловой скорости ТГК в строительной системе координат, по измеренным значениям компонент угловой скорости ТГК определяют направления главных центральных осей инерции ТГК, определяют главную центральную ось инерции ТГК, отличную от оси минимального момента инерции и составляющую минимальный угол с нормалью к рабочей поверхности СБ, определяют угол между направлением на Солнце и плоскостью орбиты ТГК и при превышении данным углом значения 
где g - угол между вышеопределенной главной центральной осью инерции и нормалью к рабочей поверхности СБ,
I* - минимально-допустимое значение тока от СБ,
Imax - максимальный ток от СБ,
разворачивают ТГК до совмещения вышеопределенной главной центральной оси инерции с направлением, перпендикулярным к плоскости орбиты и составляющим острый угол с направлением на Солнце, и производят закрутку ТГК вокруг этой оси в направлении против орбитального вращения, в течение данной закрутки измеряют ток от СБ, при достижении измеренным значением тока от солнечных батарей минимально-допустимого значения вновь разворачивают ТГК до совмещения вышеопределенной главной центральной оси инерции с упомянутым направлением, перпендикулярным к плоскости орбиты, и вновь производят закрутку ТГК вокруг этой оси в направлении против орбитального вращения.
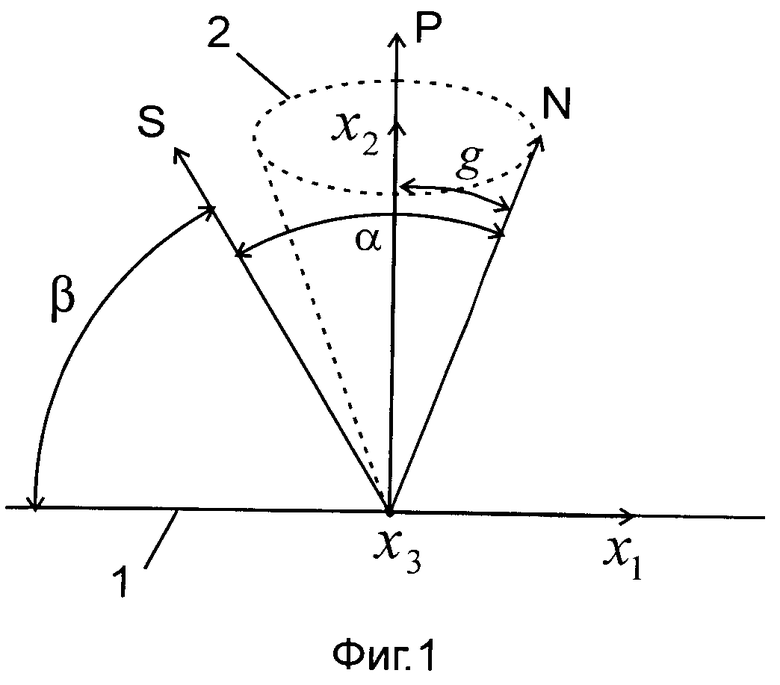
Суть предлагаемого изобретения поясняется на фиг.1, на которой представлена схема ориентации ТГК в процессе закрутки ТГК вокруг главной центральной оси инерции.
На фиг.1 введены обозначения:
1 - плоскость орбиты ТГК;
2 - область положений нормали к рабочей поверхности СБ в процессе закрутки ТГК;
N - направление нормали к рабочей поверхности СБ;
S - направление на Солнце;
P - направление, перпендикулярное к плоскости орбиты ТГК и составляющее острый угол с направлением на Солнце;
x1, x2, x3 - оси, параллельные главным центральным осями инерции ТГК;
g - угол между нормалью к рабочей поверхности СБ и главной центральной осью инерции ТГК, отличной от оси минимального момента инерции и составляющей минимальный угол с нормалью к рабочей поверхности СБ;
α - угол между нормалью к рабочей поверхности СБ и направлением на Солнце;
β - угол между направлением на Солнце и плоскостью орбиты ТГК.
Поясним предложенные в способе действия.
Рассматриваем этап автономного полета ТГК. В предлагаемом способе разворачивают ТГК до совмещения направления нормали к рабочей поверхности СБ с направлением на Солнце и производят закрутку ТГК вокруг направления нормали к рабочей поверхности СБ с угловой скоростью не менее 1,5 град/сек.
В данной ориентации обеспечивается максимальный приход электроэнергии от СБ, необходимой для зарядки аккумуляторных батарей системы электроснабжения ТГК.
В течение выполнения закрутки измеряют компоненты угловой скорости ТГК в строительной системе координат ТГК на интервале времени длительностью не менее одного витка.
По измеренным значениям компонент угловой скорости ТГК определяют текущие фактические значения компонент направлений главных центральных осей инерции ТГК в строительной системе координат.
Определение можно выполнить, например, следующим образом.
Используем следующие системы координат. Строительная система у1у2у3 жестко связана с корпусом ТГК. Считаем, например, что ось у1 параллельна продольной оси корабля и направлена от стыковочного узла к агрегатному отсеку, ось у2 направлена по нормали к рабочей поверхности СБ. Оси системы х1х2х3 параллельны главным центральным осями инерции ТГК. Положение системы х1х2х3 относительно системы у1у2у3 будем задавать углами γ, α и β, которые введем посредством следующего условия. Система у1у2у3 может быть переведена в систему х1х2х3 тремя последовательными поворотами: 1) на угол α вокруг оси у2, 2) на угол β вокруг новой оси у3, 3) на угол γ вокруг новой оси у1, совпадающей с осью х1. Матрицу перехода от системы х1х2х3 к системе у1у2у3 обозначим  , где a
ij - косинус угла между осями yi и хj. Элементы этой матрицы являются функциями введенных углов.
, где a
ij - косинус угла между осями yi и хj. Элементы этой матрицы являются функциями введенных углов.
Компоненты угловой скорости ТГК в системе х1х2х3 обозначим ωi (i=1, 2, 3). Для описания зависимости от времени величин ωi используем динамические уравнения Эйлера свободного твердого тела, на которое не действуют внешние механические моменты. Эти уравнения имеют вид



где Ji - моменты инерции ТГК относительно осей xi. Параметры µ, µ′ и углы γ, α и β для конкретной стадии полета конкретного ТГК имеют некоторые проектные прогнозируемые значения, а их фактические величины определяются из обработки данных измерений угловой скорости, полученных во время выполнения закрутки ТГК.
Решение уравнений (1), описывающее изменение величин ωi во время рассматриваемых закруток, выражается приближенными формулами ω1=λ[Asinv(t-t0)+Bcosv(t-t0)],

ω3=Acosv(t-t0)- Bsinv(t-t0),

Здесь A, В и Ω - произвольные постоянные. Формулы (2) тем точнее, чем меньше абсолютные величины отношений A/Ω, В/Ω.
Во время закрутки измеряется угловая скорость ТГК. Данные измерений имеют вид

где 


Здесь ωk могут задаваться как формулами (2), так и точным решением уравнений (1).
Обработка данных измерений (3) выполняется методом наименьших квадратов и состоит в минимизации выражения

При использовании формул (2) минимизация выполняется по восьми параметрам: А, В, Ω, λ, ν, γ, α и β, которые считаются независимыми. После того как оценки этих параметров найдены, вычисляются µ=λµ/Ω, µ′=ν/λΩ. При минимизации Ф на точных решениях уравнений (1) (это дает несколько более точные оценки) используются другие восемь параметров: ωi(t1) (i=1, 2, 3), µ, µ′, γ, α и β. Характеристики точности найденных оценок рассчитываются в рамках стандартных допущений метода наименьших квадратов.
Результатом описанной методики обработки данных измерений (3), полученных для конкретной закрутки конкретного ТГК, загруженного удаляемыми с орбитальной станции грузами и совершающего автономный полет после отстыковки от станции, являются упомянутые наборы из восьми параметров, которые определяют фактические направления главных центральных осей инерции ТГК в строительной системе координат и безразмерные комбинации его главных центральных моментов инерции.
При этом для получения приемлемой точности определения главных центральных осей инерции угловая скорость закрутки ТГК, используемой для определения главных центральных осей инерции, должна быть достаточно большой. Высокая скорость закрутки парирует вредное влияние внешних моментов, т.к. чем выше скорость закрутки, тем на большем интервале времени движение ТГК можно считать свободным и получать необходимые измерения для их последующей целевой обработки. Выполненные расчеты и численные оценки показывают, что нижнее гарантированное значение угловой скорости закрутки, выполняемой для определения главных центральных осей инерции ТГК, составляет 1,5 град/сек при длительности интервала измерений угловой скорости не менее одного витка.
Таким образом, по вышеописанному вычислительному алгоритму определяются фактические значения компонент направлений главных центральных осей инерции ТГК в строительной системе координат.
После определения фактических значений компонент направлений главных центральных осей инерции ТГК в строительной системе координат определяют главную центральную ось инерции ТГК, отличную от оси минимального момента инерции и составляющую минимальный угол с нормалью к рабочей поверхности СБ.
Определяют угол β между направлением на Солнце и плоскостью орбиты ТГК. Значение угла β в полете изменяется от нуля до его максимального значения, определяемого наклонением орбиты ТГК.
Определяем момент времени, в который выполняется условие
где g - угол между вышеопределенной главной центральной осью инерции ТГК и нормалью к рабочей поверхности СБ,
I* - минимально-допустимое значение тока от СБ,
Imax - максимальный ток от СБ (ток, вырабатываемый при ориентации нормали к рабочей поверхности СБ по направлению на Солнце).
При этом на значение I* накладывается ограничение 
В момент времени, удовлетворяющий условию (4), разворачивают ТГК до совмещения вышеопределенной главной центральной оси инерции ТГК с направлением, перпендикулярным к плоскости орбиты и составляющим острый угол с направлением на Солнце, и производят закрутку ТГК вокруг этой оси в направлении против орбитального вращения. В такой ориентации ось минимального момента инерции ТГК находится в плоскости орбиты и закрутка получается устойчивой.
Выбор направления закрутки против скорости орбитального вращения позволяет использовать меньшую скорость закрутки, что создает лучшие условия для выполнения экспериментов в области микрогравитации. Например, для ТГК типа корабля «Прогресс» скорость данной закрутки может быть выбрана около 0,2 град/сек.
В процессе данной закрутки максимальное значение угла а между нормалью к рабочей поверхности СБ и направлением на Солнце составляет 90°+g-β, при этом текущее значение тока от СБ будет составлять величину Imaxcosα. Выполнение условия (4) соответствует тому, что в процессе данной закрутки текущее измеренное значение тока от СБ будет не менее I*.
Однако, несмотря на устойчивость такой закрутки, вследствие наличия ошибок начальных условий угловых скоростей вокруг строительных осей ТГК и из-за влияния внешних моментов вращательное движение ТГК может эволюционировать, в результате чего ось минимального момента инерции будет отклоняться от плоскости орбиты.
В результате этого верхняя граница диапазона изменения угла между нормалью к рабочей поверхности СБ и направлением на Солнце увеличится, что будет приводить к уменьшению текущего прихода электроэнергии от СБ.
В течение закрутки измеряют ток от СБ и сравнивают его с минимально-допустимым значением I*. При достижении измеренным значением тока от СБ минимально-допустимого значения I* вновь разворачивают ТГК до совмещения вышеопределенной главной центральной оси инерции ТГК с упомянутым направлением, перпендикулярным к плоскости орбиты, и вновь производят закрутку ТГК вокруг этой оси.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое техническое решение обеспечивает необходимый энергоприход от СБ загруженного удаляемыми с космической орбитальной станции грузами ТГК при выполнении режима закрутки ТГК вокруг одной из фактических главных центральных осей инерции, при поддержании фактической оси минимального момента инерции в плоскости орбиты, причем фактические главные центральные оси инерции ТГК предварительно определяются по измерениям угловой скорости вращения ТГК.
Выполнение закрутки ТГК вокруг фактической главной центральной оси инерции обеспечивает отсутствие возмущений вращательного движения ТГК, что требуется для проведения экспериментов и исследований в области микрогравитации, причем полученные фактические оси инерции могут существенно отличаться от их проектных оценок.
При этом обеспечивается одновременно контроль точности закрутки и контроль обеспечения необходимого энергоприхода от СБ путем измерения в процессе закрутки тока от СБ и восстановления всех параметров закрутки в момент, когда измеренное значение тока от СБ становится меньше минимально-допустимого значения.
Достижение технического результата обеспечивается за счет построения предложенной ориентации ТГК, при которой нормаль к рабочей поверхности СБ направлена на Солнце, и выполнения предложенной закрутки ТГК вокруг направления нормали к рабочей поверхности СБ, выполнения предложенных измерений угловой скорости ТГК в предложенные моменты времени в процессе данной закрутки и определения по ним текущих фактических значений инерционных характеристик ТГК, построения в предложенный момент времени предложенной ориентации ТГК, при которой предложенным образом выбранная фактическая главная ось инерции ТГК направлена по указанному перпендикуляру к плоскости орбиты, и последующего выполнения закрутки ТГК вокруг этой оси, а также за счет предложенного измерения в процессе данной закрутки тока от СБ и восстановления всех параметров закрутки в момент, когда измеренное значение тока от СБ становится меньше минимально-допустимого значения.
В настоящее время технически все готово для реализации предложенного способа на таком ТГК как корабль «Прогресс». Для реализации разворотов, закрутки ТГК и необходимых вычислений могут использоваться штатные средства системы управления корабля «Прогресс» - штатные датчики угловой скорости (ДУС), система управления ориентации корабля «Прогресс», двигатели ориентации, бортовой вычислитель. Для измерения и отслеживания угла между плоскостью орбиты и Солнцем и угла между нормалью к поверхности СБ и направлением на Солнце могут использоваться штатные солнечные датчики и вычислительные устройства. Закрутка корабля производится на время, необходимое для проведения экспериментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539068C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ | 2014 |
|
RU2562904C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2587762C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2587663C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2020 |
|
RU2764815C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594054C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
Изобретение относится к управлению ориентацией космического, в частности транспортного грузового корабля (ТГК) с неподвижными панелями солнечных батарей (СБ). Способ включает закрутку ТГК вокруг нормали к рабочей поверхности СБ, направленной на Солнце, с угловой скоростью не менее 1,5 град/сек. При этом на интервале времени не менее одного витка измеряют компоненты угловой скорости ТГК в строительной системе координат. По измеренным значениям определяют направления главных центральных осей инерции ТГК. Среди этих осей находят ось, отличную от оси минимального момента инерции и составляющую минимальный угол с нормалью к рабочей поверхности СБ. Определяют угол между направлением на Солнце и плоскостью орбиты ТГК. Если данный угол превышает некоторое значение, зависящее от указанного минимального угла, а также - минимального и максимального токов СБ, производят разворот ТГК. При этом совмещают указанную найденную ось инерции с направлением, перпендикулярным к плоскости орбиты и составляющим острый угол с направлением на Солнце. Производят закрутку ТГК вокруг этой оси в направлении против орбитального вращения. В течение закрутки измеряют ток от СБ. При достижении током минимального значения вновь разворачивают ТГК до совмещения указанной найденной оси инерции ТГК с указанным перпендикулярным направлением и вновь производят указанную закрутку ТГК. Технический результат изобретения состоит в обеспечении необходимой энергоотдачи СБ в режиме закрутки ТГК вокруг одной из его фактических главных центральных осей инерции при поддержании оси минимального момента инерции в плоскости орбиты. 1 ил.
Способ управления ориентацией космического транспортного грузового корабля с неподвижными панелями солнечных батарей при проведении работ в условиях вращательного движения, включающий разворот корабля до достижения острого угла между нормалью к рабочей поверхности солнечных батарей и направлением на Солнце и закрутку корабля вокруг заданной оси, отличающийся тем, что производят закрутку транспортного грузового корабля вокруг направления нормали к рабочей поверхности солнечных батарей, направленной на Солнце, с угловой скоростью не менее 1,5 град/сек, в течение данной закрутки на интервале времени длительностью не менее одного витка измеряют компоненты угловой скорости транспортного грузового корабля в строительной системе координат, по измеренным значениям компонент угловой скорости транспортного грузового корабля определяют направления главных центральных осей инерции транспортного грузового корабля, определяют главную центральную ось инерции транспортного грузового корабля, отличную от оси минимального момента инерции и составляющую минимальный угол с нормалью к рабочей поверхности солнечных батарей, определяют угол между направлением на Солнце и плоскостью орбиты транспортного грузового корабля и при превышении данным углом значения
,
где g - угол между указанной определенной главной центральной осью инерции и нормалью к рабочей поверхности солнечных батарей,
I* - минимально допустимое значение тока от солнечных батарей,
Imax - максимальный ток от солнечных батарей,
разворачивают транспортный грузовой корабль до совмещения указанной определенной главной центральной оси инерции с направлением, перпендикулярным к плоскости орбиты и составляющим острый угол с направлением на Солнце, и производят закрутку транспортного грузового корабля вокруг этой оси в направлении против орбитального вращения, в течение данной закрутки измеряют ток от солнечных батарей, при достижении измеренным значением тока от солнечных батарей минимально-допустимого значения вновь разворачивают транспортный грузовой корабль до совмещения указанной определенной главной центральной оси инерции с упомянутым направлением, перпендикулярным к плоскости орбиты, и вновь производят закрутку транспортного грузового корабля вокруг этой оси в направлении против орбитального вращения.
| US 3412955 А, 26.11.1968; | |||
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2010 |
|
RU2457159C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325312C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ С СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2004 |
|
RU2279376C2 |
| РАЗВЕРТЫВАЕМАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО ОБЪЕКТА | 1982 |
|
SU1086680A1 |
| US 6068218 A1, 30.05.2000 | |||
| Способ плазмохимической обработки жидкого сырья органического и/или растительного происхождения и устройство для его реализации | 2017 |
|
RU2665418C1 |

