Изобретение относится к космической технике и может быть использовано для ориентации космического аппарата (КА) при выполнении экспериментов и исследований.
Известен способ управления ориентацией КА, включающий выставку осей аппарата и поддержание углового положения с помощью двигателей ориентации [1].
Однако для использования данного способа необходимо расходовать рабочее тело, что приводит, кроме того, к загрязнению оптических поверхностей КА и вызывает микроускорения на борту КА.
Наиболее близким к предлагаемому, прототипом, является способ, включающий выставку оси КА, соответствующую минимальному моменту инерции, на центр Земли и орбитальное смещение аппарата [2]. Данный способ используется для КА, имеющих вытянутую форму, т.е. когда момент инерции относительно продольной оси значительно (в 7 и более раз) меньше момента инерции относительно поперечных осей.
В этом случае обеспечивается гравитационная ориентация КА вытянутой формы, которая не требует для поддержания расхода рабочего тела и, следовательно, при этом не загрязняются оптические поверхности КА и не вызывают ускорения из-за работы двигателей управления ориентацией.
Однако при нахождении Солнца вблизи плоскости орбиты КА в этом случае не получает электрическую энергию. Это связано с тем, что при трехосной гравитационной ориентации продольная ось ОХ КА ориентируется на центр Земли, ось ОУ, соответствующая максимальному моменту инерции, ориентируется перпендикулярно плоскости орбиты, а ось OZ, по которой размещены неподвижные панели солнечных батарей (СБ), оказывается в плоскости орбиты. Для одноосной гравитационной ориентации КА с неподвижными каналами СБ также в общем случае не обеспечивается достаточный приход электроэнергии [2] - [4].
Техническим результатом предлагаемого способа является обеспечение энергоприхода при управлении ориентацией КА с неподвижными панелями СБ в процессе выполнения экспериментов на орбитах с максимальной длительностью теневого участка.
Технический результат достигается чем, что в предлагаемом способе одноосной ориентации КА, основанном на выставке продольной оси космического аппарата на центр Земли, орбитальном смещении аппарата и закрутке вокруг продольной оси, при нахождении Солнца вблизи плоскости орбиты совмещают плоскость солнечных батарей с плоскостью орбиты к моменту прохождения утреннего терминатора, измеряют и отслеживают угол между перпендикуляром к активной поверхности солнечных батарей и направлением на Солнце, закрутку космического аппарата вокруг продольной оси в направлении, соответствующем уменьшению измеряемого и отслеживаемого угла между перпендикуляром к активной поверхности солнечных батарей и направлением на Солнце, осуществляют в момент прохождения утреннего терминатора с угловой скоростью в диапазоне ω=360°/T - 720°/T, где Т - период обращения космического аппарата на орбите, в секундах. За счет выполнения предлагаемых действий КА в момент прохождения утреннего терминатора начнет получать электрическую энергию, т.к. при этом активные панели СБ начнут поворачиваться на Солнце. Освещение активных панелей СБ будет увеличиваться и при ω=360°/Т закончится при прохождении КА вечернего терминатора. Далее электропитание систем КА будет осуществляться в соответствии с принятой схемой электроснабжения от аккумуляторных батарей, подзаряд которых выполняется при освещении панелей СБ Солнцем. Заметим также, что закрутка КА вокруг продольной оси с угловой скоростью из интервала ω=360°/Тсек -720°/Тсек не приведет к нарушению одноосной гравитационной ориентации КА, т.к. моменты инерции КА вокруг поперечных осей значительно (~ в 7 и более раз) превышают величину момента инерции вокруг продольной оси КА. При выборе угловой скорости из предлагаемого интервала приход электрической энергии будет несколько отличаться от оптимального значения, получаемого при ω=360°/Т, однако положительный эффект в предлагаемом способе будет по-прежнему.
Запишем уравнения вращательного движения КА.
КА считается твердым телом, геоцентрическое движение его центра масс - кеплеровым эллиптическим. Элементы этого движения находятся по данным радиоконтроля орбиты. Для записи уравнений введем две правые декартовы системы координат - орбитальную ОХ1Х2Х3Х и образованную главными центральными осями инерции КА Ох1х2х3. Точка О - центр масс КА, оси ОХ3 и ОХ1 направлены соответственно вдоль геоцентрического радиуса - вектора точки О и по трансверсали к орбите в этой точке. Упрощая модель, полагаем, что ось Ох1 направлена вдоль продольной оси КА в сторону агрегатного отсека, ось Ох2 перпендикулярна плоскости солнечных батарей, светочувствительная сторона которых обращена к полупространству х2>0.
Положение системы Ох1х2х3 относительно системы OX1X2X3 будем задавать углами γ, δ и β, которые введем следующим образом. Система ОХ1Х2Х3 может быть переведена в систему Ox1x2x3 тремя последовательными поворотами: 1) на угол δ+π/2 вокруг оси ОХ2, 2) на угол β вокруг новой оси ОХ3, 3) на угол γ вокруг новой оси ОХ1, совпадающей с осью Ох1. Матрицу перехода от системы Ох1х2х3 к системе ОХ1Х2Х3 обозначим ||αi||3 i=1, где αi - косинус угла между осями ОХi и Охj. Элементы этой матрицы выражаются через введенные углы с помощью формул
В уравнениях вращательного движения КА учитываются гравитационный и восстанавливающий аэродинамический моменты. Эти уравнения имеют вид



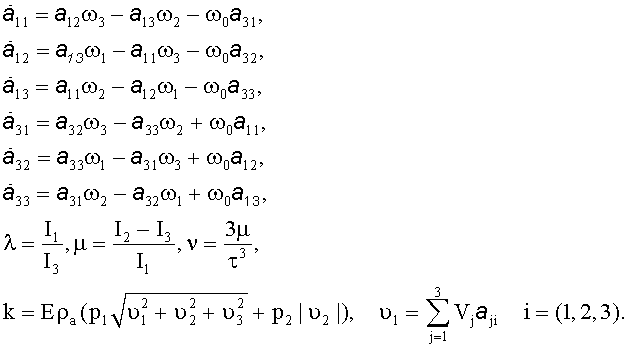
Здесь точка означает дифференцирование по времени t, ωi (i=1, 2, 3) - компоненты абсолютной угловой скорости КА в системе Ох1х2х3, параметры р1 характеризуют действующий на КА аэродинамический момент, ω0 - модуль абсолютной угловой скорости орбитальной системы координат, Ii - моменты инерции КА относительно осей Охi; µ - гравитационный параметр Земли, τ - геоцентрическое расстояние точки О, ρα- плотность атмосферы в этой точке, V1 - компоненты скорости точки О относительно поверхности Земли в орбитальной системе координат, Е - масштабирующий множитель.
Полученные уравнения (1) позволяют оценить вращательные движения КА при различных начальных условиях и иллюстрируют сформулированные понятия и положения.
В настоящее время технически все готово для реализации предложенного способа на грузовом корабле «Прогресс» при проведении экспериментов с гравитационно-чувствительной аппаратурой. Для выставки продольной оси КА, соответствующей минимальному моменту инерции, на центр Земли и орбитального смещения аппарата, могут использоваться штатные средства системы управления корабля «Прогресс» - штатные датчики угловой скорости (ДУС), система управления ориентацией корабля «Прогресс», двигатели ориентации. Для совмещения плоскости СБ с плоскостью орбиты и для закрутки КА вокруг выставленной на центр Земли оси аппарата с угловой скоростью ω=360°/T-720°/Т, где Т - период обращения космического аппарата на орбите, могут использоваться штатные средства системы управления ориентацией корабля «Прогресс». Для измерения и отслеживания угла между плоскостью орбиты и Солнцем и угла между перпендикуляром к активной поверхности СБ и направлением на Солнце могут использоваться штатные солнечные датчики и вычислительные устройства. Закрутка аппарата производится на время, необходимое для проведения экспериментов, и может достигать нескольких десятков витков.
Предлагаемый способ позволяет использовать космические аппараты с неподвижными панелями солнечных батарей при выполнении экспериментов на орбитах с максимальной длительностью теневого участка и обеспечивать при этом приход электрической энергии на КА за счет освещения панелей СБ солнечным светом.
Список литературы
1. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - М.: Машиностроение, 1974.
2. Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. - М.: Машиностроение, 1984.
3. Белецкий В.В. Движение искусственного спутника относительно центра масс. - М.: Наука, 1965.
4. Черноусько Ф.Л. Об устойчивости регулярной прецессии спутника. Прикладная математика и механика, 1963, т.28, вып.1, с.155-157.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2010 |
|
RU2457159C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ | 2014 |
|
RU2562904C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594054C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539271C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539068C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594056C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2020 |
|
RU2764815C1 |
Изобретение относится к управлению ориентацией космического аппарата (КА) с неподвижными относительно корпуса КА панелями солнечных батарей (СБ). Способ управления включает гравитационную ориентацию КА и его закрутку вокруг продольной оси (минимального момента инерции). При нахождении Солнца вблизи плоскости орбиты совмещают эту плоскость с плоскостью СБ к моменту прохождения утреннего терминатора. Измеряют и отслеживают угол между перпендикуляром к активной поверхности СБ и направлением на Солнце. В момент прохождения утреннего терминатора осуществляют закрутку КА в направлении, соответствующем уменьшению указанного угла, причем угловую скорость закрутки выбирают из диапазона 360°/Т - 720°/Т, где Т - период обращения КА по орбите. Техническим результатом изобретения является обеспечение достаточного поступления энергии СБ на орбитах с максимальной длительностью теневого участка.
Способ управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов на орбитах с максимальной длительностью теневого участка, включающий гравитационную ориентацию космического аппарата и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, отличающийся тем, что при нахождении Солнца вблизи плоскости орбиты совмещают плоскость солнечных батарей с плоскостью орбиты к моменту прохождения утреннего терминатора, измеряют и отслеживают угол между перпендикуляром к активной поверхности солнечных батарей и направлением на Солнце, а закрутку космического аппарата вокруг продольной оси в направлении, соответствующем уменьшению измеряемого и отслеживаемого угла между перпендикуляром к активной поверхности солнечных батарей и направлением на Солнце, осуществляют в момент прохождения утреннего терминатора с угловой скоростью из диапазона ω=360°/Т - 720°/Т, где Т - период обращения космического аппарата по орбите в секундах.
| US 5669586 А, 23.09.1997 | |||
| СПОСОБ ТРЕХОСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1995 |
|
RU2128607C1 |
| ИСКУССТВЕННЫЙ СПУТНИК | 1992 |
|
RU2087387C1 |
| US 3210026 A, 05.10.1965. | |||

