Изобретение относится к управлению полетом космических аппаратов (КА), включающему одновременное управление его угловым движением с помощью силовых гироскопов (СГ) и бортовым энергообеспечением.
Известен способ управления полетом астрофизического КА при зондировании космического пространства с целью поиска для исследования источников (И) «Гамма» излучения (см. Ковтун B.C., Митрикас В.В., Платонов В.Н., Ревнивых С.Г., Суханов Н.А. Математическое обеспечение проведения экспериментов при управлении ориентацией космического астрофизического модуля «Гамма» // Техническая кибернетика. 1990. №3. С. 144-157 [1]), включающий одновременное управление угловым движением КА с помощью двухстепенных СГ (гиродинов) и энергообеспечением бортовых систем аппарата и целевой нагрузки.
Суть способа заключается в построении и поддержании режима инерциальной ориентации (ИО) КА на И в течение заданного промежутка времени. При этом производится измерение векторов абсолютной угловой скорости КА  и накопленного кинетического момента
и накопленного кинетического момента  в системе СГ. Определяются по измеренным векторам
в системе СГ. Определяются по измеренным векторам  и
и  значения суммарного вектора кинетического момента
значения суммарного вектора кинетического момента  . Определяются для каждого И «q»-е контрольные значения суммарного вектора кинетического момента
. Определяются для каждого И «q»-е контрольные значения суммарного вектора кинетического момента  , характеризующие предстоящий сеанс ИО по прогнозируемым значениям указанного вектора, приведенным к нулевым начальным условиям. Проверяются выполнения для каждого «q»-го значения
, характеризующие предстоящий сеанс ИО по прогнозируемым значениям указанного вектора, приведенным к нулевым начальным условиям. Проверяются выполнения для каждого «q»-го значения  условия безрасходного управления КА:
условия безрасходного управления КА:
 ,
,
где  - определенное по измеренным векторам
- определенное по измеренным векторам  и
и  значение вектора
значение вектора
 на момент времени t0 начала проверки (поддержания ИО), S - область располагаемых значений вектора кинетического момента системы СГ. Кроме этого, производят измерение текущего уровня заряженности аккумуляторных батарей (АБ) ЕИ и проверку выполнения условия необходимо достаточного уровня заряда АБ для проведения наблюдения одного И
на момент времени t0 начала проверки (поддержания ИО), S - область располагаемых значений вектора кинетического момента системы СГ. Кроме этого, производят измерение текущего уровня заряженности аккумуляторных батарей (АБ) ЕИ и проверку выполнения условия необходимо достаточного уровня заряда АБ для проведения наблюдения одного И
СЕ2>ЕИ>СЕ1,
где СЕ1и СЕ2 - нижний допустимый уровень запаса электроэнергии в АБ и уровень, обеспечивающий проведение одного режима ИО с одновременно работающими бортовыми системами и целевой нагрузкой. Далее, в случае невыполнения условия безрасходного управления КА и/или невыполнения условия необходимо достаточного уровня заряженности АБ, превышающего значение СЕ2, проводится режим гравитационной разгрузки системы СГ от накопленного кинетического момента с одновременным проведением режима заряда АБ от солнечных батарей (СБ). При этом продолжительность указанных режимов длится до выполнения одновременно условия необходимо достаточного уровня заряженности аккумуляторов для проведения наблюдения одного И
Еи≥СЕ2
и условия безрасходного управления на момент времени t0.
После проведения режима ИО производят повторную гравитационную разгрузку СГ от накопленного кинетического момента с одновременным зарядом АБ, повторяя, таким образом, выполнение программы полета КА на каждом витке. При проведении наблюдения выбранного И режим ориентации СБ на Солнце, которые сами могут вращаться относительно одной из главных центральных осей аппарата, не обеспечивается тем положением, которое КА занимает в инерциальном пространстве.
На протяжении всего полета КА производится контроль заряженности АБ по нижнему предельно допустимому уровню СЕ1 и при его достижении
ЕИ=СЕ1,
на борту КА отключается целевая нагрузка, остаются включенными минимально необходимое число бортовых систем для поддержания работоспособности КА и обеспечивается режим ориентации СБ на Солнце.
Недостаток указанного способа управления КА заключается в том, что его невозможно использовать для управления КА, предназначенных для дистанционного зондирования Земли (ДЗЗ). Прежде всего связано это с тем, что на КА ДЗЗ СБ, как правило, устанавливаются неподвижно. В противном случае, относительное движение СБ создает дополнительные вибрации на корпусе КА, которые передаются целевой аппаратуре. В частности, при использовании оптико-электронного модуля (ОЭМ) на борту КА ДЗЗ указанные вибрации приводят к размытости снимков земной поверхности.
Неподвижная установка СБ на КА ДЗЗ исключает возможность проведения эффективной гравитационной разгрузки СГ от накопленного кинетического момента с одновременной ориентацией батарей на Солнце. Поэтому на КА ДЗЗ применяются другие способы разгрузки СГ без расхода топлива реактивных двигателей с использованием внешних сил и моментов, действующих на аппарат.
В качестве прототипа рассматривается способ управления полетом КА ДЗЗ с использованием системы СГ для управления угловым движением аппарата и применением электромагнитных исполнительных органов (ЭМИО) для разгрузки от накопленного кинетического момента (см. Богачев А.В., Платонов В.Н., Тимаков С.Н. Анализ возможности обеспечения точностных характеристик стабилизации перспективного космического аппарата, предназначенного для дистанционного зондирования Земли // Космонавтика и ракетостроение. 2013. №2. С. 83-89 [2]).
Способ включает построение инерциальной солнечной ориентации (ИСО) КА с использованием системы силовых гироскопов, измерение вектора кинетического момента в каждом из исполнительных органов, поддержание указанной ориентации с одновременной разгрузкой силовых гироскопов при помощи ЭМИО до получения значений модулей кинетического момента, лежащих в пределах между нижним и верхним допустимыми значениями кинетического момента исполнительных органов

где  - модуль кинетического момента i-го силового гироскопа
- модуль кинетического момента i-го силового гироскопа
системы, H1i, H2i - соответственно верхние и нижние предельно допустимые значения модуля кинетического момента каждого i-го исполнительного органа перед проведением съемки поверхности Земли.
При этом в качестве силовых гироскопов используются двигатели - маховики. Ограничения по верхним предельным значениям связаны с наличием вибраций в ОЭМ, создаваемых работающими маховиками в определенном частотном диапазоне вращения ротора, когда частота угловой скорости вращения совпадает с частотой упругих деформаций на посадочном месте модуля. Частотные колебания вызваны, в основном, имеющимися статическим и динамическим дебалансами роторов маховиков инерционных элементов, имеющихся также в двухстепенных (гиродинах) и трехстепенных СГ. Кроме того, резонансные частотные явления зависят от собственных колебаний корпуса КА и целевой аппаратуры (ЦА), которые определяются жесткостью самого корпуса, а также жесткостью мест крепления ЦА в корпусе. Поэтому аналогичные ограничения повсеместны при отсутствии специальных дополнительных демпфирующих устройств, установленных в местах крепления СГ, и имеют конкретно выраженные значения для рассматриваемых конструкций КА. В частности, для КА ДЗЗ с указанной описанной системой СГ, состоящей из восьми маховиков (i=1, 2, …, 8), ограничения H1i=4 Нмс.
Ограничения по нижнему допустимому значению H2i связаны с возможностью, в процессе съемки, смены знака скорости вращения двигателя - маховика. При этом возникают возмущения по угловой скорости КА, которые нарушают условия проведения съемки.
В рассматриваемом примере H2i=2 Нмс.
Далее определяются моменты времени t0 начала и tk завершения съемки поверхности Земли. Для проведения съемки производят разворот космического аппарата из инерциальной солнечной ориентации в орбитальную ориентацию к моменту времени t0. Связано это с тем, что продольная ось КА ДЗЗ, совпадающая с продольной осью ОЭМ, направлена при проведении съемки подспутниковой точки в надир. Далее производят поддержание орбитальной ориентации для проведения съемки поверхности Земли до момента времени завершения съемки.
Кроме того, как правило, современные КА ДЗЗ производят и другие виды съемки, требующие отклонения от вертикали, в частности стереосъемку участков земной поверхности. Для этого в орбитальной системе координат (ОСК) производятся последовательно развороты КА продольные (по тангажу) и поперечные (по крену) относительно его трасы полета до момента времени tk завершения съемки поверхности Земли. При этом полная ориентация СБ на Солнце не обеспечивается.
По завершении съемки с момента времени tk производится разворот КА из ОСК в ИСО. Далее после разворота производят поддержание ИСО с разгрузкой СГ от накопленного кинетического момента с использованием ЭМИО до начала теневого участка орбиты. При этом на теневом участке орбиты указанную разгрузку не производят.
Основной недостаток рассмотренного способа-прототипа заключается в том, что в процессе управления полетом КА ДЗЗ не учитывается резервное время его энергообеспечения от вторичных источников питания с учетом выполнения динамических операций, текущего энергопотребления аппарата (включая затраты электроэнергии в ЭМИО), прохождения аппаратом теневых участков рабочей орбиты. Указанный недостаток может существенно повлиять на живучесть КА. В случаях потери ИСО резервное время по энергообеспечению определяет время существования аппарата на орбите. При этом за резервное время по энергообеспечению КА принимается интервал полетного времени, в течение которого разрядная энергоемкость вторичного источника питания АБ обеспечивает штатную работу бортовых систем в пределах температурных условий эксплуатации КА.
Техническим результатом изобретения является повышение ресурса КА ДЗЗ в плане его энергообеспечения при выполнении программы полета по съемке поверхности Земли.
Для достижения технического результата в способе управления космическим аппаратом дистанционного зондирования Земли, включающем построение инерциальной солнечной ориентации космического аппарата с использованием системы силовых гироскопов, измерение вектора кинетического момента в каждом из исполнительных органов, поддержание указанной ориентации с одновременной разгрузкой силовых гироскопов при помощи электромагнитных исполнительных органов до получения значений модулей кинетического момента, лежащих в пределах между нижним и верхним допустимыми значениями кинетического момента исполнительных органов, определение моментов времени начала и завершения съемки поверхности Земли, разворот космического аппарата из инерциальной солнечной ориентации в орбитальную ориентацию к моменту времени начала съемки поверхности Земли, поддержание орбитальной ориентации для проведения съемки поверхности Земли до момента времени завершения съемки, разворот космического аппарата из орбитальной ориентации в инерциальную солнечную ориентацию с проведением повторного цикла ее поддержания и одновременной указанной разгрузкой силовых гироскопов от накопленного кинетического момента до начала теневого участка орбиты, в отличие от известного измеряют на текущем витке, перед началом указанных динамических режимов, уровень заряженности аккумуляторных батарей, с учетом которого определяют текущий энергобаланс космического аппарата на интервале предстоящего динамического режима, сравнивают указанные текущие значения с нижними предельно допустимыми уровнями заряженности аккумуляторных батарей для каждого режима, и если текущие значения превышают предельно допустимые значения, проводят динамические режимы, а если не превышают, проводят закрутку космического аппарата при ориентации солнечных батарей на Солнце, при этом закрутку проводят также и перед началом теневого участка орбиты, в процессе закрутки производят заряд аккумуляторных батарей на световой части орбиты с прекращением разгрузки силовых гироскопов от накопленного кинетического момента, а после окончания теневого участка орбиты, а также перед началом проведения динамических режимов на последующих витках производят повторные указанные проверки до завершения процесса запланированной съемки поверхности Земли, далее на витках с незапланированной съемкой проводят разгрузки силовых гироскопов и закрутки космического аппарата с измерением текущего уровня заряженности аккумуляторных батарей, при этом в процессе разгрузки силовых гироскопов проверяют, превышает ли текущий уровень заряженности значение нижнего допустимого уровня заряженности аккумуляторных батарей, и если превышает, продолжают режим разгрузки силовых гироскопов до получения значений модулей кинетического момента исполнительных органов, лежащих в пределах между нижним и верхним допустимыми значениями, а если не превышает - проводят закрутку космического аппарата с прекращением разгрузки силовых гироскопов от накопленного кинетического момента, в процессе закрутки космического аппарата и заряда аккумуляторных батарей сравнивают измеренные значения с верхним предельным уровнем заряженности аккумуляторных батарей, необходимым для проведение режима разгрузки силовых гироскопов, и в случае превышения измеренными значениями верхнего предельного уровня заряженности и ненахождения модулей указанных векторов исполнительных органов в пределах между нижним и верхним допустимыми значениями кинетического момента повторно проводят режим разгрузки силовых гироскопов, далее чередуют проведение режимов закрутки космического аппарата с режимами разгрузки силовых гироскопов от накопленного кинетического момента с учетом заряженности аккумуляторов в пределах допустимых уровней и нахождения кинетического момента силовых гироскопов в допустимых пределах разгрузки, до перехода в режим орбитальной ориентации для очередной съемки поверхности Земли.
Для пояснения сути предложенного технического решения представлены:
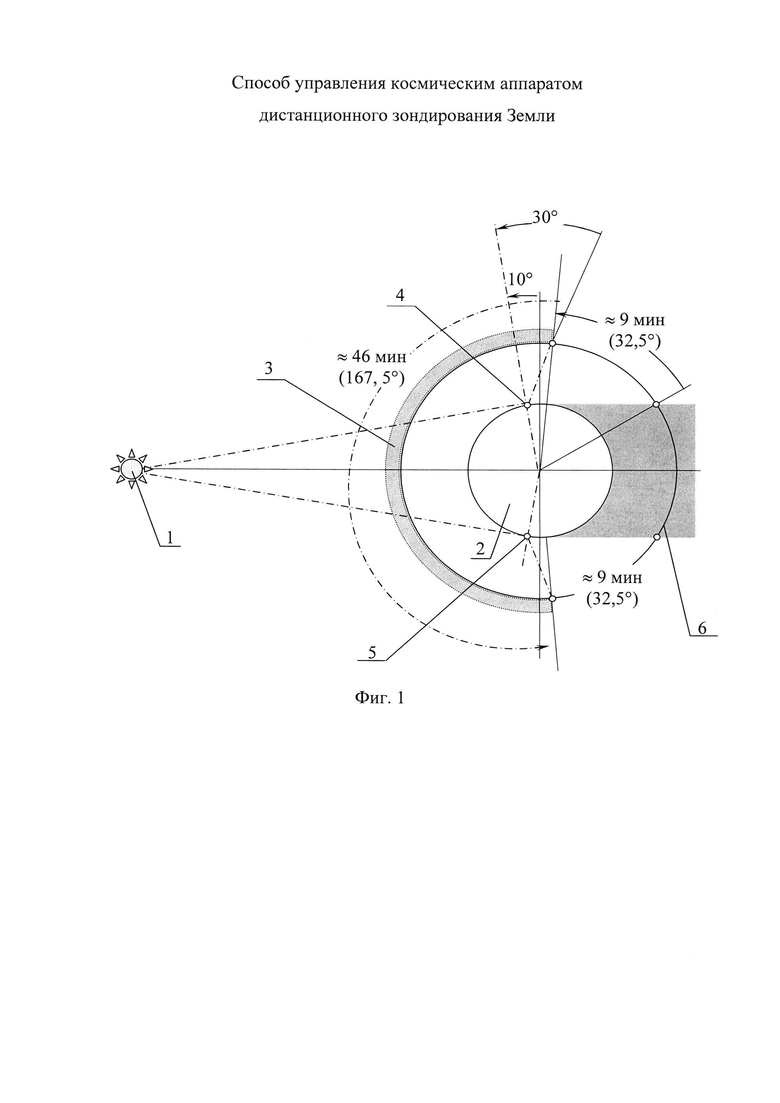
Фиг. 1 - схема наблюдения Земли с КА ДЗЗ;
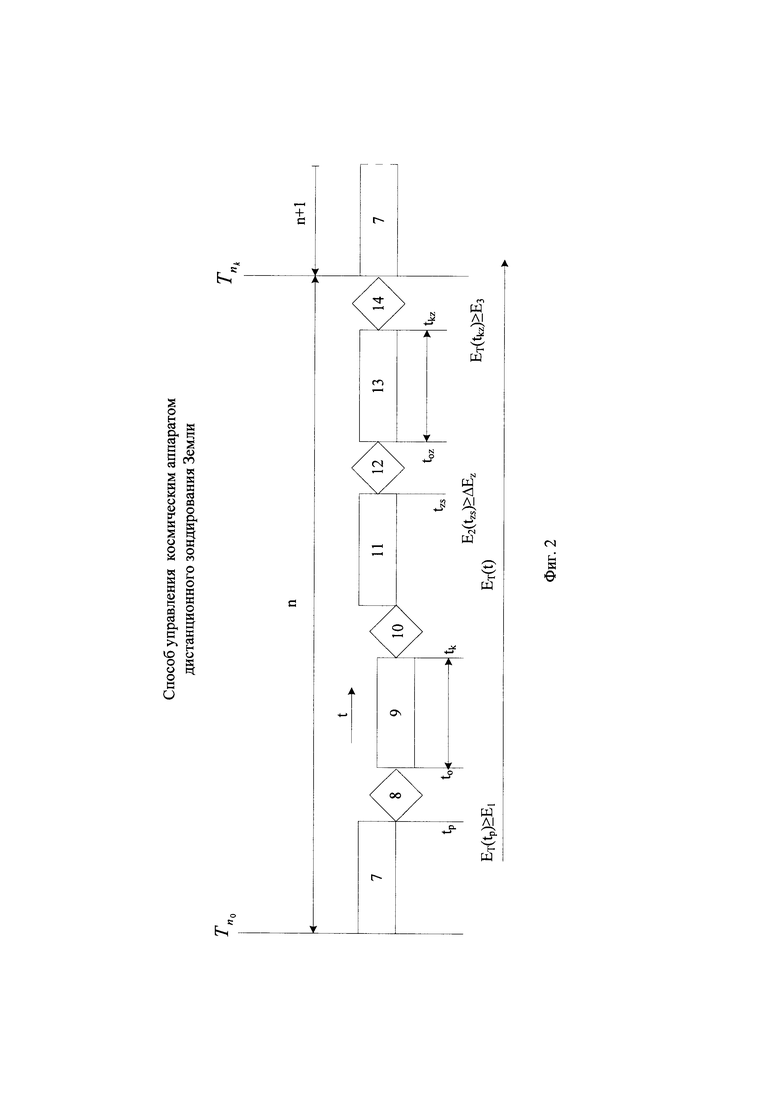
Фиг. 2 - циклограмма динамических режимов управления полетом КА;
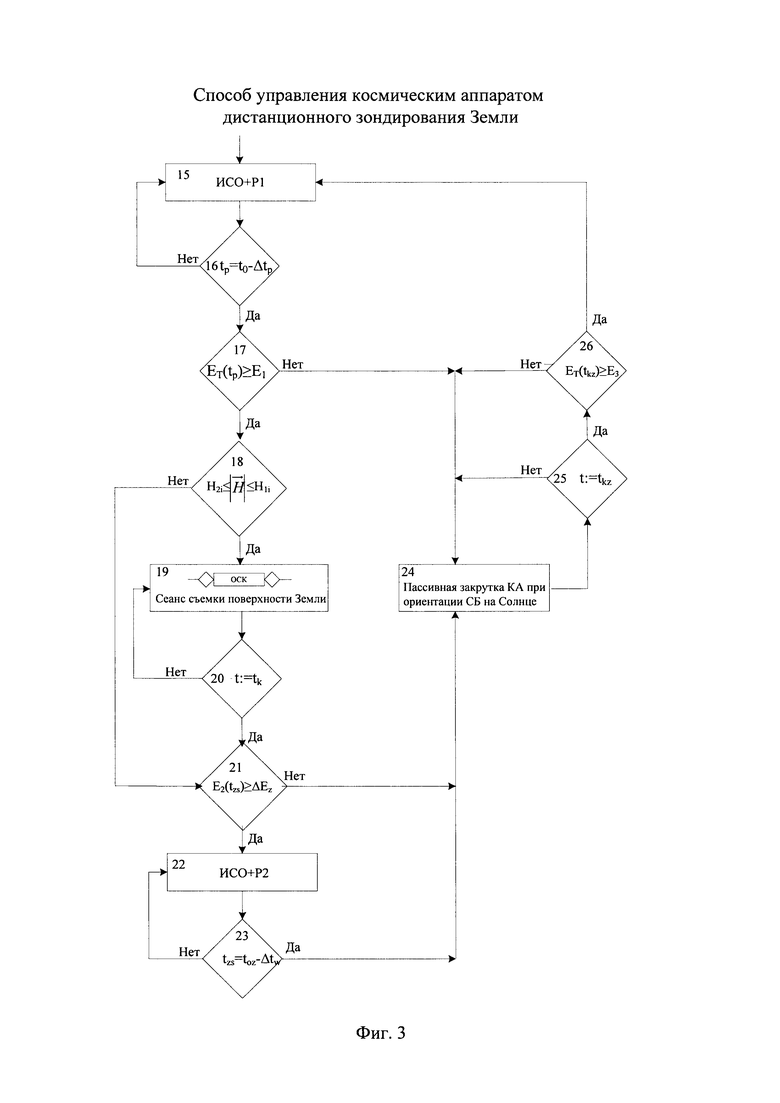
Фиг. 3 - блок-схема алгоритма управления полетом КА ДЗЗ при проведении съемки поверхности Земли;
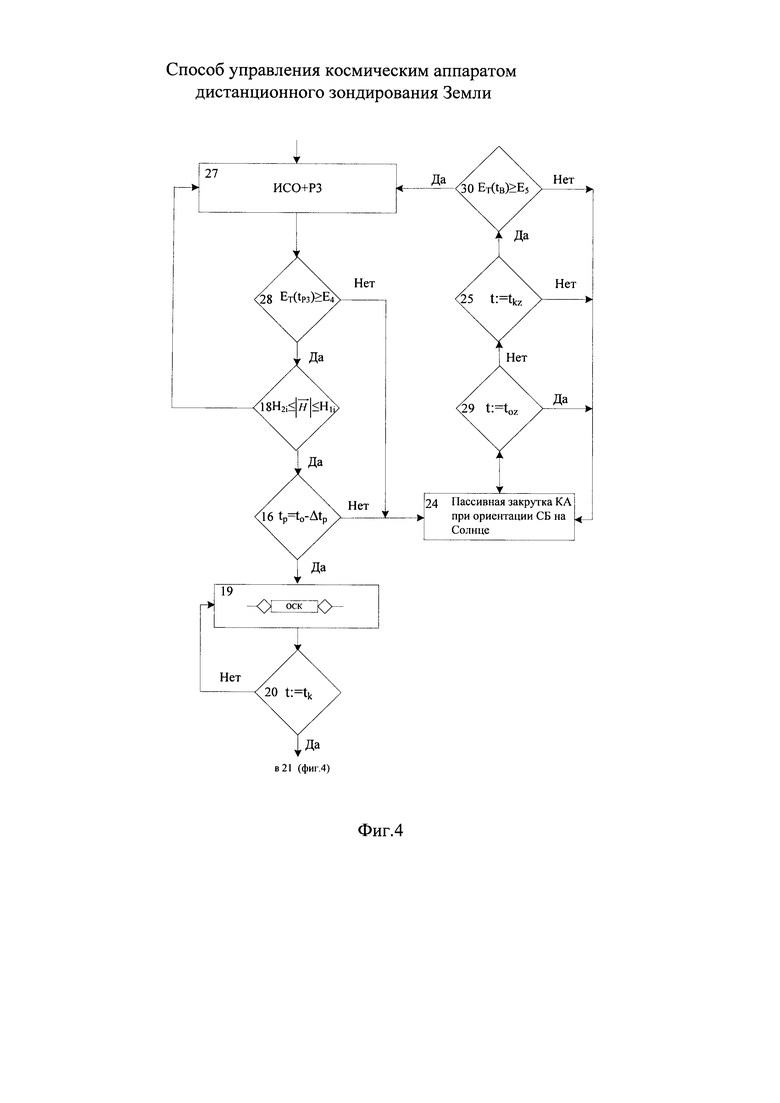
Фиг. 4 - блок-схема алгоритма управления полетом КА ДЗЗ без съемки поверхности Земли;
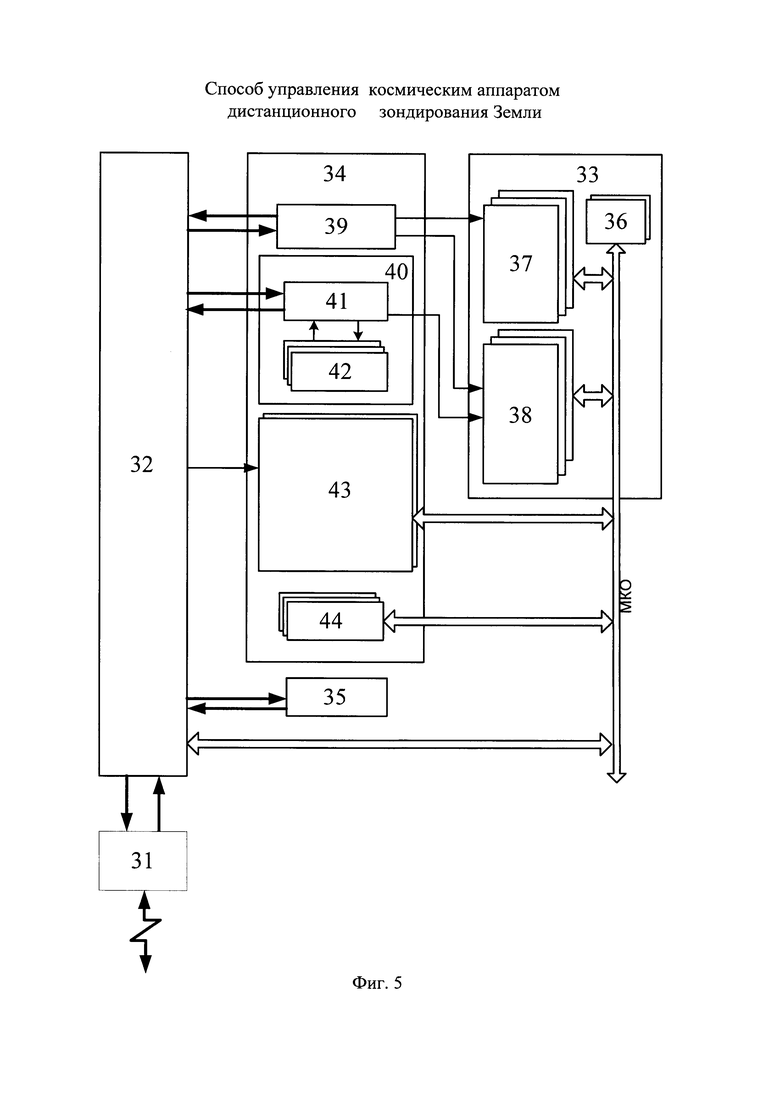
Фиг. 5 - блок-схема системы, реализующей способ управления КА ДЗЗ.
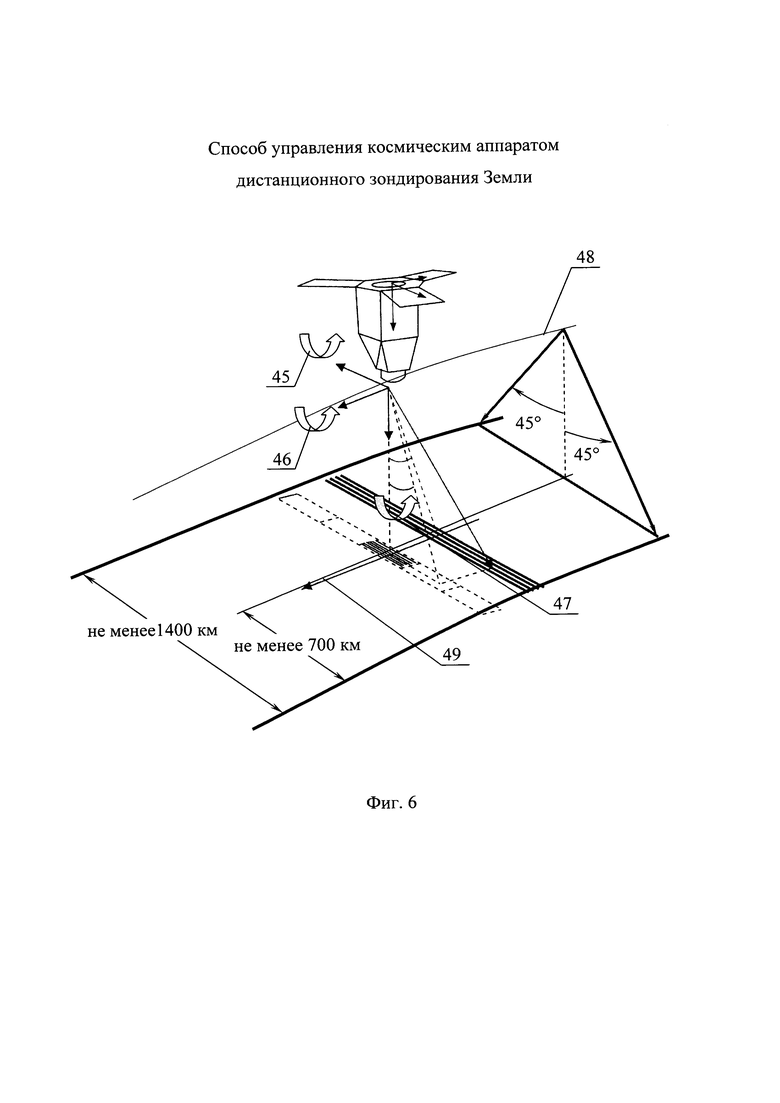
Фиг. 6 - схема проведения съемки поверхности Земли.
Рассмотрим схему наблюдения Земли с КА ДЗЗ в освещенных условиях при углах возвышения Солнца над местным горизонтом от 10° до 90° в течение наблюдений, см. фиг. 1, где введены обозначения:
1 - Солнце;
2 - Земля;
3 - рабочий участок орбиты КА ДЗЗ с возможными зонами проведения съемки;
4 - первый наблюдаемый участок поверхности;
5 - последний наблюдаемый участок поверхности;
6 - теневой интервал орбиты КА ДЗЗ.
На фиг. 1 показана также точка отсчета допустимого угла возвышения Солнца над местным горизонтом. При этом начало съемки до начала выполнения условия освещенности района съемки обеспечивается за счет разворота КА по углу тангажа на 30°.
Пример рассмотрен для круговой наклонной орбиты с высотой 720 км, наклонением ≈51,6°, периодом ≈99,2 мин. При этом длительность теневого интервала орбиты находится в пределах от 0 до 35 мин.
Циклограмма динамических режимов управления полетом КА на n-м рабочем витке представлена на фиг. 3, где введены обозначения: 7 - ИСО+Р1 разгрузка с использованием ЭМИО; 8 - разворот КА из ИСО в ОСК; 9 - ОСК+программные развороты; 10 - разворот КА из ОСК в ИСО; 11 - ИСО+Р2 разгрузка с использованием ЭМИО; 12 - закрутка КА при ориентации СБ на Солнце; 13 - полет КА на теневом участке орбиты в пассивной закрутке; 14 - гашение остаточной угловой скорости. При этом режимы разгрузки Р1 и Р2 в ИСО на каждом витке будут разными и отличаться между собой выбором состава ЭМИО (в рассмотренном прототипе их три), так как начальные условия по вектору кинетического момента перед разгрузкой СГ разнятся между собой. Кроме этого, введены обозначения:
tp - момент времени начала разворота из ИСО в ОСК;
t0 - момент времени начала съемки поверхности Земли;
tk - момент времени завершения съемки поверхности Земли;
tzs - момент времени начала проведения пассивной закрутки КА на Солнце;
t0z - момент времени начала теневого участка Земли;
tkz - момент времени завершения теневого участка Земли;
ET(t)- текущий уровень заряженности АБ;
ET(tp)≥Е1 - проверка выполнимости режима съемки по энергообеспечению;
E2(tZS)≥ΔEz - проверка выполнимости по энергообеспечению работы бортовых систем КА в условиях режима пассивной закрутки на теневом участке орбиты;
ET(tkz)≥Е3 - проверка выполнимости по энергообеспечению режима ИСО+Р1 после теневого участка орбиты.
На фиг. 2 обозначены также моменты времени Tn0, Tnk - начала и окончания n-го и (n+1)-го рабочих витков.
На фиг. 3 представлена блок-схема алгоритма управления полетом КА ДЗЗ, которое осуществляется с использованием бортового комплекса управления (БКУ) (см. [3]) при проведении съемки поверхности Земли.
На фиг. 4 представлена блок-схема алгоритма управления полетом КА ДЗЗ, которое осуществляется с использованием БКУ на витках с незапланированной съемкой.
На n-м витке поведения съемки, оператор 15 обеспечивает выполнение режима ИСО+Р1 (см. фиг. 3), при этом оператор 16 производит контроль продолжительности указанного режима до момента времени начала разворота tp=t0-Δtp, где Δtp - продолжительность разворота из ИСО в ОСК.
В момент времени начала разворота tp проверяются условия выполнимости режима съемки:
- по энергообеспечению в операторе 17
где Е1 - значение, определяющее необходимо достаточный уровень заряженности аккумуляторных батарей для обеспечения проведения съемки поверхности Земли с учетом резервного времени по энергообеспечению КА при потере ориентации СБ на Солнце;
- по кинетическому моменту (1) в операторе 18.
Для обеспечения проверки выполнения условия (2) производят измерение текущего уровня заряженности АБ ET(tp) на момент времени tp.
Необходимо подчеркнуть, что при проведении съемки ориентация СБ на Солнце не обеспечивается или обеспечивается частично. Поэтому для работы бортовых систем и оптико-электронного модуля полностью или частично используется электроэнергия вторичных источников питания - АБ. В проектной разработке КА его энергообеспечение с использованием аккумуляторов при штатном электропотреблении аппарата всегда обеспечивает своими запасами необходимые потребности для проведения съемки поверхности Земли. Однако на интервале режима ИСО+Р1 возможны аномальные ситуации, приводящие к нарушению расчетного энергобаланса. Именно в этой ситуации, при невыполнении условия (2), «живучесть» аппарата обеспечивается переходом в момент времени tp из режима активной СО в режим «пассивной» закрутки с ориентацией СБ на Солнце.
В случае, когда условие (1) в операторе 18 выполняется, производится разворот КА в ОСК, и оператор 19 реализует режим съемки поверхности Земли, при этом в процессе съемки оператор 20 осуществляет контроль текущего времени до момента tk завершения съемки t:=tk.
В случае если условие (1) в операторе 18 не выполняется, целесообразно проводить приведение кинетического момента СГ с использованием ЭМИО к заданным значениям. Однако указанная целесообразность должна обеспечиваться бортовыми запасами электроэнергии с учетом того, что до 20% затрат энергии может приходиться на работу ЭМИО. Поэтому в операторе 21 производится расчетный прогноз энергобаланса КА при начальном уровне (начальных условиях) заряженности АБ Ет (tp) на полетном интервале от tp до момента времени tzs=t0z-Δtw начала проведения пассивной закрутки КА на Солнце, где Δtw - продолжительность закрутки КА с учетом прихода энергии от СБ при ИСО, расхода на работу бортовых потребителей (включая ЭМИО) и заряд АБ. В результате прогноза получаем уровень заряженности АБ E2(tZS) на момент времени tzs, который должен обеспечить энергией КА на теневом участке орбиты, т.е. должно выполняться условие

где E2(tZS) - прогнозное значение уровня заряженности аккумуляторных батарей на момент времени tzs, ΔEZ - необходимо достаточный уровень заряженности аккумуляторных батарей для работы бортовых систем космического аппарата в условиях режима пассивной закрутки на теневом участке орбиты продолжительностью Δtz=tkz-t0z с учетом резервного времени по энергообеспечению КА при потере ориентации СБ на Солнце.
На вход оператора 21, рассматриваемого алгоритма может прийти также сообщение из оператора 20 о завершении сеанса съемки поверхности Земли. В таком случае начальные условия уровня заряженности АБ ET(tk) будут отличаться от предыдущего случая, поэтому производим их измерение в момент времени tk. При этом прогноз энергобаланса будет осуществляться на интервале от tk до tzs. В процессе прогноза получаем уровень заряженности АБ E2(tZS) на тот же момент времени tzs, который также должен обеспечить выполнение условия (3).
Прогноз энергобаланса производим по известным расчетным зависимостям, учитывающим приход электроэнергии от СБ, токопотребление на работу бортовых служебных систем КА, включая СГ и ЭМИО (см. например [1], стр. 150).
Выполнение условия (3) по одному из двух возможных случаев позволяет проводить в операторе 22 выполнение режима ИСО+Р2 с разгрузкой СГ от накопленного кинетического момента с использованием ЭМИО до момента времени t=tzs. При этом контроль по времени поддержания указанного режима осуществляет оператор 23.
В момент времени tzs, а также в моменты времени tp или tk в случае невыполнения одного из условий (2) или (3) соответственно проводим пассивную закрутку КА на Солнце. В первом случае режим закрутки является расчетным. В двух других случаях к режиму закрутки приводят нарушения проектно-расчетного энергобаланса КА на интервалах полетного времени, по которым производятся соответствующие проверки энергетического обеспечения выполнения планируемых режимов.
Как следует из алгоритма, оператор 24, обеспечивающий проведение пассивной закрутки на Солнце, всегда реализует указанный режим перед началом теневого участка орбиты. Преимущества такого динамического состояния КА заключаются в следующем:
обеспечивается минимальное потребление электроэнергии на управление КА при отсутствии прихода энергии от СБ;
в случае аномальной ситуации, приводящей к полному разряду АБ, по выходу КА из теневого участка орбиты его СБ будут направлены на Солнце, что позволит продолжить управление аппаратом от «тока Солнца» и начать восстановление его энергетических запасов.
Таким образом, обеспечивается работоспособность КА при прохождении теневого участка орбиты.
Момент выхода КА из теневого участка контролируется оператором 25 и по его завершении в операторе 26 проверяется выполнение условия

где E3 - значение, определяющее необходимо достаточный уровень
заряженности аккумуляторных батарей для обеспечения проведения инерциальной солнечной ориентации с указанной разгрузкой силовых гироскопов от накопленного кинетического момента до момента времени tp на (n+1)-м витке с учетом резервного времени по энергообеспечению КА при потере ориентации СБ на Солнце.
Таким образом, текущий уровень заряженности АБ должен быть необходимо достаточным для обеспечения проведения ИСО с разгрузкой СГ от накопленного кинетического момента при помощи ЭМИО до момента времени tp на очередном (n+1)-м витке. В случае выполнения указанного условия производится повторный цикл построения и поддержания ИСО с разгрузкой СГ от накопленного кинетического момента и последующим вышеуказанным проведением съемки поверхности Земли. Если же условие не выполняется, приоритет управления КА направлен на заряд АБ. Таким образом, сохраняется пассивная закрутка КА при ориентации СБ на Солнце до момента времени tp. Далее, решение о продолжении режима пассивной закрутки принимается в операторе 17 с учетом выполнения условия (2). Аналогичные решения по выполнению указанного режима принимаются на каждых последующих витках в моменты времени tk и tkZ соответственно в операторах 21 и 26, контролирующих выполнение условий (3) и (4).
В процессе проведения режима пассивной закрутки КА с ориентацией СБ на Солнце производится, как правило, постоянный контроль выполняемости режима. Для этого по датчикам постоянно контролируется текущая величина тока прихода Isb от СБ, и в случае выполнения условия Isb≤0,8In, где In - номинальное значение тока СБ, производится переход в режим построения ИСО по току СБ. Построение ИСО считают завершенным при Isb=0,95In, после чего переходят в исходный режим пассивной закрутки.
Переход к управлению полетом КА с незапланированной съемкой на витке производится заданием в операторе 27 (см. фиг. 4) режима ИСО+Р3. По заданию указанного режима в момент времени tP3 производится измерение текущего уровня заряженности АБ ET(tP3) и проверка в операторе 28 выполнения условия

где Е4 - значение, определяющее необходимо достаточный уровень заряженности аккумуляторных батарей для обеспечения проведения режима ИСО+Р3 до момента времени t0z на запланированном витке с учетом резервного времени по энергообеспечению КА при потере ориентации СБ на Солнце.
Если условие (5) выполняется, в течение запланированного витка производится разгрузка СГ с учетом выполнения условия (1) в операторе 18 до момента времени tzs. Далее, безусловно, управление КА по оператору 23 (см. фиг. 3) переводится в режим пассивной закрутки на теневом участке орбиты. Если условие (5) не выполняется, в операторе 24 реализуется режим пассивной закрутки при ориентации СБ на Солнце.
В указанный режим пассивной закрутки КА переводится также в случае достижения условий (1) разгрузки СГ. При этом предварительно в операторе 16 проверяется возможность работы при внеплановом задании режима съемки.
В процессе закрутки подтверждается по моментам времени начала t0z (оператор 29) и tkz (оператор 25) завершения теневого участка орбиты, при нахождении КА в теневом конусе Земли. В случае, когда аппарат не находится в тени, в операторе 30 проверяется условие выполнимости режима ИСО+Р3 с учетом получаемого заряда АБ ET(tB) в процессе закрутки

где Е5 - значение, определяющее необходимо достаточный уровень заряженности
АБ для обеспечения проведения режима ИСО+Р3 до момента времени t0z на запланированном витке с учетом текущего заряда батарей и резервного времени по энергообеспечению КА при потере ориентации СБ на Солнце.
Если условие (6) выполняется, то производится выполнение режима ИСО+Р3. Если нет - выполнятся режим пассивной закрутки.
Таким образом, происходит чередование проведения режимов закрутки космического аппарата с режимами разгрузки силовых гироскопов от накопленного кинетического момента с учетом заряженности аккумуляторов в пределах допустимых уровней и нахождения кинетического момента силовых гироскопов в допустимых пределах разгрузки, до перехода в режим орбитальной ориентации для очередной съемки поверхности Земли. При этом для задействования алгоритма на съемку необходимо задать моменты времени начала t0 и конца tk съемки поверхности Земли на планируемом витке.
На фиг. 5 представлена блок-схема системы, реализующей способ управления КА ДЗЗ, при этом введены обозначения:
31 - система служебного канала управления (ССКУ);
32 - средства управления бортовой аппаратурой (СУБА);
33 - бортовые вычислительные средства (БВС);
34 - средства управления движением и навигации (СУДН);
35 - система энергоснабжения (СЭС);
36 - цифровая вычислительная машина (ЦВМ);
37 - устройство сопряжения ЦВМ с датчиками СУД (УС-1);
38 - устройство сопряжения ЦВМ с ЭМИО (УС-2);
39 - гироскопический измеритель вектора угловой скорости (ГИВУС);
40 - ЭМИО;
41 - блок управления (БУ) ЭМИО;
42 - исполнительный орган (ИПО) ЭМИО (всего три, см. [2]);
43 - комплект СГ (всего восемь двигателей-маховиков, см. [2]) (КМ);
44 - комплект звездных датчиков (ЗД).
На фиг. 6 также показан мультиплексный канал обмена МКО, выполненный по ГОСТ Р52070-2003. При этом БВС 33, СУБА 32, СУДН 34 и программное обеспечение входят в состав БКУ (см. [3]).
ССКУ 31 в рамках решаемой задачи обеспечивает:
- вхождение в связь с наземными станциями в ориентированном и не ориентированном режимах полета КА и формирование сигнала для обеспечения траекторных измерений;
- прием и обработку принятой с наземных средств командной информации;
- прием от БВС 33 кадра телеметрии КА и формирование телеметрического сигнала с последующей выдачей его на наземные средства НКУ;
- формирование и передачу на наземные средства НКУ квитанций о прохождении массивов цифровой информации;
- прием и ретрансляцию на ЗС СКУ для измерения параметров орбиты КА (дальности и радиальной составляющей вектора скорости).
СУБА 32 решают в процессе своего функционирования следующие задачи:
- распределение электроэнергии потребителям, коммутация и токовая защита фидеров электропитания бортовой аппаратуры от СЭС 35;
- прием командной информации от БВС 33 и ССКУ 31, обработка и распределение команд на управляемые системы;
- реконфигурация средств управления;
- обеспечение начального включения средств управления, технологических и защитных операций.
Функциональное программное обеспечение ЦВМ 36 БВС 33 на программных средствах СУДН 34 в рамках технического предложения, решает следующие задачи:
- расчет и поддержание ориентации с необходимым угловым движением относительно инерциальной системы координат или орбитальной системы координат для обеспечения работы целевой аппаратуры;
- разгрузка накопленного кинетического момента инерционных исполнительных органов КМ 43 СГ;
- построение и поддержание ИСО, обеспечивающей максимальный энергоприход с СБ;
- проведения пассивной закрутки КА при ориентации СБ на Солнце.
СУДН 34 построена по принципу корректируемой бесплатформенной инерциальной навигационной системы (БИНС). Путем интегрирования составляющих абсолютной угловой скорости, измеряемой ГИВУС 39, БИНС вычисляет положение связанных осей изделия КА относительно инерциального базиса. БИНС образует совокупность аппаратных и программных средств, входящих в состав БВС 33. Выставка и коррекция БИНС осуществляется с использованием ЗД 44 [2,3].
При этом УС-137 предназначены для приема информации от ЦВМ 36, ее преобразования и выдачи в приборы и системы КА, а также для приема информации от приборов и систем КА, ее преобразование и выдачи в ЦВМ 36. УС-2 38 предназначены для измерения сигналов аналоговых, температурных и дискретных телеметрических датчиков, преобразования сигналов в цифровой код, первичной обработки и фильтрации телеметрической информации и выдачи ее в ЦВМ 36.
ЭМИО 40 предназначен для создания управляющего магнитного момента соответствующего знака при взаимодействии с магнитным полем Земли для разгрузки инерционных исполнительных органов - маховиков КМ 43.
В процессе своего функционирования ЭМИО 40 по командам управления из БВС 33 формирует управляющие воздействия вокруг центра масс КА.
В состав ЭМИО 40 КА входят три исполнительных органа - катушки с сердечниками (по тексту «ИПО ЭМИО» 42) и БУ 41 ЭМИО 40. Интерфейс с СУБА 32 реализован двумя фидерами питания. Одним фидером запитывается шина основного комплекта БУ 41 ЭМИО 40, вторым фидером - шина резервного комплекта БУ 41 ЭМИО 40.
БУ 41 формирует:
- телеметрические сигналы о пришедших командах управления;
- сигнал о наличии тока в обмотке ИПО 42;
- сигнал «короткого замыкания» в аппаратуре ЭМИО 40;
- входное питание для ИПО 42 ЭМИО 40 соответствующего знака.
KM 37 СГ предназначен для создания управляющих моментов, воздействующих на КА в режимах стабилизации и программных поворотов. Управляющий момент двигателя-маховика создается реакцией на корпус прибора, возникающей при разгоне или торможении ротора двигателя-маховика. Значение управляющего момента пропорционально ускорению вращения ротора и его моменту инерции. Для приведения ротора во вращение используется бесконтактный двигатель постоянного тока. Двигатель-маховик может работать в режимах разгон, торможение и выбег. При разгоне (торможении) действует управляющий момент в соответствии с управляющим сигналом, заданным программным обеспечением БКУ [2, 3].
На фиг. 6 представлена схема проведения съемки на рабочем участке 3 орбиты (фиг. 1), при этом принята следующая ОСК: ось «+YOCK» направлена на центр Земли; ось «+XOCK» направлена по вектору скорости; ось «-ZOCK» дополняет систему координат до правой. Одноименные оси связанного базиса КА OXYZ после построения ориентации совпадают с осями ОСК. Начало системы координат ОСК расположено в центре масс КА.
Ширина полосы обзора относительно трассы полета не менее 700 км обеспечивается разворотом КА по крену на углы в диапазоне ±45°.
Стереосъемка участков земной поверхности выполняется с использованием разворотов КА по углу тангажа 45 в диапазоне ±30°, а также комбинированных разворотов по углам тангажа 45 и крена 46. Кроме указанных, на фиг. 6 введены дополнительные обозначения: 47 - угол рыскания; 48 - траектория движения КА; 49 - траектория движения подспутниковой точки.
Предложенный способ управления КА ДЗЗ реализуется при помощи описанного программно-аппаратного комплекса (фиг. 5) в соответствии с представленными алгоритмами управления (фиг. 3, 4).
Техническое решение в предложенном способе направлено на повышение живучести системы управления КА ДЗЗ, реализованной на базе программно-аппаратных средств БКУ. Под живучестью понимается свойство системы адаптироваться, противостоять и сохранять минимальный набор критически важных функций в условиях непредвиденных (аварийных, нештатных) воздействий на систему внешних и внутренних дестабилизирующих факторов.
В данном случае, решение направлено на энергообеспечение КА в течение резервного времени работы бортовых систем в случае непредвиденного перехода на электроснабжение от вторичных источников энергоснабжения - АБ - на световых участках орбиты.
На протяжении полета КА ДЗЗ при выполнении всех запланированных полетных операций производится контроль уровня заряженности АБ и его сравнение с допустимыми значениями. При этом в допустимые значения входит часть заряда АБ, направленная на управление КА для восстановления ориентации СБ на Солнце в случаях ее потери. Допустимые значения выбираются в зависимости от текущего состояния энергопотребления КА и планируемых к выполнению динамических режимов с использованием СГ. Через предельно допустимые уровни заряженности аккумуляторных батарей, устанавливаемые для каждого режима, производится управление резервным временем энергообеспечения КА, позволяющим на протяжении всего полета в непредвиденных ситуациях обеспечить работу бортовых систем. Указанное минимальное резервное время в зависимости от способов восстановления ориентации СБ на Солнце для КА ДЗЗ различных классов может составлять от 20 до 45 минут при условии энергообеспечения аппаратов от АБ.
Кроме того, техническое решение позволяет обеспечить «выживание» КА при полностью разряженных АБ после выхода из теневой части орбиты. За счет закрутки КА с использованием СГ перед входом в конус земной тени с ориентацией СБ на Солнце сохраняется его одноосная инерциальная ориентация и после выхода из тени.
Одноосную ориентацию аппарата обеспечивают гироскопические реакции силовых стабилизаторов. При этом дрейф ориентированной оси будет зависеть только от величин кинетического момента  и внешнего возмущающего момента (см. [4], Гл. 6).
и внешнего возмущающего момента (см. [4], Гл. 6).
В рассмотренном примере величина суммарного кинетического момента маховиков после закрутки составляла ~6 Н⋅м⋅с. А дрейф составляет после 35 минут полета КА на теневом участке орбиты по угловому отклонению продольной оси менее одного градуса.
Ориентация СБ на Солнце при полностью разряженных АБ позволяет обеспечить электроэнергией работу БВС 33, которые реализуют режим управления КА при минимальном бортовом потреблении и постоянной ориентации СБ на Солнце с максимальным аккумулированием электроэнергии в аккумуляторах СЭС.
Таким образом, предложенный способ управления КА ДЗЗ с использованием СГ позволит обеспечить живучесть аппарата по энергообеспечению на протяжении всего срока его активного существования.
ЛИТЕРАТУРА
1. Ковтун B.C., Митрикас В.В., Платонов В.Н., Ревнивых С.Г., Суханов Н.А. Математическое обеспечение проведения экспериментов при управлении ориентацией космического астрофизического модуля «Гамма» // Техническая кибернетика. 1990. №3. С. 144-157.
2. Богачев А.В., Платонов В.Н., Тимаков С.Н. Анализ возможности обеспечения точностных характеристик стабилизации перспективного космического аппарата, предназначенного для дистанционного зондирования Земли // Космонавтика и ракетостроение. 2013. №2. С. 83-89 - прототип.
3. Микрин Е.А. Бортовые комплексы управления космических аппаратов. Изд. МГТУ им. Н.Э. Баумана, Москва, 2014.
4. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М., «Наука», 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2015 |
|
RU2614467C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА С СИСТЕМОЙ СИЛОВЫХ ГИРОСКОПОВ | 2000 |
|
RU2176972C1 |
| Способ управления ориентацией космического аппарата | 2021 |
|
RU2760818C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2736522C1 |
| Способ увеличения срока эксплуатации аккумуляторных батарей на космических аппаратах | 2018 |
|
RU2689887C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2291819C2 |
| СПОСОБ УПРАВЛЕНИЯ СНАБЖЕННЫМ СОЛНЕЧНЫМИ БАТАРЕЯМИ КОСМИЧЕСКИМ АППАРАТОМ | 2018 |
|
RU2679094C1 |
Изобретение относится к управлению полетом специализированных космических аппаратов (КА). Способ включает построение инерциальной солнечной ориентации КА системой силовых гироскопов, измерение векторов их кинетических моментов, поддержание данной ориентации с одновременной разгрузкой гироскопов. При этом на определённых участках орбиты проводят в определённом сочетании друг с другом операции закрутки КА, измерения и сравнения с предельно допустимым уровня заряда аккумуляторных батарей (АБ), контроля энергобаланса КА, разгрузки силовых гироскопов, зарядки АБ от солнечных батарей. Эти операции увязывают с процессами запланированной и незапланированной съемки поверхности Земли. Техническим результатом изобретения является повышение ресурса КА. 6 ил.
Способ управления космическим аппаратом дистанционного зондирования Земли, включающий построение инерциальной солнечной ориентации космического аппарата с использованием системы силовых гироскопов, измерение вектора кинетического момента в каждом из исполнительных органов, поддержание указанной ориентации с одновременной разгрузкой силовых гироскопов при помощи электромагнитных исполнительных органов до получения значений модулей кинетического момента, лежащих в пределах между нижним и верхним допустимыми значениями кинетического момента исполнительных органов, определение моментов времени начала и завершения съемки поверхности Земли, разворот космического аппарата из инерциальной солнечной ориентации в орбитальную ориентацию к моменту времени начала съемки поверхности Земли, поддержание орбитальной ориентации для проведения съемки поверхности Земли до момента времени завершения съемки, разворот космического аппарата из орбитальной ориентации в инерциальную солнечную ориентацию с проведением повторного цикла ее поддержания и одновременной указанной разгрузкой силовых гироскопов от накопленного кинетического момента до начала теневого участка орбиты, отличающийся тем, что измеряют на текущем витке перед началом указанных динамических режимов уровень заряженности аккумуляторных батарей, с учетом которого определяют текущий энергобаланс космического аппарата на интервале предстоящего динамического режима, сравнивают указанные текущие значения с нижними предельно допустимыми уровнями заряженности аккумуляторных батарей для каждого режима и, если текущие значения превышают предельно допустимые значения, проводят динамические режимы, а если не превышают - проводят закрутку космического аппарата при ориентации солнечных батарей на Солнце, при этом закрутку проводят также и перед началом теневого участка орбиты, в процессе закрутки производят зарядку аккумуляторных батарей на световой части орбиты с прекращением разгрузки силовых гироскопов от накопленного кинетического момента, а после окончания теневого участка орбиты, а также перед началом проведения динамических режимов на последующих витках производят повторные указанные проверки до завершения процесса запланированной съемки поверхности Земли, далее на витках с незапланированной съемкой проводят разгрузки силовых гироскопов и закрутки космического аппарата с измерением текущего уровня заряженности аккумуляторных батарей, при этом в процессе разгрузки силовых гироскопов проверяют, превышает ли текущий уровень заряженности аккумуляторных батарей значение нижнего допустимого уровня заряженности, и если превышает, то продолжают режим разгрузки силовых гироскопов до получения значений модулей кинетического момента исполнительных органов, лежащих в пределах между нижним и верхним допустимыми значениями, а если не превышает - проводят закрутку космического аппарата с прекращением разгрузки силовых гироскопов от накопленного кинетического момента, при этом в процессе закрутки космического аппарата и зарядки аккумуляторных батарей сравнивают измеренные значения с верхним предельным уровнем заряженности аккумуляторных батарей, необходимым для проведение режима разгрузки силовых гироскопов, и в случае превышения измеренными значениями верхнего предельного уровня заряженности и ненахождения модулей указанных векторов исполнительных органов в пределах между нижним и верхним допустимыми значениями кинетического момента, повторно проводят режим разгрузки силовых гироскопов, далее чередуют проведение режимов закрутки космического аппарата с режимами разгрузки силовых гироскопов от накопленного кинетического момента с учетом заряженности аккумуляторных батарей в пределах допустимых уровней и нахождения кинетического момента силовых гироскопов в допустимых пределах разгрузки до перехода в режим орбитальной ориентации для очередной съемки поверхности Земли.
| Богачев А.В., Платонов В.Н., Тимаков С.Н | |||
| Анализ возможности обеспечения точностных характеристик стабилизации перспективного космического аппарата, предназначенного для дистанционного зондирования Земли | |||
| Космонавтика и ракетостроение | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пуговица | 0 |
|
SU83A1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ ПРИ ЗОНДИРОВАНИИ АТМОСФЕРЫ ЗЕМЛИ | 2006 |
|
RU2325310C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2293690C2 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| US 4358076 А, 09.11.1982 | |||
| US 6019320 А, 01.02.2000 | |||
| СПОСОБ ИЗВЛЕЧЕНИЯ МАГНИЯ ИЗ ПРИРОДНЫХ КРЕМНИЙСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2318888C1 |

