Изобретение относится к области экспериментальной аэродинамики и может быть использовано в аэродинамических трубах.
Известно устройство для изменения угла атаки модели в аэродинамической трубе, содержащее каретку, установленную на направляющих стойку, основание державки для исследуемой модели, шарнирно закрепленные на стойке, параллелограммный механизм, включающий в себя тяги и неподвижные опоры [1]
Устройство включает в себя систему из шарнирных параллелограммных механизмов, кинематически связанных основание державки модели с приводами и с неподвижными опорами.
Недостатком данного устройства является чрезмерная сложность кинематической схемы и недостаточная жесткость системы параллелограммных механизмов, подверженной изгибным деформациям, скручиванию и перекосам при воздействии на модель аэродинамических нагрузок. При этом имеют место значительные и неконтролируемые линейные смещения модели от заданного положения, а также вибрации, вносящие погрешность в результаты эксперимента.
Известное устройство для изменения угла атаки модели [2] выбранное за прототип, содержит каретку с направляющими и параллелограммный механизм, образованный стойкой, телескопически установленной в каретке, поворотным основанием державки, тягой и соединенным с неподвижной опорой двуплечим рычагом, при этом центр вращения модели размещен на прямой, параллельной стойке, и удален от опоры рычага на расстояние, равное длине стойки. При этом достигается повышение надежности за счет того, что аэродинамические нагрузки, воздействующие на модель летательного аппарата и державку, передаются на корпус трубы через жесткие элементы конструкции стойку, каретку, направляющие. Количество составных элементов кинематической схемы минимально, что приводит к упрощению конструкции.
Однако, в условиях больших боковых аэродинамических нагрузок, воздействующих на модель при изменении углов тангажа либо рыскания, надежность устройства, принятого за прототип, ограничена Ограничен также диапазон изменения углов атаки, не предусмотрена возможность пространственных перемещений модели летательного аппарата.
Задачей изобретения является расширение диапазона перемещений, повышение точности установки модели и надежности восприятия боковых нагрузок и моментов от аэродинамических сил за счет повышения жесткости конструкции, снижения опорных реакций и уменьшения угловых погрешностей в кинематических звеньях устройства. При этом достигаются следующие технические эффекты:
увеличение диапазона изменения углов атаки модели,
возможность смещения модели вдоль оси трубы (регулировка положения центра вращения) в зависимости от размеров модели и вида эксперимента,
возможность реализации быстрого ввода модели в поток после запуска трубы (с целью облегчения запуска и обеспечения сохранности модели в высокоэнтальпийных эжекторных аэродинамических трубах),
возможность изменения угла рыскания модели.
Технический результат достигается тем, что устройство для угловых и линейных перемещений модели летательного аппарата в аэродинамической трубе, содержащее каретку, установленную на направляющих, привод ее поступательного перемещения, параллелограммный механизм, образованный стойкой, поворотной платформой, тягой и рычагом, державку модели и шарнирные опоры рычага, при этом державка модели крепится к поворотной платформе, снабжено станиной, плоскими направляющими, дополнительными направляющими и стопорами, при этом плоские направляющие каретки установлены на станине и выполнены в виде двух консольно выступающих балок с дополнительными направляющими, на которых установлены с возможностью поступательного перемещения соосные шарнирные опоры рычага со стопорами, причем стойка установлена с возможностью плоскопараллельного перемещения в плоских направляющих, выполненных на торце каретки, а рычаг охватывает снаружи консольную часть станины и балки.
С целью ввода модели в поток после запуска трубы поворотная платформа снабжена дополнительным подвижным основанием державки модели с направляющими и приводом перемещения подвижного основания, при этом поворотная платформа выполнена коленообразной.
С целью изменения угла рыскания модели станина снабжена приводом ее вращения, круговыми направляющими или поворотной осью, радиально закрепленной в рабочей части трубы.
На фиг. 1 и 2 приведены продольный и поперечный разрезы устройства (схемы), на фиг. 3 его внешний вид с дополнительным устройством для ввода модели в поток (по п. 2 формулы), на фиг. 4 и 5 варианты схемы устройства с возможностью одновременного изменения углов атаки и рыскания модели, а также ввода ее в поток после запуска трубы (по п. 2 и 3 формулы).
Устройство содержит станину 1 с установленными на ней плоскими направляющими, выполненными в виде двух консольно выступающих балок 2 и 3, между которыми помещена каретка 4 с приводом поступательного действия. На торце каретки выполнены плоские направляющие 5 и 6, в которых установлена с возможностью плоскопараллельного перемещения стойка 7 параллелограммного механизма. Стойка 7 посредством оси 8 соединена с проушинами поворотной платформы 9, которая предназначена для крепления державки 10 модели летательного аппарата; таким образом сочленение представляет собой плоский шарнир, база которого предопределена выбором ширины стойки 7, имеющей прямоугольное сечение. Стойка 7 соединена с рычагом 11 (через сферический шарнир). Рычаг 11 охватывает снаружи консольную часть станины 1 и направляющие балки 2 и 3, подвешен к последним посредством пары соосных шарнирных опор 12 и дополнительно соединен с поворотной платформой 9 через тягу 13 со сферическими шарнирами. Стойка 7 и тяга 13 равны по длине и параллельны друг другу. Таким образом детали 7, 9, 11 и 13 образуют параллелограммный механизм, обеспечивающий при поступательном перемещении каретки 4 вращение платформы 9 вокруг неподвижной точки, соответствующей заданному положению центра вращения модели. При этом центр вращения модели расположены на прямой, параллельной стойке 7 и перпендикулярной совместной оси шарнирных опор 12 рычага 11, и отстоит от оси вращения рычага на расстоянии, равном длине стойки и тяги 13.
С целью регулирования положения центра вращения модели направляющие балки 2 и 3 снабжены дополнительными продольными направляющими 14, на которых и расположены с возможностью поступательного перемещения шарнирные опоры 12 рычага параллелограммного механизма. При этом шарнирные опоры снабжены стопорами 15 для их фиксации относительно дополнительных направляющих 14 балок 2 и 3 и стопорами 16 для их сцепления с поворотной платформой 9.
При необходимости быстрого ввода и вывода модели из потока поворотная платформа 9 снабжена также дополнительным подвижным основанием 17 державки модели с направляющими и приводом 18 перемещения подвижного основания, например, поступательного действия, при этом платформа выполнена коленообразной (п. 2 формулы, фиг. 3, 4, 5 ).
Для реализации возможности поворота модели в горизонтальной плоскости станина 1 снабжена приводом ее вращения 19, круговыми направляющими 20, например, с применением опоры качения, см. фиг. 4, либо поворотной осью 21, радиально закрепленной в рабочей части трубы, например, на кронштейне 22, см. фиг. 5 (п. 3 формулы).
Работает устройство следующим образом.
При поступательном перемещении каретки 4 по направляющим 2 и 3 происходит плоскопараллельное смещения стойки 7, поворот рычага 11 и перекос шарнирного параллелограмма. При этом кинематика устройства обусловливает поворот платформы 9 вокруг фиксированного относительно трубы и модели центра вращения, т.е. изменение угла атаки модели.
При снятии шарнирных опор 12 со стопоров 15, фиксирующих положение оси вращения рычага 11 относительно продольных направляющих балок 2 и 3, и при сцеплении с поворотной платформой 9 посредством стопоров 16 осуществляется блокировка параллелограммного механизма от угловых перемещений и его фиксация относительно каретки 4. В этом случае при включении привода поступательного перемещения каретки происходит смещение вдоль оси трубы самой каретки и присоединенного к ней параллелограммного механизма с узлом подвески модели летательного аппарата. Таким образом смещение модели вдоль оси трубы осуществляется при фиксированном значении угла атаки модели (задействованы стопоры 16), а изменение угла атаки после фиксации положения шарнирных опор 12 рычага 11 параллелограммного механизма (задействованы стопора 15).
Благодаря консольному вылету направляющих балок 2 и 3, охватываемых извне рычагом 11, и выносу шарнирного параллелограмма за торец каретки 4 обеспечивается широкий диапазон изменения угла атаки и регулировки положения центра вращения модели вдоль оси трубы.
Боковые нагрузки и моменты от воздействующих на модель аэродинамических сил через широко разнесенные соосные шарнирные сочленения поворотной платформы 9, массивную прямоугольную стойку 7 и каретку 4 жестко передаются станине механизма и воспринимаются корпусом трубы. При этом рычаг 11 и тяга 13 передают только нагрузки, действующие в плоскости шарнирного крепления поворотной платформы 9, и боковых нагрузок не воспринимают.
Ввод и вывод из потока осуществляется за счет перемещения приводом 18 подвижного основания 17, к которому крепится державка модели, см. фиг. 3, 4, 5. Поскольку при этом перемещается только одно звено устройства, масса перемещаемых деталей и, следовательно, потери на трения и совершаемая приводом работа минимальны, благодаря чему обеспечивается необходимое быстродействие. При включении привода 19, см. фиг, 4 и 5, происходит поворот станины в плоскости, параллельной продольной оси трубы, и изменяется положе модели по углу рыскания. При этом поворот модели по углам атаки и рыскания происходит без линейных перемещений ее центра вращения в камере рабочей части трубы, т.к. последний расположен в точке пересечения оси вращения подвижной платформы 9 по углу атаки с осью вращения станины 1, которая задана положением круговых направляющих 20, либо оси 21.
Таким образом, совокупность отличительных признаков изобретения обусловливает компактность и жесткость устройства, высокую надежность и точность фиксации модели, в том числе, в условиях больших боковых нагрузок и моментов от воздействующих на модель аэродинамических сил.
По сравнению с прототипом изобретение позволяет расширить диапазон изменения угла атаки примерно в 2 раза, до 80o, осуществить изменение в широких пределах угла рыскания модели, а также ввод и вывод модели из потока в течение пуска трубы.
В случае, когда нет необходимости менять угол рыскания (например, при изменении угла тангажа путем поворота модели относительно оси крепления хвостовой державки), реализуется возможность продольного перемещения модели относительно сопла аэродинамической трубы на величину до 1,5 диаметров сопла, что существенно расширяет возможности эксперимента (варьирование в широких пределах размеров моделей и видов эксперимента, в том числе связанных с применением оптических методов исследования).
Использование: в области экспериментальной аэродинамики. Сущность изобретения: устройство для угловых и линейных перемещений модели летательного аппарата в аэродинамической трубе содержит станину, на которой установлены направляющие, выполненные в виде двух консольно выступающих балок с дополнительными направляющими, на которых установлена каретка, привод ее поступательного перемещения, параллелограммный механизм, образованный стойкой, поворотной платформой, тягой и рычагом, державку модели и соосные шарнирные опоры рычага со стопорами, установленные на дополнительных направляющих с возможностью поступательного перемещения, при этом державка модели крепится к поворотной платформе, стойка установлена с возможностью плоскопараллельного перемещения в плоских направляющих, выполненных на торце каретки, а рычаг охватывает снаружи консольную часть станины и балки. В частном случае использование поворотная платформа снабжается дополнительным подвижным основанием державки модели с направляющими и приводом перемещения подвижного основания, при этом поворотная платформа выполняется коленообразной, кроме того, станина может быть снабжена приводом ее вращения, круговыми направляющими или поворотной осью, радиально закрепленной к рабочей части трубы, что позволяет расширить диапазон перемещений, повысить точность установки модели и надежность восприятия боковых нагрузок и моментов от аэродинамических сил. 2 з.п. ф-лы, 5 ил.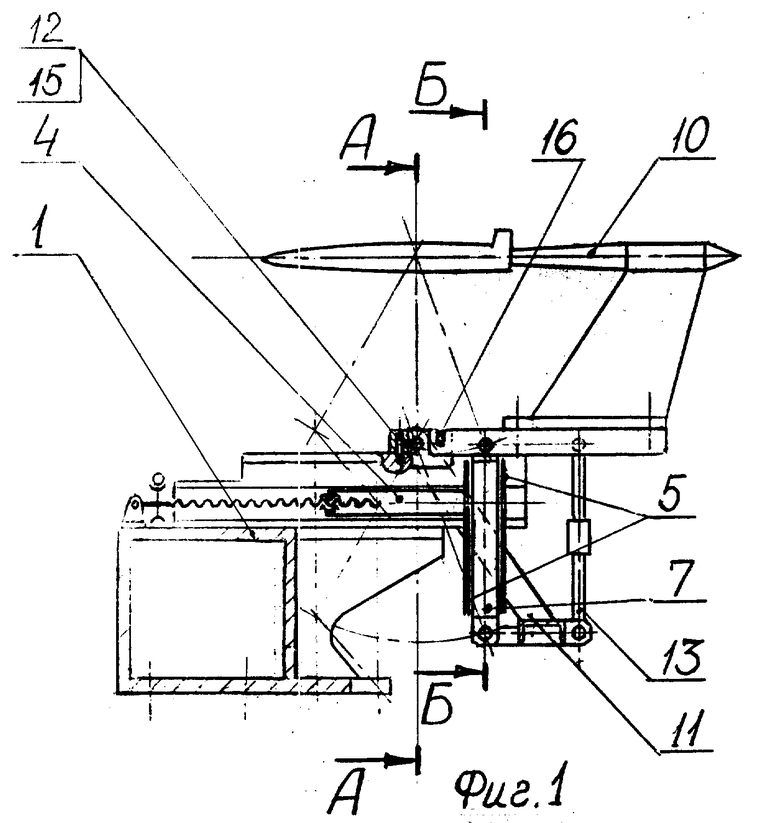
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 312538, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 811983, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

