Рассматриваемое изобретение относится к области авиационной техники и предназначено для обеспечения поперечно-путевой управляемости двухдвигательного маневренного самолета на больших углах атаки при использовании отклонения реактивных струй двигателей (отклонения векторов тяги двигателей).
Для современных маневренных самолетов характерно практическое исчезновение поперечно-путевой управляемости на углах атаки свыше 30o.35o из-за исчезновения эффективности аэродинамических органов управления (рулей), в первую очередь рулей направления.
С целью обеспечения управляемости самолета в указанном выше диапазоне углов атаки используется отклонение вектора тяги реактивных двигателей самолета с помощью различных устройств.
Известен способ управления маневренным двухдвигательным самолетом на больших углах атаки, заключающийся в отклонении струй реактивных двигателей в вертикальной плоскости симметрии самолета (см. работу: Barham R.W. Thrust Vector Aided Maneuvering of the YF-22 Advanced Tactical Fighter Prototype. В сб. AGARD Meeting on Technologies for Highly Maneuverable Aircraft, Oct. 1993, p. 5 1 5 14).
Недостатком данного способа является то, что при этом обеспечивается управляемость на больших углах атаки только по тангажу (при отклонении векторов тяги правого и левого двигателей в одну сторону) и по крену относительно продольной оси самолета (при отклонении векторов тяги правого и левого двигателей в разные стороны); управление самолетом в канале рыскания по-прежнему осуществляется с помощью аэродинамических рулей направления, а следовательно, поперечно-путевая управляемость самолета на больших углах атаки практически отсутствует, так как невозможно управлять вращением самолета относительно вектора скорости.
Задачей настоящего изобретения является обеспечение поперечно-путевой управляемости двухдвигательного маневренного самолета на больших углах атаки при использовании отклонения реактивной струи каждого двигателя в одной плоскости.
Указанная задача достигается тем, что в способе управления маневренным самолетом, при котором отклоняют рули направления и элероны, а реактивные струи правого и левого двигателей отклоняют каждую в одной плоскости, одновременно с отклонением рулей направления отклоняют элероны и реактивные струи правого и левого двигателей самолета в направлении вверх-наружу или вниз-внутрь, при этом если рули направления отклоняют направо, то реактивную струю правого двигателя отклоняют вверх-наружу, а реактивную струю левого двигателя отклоняют на такой же угол вниз-внутрь, и наоборот, одновременно отклоняют элероны на углы, определяемые зависимостью
где δэ угол отклонения элеронов;
mx,yВТ аэродинамические коэффициенты моментов крена и рыскания от отклонения реактивных струй;
mx,yРН аэродинамические коэффициенты моментов крена и рыскания от отклонения рулей направления; производные аэродинамических коэффициентов моментов крена и рыскания элеронов по углу отклонения;
производные аэродинамических коэффициентов моментов крена и рыскания элеронов по углу отклонения;
Ixx,yy моменты инерции самолета относительно связанных осей Ox и Oy;
α угол атаки самолета.
На фиг. 1 приведена схема устройства для реализации предлагаемого способа управления.
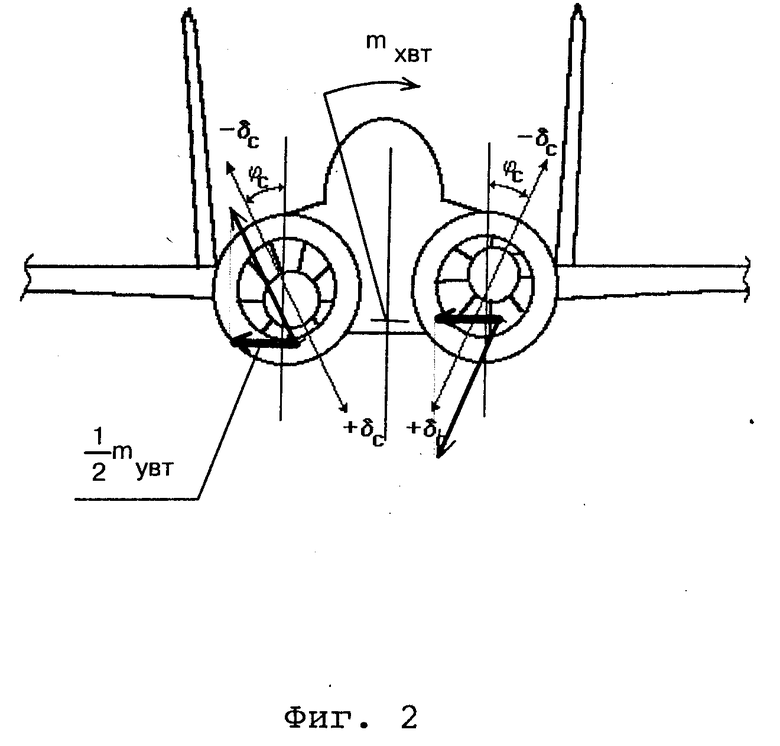
На фиг. 2 приведена схема сил и моментов, действующих на самолет при предлагаемом способе управления.
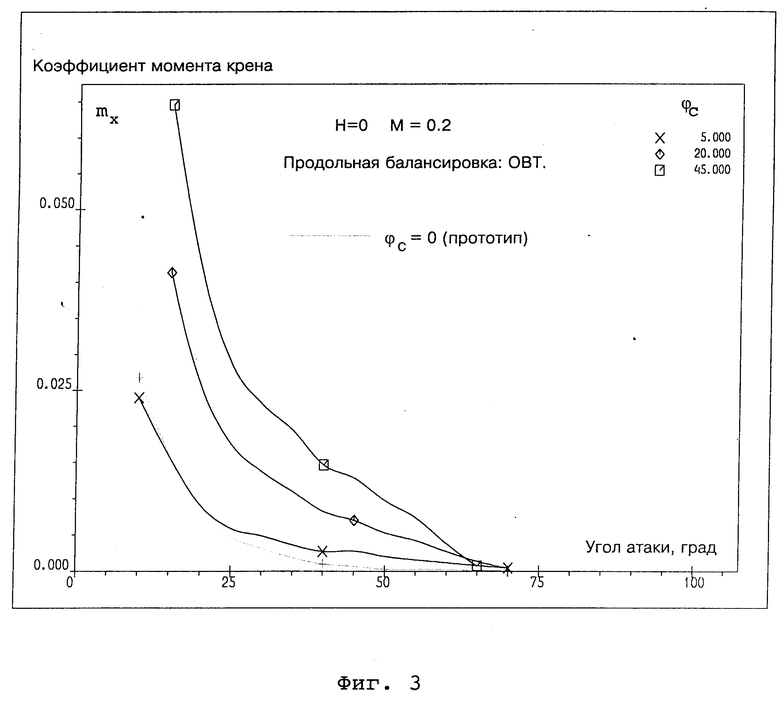
На фиг. 3 представлены зависимости располагаемого момента крена самолета при использовании предлагаемого способа управления и без него для режима полета: высота H 0, число Маха M 0,2 и в условиях продольной балансировки самолета с помощью отклонения векторов тяги обоих двигателей в вертикальной плоскости (при одновременном отклонении в одну сторону).
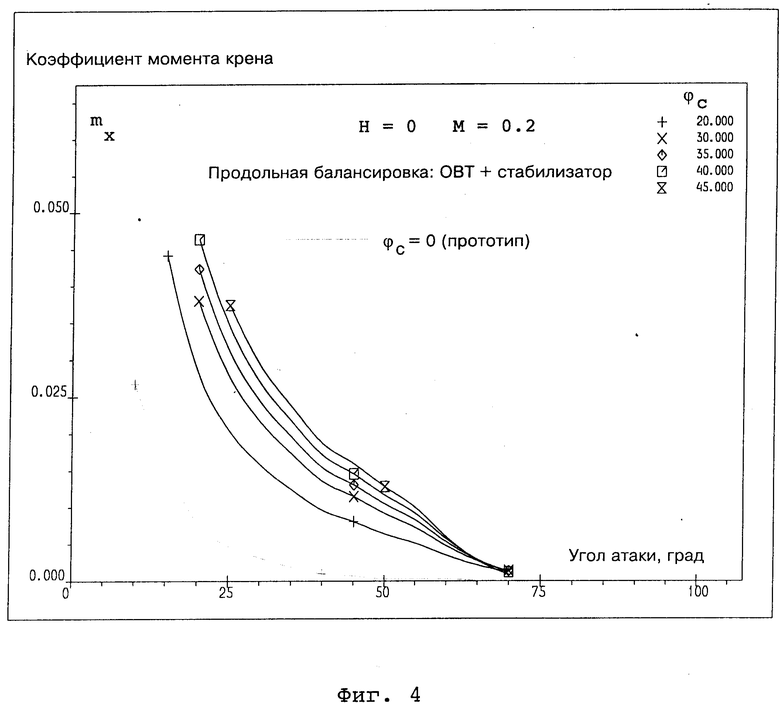
На фиг. 4 представлены зависимости располагаемого момента крена самолета при использовании предлагаемого способа управления и без него для режима полета: высота H 0, число Маха M 0,2 и в условиях продольной балансировки самолета с помощью одновременного отклонения стабилизатора (руля высоты) и векторов тяги обоих двигателей (в вертикальной плоскости).
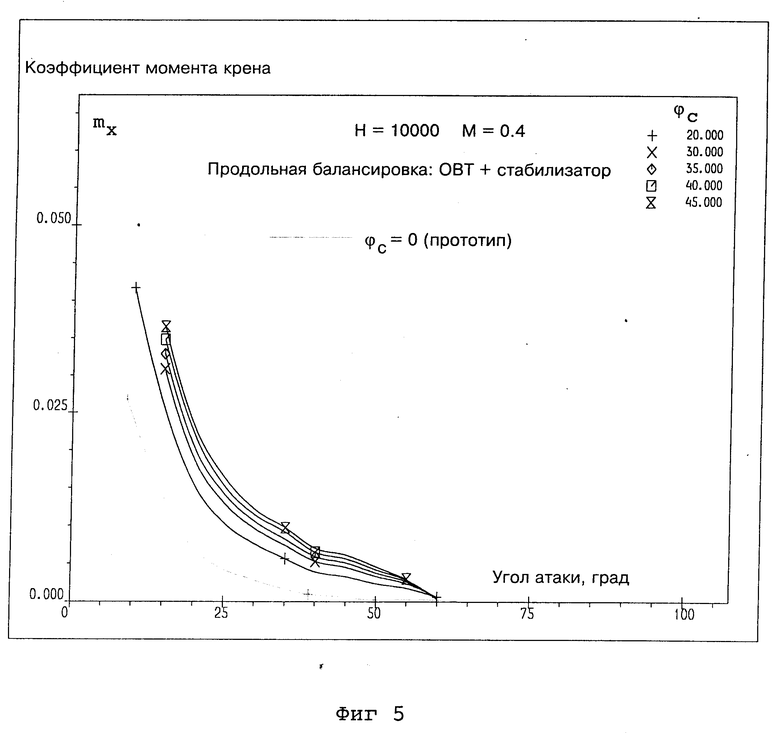
На фиг. 5 представлены зависимости располагаемого момента крена самолета при использовании предлагаемого способа управления и без него для режима полета: высота H 10 км, число Маха M 0,4 и в условиях продольной балансировки самолета с помощью одновременного отклонения стабилизатора (руля высоты) и векторов тяги обоих двигателей (в вертикальной плоскости).
В качестве устройства для реализации предлагаемого способа управления могут быть использованы отклоняемые в одной плоскости поворотные реактивные сопла, выполненные, например, также, как поворотные сопла в указанном выше прототипе, фиг. 1. Для этого каждый двигатель самолета оборудуется поворотным соплом 1, при этом плоскость отклонения каждого сопла выполняется наклоненной к вертикальной плоскости симметрии самолета на угол vc, как показано на фиг. 1. Помимо этого на самолете имеются рули направления 2 и элероны 3.
Для управления самолетом в соответствии с предлагаемым способом отклоняют рули направления на некоторый угол, при этом на самолет действуют моменты крена и рыскания Мx,yРН, определяемые через аэродинамические коэффициенты рулей направления mx,yРН следующими соотношениями:
Мx,yРН q•S•l•mx,yРН,
где q скоростной напор;
S площадь крыла;
l размах крыла.
Одновременно векторы тяги реактивных струй правого и левого двигателей отклоняют на углы +δc и -δc, как показано на фиг. 2, при этом на самолет действуют моменты рыскания и крена МyВТ и МxВТ, которые определяются следующими соотношениями:
где Pпр,лев тяга правого/левого двигателей;
zс расстояние от оси сопла до плоскости симметрии самолета;
xс расстояние от среза сопла до центра масс самолета;
соответствующие этим моментам аэродинамические коэффициенты mx,yВТ определяются соотношениями
mx,yРН Мx,yРН/(qSl)
Одновременно отклоняют элероны на угол, определяемый соотношением
где δэ угол отклонения элеронов;
mx,yВТ аэродинамические коэффициенты моментов крена и рыскания от отклонения реактивных струй;
mx,yРН аэродинамические коэффициенты моментов крена и рыскания от отклонения рулей направления; производные аэродинамических коэффициентов моментов крена и рыскання элеронов по углу отклонения;
производные аэродинамических коэффициентов моментов крена и рыскання элеронов по углу отклонения;
Ixx,yy моменты инерции самолета относительно связанных осей Ox и Oy;
α угол атаки самолета,
в результате полное угловое ускорение самолета будет ориентировано вдоль вектора скорости полета, что обеспечивает эффективное управление вращением самолета относительно вектора скорости в широком диапазоне углов атаки вплоть до углов атаки 60o.70o.
Для оценки эффективности предлагаемого способа управления самолетом и выбора рационального угла наклона плоскости поворота вектора тяги двигателей к плоскости симметрии самолета vc были выполнены расчеты суммарного момента крена mx, реализуемого при указанном способе управления для самолета типа МИГ-29. Результаты представлены на фиг. 3 5 в сравнении с суммарным моментом крена, реализуемым без предлагаемого способа управления (показан пунктирной линией) для двух режимов полета (высота H и число Маха M) и для двух вариантов продольной балансировки самолета (с помощью одновременного отклонения правого и левого векторов тяги на одинаковый угол или при совместном отклонении векторов тяги и стабилизатора). Из этих данных следует, что поперечно-путевая управляемость самолетом, определяемая величиной суммарного момента крена mx, при предлагаемом способе управления значительно больше, чем без него, и может быть обеспечена до углов атаки 60o.70o при угле наклона плоскостей отклонения векторов тяги двигателей к вертикальной плоскости симметрии самолета Φc ≥ 20o (для углов отклонения векторов тяги в этих плоскостях на ± 20o).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2028251C1 |
| РУЛЬ УПРАВЛЕНИЯ С ОСЕВОЙ КОМПЕНСАЦИЕЙ | 1997 |
|
RU2116222C1 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1996 |
|
RU2103199C1 |
| САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 2010 |
|
RU2440916C1 |
| АКТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПОДЪЕМНОЙ СИЛЫ | 1994 |
|
RU2086469C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПРИ ОТКАЗЕ ДВИГАТЕЛЯ | 2014 |
|
RU2562673C1 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2299834C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
Использование: изобретение относится к области авиационной техники. Сущность изобретения: управление двухдвигательным маневренным самолетом отклонением рулей направления и элеронов, реактивные струи правого и левого двигателей отклоняют каждую в одной плоскости, одновременно с отклонением рулей направления отклоняют элероны и реактивные струи правого и левого двигателей самолета в направлении вверх-наружу или вниз-внутрь, при этом если рули направления отклоняют направо, то реактивную струю правого двигателя отклоняют вверх-наружу, а реактивную струю левого двигателя отклоняют на такой же угол вниз-внутрь, и наоборот, причем элероны отклоняют на углы, определяемые зависимостью, приведенной в описании изобретения. 5 ил.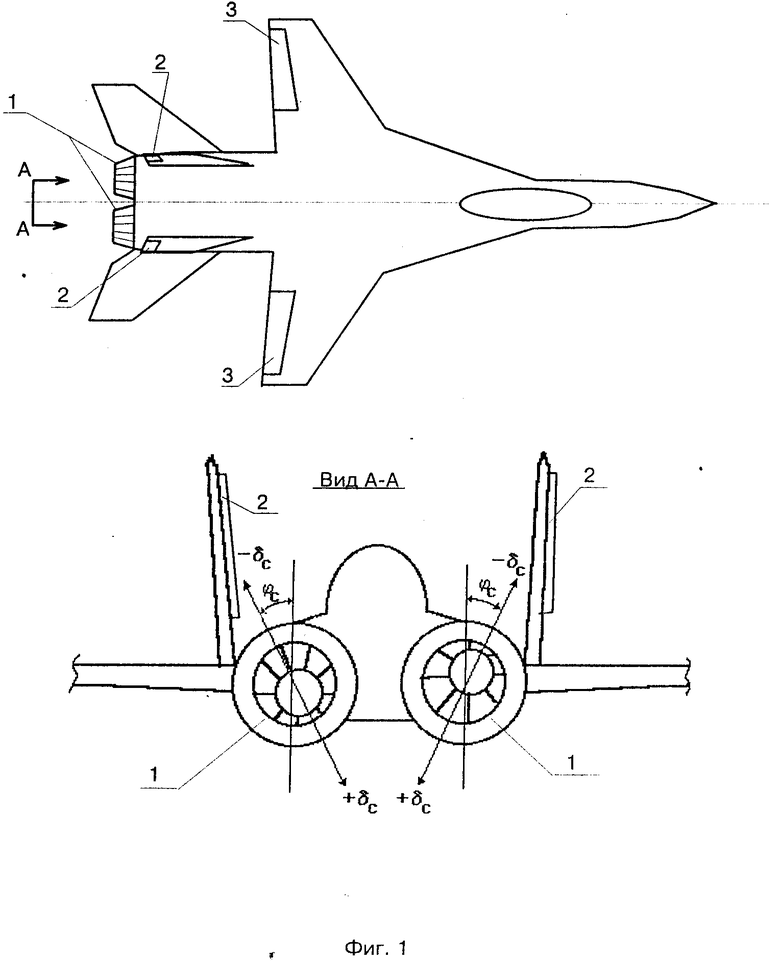
Способ управления двухдвигательным маневренным самолетом, при котором отклоняют рули направления и элероны, а реактивные струи правого и левого двигателей отклоняют каждую в одной плоскости, отличающийся тем, что одновременно с отклонением рулей направления отклоняют элероны и реактивные струи правого и левого двигателей самолета в направлении вверх-наружу или вниз-внутрь, при этом, если рули направления отклоняют направо, то реактивную струю правого двигателя отклоняют вверх-наружу, а реактивную струю левого двигателя отклоняют на такой же угол вниз-внутрь и наоборот, причем элероны отклоняют на углы, определяемые зависимостью
где δэ - угол отклонения элеронов;
mx , y вт аэродинамические коэффициенты моментов крена и рыскания от отклонения реактивных струй;
mx , y рн аэродинамические коэффициенты моментов крена и рыскания от отклонения рулей направления; производные аэродинамических коэффициентов моментов крена и рыскания элеронов по углу отклонения;
производные аэродинамических коэффициентов моментов крена и рыскания элеронов по углу отклонения;
Ix x,Iy y моменты инерции самолета относительно связанных осей Ox и Oy;
α - угол атаки самолета.
| R.W.Barham | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Advanced Tactical Fighter Prototype" в сборнике "AGARD Meeting on Technologies for Highly Maneuverable Aircraft" | |||
| October, 1993, p | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |

