Изобретение относится к технологии производства бумаги, а именно к способам подавления пульсаций волокнистых суспензий в оконечных механизмах бумагоделательных машин.
Известен способ активного подавления пульсаций давления в напорном ящике бумаго- или картоноделательной машины (заявка N 0335343 ЕПВ (ЕР)), заключающийся в том, что определяют пульсации давления в потоке рабочей суспензии, формируют управляющий сигнал, инвертируя данные замера и задерживая их на временную задержку, возникающую вследствие пространственного разнесения точек замера пульсаций и ввода компенсирующей жидкости, и подают в поток суспензии поток компенсирующей жидкости, управляемый при помощи сформированного управляющего сигнала. Поскольку в данном способе временная задержка в схеме компенсации жестко задана, то при изменении фактической задержки или случайном дрейфе параметров схемы эффективность подавления пульсаций резко падает.
Известен свободный от вышеуказанного недостатка (патент Российской Федерации N 2050063) "Способ активного подавления пульсаций давления в напорном ящике бумаго- или картоноделательной машины", заключающийся в том, что определяют пульсации давления в потоке рабочей суспензии, формируют управляющий сигнал, инвертируя данные замера и задерживая их на временную задержку, возникающую вследствие пространственного разнесения точек замера пульсаций и ввода компенсирующей жидкости, и подают в поток суспензии поток компенсирующей жидкости, управляемый при помощи сформированного управляющего сигнала, при этом производят дополнительный замер результирующих пульсаций давления в потоке суспензии после компенсации и на основе данных первичного и дополнительного замера пульсаций производят адаптивную подстройку временной задержки.
Данный способ выбран в качестве прототипа.
Прототип имеет следующий недостаток. Поскольку точка первичного замера пульсаций давления и точка подачи компенсирующей жидкости технологически разнесены и принципиально не могут находиться близко друг от друга (так как в случае их близкого расположения локальные пульсации давления, возникающие при инжекции компенсирующей жидкости в поток суспензии, приводили бы к паразитной обратной связи и сбоям схемы компенсации), то пульсации давления в точке замера, даже задержанные на соответствующую временную задержку, не полностью эквивалентны пульсациям давления в точке подачи компенсирующей жидкости.
Подобное происходит потому, что участок трубопровода (напорного ящика) между точками первичного замера пульсаций и подачи компенсирующей жидкости искажает статические (спектральные) характеристики пульсаций подобно некоему фильтру, характеристики которого в общем случае неизвестны.
Поэтому, подавая в нужной точке компенсирующую жидкость в соответствии с данными первичного замера пульсаций и адаптивно подстраиваемой задержкой, все же не удается избавиться от остаточных пульсаций, вызванных вышеописанным несоответствием спектральных характеристик.
Задачей изобретения является уменьшение мощности остаточных пульсаций.
Решение задачи достигается тем, что в способе активного подавления пульсаций давления, в котором первично замеряют пульсации давления в потоке рабочей суспензии и компенсируют данные пульсации путем подачи в поток суспензии переменного потока компенсирующей жидкости, вырабатывают сигнал управления, управляющий переменным потоком компенсирующей жидкости, инвертируя данные первичного замера пульсаций давления и учитывая временную задержку, возникающую вследствие разнесения точки первичного замера пульсаций и точки подачи компенсирующей жидкости, при этом постоянно вторично замеряют пульсации давления в потоке рабочей суспензии после компенсации и производят автоматическую подстройку временной задержки на основе данных первичного и вторичного замеров, дополнительно производят автоматическую корректировку спектра сигнала управления, т. е. адаптивно управляют спектром пульсаций компенсирующей жидкости, на основе данных первичного и вторичного замеров. При этом автоматическая корректировка спектра сигнала управления ведется так, чтобы минимизировать мощность пульсаций, получаемых во время вторичного замера.
На фиг.1 изображен пример первого устройства, реализующего предлагаемый способ; на фиг. 2 - пример второго устройства, реализующего предлагаемый способ; на фиг. 3 - пример компьютерного моделирования работы прототипа и предлагаемого способа.
Предлагаемый способ реализуют следующим образом.
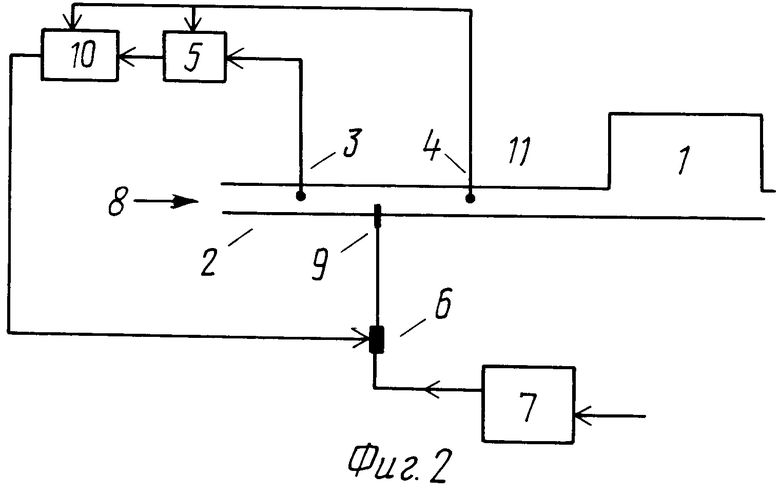
На участке трубопровода 2, подводящего рабочую суспензию 8 к напорному ящику 1, устанавливают датчик (группу датчиков), регистрирующий(ую) пульсации давления до компенсации - Pд(t) 3.
На участке трубопровода, находящемся ближе к напорному ящику либо непосредственно в самом напорном ящике, устанавливают датчик (группу датчиков), регистрирующий (ую) результирующие пульсации давления после компенсации Pп(t) 4.
Формируют управляющий сигнал C (t), инвертируя и задерживая на адаптивно меняющуюся задержку полученные данные Pд(t) и используют для подстройки задержки данные Pп(t) и адаптивный алгоритм, подобно тому, как это делается в прототипе.
Управляющий сигнал C(t), а также данные вторичного замера Pп (t), подают на адаптивную схему коррекции спектра 10, которая автоматически вырабатывает компенсирующий сигнал, корректируя спектр сигнала C (t). При этом управляющий сигнал С (t) используют как входной сигнал, а данные вторичного замера Pп(t) - как управляющий сигнал.
Компенсирующий сигнал управляет клапаном, регулирующим подачу компенсирующей жидкости 6 в поток рабочей суспензии, причем точка подачи 9 располагается на участке трубопровода, расположенном между первым и вторым датчиками (первой и второй группами датчиков), так, чтобы колебания давления в процессе компенсации (в процессе инжекции компенсирующей жидкости ) не оказывали влияния на данные Pд и Pп(t).
Адаптивная схема коррекции спектра представляет собой известную адаптивную схему со входным и управляющим сигналом [1, гл.2], настраивающуюся по какому-либо из широко известных алгоритмов [1, гл.6,8) с целью максимального уменьшения мощности результирующих пульсаций Pп(t). Начальное значение адаптивной схемы устанавливается так, чтобы компенсирующий сигнал был полностью эквивалентен управляющему сигналу C (t) (т.е. отсутствовала корректировка спектра).
Для устранения взаимного влияния двух адаптивных схем (управления задержкой 5 и управления спектром 10) и как следствие повышения эффективности подавления пульсаций рабочей суспензии данные результирующих пульсаций для адаптивного управления задержкой (в прототипе) и данные результирующих пульсаций для управления спектром компенсирующего сигнала (в предлагаемом способе) могут сниматься с разных датчиков, дистанционно разнесенных один от другого.
Для случая, когда технологически в пульсациях давления в суспензии наиболее выражены низкочастотные колебания (ниже 50 Гц), для их максимального подавления адаптивно управление спектром выполняют частотнозависимым.
Примеры устройств, реализующих предлагаемый способ, показаны на фиг.1-2.
Устройство на фиг.1 работает следующим образом. Как и а прототипе, пульсации давления рабочей суспензии до компенсации - Pд(t), воспринимаются датчиком 3 и поступают на вход адаптивной схемы управления задержкой 5 как входной сигнал, а результирующие пульсации Pп(t), воспринимаемые датчиком 4, - как управляющий сигнал. Адаптивная схема управления задержкой 5 подстраивает задержку и инвертирует и задерживает данные Pд(t), вырабатывая управляющий сигнал C(t), точно так же, как это делается в прототипе.
Далее управляющий сигнал C(t) поступает на вход адаптивной схемы управления спектром 10 как входной сигнал, а данные результирующих пульсаций Pп(t) - как управляющий сигнал.
Схема 10 автоматически корректирует спектр входного (т.е. управляющего) сигнала, вырабатывая таким образом компенсирующий сигнал для манипулирования клапаном подачи компенсирующей жидкости в поток рабочей суспензии 6 из резервуара 7.
Схема, изображенная на фиг.2, работает аналогично, за исключением того, что управляющие сигналы для схем управления задержкой и спектром снимаются с разных датчиков 4 и 11, дистанционно разнесенных один от другого.
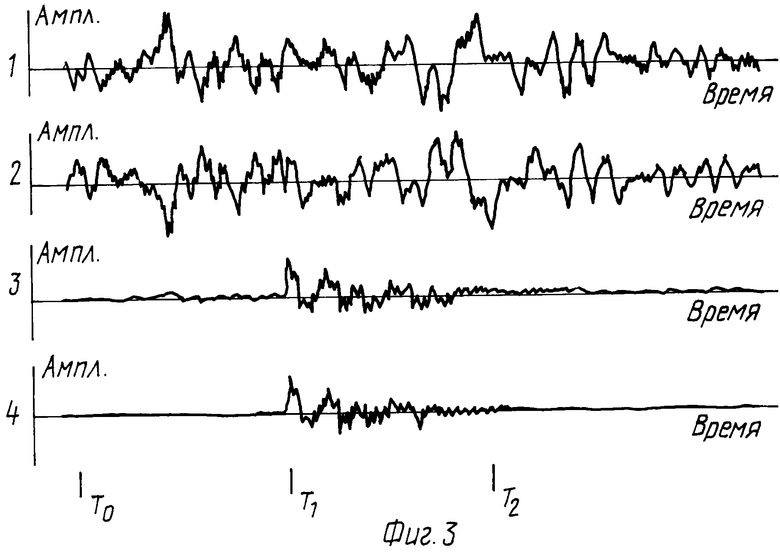
Результаты компьютерного моделирования данного способа (фиг.2) и прототипа представлены на фиг.3, где изображены: кривая 1 - пульсации давления полученные в ходе реального эксперимента (соответствуют Pд(t)); кривая 2 - инвертированные и задержанные данные Pд(t); кривая 3 - результирующие пульсации при работе прототипа; кривая 4 - результирующие пульсации при работе устройства, реализующего предлагаемый способ.
Участок кривых на интервале T0 - T1 соответствует правильно выбранному времени задержки, однако, как видно по кривой 3, при работе прототипа на этом участке все же сохраняются остаточные пульсации. В то же самое время кривая 4 иллюстрирует то, что адаптивная схема коррекции спектра полностью подавила остаточные пульсации. В момент времени T1 происходит случайное изменение времени задержки (например, из-за температурного дрейфа). Сразу же после этого адаптивная схема управления задержкой автоматически начинает подстройку задержки - видно, как на кривых 3 и 4 на участке T1 - T2 мощность результирующих пульсаций уменьшается. В данном случае работа прототипа и предлагаемого способа не отличается друг от друга. После окончания процесса адаптация задержки (участки кривых после точки T2) в случае работы прототипа (кривая 3) остаточные пульсации все же присутствуют, в то время как устройство, реализующее предлагаемый способ полностью подавило и их.
Конкретная реализация схемы коррекции спектра не представляет труда - данная схема есть не что иное, как адаптивный фильтр с двумя входами, различные схемы которого, а также алгоритмы адаптации подробно описаны в [1].
Источники информации
1. Уидроу Б., Стирнз С. Адаптивная обработка сигналов.- М.: Радио и cвязь, 1989.- 432 с.
2.Патент РФ N 2050063, кл. D 21 F 1/06, 1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УРОВНЯ ЗАПИСИ АЛЕЙНИКА | 1995 |
|
RU2078380C1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| АДАПТИВНЫЙ ЭХОКОМПЕНСАТОР | 2009 |
|
RU2412545C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ БИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМОЙ | 2004 |
|
RU2280929C1 |
| Способ компенсации синфазной помехи в микромеханическом гироскопе | 2019 |
|
RU2714955C1 |
| Устройство для компенсации звукового поля механических конструкций | 1982 |
|
SU1067527A1 |
| АДАПТИВНЫЙ ЭХОКОМПЕНСАТОР НА РЕКУРСИВНОМ ФИЛЬТРЕ | 2009 |
|
RU2412546C1 |
| СПОСОБ ОТБЕЛКИ ХВОЙНОЙ СУЛЬФАТНОЙ ЦЕЛЛЮЛОЗЫ | 1992 |
|
RU2019612C1 |
| Способ управления коммутацией электродвигателя постоянного тока и устройство для его осуществления | 1984 |
|
SU1327259A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АНТЕННОЙ РЕШЕТКОЙ ИДЕНТИЧНО ОРИЕНТИРОВАННЫХ ВЕКТОРНЫХ ИЗЛУЧАТЕЛЕЙ | 2006 |
|
RU2330356C1 |
Использование: технология производства бумаги, а именно к способам подавления пульсаций волокнистых суспензий в оконечных механизмах бумагоделательных машин. Сущность: первично замеряют пульсации давления в потоке рабочей суспензии и компенсируют данные пульсации путем подачи в поток суспензии переменного потока компенсирующей жидкости, при этом постоянно вторично замеряют пульсации давления в потоке рабочей суспензии после компенсации и на основе данных первичного и вторичного замеров производят автоматическую корректировку спектра сигнала, управляющего переменным потоком компенсирующей жидкости так, чтобы минимизировать мощность пульсаций, получаемых при вторичном замере пульсаций давления. Корректировка спектра управляющего сигнала позволяет эффективнее подавлять пульсации давления. Новым в способе является автоматическая корректировка спектра управляющего сигнала. 2 з.п. ф-лы, 3 ил.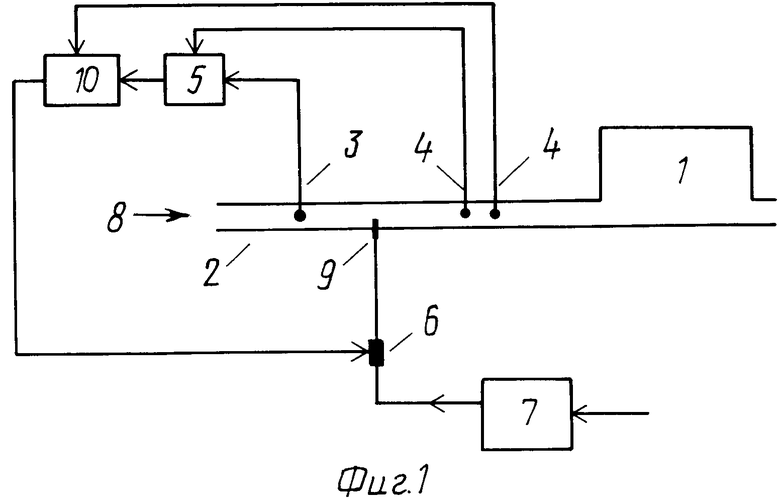
| RU, патент, 2050063, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
