Изобретение относится к области точного приборостроения, в частности к вибрационным микромеханическим гироскопам (ММГ), измеряющим угловую скорость.
В этих ММГ проводящая подвижная масса (ПМ) подвешена к опоре, закрепленной на основании с помощью упругого резонансного подвеса. Электроды, расположенные по разным осям подвеса ПМ, обеспечивают измерение перемещений ПМ и формирование сил (моментов) для управления движениями ПМ, в том числе формирование колебаний ПМ по оси первичных колебаний и измерение перемещений ПМ по оси вторичных колебаний. Для возбуждения колебаний ПМ по оси первичных колебаний в ММГ используется электронный блок, называемый блоком возбуждения первичных колебаний на частоте f1 (у современных ММГ f1>10кГц). Для формирования сил, действующих на ПМ, и измерения перемещений ПМ по оси первичных колебаний применяют электроды, которые имеют форму гребенок, при этом одни электроды расположены на ПМ (подвижные электроды), а другие, неподвижные - на основании. Такие электроды называют гребенчатыми.
Колебания ПМ по оси вторичных колебаний имеют место при действии сил Кориолиса, возникающих при вращении основания ММГ вокруг оси чувствительности ММГ. При этом ось чувствительности и оси первичных и вторичных колебаний ортогональны друг другу. Колебания ПМ, обусловленные силой Кориолиса, содержат информацию об измеряемой ММГ угловой скорости Ω, они являются полезными.
Эти колебания ПМ измеряются с помощью электродов, расположенных по оси вторичных колебаний, изменения емкостей этих электродов преобразуются в канале вторичных колебаний в сигнал, пропорциональный Ω.
Однако на них накладываются вредные колебания ПМ, которые вызываются действующими на ПМ силами, обусловленными погрешностями изготовления чувствительного элемента (ЧЭ) ММГ.
К указанным погрешностям могут быть отнесены отклонения от заданных размеров элементов подвеса ПМ и электродов, наличие остаточного давления в камере ЧЭ и т.д.
Амплитуда вредных колебаний ПМ может значительно превышать амплитуду колебаний ПМ, обусловленных Ω, что затрудняет измерение полезной составляющей колебаний и соответственно снижает точность ММГ. Вредные колебания ПМ, сдвинутые по фазе по отношению к полезным на ±90°, или силы, ортогональные к силе Кориолиса, называют квадратурной помехой. Для ее подавления используются различные способы, в частности, синхронное детектирование сигналов в канале вторичных колебаний. Для синхронного детектирования используют демодулятор с опорным сигналом, фаза которого совпадает с фазой полезного сигнала. В этом случае выделяется амплитуда полезного сигнала, а квадратурный сигнал преобразуется в высокочастотный сигнал, спектр которого начинается с частоты 2f1. Эта составляющая отфильтровывается фильтром низкой частоты. Однако, если фаза опорного сигнала нестабильна, то подавление квадратурного сигнала демодулятором оказывается недостаточным и в высокоточных ММГ применяют дополнительно различные способы компенсации квадратурной помехи.
Подробно работа вибрационных ММГ описана в литературе [1, 2]. В работе [2, стр. 101] описаны способы подавления квадратурной помехи, один из которых заключается в формировании постоянного напряжения определенной величины на так называемых квадратурных электродах.
Способы подавления квадратурной помехи в ММГ, в том числе и за счет использования квадратурных электродов, приведены в отечественных и зарубежных публикациях [3-7].
В ММГ RR-типа квадратурные электроды могут представлять собой плоские электроды в виде секторов, частично расположенных над зубцовой зоной гребенчатых электродов или отверстиями в ПМ [3, 4]. В ММГ LL-типа квадратурные электроды выполняются как гребенчатые со смещенными от центрального положения зубцами [5].
Если на квадратурных электродах сформировать компенсирующее напряжение UЭ, то за счет изменения площади перекрытия при колебаниях ПМ вдоль оси первичных колебаний между этими электродами и ПМ происходит изменение электростатической силы с частотой первичных колебаний. Эти изменения в зависимости от положения электродов относительно оси чувствительности находятся в фазе или в противофазе с квадратурной помехой, их амплитуда пропорциональна (UЭ)2 [5]. За счет выбора квадратурных электродов и подбора величины UЭ можно сформировать силы электрического поля FЭ (или моменты), которые находятся в противофазе силам (моментам), вызывающим квадратурную помеху в ММГ, и равны им по амплитуде. В этом случае сила FЭ компенсирует силы, вызывающие появление квадратурной помехи.
Таким образом компенсация квадратурной помехи в описанных выше ММГ, которые являются аналогами предложенного устройства, достигается за счет соединения источника напряжения с квадратурными электродами, при этом величина напряжения, необходимого для подавления квадратурной помехи, выбирается расчетным путем [5, формулы на стр. 10, 11] или экспериментально [фиг. 7 патента 3].
Недостатком аналогов является то, что силы, вызывающие квадратурную помеху в ММГ, могут изменяться при изменении температуры окружающей среды. Это отмечено в работе [2, стр. 101]. Поэтому при выборе фиксированного значения напряжения UЭ компенсация квадратурной помехи во всем диапазоне рабочих температур не обеспечивается, что ухудшает точность ММГ и, соответственно, сужает области применения таких ММГ.
Известны ММГ со встроенным датчиком температуры (ВДТ) и блоком температурной коррекции (БТК) выходного сигнала, на вход которого поступают сигналы с выхода канала вторичных колебаний и ВДТ [8-11]. Сигнал с выхода канала вторичных колебаний помимо сигнала, пропорционального Ω, содержит зависимую от температуры окружающей среды аддитивную составляющую. Эту составляющую после калибровки ММГ, заключающейся в определении этой составляющей при разных угловых скоростях вращения ММГ и температурах окружающей среды, компенсируют с достижимой погрешностью в БТК.
Известен ММГ с квадратурными электродами и соединенными с ними управляемыми источниками напряжения [6], который выбран в качестве прототипа. Входы для управления источниками напряжения в этом ММГ соединены с устройством преобразования сигнала, зависящего в том числе от зазора (d) между квадратурными электродами и ПМ. Изменение квадратурной помехи, обусловленное изменением температуры окружающей среды в этом ММГ, так же, как и в ММГ по патентам [3-5], приводит к ухудшению их точности.
Решаемая техническая проблема - уменьшение влияния изменений температуры окружающей среды на степень подавления квадратурной помехи квадратурными электродами.
Достигаемый технический результат - повышение точности ММГ.
Сущность изобретения заключается в том, что в ММГ со встроенным датчиком температуры, квадратурными электродами и управляемыми источниками напряжения, выходы которых соединены с квадратурными электродами, устройством преобразования сигнала, выход которого соединен со входами управляемых источников напряжения, при этом:
- выход встроенного датчика температуры соединен со входом устройства преобразования сигнала;
- устройство преобразования сигнала реализует функциональную зависимость напряжения на квадратурных электродах, компенсирующего квадратурную помеху, от выходного сигнала встроенного датчика температуры.
Предлагаемое устройство может быть применено как в ММГ RR-, так и LL-типа.
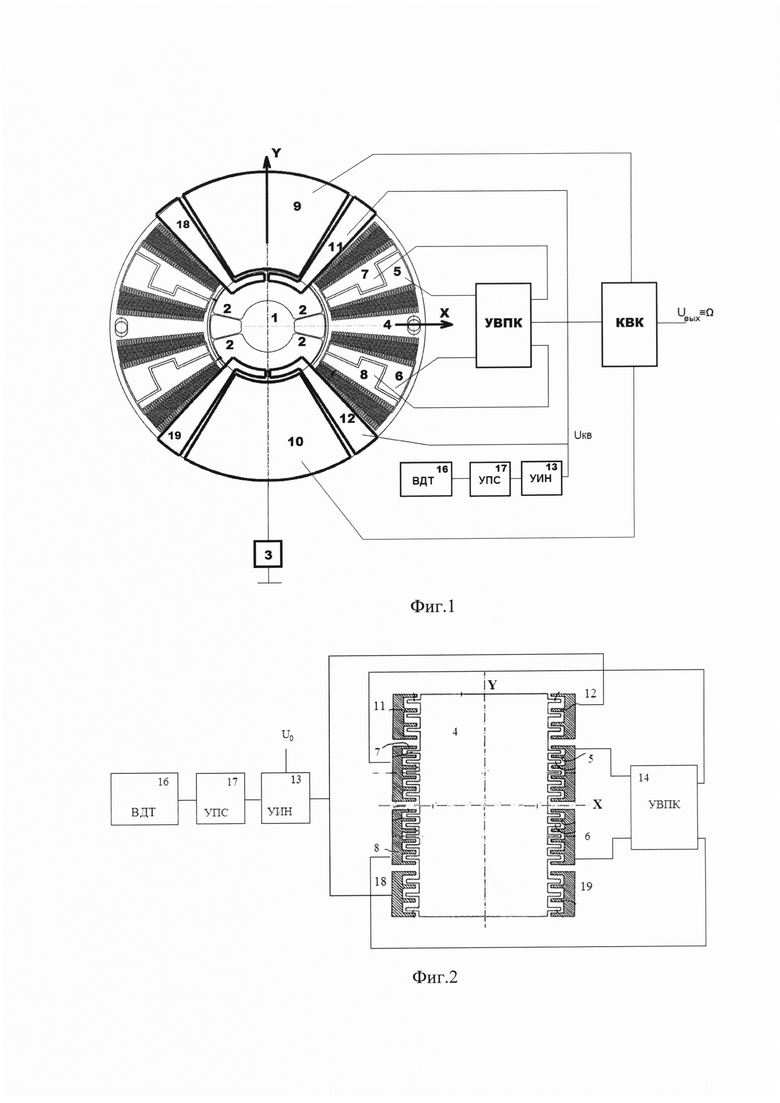
На фиг. 1 приведена блок-схема предлагаемого ММГ RR-типа, на фиг. 2 - LL-типа, описанный в патенте [5].
На фиг. 1 и 2 приняты следующие обозначения:
1 - основание, на которое подвешена ПМ;
2 - упругий резонансный подвес (далее - упругий подвес);
3 - источник переменного напряжения, подаваемого на ПМ (далее - ИПН);
4 - ПМ;
5, 6 - неподвижные гребенчатые электроды датчика угла/датчика перемещения;
7, 8 - неподвижные гребенчатые электроды датчика момента/датчика силы;
9, 10 - неподвижные плоские электроды датчика угла, расположенные на крышке ММГ над ПМ (далее - измерительные электроды);
11, 12 - неподвижные плоские электроды датчика угла, расположенные на крышке ММГ частично над зубцовой зоной ПМ (далее - первая пара квадратурных электродов);
13 - управляемый источник напряжения (УИН);
14 - устройство возбуждения первичных колебаний (УВПК);
15 - канал вторичных колебаний (КВК), включающий в себя преобразователь емкость-напряжение и демодулятор;
16 - датчик температуры, встроенный в ММГ (ВДТ);
17 - устройство преобразования сигнала, реализующее зависимость напряжения на квадратурных электродах, компенсирующего квадратурную помеху, от выходного сигнала ВДТ (далее - УПС);
18, 19 - вторая пара квадратурных электродов;
U0 - напряжение питания управляемого источника напряжения;
UКВ - напряжение, компенсирующее квадратурную помеху;
UВЫХ - выходной сигнал ММГ.
Квадратурные электроды ЧЭ LL-типа (11, 12 и 18, 19 на фиг. 2), в отличие от ЧЭ RR-типа, являются гребенчатыми. У квадратурных электродов 11, 12 зубцы на ПМ 4 смещены от центрального положения вверх по вертикали, а у электродов 18, 19 - вниз по вертикали. В зависимости от фазы квадратурной помехи с элементом 13 могут быть соединены либо электроды 12, 18, либо 11, 19.
ПМ 4 может совершать колебания вдоль оси X (ось первичных колебаний) и оси Y (ось вторичных колебаний).
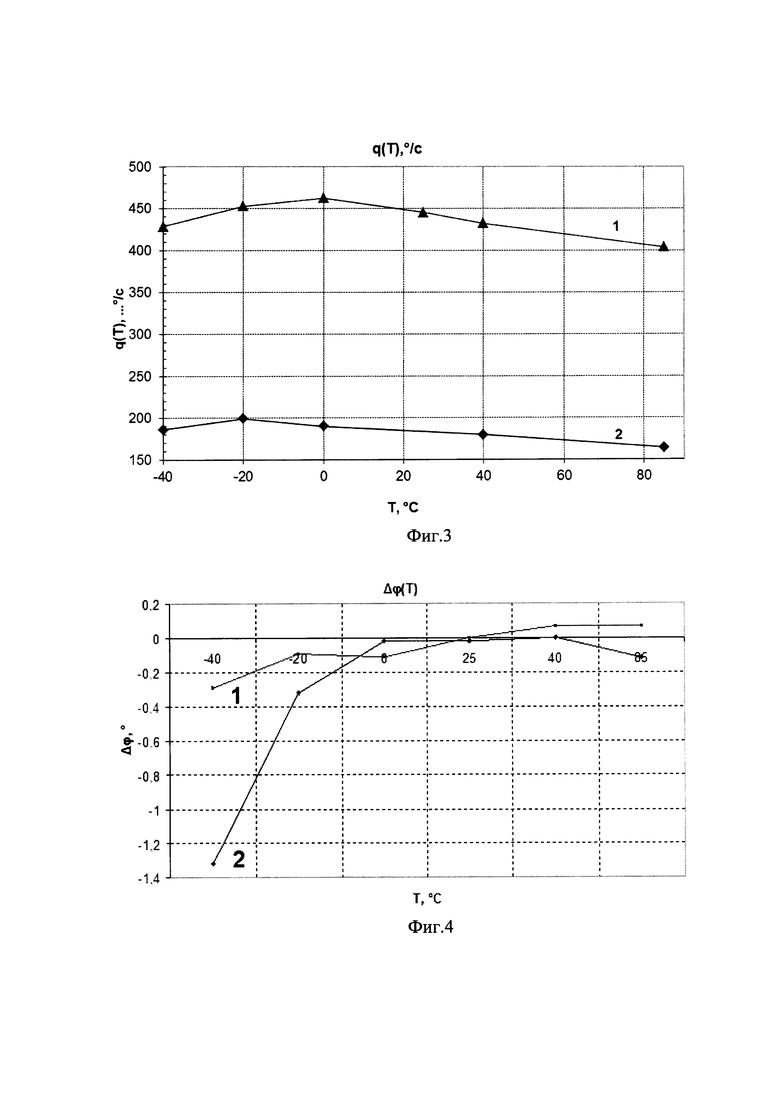
На фиг. 3 приведены экспериментально полученные зависимости квадратурной помехи от температуры окружающей среды, измеряемой с помощью ВДТ, для двух ММГ RR-типа отечественной разработки.
На фиг. 3 обозначены:
q - квадратурная помеха;
Т - температура, измеренная с помощью ВДТ;
q(T) - зависимость квадратурной помехи от температуры окружающей среды;
1 - зависимость q(T) для первого ММГ;
2 - зависимость q(T) для второго ММГ.
На фиг. 4 приведены экспериментально полученные зависимости изменения фазы опорного сигнала демодулятора (входящего в состав КВК 15, на фиг. не показан) от температуры окружающей среды для двух ММГ RR-типа отечественной разработки, в котором элементы 14, 15 реализованы за счет использования специализированной интегральной схемы, описанной в [13].
На фиг. 4 обозначены:
Δϕ - сдвиг фазы опорного сигнала демодулятора;
Т - температура, измеренная с помощью ВДТ;
Δϕ(Т) - зависимость сдвига фазы опорного сигнала демодулятора от температуры;
1 - зависимость Δϕ(Т) для первого ММГ;
2 - зависимость Δϕ(Т) для второго ММГ.
К основанию 1 с помощью упругого подвеса 2, выполненного в виде торсионов, подвешена проводящая ПМ 4, которая выполнена в виде диска, часть секторов которого выполнена в виде гребенок. ПМ 4 может перемещаться как вокруг оси, перпендикулярной к плоскости диска (ось первичных колебаний X), так и вокруг горизонтальной оси (ось вторичных колебаний Y).
Неподвижные электроды 5-8 представляют собой гребенчатые электроды, часть из которых используется при формировании датчика угла ПМ 4 (элементы 7, 8), а другие - в качестве датчика момента (элементы 5, 6). Эти электроды соединены с УВПК 14.
Источник переменного напряжения 3 соединен с ПМ 4.
Входы канала вторичных колебаний 15 соединены с измерительными электродами 9, 10, и одним из выходов УВПК 14.
Измерительные электроды 9, 10 расположены симметрично относительно горизонтальной оси. Они соединены со входами преобразователя емкость-напряжение (на фиг. 1 не показан), входящего в состав КВК 15. Варианты построения канала вторичных колебаний достаточно подробно описаны в разных публикациях, например, в [1, 2, 8].
Выход УИН 13 соединен с квадратурными электродами 11, 12.
Выход ВДТ 16 через УПС 17 соединен со входом управления УИН 13. Предложенное устройство работает следующим образом: Через межэлектродные емкости, образованные ПМ 4 и электродами 7-10 проходит ток, величина которого определяется напряжением и частотой ИПН 3 и величинами межэлектродных емкостей, которые зависят от положения ПМ 4. Эти токи преобразуются УВПК 14 в моменты, вызывающие колебания ПМ 4 вокруг оси первичных колебаний, а в КВК 15 при вращении основания с угловой скоростью Ω в сигнал, пропорциональный Ω.
Для подавления квадратурной помехи на квадратурных электродах 11, 12 с помощью УИН 13 увеличивают напряжение, наблюдая сигнал на выходе преобразователя емкость-напряжение КВК 15 при Ω=0. Если при этом амплитуда наблюдаемого сигнала падает, продолжают эту процедуру до тех пор, пока амплитуда не начнет возрастать, а фаза сигнала изменится на противоположную. Значение напряжения на электродах 11 и 12, соответствующее минимуму наблюдаемого сигнала, является компенсационным напряжением.
Если при увеличении напряжения на квадратурных электродах 11, 12 сигнал на выходе преобразователя емкость-напряжение возрастает, то необходимо подключить выход УИН 13 к другой паре квадратурных электродов, 18 и 19, расположенных симметрично электродам 11, 12 относительно оси Y.
Задавая температуру окружающей среды, например, при установке ММГ в термокамере, измеряя сигнал на выходе ВДТ 16 (UТ) и повторяя описанную выше процедуру определения компенсационного напряжения UЭ, можно получить данные, необходимые для определения зависимости напряжений, компенсирующих квадратурную помеху от выходного сигнала ВДТ 16: UЭ=f(UТ). УПС 17, реализующее эту зависимость, может быть сформировано с помощью цифровых (например, микроконтроллера с цифро-аналоговым преобразователем) или аналоговых элементов [12].
При изменении температуры окружающей среды соответствующее изменение сигнала на выходе ВДТ 16 приводит к такому изменению сигнала на выходе УПС 17, которое формирует напряжение на квадратурных электродах, соответствующее значению, при котором квадратурная помеха компенсируется.
Анализ экспериментально полученных зависимостей q(T) и Δϕ(Т), приведенных на фиг. 3, 4 демонстрирует, что:
- изменение квадратурной помехи q(T) в рабочем диапазоне температур может составлять ≈10% от ее среднего уровня. Это показывает, что подавление квадратурной помехи фиксированным значением компенсационного напряжения на квадратурных электродах недостаточно эффективно;
- с учетом изменения Δϕ на уровне 0,5-1° составляющая выходного сигнала ММГ, обусловленная квадратурной помехой, может быть оценена величиной 0,5-1°/с. Погрешность ММГ (нестабильность нулевого сигнала) при изменении температуры окружающей среды в диапазоне 125°С, оказывается на три порядка больше, чем погрешность при постоянной температуре.
- характер зависимостей q(T) показывает, что они могут быть аппроксимированы в УПС с погрешностью на уровне 1%. Это позволяет за счет реализации зависимости q(T) в УПС 17 снизить остаточное изменение квадратурной помехи в диапазоне рабочих температур до величины 0,005-0,01%, то есть снизить погрешность ММГ (нестабильность нулевого сигнала) на 2 порядка. Таким образом, за счет сохранения высокого уровня подавления помехи при работе ММГ в широком диапазоне температур, достигается повышение точности ММГ.
Заявленный технический результат подтверждается расчетным путем, проведенном при оценке составляющих погрешностей ММГ, полученных при экспериментальных исследованиях образцов датчиков.
Литература
1. Распопов В.Я. Микромеханические приборы: Учебное пособие / Тула: Гриф и К., 476 с.
2. Acar С., Shkel A., MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness, Springer, 2008, 262 pp.
3. Патент РФ №2344374.
4. Патент РФ №2320962.
5. Патент США №8104364.
6. Патент РФ №2626570.
7. Беляева Т.А. Методы компенсации квадратурной помехи в микромеханическом гироскопе RR-типа / Диссертация на соискание ученой степени кандидата технических наук, ОАО "Концерн "ЦНИИ "Электроприбор", 126 с, Санкт-Петербург, 2009, инв. №141187.
8. В.Г. Пешехонов и др. Результаты испытаний установочной партии микромеханических гироскопов rr-типа / Гироскопия и навигация, №1 (72), 2011, стр. 37-48.
9. P. Prikhodko et al. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing, Sens.Actuators A: Phys. (2013), http://dx.doi.org/10.1016/j.sna2012.12.024.
10. Некрасов Я.А., Моисеев H.B., Люкшонков P. Г., Павлова СВ., Улучшение эксплуатационных характеристик отечественного микромеханического гироскопа RR-типа / XXI Санкт-Петербургская международная конференция по интегрированным навигационным системам, 2014, стр. 226-235.
11. Результаты исследования МЭМС-гироскопа с температурной самокомпенсацией / Некрасов Я.А., Люкшонков Р. Г. // XX II Санкт-Петербургская международная конференция по интегрированным навигационным системам, 2015 г - С288 - 293.
12. Справочник по нелинейным схемам: Проектирование устройств на базе аналоговых функциональных модулей и интегральных схем. Под ред. Шейнголд Д.Х. / М.: Мир, 1977.
13. A. Ismail et al A HIGH PERFORMANCE MEMS BASED DIGITAL-OUTPUT GYROSCOPE. Transducers, 2013, Barcelona, 16-20 June 2013.
Изобретение относится к области точного приборостроения, в частности к вибрационным микромеханическим гироскопам (ММГ), измеряющим угловую скорость. Сущность изобретения заключается в том, что в ММГ со встроенным датчиком температуры, квадратурными электродами и управляемыми источниками напряжения, выходы которых соединены с квадратурными электродами, устройством преобразования сигнала, выход которого соединен с входами управляемых источников напряжения, при этом выход встроенного датчика температуры соединен с входом устройства преобразования сигнала, устройство преобразования сигнала реализует функциональную зависимость напряжения на квадратурных электродах, компенсирующего квадратурную помеху, от выходного сигнала встроенного датчика температуры. Технический результат - повышение точности ММГ. 4 ил.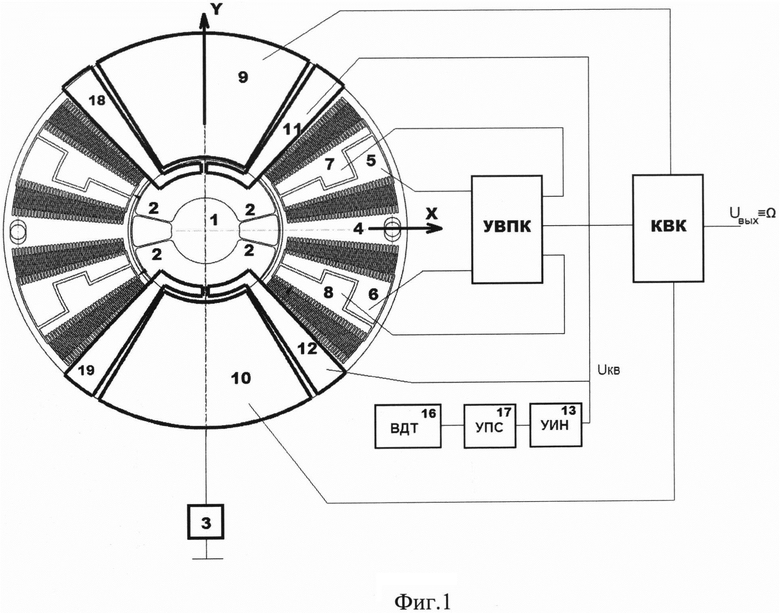
Микромеханический гироскоп, содержащий опору на основании, к которой на упругом резонансном подвесе подвешена проводящая подвижная масса, способная совершать колебания в двух взаимно перпендикулярных направлениях по осям первичных и вторичных колебаний, соединенные с устройством возбуждения первичных колебаний гребенчатые электроды, канал вторичных колебаний с измерительными электродами, расположенными по оси вторичных колебаний, квадратурные электроды, управляемый источник напряжения, соединенный с квадратурными электродами, встроенный датчик температуры, устройство преобразования сигнала, выход которого соединен с входом управляемого источника напряжения, отличающийся тем, что выход встроенного датчика температуры соединен с входом устройства преобразования сигнала, которое реализует определяемую экспериментально зависимость напряжения на квадратурных электродах, компенсирующего квадратурную помеху, от выходного сигнала встроенного датчика температуры.
| Микромеханический гироскоп RR-типа | 2016 |
|
RU2626570C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2013 |
|
RU2535248C1 |
| 0 |
|
SU178349A1 | |
| WO 2011133682 A1, 27.10.2011. | |||

