Изобретение относится к способам бесконтактного измерения в динамическом режиме смещения проводящего тела по отношению к емкостному датчику, которые могут с успехом применяться для целенаправленного измерения без каких- либо сложностей осевого смещения вала вращающейся машины или для измерения уровня жидкости в резервуаре.
Известен способ бесконтактного измерения в динамическом режиме расстояния, отделяющего поверхность первого элемента, который может быть проводящим или непроводящим, от поверхности второго проводящего элемента, близко расположенного по отношению к первому и заземленного, таких, например, как статор и ротор электрического генератора.
Соответствующий прибор содержит датчик из двух параллельных перекрывающихся проводящих пластин, электрически изолированных друг от друга, на которые подается высокочастотный (от 100 кГц до 10 МГц) сигнал заданного (от 5 до 100 В) напряжения, подключенный к блоку измерения величины тока, который соединен с блоком обработки измеренных значений тока, например, к компьютеру.
В рабочем состоянии датчик образует конденсатор с заземленным проводящим концом, емкость которого определяется следующей известной формулой:
где K = εoεr, εo - диэлектрическая постоянная вакуума (8,854 пФ/м);
εr - относительная диэлектрическая постоянная диэлектрического вещества между ближайшей к проводящему элементу пластиной датчика и проводящим элементом;
Ar - площадь перекрытия проводящего элемента и пластины датчика и
D - расстояние от поверхности ближайшей к проводящему элементу пластины датчика до проводящего элемента.
Когда на образованный таким образом конденсатор подается высокочастотный сигнал, в пластинах датчика возбуждается поддающийся измерению ток, величина которого определяется следующей формулой:
i = ω•cv, (2),
где ω = 2πf , f - частота излучаемого сигнала;
V - разность потенциалов между ближайшей к проводящему элементу пластиной датчика и проводящим элементом, и
c - упомянутая выше емкость.
Формула (1) показывает, что при постоянном значении диэлектрической постоянной K и величины перекрытия Ar емкость C и, следовательно, ток i в формуле (2) изменяются обратно пропорционально расстоянию D между датчиком и проводящим элементом, что делает возможным использовать способ бесконтактного измерения в динамическом режиме для измерения расстояния между ближайшей к проводящему элементу пластиной емкостного датчика и проводящим элементом.
Легко видеть, что прибор может быть аналогично использован для измерения другого переменного параметра в формуле (1), например, диэлектрической постоянной K или величины площади перекрытия Ar в случае, если другие параметры остаются постоянными.
Цель изобретения - создание способа с использованием упомянутой аппаратуры для бесконтактного измерения в динамическом режиме смещения заземленного проводящего тела по отношению к емкостному датчику. Способ характеризуется тем, что включает следующие операции:
(а) размещение емкостного датчика вблизи и на фиксированном расстоянии от плоскости, образуемой проводящим телом таким образом, что пластины датчика располагаются параллельно указанной плоскости, а смещение проводящего тела в плоскости изменяет величину площади перекрытия проводящего тела с емкостным датчиком;
(б) измерение тока, возбуждаемого высокочастотным сигналом в емкостном датчике и изменяющегося прямо пропорционально в зависимости от площади перекрытия проводящего тела и емкостного датчика; и
(в) определение величины смещения проводящего тела по отношению к емкостному датчику как функции измеряемого тока.
Применение этого способа не ограничено турбинами или резервуарами, так как он позволяет измерять смещение любого проводящего тела по отношению к датчику, если площадь перекрытия проводящего тела и датчика изменяется во время смещения.
Применение данного способа не ограничено определением уровня жидкости в резервуарах или обнаружением изменений состава вещества, текущего по трубопроводу, так как он позволяет, кроме того, измерять диэлектрическую постоянную любого диэлектрического вещества, расположенного между емкостным датчиком и каким-либо проводящим элементом.
На фиг. 1 показана схема осуществления способа в соответствии с изобретением; на фиг. 2 - схема способа измерения смещения проводящего тела, превышающего размерами емкостный датчик; на фиг. 3 - характеристическая кривая измерения тока по варианту выполнения изобретения, приведенному на фиг. 2; на фиг. 4a - схема способа измерения смещения узла сцепления тепловой турбины с генератором переменного тока; на фиг. 4b - детальный вид сбоку узла сцепления, показанного на фиг. 4a; на фиг. 4c - детальный вид сверху узла сцепления, показанного на фиг. 4a; на фиг. 5 - схема способа измерения смещения с использованием нескольких датчиков; на фиг. 6a - схема способа измерения уровня проводящих и сильнополярных жидкостей в проводящем резервуаре; на фиг. 6b - схема способа измерения уровня проводящих и сильнополярных жидкостей в резервуаре, выполненном из непроводящего электрический ток материала; на фиг. 7 - схема изменения, обнаружения и калибровки, используемая в рамках настоящего изобретения; на фиг. 8 - блок-диаграмма, поясняющая основные функции устройства, используемого в способе согласно изобретению.
Устройство, используемое для осуществления способа в соответствии с изобретением, содержит (фиг. 1) по меньшей мере один емкостный датчик 1 из двух проводящих и перекрывающихся пластин 2 и 3, электрически изолированных одна от другой соответствующим изолятором 4, возбуждающий и измерительный блок 5 для подачи на две пластины каждого датчика одного и того же высокочастотного сигнала при одинаковом напряжении и для измерения величины тока, возбуждаемого в пластине 3 высокочастотным сигналом, а также кабель 6, соединяющий пластины каждого датчика с блоком 5. Данный блок формирует электрический сигнал S, зависящий от измеряемого тока, который может быть передан в блок обработки данных, например, в компьютер, для выполнения измерений в соответствии со способом согласно изобретению.
Высокочастотный сигнал, подаваемый на пластины датчика, предпочтительно имеет частоту от 100 кГц до 10 МГц с пиковым напряжением от 5 до 100 В для того, чтобы избежать паразитных шумов и проблем, связанных с обратным полным сопротивлением и изоляцией. Влияние паразитных шумов может быть также уменьшено оптимальным выбором размеров пластин и расстояния между ними.
Блок обработки учитывает нелинейности, обусловленные конструкцией и физическими параметрами емкостного датчика 1, и заранее прокалиброван для выполнения точного преобразования измеряемого тока в искомый параметр, что и составляет цель измерения с использованием способа в соответствии с изобретением.
В способе бесконтанктного измерения в динамическом режиме смещения емкостный датчик 1 устанавливается с помощью соответствующих средств на фиксированном расстоянии D вблизи проводящего тела 7 так, что его пластины параллельны плоскости, в которой расположено это тело. В этой плоскости общая площадь проводящего тела и емкостного датчика образует площадь перекрытия 8. Для данного способа существенно то, что величина площади перекрытия изменяется при смещении проводящего тела по отношению к емкостному датчику, так как измеряемый ток прямо пропорционален этой величине и именно этот ток является целью измерения смещения.
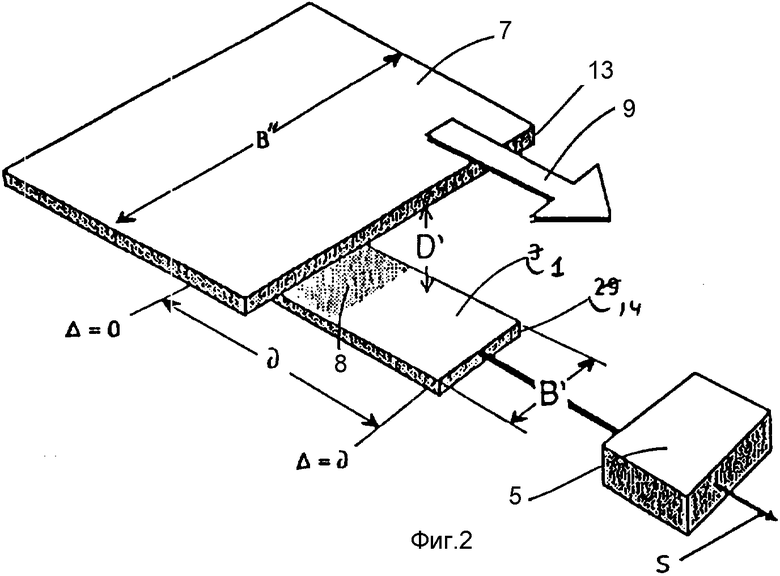
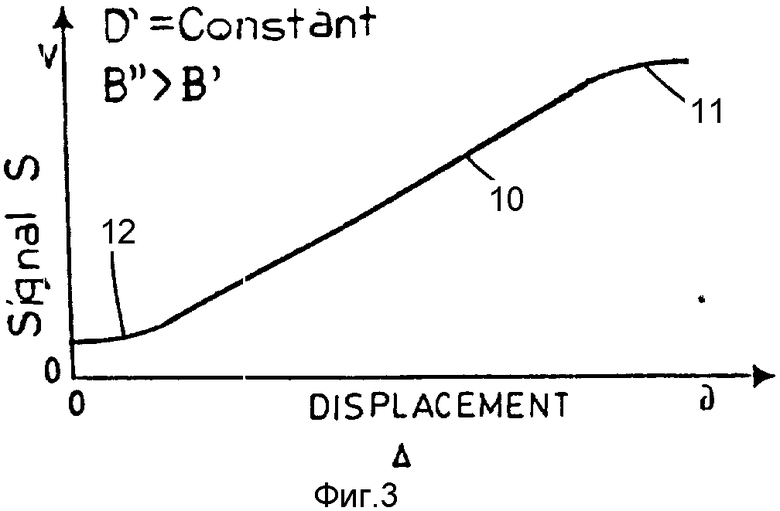
На фиг. 2 показана схема способа измерения смещения, в которой проводящее тело 7 превышает размерами емкостный датчик, а сам датчик имеет прямоугольную форму. Хотя данная форма не является существенной, она обеспечивает в данном применении некоторые представляющие особый интерес характеристики, представленные в виде графика на фиг. 3.
На фиг. 3 приведена линейная зависимость, присущая варианту выполнения изобретения, приведенному на фиг. 2, между смещением в направлении стрелки 9 проводящего тела 7 по отношению к емкостному датчику и электрическим сигналом S, возбуждаемом в блоке 5. Вид данной характеристики вытекает их того факта, что площадь перекрытия 8 линейно увеличивается в зависимости от упомянутого смещения. Кривая 10 имеет в основном линейный характер, хотя и отклоняется от линейной зависимости 11 и 12 на обоих своих концах, что связано с перечислением краем 13 проводящего тела 7 края 14 емкостного датчика.
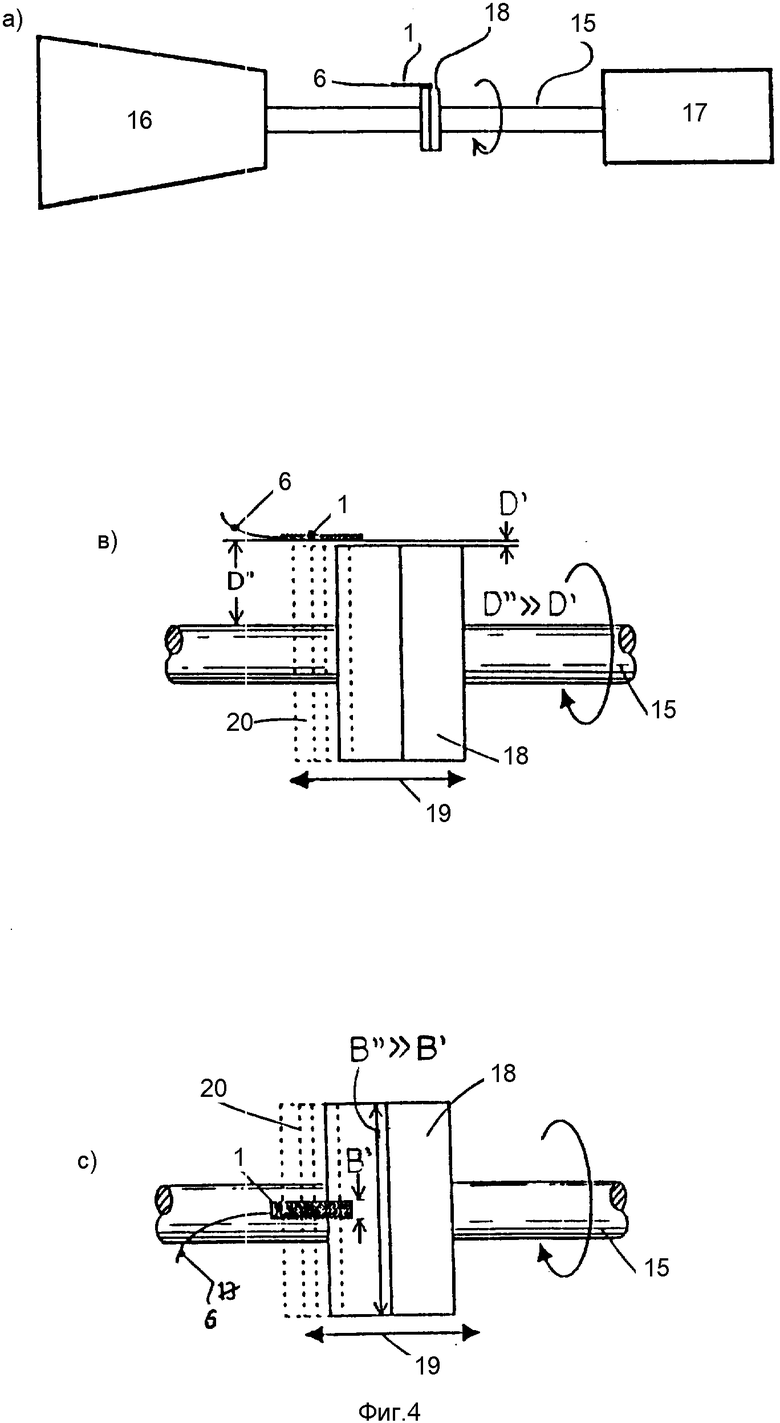
Как показано на фиг. 4a, способ измерения смещения можно применять для измерения удлинения вращающегося вала 15, соединяющего тепловую турбину с генератором 17 переменного тока. Узел 18 сцепления играет роль проводящего тела и поэтому должен быть предварительно заземлен. Как показано на увеличенных фиг. 4b и 4c, датчик 1 размещают параллельно и на фиксированном расстоянии D' от узла сцепления для того, чтобы измерять возможные смещения узла в направлении стрелки 19, представленные на чертеже пунктирными линиями 20. Необходимо, чтобы расстояние D'' между емкостным датчиком и валом 15 было много больше расстояния D' так, чтобы вал создавал пренебрежимо малые емкостные наводки вне датчика и не вносил искажений в процесс измерения смещения. Так как ширина B' емкостного датчика меньше ширины B'' узла сцепления, а также с учетом прямоугольной формы датчика соотношение между смещением и сигналом S является линейным, и таким образом, сложность последующей обработки сигнала S уменьшается.
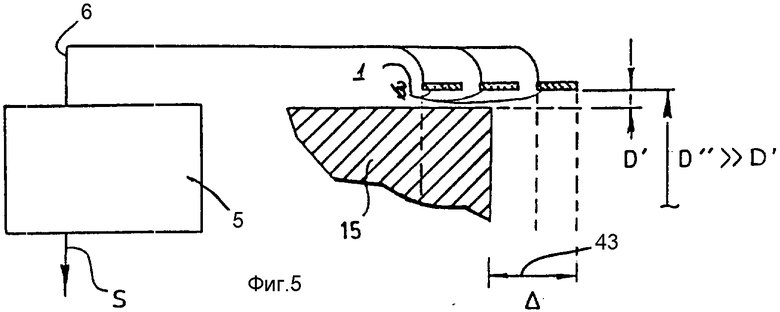
На фиг. 5 схематически изображен случай, когда смещение проводящего тела 7 в направлении стрелки 19 слишком большое и не может быть измерено одним датчиком. Возможно использовать несколько емкостных датчиков 1, установленных так, что смещение проводящего тела изменяет площадь перекрытия по крайней мере с одним датчиком, что в свою очередь изменяет величину измеряемого тока. Наиболее простым способом достижения этого результата является линейное расположение датчиков одного за другим.
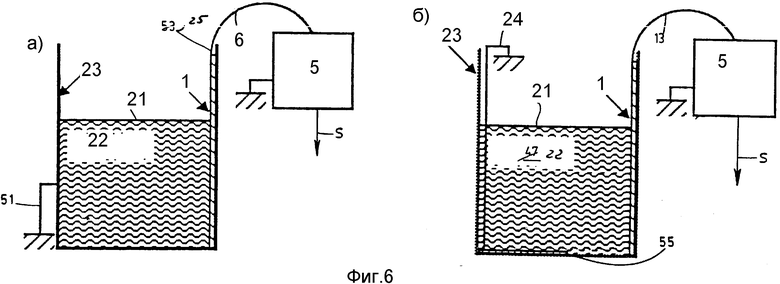
Как показано на фиг. 6a, способ измерения смещения может применяться для измерения уровня 21 жидкости 22 электрически проводящей или высокополярной, как, например, воды при определенных условиях или ртути, в резервуаре 23 из электрически проводящего материала. В этом случае жидкость играет роль проводящего вещества и может быть заземлена с помощью специального вывода резервуара, который также является проводящим. Емкостный датчик 1 может быть закреплен непосредственно на внутренней стенке 25 резервуара 23 с помощью клея или соответствующего средства и обязательно покрывается изолирующим и герметизирующим защитным слоем. Для измерения любого уровня 21 жидкости 23 в резервуаре датчик должен иметь такую же длину, как и высота стенки 25 резервуара. В случае, если резервуар выполнен из непроводящего материала, как показано на фиг. 6b, электрически проводящая и высокополярная жидкость 22 заземляется 24 с помощью заземляющего вторичного электрода 25, выполненного, например, просто в виде металлической пластинки, расположенной у дна резервуара 23 с внутренней или наружной стороны.
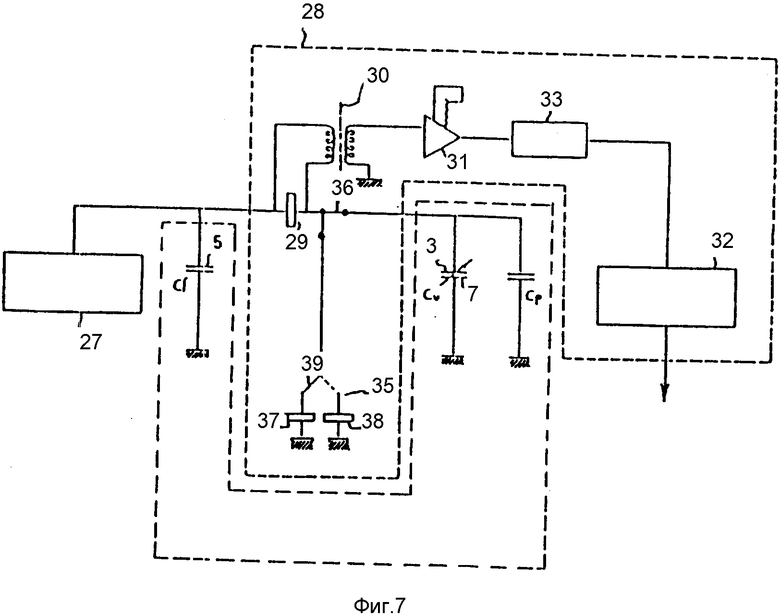
На фиг. 7 приведена блок-схема возбуждающего и измерительного блока 5 устройства, используемого в соответствии с изобретением. Схема содержит генератор 27 высокочастотных сигналов, который подключен к пластине 2 датчика 1, имеющий постоянную емкость Cf с окружающей средой. Пластина 3 датчика 1 образует с поверхностью проводящего тела 7 конденсатор с переменной емкостью Cv.
Имеется также паразитная емкость Cp, характерная для каждого типа датчика. Измеритель тока 28 содержит низкоомный резистор 29, включенный последовательно между генератором 27 и пластиной 3 датчика. Измеритель тока содержит также изолирующую цепь, соединенную с резистором 29 отдельного измерения высокочастотного сигнала напряжения на этом резисторе и для вычитания измеренного таким образом сигнала другого сигнала, пропорционального измеренному току. Цепь может включать также развязывающий трансформатор 30, одна из катушек которого подсоединена параллельно с резистором 29, а другая подключена к усилителю 31 с регулируемым усилением. Это усилитель в свою очередь соединен с амплитудным демодулятором 32 известного тока, на который сигналы от усилителя попадаются через фильтр 33. Демодулятор формирует искомый сигнал, пропорциональный измеряемому току, и передает его в соответствующий блок 34 обработки. Для автоматической коррекции дрейфа прибора измеритель 28 тока может также включать блок 35 калибровки для быстрой замены переменной емкости Cv. Блок 35, подключаемый с помощью переключателя 36, состоит и двух резисторов 37 и 38 с известными сопротивлениями и позволяет получить два опорных сигнала (высоко- и низкочастотной калибровки). Переключение резисторов производится с помощью реле 39.
Необходимо отметить, что использование блока 35 калибровки не является обязательным. В некоторых случаях оно позволяет перед каждым сбором данных учесть как дрейф усилителя, так и дрейф генератора, а также легко определить коэффициент усиления и сдвиги.
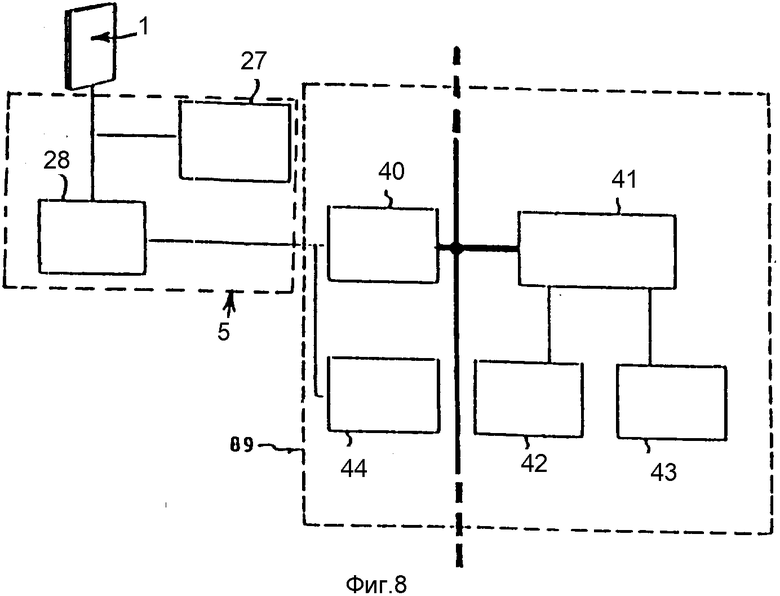
Как показано на фиг. 8, блок 34 обработки подключен к измерителю 28 тока.
В соответствии с вариантом выполнения изобретения этот блок обработки может включать схему обработки с микропроцессором 40, который обеспечивает обработку и запись сигналов тока, зарегистрированных измерителем тока, до возникновения потребности в них. При запросе этой информации сигналы могут быть переданы микропроцессором в компьютер 41, который имеет внешнее средство 42 записи (магнитные диски и др.) и средство 43 вывода (печатающее устройство и др.) В случае использования нескольких датчиков 1 компьютер 41 соединяют с микропроцессорами 40 каждого датчика 1 так, чтобы производить индивидуальную обработку записанных сигналов в каждом микропроцессоре, подключенном к своему датчику. Жирные линии на фиг. 8 показывают в качестве примера возможные соединения с другими микропроцессорами 40. Ввод данных, соответствующих зависимости ток-смещение или ток-диэлектрическая постоянная для каждого вида датчика, осуществляется раздельно для каждого типа датчика в лаборатории. Как указывалось ранее, калибровка бывает необходимой перед каждым сбором данных для учета дрейфов усилителя и генератора.
В соответствии с другим примером выполнения изобретения блок 34 обработки может включать цепь сигнализации. Эта цепь 44 сигнализации может быть установлена вместо схемы обработки или совместно с ней. Назначение этой цепи заключается в немедленной выработке сигнала сигнализации, если значение измеряемого тока соответствует установленному критическому значение смещения или диэлектрической постоянной. Применение такой цепи сигнализации, быстро устанавливаемой для постоянной работы, обеспечивает значительные преимущества, особенно в случае непрерывного и постоянного наблюдения за работой вращающихся машин, уровнем жидкости в резервуарах или загрязнениями вещества, транспортируемого по трубопроводу.
Изобретение относится к способам бесконтактного измерения в динамическом режиме смещения проводящего тела по отношению к емкостному датчику, образованному двумя параллельными перекрывающимися проводящими пластинами, электрически изолированными одна от другой, на которые подается высокочастотный сигнал заданного напряжения, а емкостный датчик подключен к прибору для измерения величины тока. 3 з.п. ф-лы, 8 ил.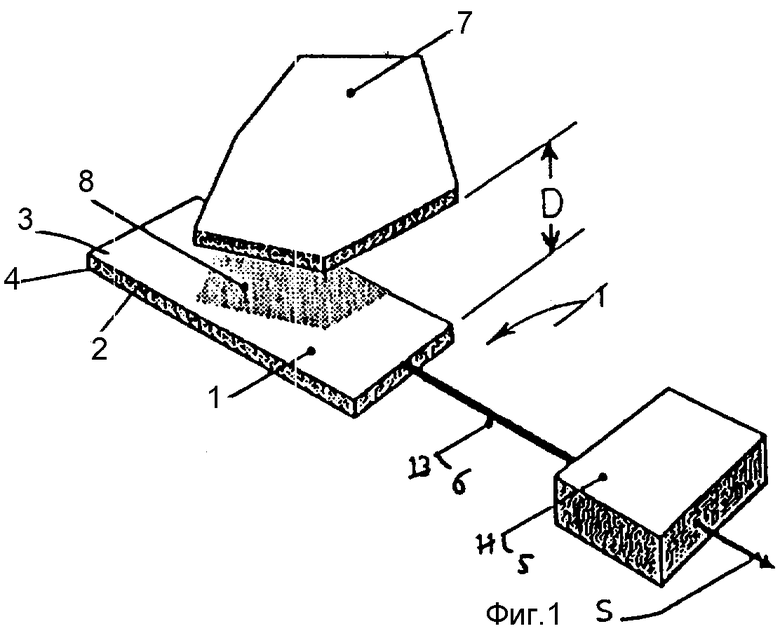
| EP, 0147294, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
