Изобретение относится к динамометрии и может быть использовано для определения величины и направления динамической равнодействующей кинетической энергии, накопленной движущимся транспортным средством при воздействии на последнее внешних возмущающих сил в плане 360o плоскости дороги при изменениях режима равномерного движения транспортного средства, например, автомобиля, и торможении, ускорении, центробежных сил на поворотах, закруглениях и наклонах дорожного полотна, боковых порывов ветра, изменениях сил сцепления в пятне контакта колеса и дороги и других параметров, вызывающих рассогласование продольной оси автомобиля относительно продольной оси дороги, вызывающих необходимость корректирования ранее заданного водителем направления движения.
В процессе движения по дороге автомобиль находится в непрерывном взаимодействии с динамическими силами, действующими на него в горизонтальном и вертикальном направлениях. Возникающая при этом динамическая равнодействующая всех сил отклоняет продольную ось автомобиля от оси направления движения - продольной оси дороги, что вынуждает водителя непрерывно корректировать рассогласование этих осей путем поворота рулевого колеса. При этом допускаемая по условиям безопасности движения величина рассогласования находится в прямой зависимости от ширины полосы движения и обратной - от скорости движения.
Тем не менее, современные автомобили не имеют не только приборных средств измерения допустимых пределов такого рассогласования, но даже прибора для констатации самого факта наступившего отклонения оси автомобиля от оси дороги. Эти функции возложены на природные органы водителя - преимущественно зрение и вестибулярный аппарат. Однако как качество, так и стабильность функционирования этих органов имеют широкие пределы колебаний не только в зависимости от профессиональной подготовки различных водителей, их возраста, состояния здоровья, времени суток, погодных условий и др., но и одного и того же водителя в зависимости от его психофизиологического состояния и многих других, не поддающихся учету факторов.
Величина реакции среднестатистического водителя при управлении автомобилем находится в пределах 0,4 - 1,5 с, величина реакции узлов и автомобиля в целом 0,5 - 0,7 - 1,5 с для легковых, грузовых и автобусов соответственно, тогда средний период опоздания реакции управления для водителя легкового автомобиля составит 1,2 с. За это время при скорости всего 70 - 75 км/час автомобиль пройдет 20 - 25 м и, если его курс отклонится от оси заданного движения по дороге всего на 15 - 20o и водитель, опоздав с реакцией, несвоевременно предпримет управляющее воздействие, то автомобиль не впишется не только в полосу движения (3 м), но и в ширину дорожного полотна (при общей ширине проезжей части в 7 м и обочин по 1,5 м).
Для повышения надежности управления автомобилем, а высокодинамичным в особенности, природные органы чувств водителя необходимо дополнить быстродействующими приборами электронной техники, к которым и относится данный измеритель динамики вождения средств сухопутного транспорта.
Одним из простейших и дешевых приборов, позволяющих выполнять необходимые измерения с высокой степенью точности, что подтверждает широкое использование его на протяжении веков в самих различных отраслях деятельности человека, является жидкостный уровень. В этом приборе в качестве измерительного преобразователя (датчика) использована свободная поверхность жидкости в закрытой стеклянной трубке, а показывающим устройством - положение пузырьков воздуха, такое простое взаимодействие двух сред обеспечивает, тем не менее, высокую точность измерений.
На основе взаимодействия со свободной поверхностью жидкости в последнее время разработаны самые различные виды датчиков первичной информации, в том числе и для измерения инерционных и гравитационных сил и моментов [1]. При всей простоте таких датчиков для обработки и представления снимаемой с них первичной информации также требуются сложные и дорогие устройства, что не позволяет их массовое использование на автомобилях в качестве штатных приборов.
Кроме того, известно устройство для измерения положения уровня, которое возможно использовать в качестве измерительного преобразователя свободной поверхности жидкости, а именно, ее положения под действием динамических сил на автомобиль в плоскости дороги [2].
Недостатком этого устройства является то, что измеряемая величина - изменение положения свободной поверхности жидкости относительно горизонтали под воздействием динамических нагрузок или ее уровня - только видоизменяется приемным блоком из матриц фоточувствительных элементов в электрический сигнал, достаточный для срабатывания показывающего прибора, например, стрелки миллимикровольтамперметра с 0 посредине, или светового и звукового индикаторов. Однако для фактографической записи сигнал необходимо подать на вход записывающего устройства типа осциллографа с бумажной лентой, сложность и стоимость которого исключают возможность использования его на автомобилях в качестве штатного измеряющего прибора.
Наиболее близким по технической сущности и достигаемому результату и изобретению средством того же назначения является устройство для измерения результирующей аэродинамических сил действующих на автомобильное транспортное средство с индикатором [3]. Технический результат, на достижение которого направлено изобретение, измерение величины и направления равнодействующей всех динамических сил с одновременным фиксированием этих значений на фактографическом документе - круговой фоточувствительной диаграмме.
Указанный результат достигается тем, что в измеритель динамики вождения средств сухопутного транспорта с индикатором введены заполненный рабочей жидкостью корпус со сферическим днищем из немагнитного материала, под которым размещен постоянный магнит с винтом, размещенные в корпусе источник света, плавающий дешифрующий блок с вогнутым зеркалом и с винтом регулирования его расстояния от источника света, приемный блок фоточувствительных матриц, соединенный с индикатором, при этом фоточувствительные матрицы собраны в отдельные блоки, размещенные на консолях приемного блока через 90o, соответственно для измерения величин замедления, ускорения, левого виража и правого виража, а приемный блок фоточувствительных матриц содержит размещенные за консолями кольцевую масштабную сетку и сменные светофильтр и фоточувствительную круговую диаграмму для одновременной с индикатором фактографической записи величины динамической равнодействующей соответственно замедления, ускорения, левого виража и правого виража в плане 360o плоскости дороги и продольной оси средства сухопутного транспорта.
Измеритель представлен на чертеже, где 1 - основание; 2 - постоянный магнит с регулятором расстояния от корпуса (винтом); 3 - корпус; 4 - плавающий дешифрующий блок - вестибулятор; 5 - рабочая жидкость; 6 - вогнутое зеркало с регулятором расстояния от источника освещения (винтом); 7, 12 - блоки фоточувствительных матриц с консолями крепления; 8 - крышка; 9 - фоточувствительная съемная круговая диаграмма; 10 - сменный светофильтр; 11 - кольцевая масштабная сетка; 13 - источник освещения (электролампа); 14 - рефлектор; 15 шар - стабилизатор; 16 - опоры корпуса.
Измеритель устанавливается на полу кузова легкового автомобиля, автобуса или в кабине грузового автомобиля, по стрелке на крышке 8 продольная ось измерительного блока совмещается с продольной осью транспортного средства (автомобиля).
Электрические выводы измерителя по однопроводной схеме (принятой в автомобилях) соединяются с панелью приборов, световыми и звуковыми (дублирующими) индикаторами измерителя и бортовым источником питания его источника освещения. Крышка 8 измерителя открывается и на светофильтр 10 накладывается свежая фоточувствительная диаграмма 9, крышка 8 закрывается и измеритель готов к работе.
При воздействии на автомобиль внешних возмущающих сил: ускорения, замедления, центробежных сил на поворотах и закруглениях дороги, свободная поверхность рабочей жидкости 5 (ее уровень) отклоняется от горизонтального положения, занимаемого при установившемся равномерном движении уровня на стенке корпуса 3, и ее месторасположение в плане 360o соответствует величине, но обратное по направлению равнодействующей всех динамических сил, действующих в данный момент времени относительно продольной оси автомобиля в плоскости дороги.
Одновременно вестибулятор 4 с вогнутым зеркалом 6 и стабилизатором 15, увлекаемый движением верхнего слоя рабочей жидкости 5, отклонится от ранее занимаемого вертикального положения, одновременно зеркало 6 отклонится от горизонтального положения на некоторый угол, а отражаемый им луч света от электролампы 13 с рефлектором 14 примет соответствующее направление в плане 360o.
При отклонении светового луча зеркалом 6 от вертикального положения равномерность освещения блоков фоточувствительных матриц 7 - 12 будет изменяться, за этим последует разбаланс их мостового соединения по 180o в плане, а стрелка показывающего прибора (на схеме не показан) с 0 посредине, отклонится от положения 0 влево или вправо в зависимости от направления отраженного луча света под воздействием равнодействующей силы, отличающеюся от направления продольной оси автомобиля в плоскости дороги. Вместо или совместно со стрелочными приборами в измерителе могут использоваться в качестве приемников информации и устройств ее отображения световые и звуковые индикаторы пороговых значений величины и направления динамической равнодействующей относительно осей автомобиля, дороги и заданного водителем направления движения.
Одновременно с освещением блоков фоточувствительных матриц, конструктивно находящихся ближе к отражающей поверхности зеркала 6 и поэтому освещаемых световым "зайчиком" большего диаметра, отраженный луч проходит кольцевую масштабную сетку 11 динамических сил и через сменный светофильтр 10 "зайчиком" возможно меньшего диаметра, достигаемого при установочной регулировке зеркала 6, облучает фоточувствительную съемную круговую диаграмму 9, оставляя на ней пятно засветки преимущественных направлении действия и достигаемой по масштабной сетке величины динамической равнодействующей в плане 360o плоскости дороги и продольной оси автомобиля в процессе его ускорения, торможения, левых и правых виражей при движении по дороге в заданном водителем направлении.
В зависимости от используемых материалов при изготовлении фоточувствительной круговой диаграммы пятно засветки проступает сразу после ее вынимания из измерителя или после несложного процесса проявления.
При прекращении действия равнодействующей динамической силы уровень жидкости 5 и вестибулятор 4 с зеркалом 6 под воздействием выталкивающей силы жидкости и магнитной связи постоянного магнита 2 со стальным шаром-стабилизатором 15 возвращаются в горизонтальное положение, соответствующее движению автомобиля с постоянной скоростью. В таком положении отражаемый вертикально зеркалом 6 луч света от источника 13 не выходит за пределы, ограничиваемые рефлектором 14, а возможные отклонения не выходят за пределы зоны нечувствительности и "шумового фона" измерителя. В таком положении луч измерителя находится все время равномерного движения автомобиля с постоянной скоростью.
При появлении возмущающей равномерное движение силы - торможения, ускорения, поворотов, заноса на скользком участке дороги, воздействия боковой силы порыва ветра и др., появляющаяся динамическая равнодействующая сила отклоняет уровень рабочей жидкости от горизонтального положения, а световой луч - от вертикального, и измеритель выполняет свою функцию измерения величины и направления этой силы в плане 360o с одновременной фактографической регистрацией ее на круговой диаграмме.
Своевременная информация о направлении действия и величине равнодействующей силы (силы инерции) имеет первостепенное значение для надежного управления движением автомобиля в плоскости дороги, особенно при высоких скоростях движения (100 - 150 км/ч), когда от водителя требуется максимальное снижение времени психомоторной реакции для своевременного выполнения управляющих воздействий.
Источники информации:
1. Горенштейн И. А. "Гидростатические частотные датчики первичной информации". Москва, "Машиностроение", 1976.
2. SU авторское свидетельство, 1673853, кл. G 01 F 23/00, 1991.
3. EP, патент, 0315497, кл. G 01 M 17/00, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДИНАМИЧЕСКИХ ВЕКТОРОВ ВЗАИМОДЕЙСТВИЯ ПНЕВМОКОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ С ПОКРЫТИЕМ АВТОДОРОГ В ЭЛЕКТРИЧЕСКИЕ ВЕЛИЧИНЫ (КАМЕРТОН БЕЗОПАСНОЙ СКОРОСТИ АВТОВОЖДЕНИЯ РАХУБОВСКОГО) | 2004 |
|
RU2270432C1 |
| ДИСКОВЫЙ КОЛЕСНЫЙ ТОРМОЗНОЙ МЕХАНИЗМ | 1992 |
|
RU2045427C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ПНЕВМАТИЧЕСКОЙ ШИНЫ | 1992 |
|
RU2042936C1 |
| Вариатор торможения по фактическому сцеплению колеса и дороги | 1991 |
|
SU1794124A3 |
| ИЗМЕРИТЕЛЬ СЦЕПНЫХ КАЧЕСТВ ДОРОЖНОГО ПОКРЫТИЯ И ПНЕВМОКОЛЕСА В ЗОНЕ КОНТАКТА ПРИ ИЗМЕНЯЕМЫХ СКОРОСТИ ДВИЖЕНИЯ И УДЕЛЬНЫХ ДАВЛЕНИЙ НА ПОВЕРХНОСТЬ | 2005 |
|
RU2296979C1 |
| Устройство для измерения положения уровня | 1989 |
|
SU1673853A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ КОЛЛОИДОВ И ЗОЛЕЙ, ИХ МАССОВОЙ СОСТАВЛЯЮЩЕЙ В ПОЛНОМ ПОТОКЕ ОТРАБОТАННЫХ ГАЗОВ В ПРЕДЕЛАХ ДИНАМИЧЕСКОГО ДИАПАЗОНА ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ (ДВС) | 2010 |
|
RU2450259C1 |
| Устройство для оценки сцепных качеств дорожных покрытий | 1990 |
|
SU1730327A1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
Использование: в силоизмерительной технике для определения величины сил ускорения - замедления транспортного средства и направления динамической равнодействующей кинетической энергии его в плане 360o плоскости дороги. Сущность изобретения: измеритель динамики вождения средств сухопутного транспорта содержит заполненный рабочей жидкостью корпус со сферическим днищем из немагнитного материалы, под которым размещен постоянный магнит с винтом, размещенные в корпусе источник света, плавающий дешифрующий блок с вогнутым зеркалом и с винтом регулирования его расстояния от источника света и приемный блок фоточувствительных матриц, соединенный с индикатором. Фоточувствительные матрицы собраны в отдельные блоки, размещенные на консолях приемного блока через 90o соответственно для измерения величин замедления, ускорения, левого виража и правого виража, а приемный блок фоточувствительных матриц содержит размещенные за консолями кольцевую масштабную сетку и сменные светофильтр и фоточувствительную круговую диаграмму для одновременной с индикатором фактографической записи величины динамической равнодействующей соответственно замедления, ускорения, левого виража и правого виража в плане 360o плоскости дороги и продольной оси средства сухопутного транспорта. 1 ил.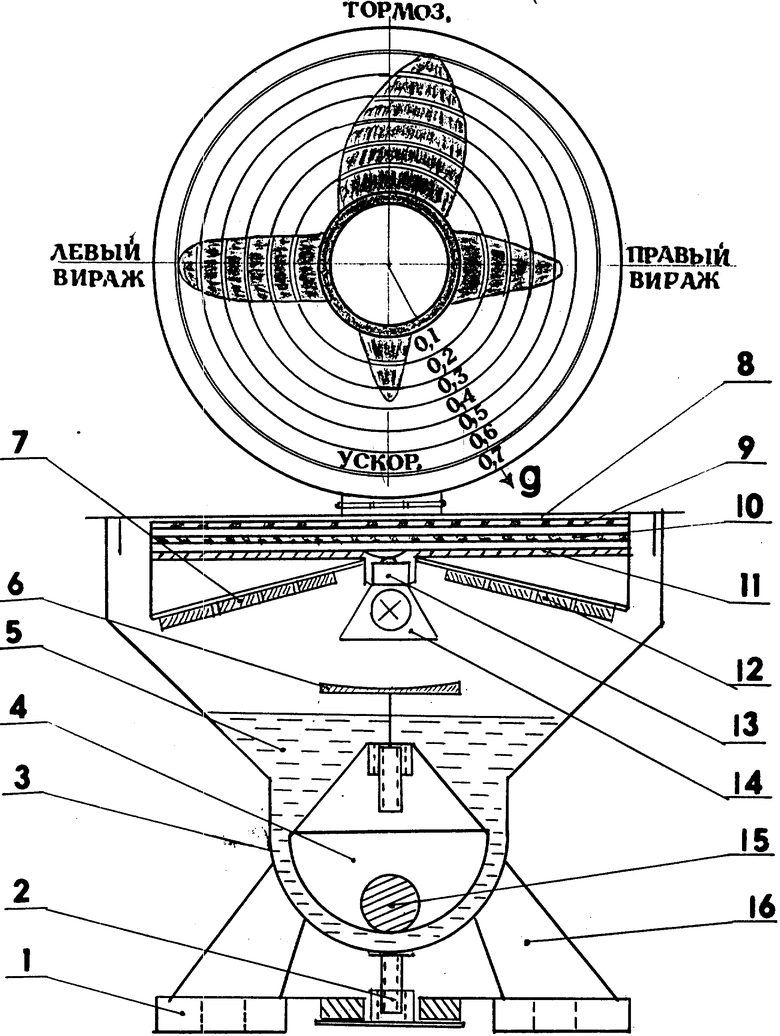
Измеритель динамики вождения средств сухопутного транспорта с индикатором, отличающийся тем, что в него введены заполненный рабочей жидкостью корпус со сферическим днищем из немагнитного материала, под которым размещен постоянный магнит с винтом, размещенные в корпусе источник света, плавающий дешифрующий блок с шаром-стабилизатором и с вогнутым зеркалом с винтом регулирования его расстояния от источника света, приемный блок фоточувствительных матриц, соединенный с индикатором, при этом фоточувствительные матрицы собраны в отдельные блоки, размещенные на консолях приемного блока через 90o, соответственно для измерения величин замедления, ускорения, левого виража и правого виража, а приемный блок фоточувствительных матриц содержит размещенные за консолями кольцевую масштабную сетку и сменные светофильтр и фоточувствительную круговую диаграмму для одновременной с индикатором фактографической записи величины динамической равнодействующей соответственно замедления, ускорения, левого виража и правого виража в плане 360o плоскости дороги и продольной оси средства сухопутного транспорта.
| SU, авторское свидетельство, 1673853, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, патент, 0315497, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
