Область техники, к которой относится изобретение
Изобретение относится к автомобилестроению, в частности к способам активной безопасности транспортных средств (ТС), а именно автопоездов, состоящих из автомобиля и прицепа, реализующих функции определения угловой скорости дополнительного рыскания колес автомобиля и прицепа в составе автопоезда и управления тормозами автомобиля и прицепа для стабилизации угловой скорости дополнительного рыскания их колес на нулевом уровне, что способствует устранению опрокидывания.
Уровень техники
Известны способ и устройство для его осуществления, служащие для контроля за поворотом транспортного средства, имеющего по меньшей мере одно колесо, которое включает в себя, по меньшей мере, одно сенсорное устройство, установленное в колесе, которое обнаруживает по меньшей мере одну переменную колеса во время поворота ТС и выдает сигнал, представляющий по меньшей мере одну переменную колеса, и дополнительно включает в себя оценочное устройство, которое обрабатывает по меньшей мере один сигнал и определяющее по меньшей мере, одно предельное значение угла поворота в соответствии с результатом обработки. Сенсорное устройство представляет собой датчик силы колеса, которое обнаруживает, по меньшей мере, одну составляющую силы колеса, действующую, по существу, между поверхностью дороги и зоной контакта колеса (см. опубликованную заявку США №US 2003093208 А1, заявители HESSMERT ULRICH, BRACHERT JOST, SAUTER THOMAS, WANDEL HELMUT, POLZIN NORBERT, опубл. 15.05.2003).
Недостатками способа и системы являются необходимость оснащения колеса дополнительным датчиком силы в зоне контакта колеса с поверхностью дороги, что ограничивает область применения способа и системы, а также отсутствие у них решения задачи определения угловой скорости дополнительного рыскания колес автопоезда, которое необходимо для предотвращения опасных состояний ТС, то есть предотвращения опрокидывания прицепа автопоезда, и по этой причине задачи предотвращения опрокидывания автопоезда в целом.
Известны способ и система прогнозирования устойчивости рыскания ТС, включающего в себя следующие этапы: начало моделирования, начиная с измеренного состояния ТС в данный конкретный момент времени; получение информации о предстоящей поездке в течение заранее определенного периода времени; моделирование движения ТС по будущему пути в течение предопределенного периода времени; вычисление одного или нескольких индикаторов прогнозируемой устойчивости рыскания ТС во время имитируемого движения вдоль будущего пути в течение предопределенного периода времени; оценку расчетных показателей для определения того, потеряет ли ТС контроль; и, если будет установлено, что ТС потеряет контроль, происходит сигнализирование об этом системе устойчивости бортовой системы рыскания (см. патент Европейского патентного ведомства № ЕР 2261093 А1, заявители: FORD GLOBAL TECHNOLOGIES, LLC и VOLVO CAR CORPORATION, опубл. 15.12.2010).
Недостатками способа и системы являются необходимость накопления, хранения и использования дополнительной информации для моделирования пути вдоль будущей траектории движения ТС, что сопровождается усложнением системы, а также отсутствие у них решения задачи определения угловой скорости дополнительного рыскания колес автопоезда и предотвращения опрокидывания прицепа автопоезда и по этой причине -задачи предотвращения опрокидывания автопоезда в целом, состоящего из автомобиля и прицепа.
Известны способ и устройство стабилизации угла поворота ТС, основанные на использовании по меньшей мере одной управляемой передней оси и/или дополнительной оси с автоматически изменяемым углом поворота. Дополнительная стабилизация движения ТС достигается путем регулировки измененного угла поворота управляемой передней оси и/или дополнительной оси учитывая наклон ТС, распознаваемого через устройство контроля наклона, при превышении предельного наклона, в дополнение к этому, определяется величина замедления ТС для уменьшения этой тенденции наклона. Такие действия противодействуют заносу или сносу ТС. Помимо этого, дополнительная стабилизация движения достигается путем определения направления движения в точке контакта с колесом основной оси колеса дополнительной оси на управляемой дополнительной оси относительно продольной оси ТС и регулировки угла поворота управляемой дополнительной оси на ней для уменьшения угла дрейфа колеса дополнительной оси относительно его направления движения (см. патент США № US 9187121 В2, заявители GERECKE MARC; KOPPER HEIKO; MICHAELSEN ARNE; WABCO GMBH, опубл. 17.11.2015).
Недостатками способа и устройства являются то, что автоматическое управление углом поворота управляемой передней или дополнительной оси производится без учета окружающей обстановки, что создает предпосылки к столкновениям с препятствиями, а также отсутствие у них решения задачи определения угловой скорости дополнительного рыскания колес автопоезда, состоящего из автомобиля и прицепа, а также отсутствие у них решения задачи поддержания угловой скорости дополнительного рыскания колес прицепа на нулевом уровне, то есть предотвращения опрокидывания прицепа автопоезда и по этой причине - задачи предотвращения опрокидывания автопоезда в целом.
Известен способ, в котором регистрируют импульсы от датчиков частот вращения колес и подают их на вход блока обработки информации. По значениям частот вращения колес определяют в реальном времени значения физических переменных, характеризующих состояние автомобиля, и граничные значения физических переменных. На выходе блока обработки информации формируют сигнал с информацией о приближении физических переменных, характеризующих состояние автомобиля, к граничным значениям или их превышении. В зависимости от значений физических переменных и граничных значений физических переменных, характеризующих состояние автомобиля, формируют сигнал с управляющим действием, предотвращающим столкновения автомобиля с препятствиями (см. Патент РФ № RU 2335805 С1, заявители БУЗНИКОВ СЕРГЕЙ ЕВГЕНЬЕВИЧ и ЕЛКИН ДМИТРИЙ СЕРГЕЕВИЧ, опубл. 10.10.2008).
Недостатками данной системы являются недостаточно широкий вектор измеряемых координат состояния автомобиля, и, в частности, угловой скорости дополнительного рыскания колес, а также отсутствие у них решения задачи стабилизации угловой скорости дополнительного рыскания колес прицепа на нулевом уровне, то есть предотвращения опрокидывания прицепа автопоезда и по этой причине - задачи предотвращения опрокидывания автопоезда в целом, а также в число оцениваемых переменных не входят переменные, характерные для автопоездов, необходимые для предотвращения возникновения опасных состояний автомобиля и прицепа.
Более близким по технической сущности является устройство оценки позиции и угла пространственной ориентации транспортного средства. Устройство задает текущий диапазон распределения частиц как предварительно определенный диапазон с помощью фильтра. А также рассеивает частицы в заданном текущем диапазоне распределения, чтобы оценивать позицию и угол пространственной ориентации ТС с помощью изображения. Камера смонтирована на ТС. Транспортное средство имеет передние колеса и задние колеса, перемещается в направлении спереди назад и выполняет поворот в направлении ширины ТС. Устройство также содержит модуль определения скорости ТС и модуль задания текущего диапазона распределения частиц. Модуль задания текущего диапазона распределения частиц выполнен с возможностью расширения текущего диапазона распределения, когда скорость ТС становится высокой. Достигается повышение точности оценки позиции и угла пространственной ориентации ТС (см. Патент РФ №RU 2626424 С1, заявитель НИССАН МОТОР КО., ЛТД., опубл. 27.07.2017).
Недостатком данного способа является сложность технической реализации программно-аппаратных средств для расчета параметров движения автомобиля методами визуальной одометрии и ограниченные возможности видеокамеры при работе в условиях темноты, осадков, тумана, пылевых бурь и т.д., что затрудняет практическое использование в реальных условиях эксплуатации транспортных средств, в особенности применимо к автопоездам.
Наиболее близким по технической сущности является способ определения угловой скорости дополнительного рыскания колес автомобиля, принятый за прототип настоящего предложения, при котором регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту автомобиля, формируемые импульсными датчиками сигналы о частотах вращения колес автомобиля, передают их через линии сопряжения в блок обработки информации системы помощи водителю автомобиля, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес автомобиля и скорости их изменения вычисляют продольную скорость движения центра масс автомобиля, средний угол поворота управляемых колес автомобиля, а также на основании сигналов о частотах вращения колес автомобиля и настроечных параметров с помощью микроконтроллера с программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости заноса задних колес автомобиля и/или сноса передних колес автомобиля, определяя таким образом значения физических переменных движения автомобиля и формируют управляющие сигналы, передаваемые на устройство вывода графической информации водителю одиночного автомобиля и/или индикаторы опасных состояний для передачи водителю информации о физических параметрах, характеризующих состояние автомобиля, а также о приближении или превышении граничных значений скоростей дополнительного рыскания колес автомобиля, в этом случае дополнительно активируют по крайней мере одно средство индикации опасных состояний для привлечения внимания водителя одиночного автомобиля (см. Патент на изобретение №RU 2717121 С2 РФ. Способ определения угловой скорости дрифта колес автомобиля, авторы Бузников С.Е., Елкин Д. С, Шабанов Н. С, Струков В. О. заявитель Федеральное государственное унитарное предприятие "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ"), опубл. 18.03.2020, Роспатент, 2020).
Недостатком и данного способа является отсутствие решения задачи определения угловой скорости дополнительного рыскания колес прицепа автопоезда и по этой причине - предотвращения опасных состояний не только прицепа, но и автопоезда в целом, путем исключения опрокидывания составных частей автопоезда.
Раскрытие сущности изобретения
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в снижении энергозатрат, стоимости производства и затрат на эксплуатацию системы, реализующей последовательность действий способа и повышении надежности, путем предотвращении сноса или заноса колес составных частей и опрокидывания автопоезда в целом, состоящего из автомобиля и, по меньшей мере, одного прицепа с помощью системы помощи водителю при реализации в ней функций определения угловой скорости дополнительного рыскания колес автопоезда в составе автомобиля и прицепа и управления тормозами автомобиля и прицепа, в том числе путем выполнения косвенных измерений, прогнозирования и предотвращения дополнительного рыскания колес автомобиля и прицепа автопоезда, обеспечивающих достижение стабилизации угловой скорости поворота составных частей ТС и отсутствие дополнительного рыскания их колес и предпосылок к перевороту.
Поставленная техническая задача решается тем, что в способе определения угловой скорости дополнительного рыскания колес автопоезда, состоящего из автомобиля и, по меньшей мере, одного прицепа, при котором в системе помощи водителю, включающей подсистему управления автомобилем, в которой, путем определения угловой скорости дополнительного рыскания колес автомобиля, регистрируют и обрабатывают сигналы о частотах вращения колес автомобиля, формируемые импульсными датчиками, по меньшей мере, одного из колес по каждому борту автомобиля,
в подсистеме автомобиля системы помощи водителю автопоезда импульсными датчиками формируют сигналы частот вращения колес автомобиля, регистрируют и передают их через линии сопряжения в блок обработки информации подсистемы помощи водителю автомобиля, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес автомобиля и скорости их изменения вычисляют продольную скорость движения центра масс автомобиля, средний угол поворота управляемых колес автомобиля, а также на основании сигналов о частотах вращения колес автомобиля и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес автомобиля и/или колес заноса задних автомобиля, определяя таким образом значения физических переменных движения автомобиля, которые сравнивают с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний автомобиля,
отличающийся тем, что
систему помощи водителю выполняют как систему помощи водителю автопоезда путем снабжения ее дополнительной подсистемой управления прицепом системы помощи водителю, в которой дополнительно регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту прицепа, формируемые импульсными датчиками сигналы о частотах вращения колес прицепа, передают их через линии сопряжения в блок обработки информации подсистемы прицепа системы помощи водителю автопоезда, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес прицепа и скорости их изменения вычисляют продольную скорость движения центра масс прицепа, средний угол поворота управляемых колес прицепа, а также на основании сигналов о частотах вращения колес прицепа и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес прицепа и/или заноса задних колес прицепа, определяя таким образом значения физических переменных движения прицепа, которые сравнивают с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний прицепа, после чего значения физических переменных движения автомобиля и прицепа из блоков обработки информации подсистем автомобиля и прицепа системы помощи водителю автопоезда передают в дополнительный вычислительный блок формирования управляющих воздействий системы помощи водителю автопоезда, в котором по значениям физических переменных движения как автомобиля, так и прицепа в случае приближения к границам критического режима возникновения дополнительного рыскания колес у автомобиля и/или у прицепа формируют управляющие воздействия на устройство вывода графической информации автопоезда для информирования водителя о приближении к границам критического режима возникновения дополнительного рыскания колес автомобиля и/или прицепа, выводят данные водителю автопоезда для управления торможением автомобиля и/или прицепа и активируют, по меньшей мере, их одно средство индикации опасных состояний для привлечения внимания водителя автопоезда, который определяет и формирует дальнейшие действия по управлению автопоездом.
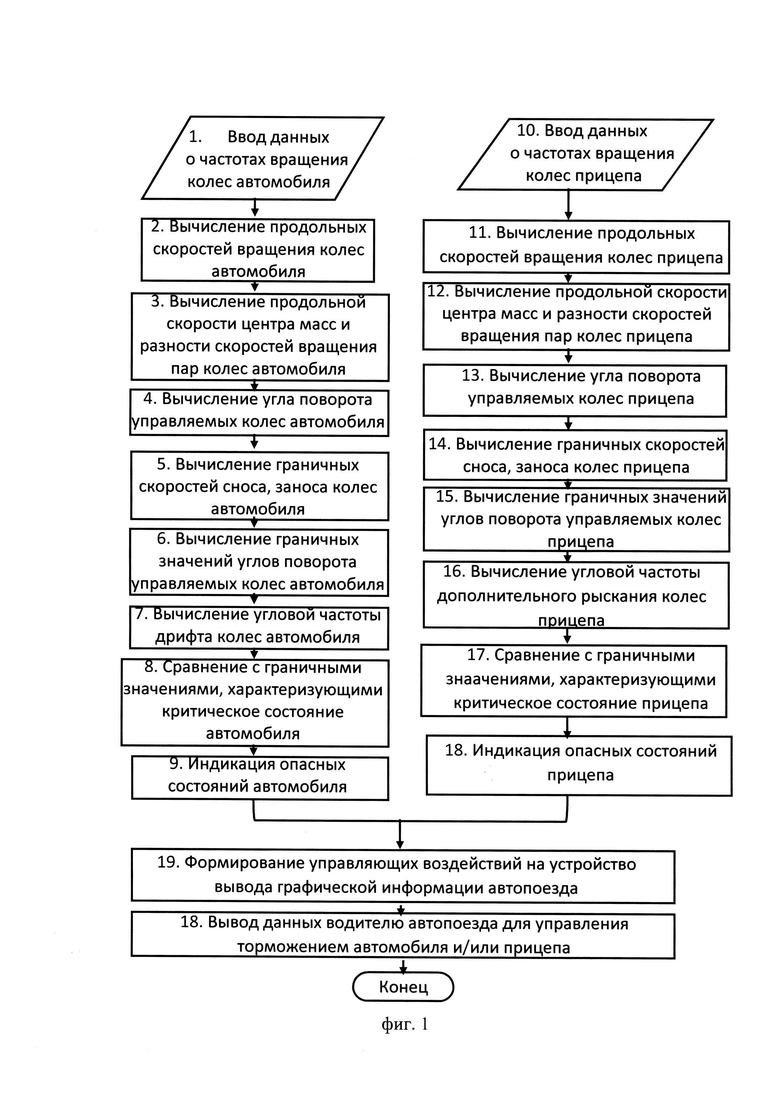
Математические вычисления по предлагаемому способу проводят с помощью микроконтроллера с соответствующим программным обеспечением, позволяющим реализовать последовательность действий способа, описанную в алгоритме, показанную на фиг.1.
Соответствующее программное для использования в микропроцессоре известно из прототипа широкому кругу пользователей и автору в том числе, по этой причине оно широко им используется в его собственной практике и не требует дополнительного подробного описания.
Технические результаты состоят в динамической стабилизации безопасной скорости автопоезда в составе автомобиля и прицепа на виражах, за счет чего предотвращается как снос передних, так и занос задних колес (то есть предотвращается дополнительное рыскание) автомобиля и/или прицепа, тем самым предотвращается предпосылка для их опрокидывания и соответственно предотвращается опрокидывание автопоезда в целом, а также - в упрощении используемых для этого средств и средств получения информации о динамическом состоянии как автомобиля, так и прицепа, и, соответственно, - в повышении надежности безопасной работы системы помощи водителю автопоезда из-за ее простоты конструкции. Упрощение ее конструкции приводит к низкой стоимости ее производства и используемых в ней технических средств, и к низкому энергопотреблению, обусловленному отсутствием дополнительного энергопитания путем введения физических энергонезависимых датчиков первичной информации, необходимых для решения поставленной задачи. Минимальная работоспособная конфигурация датчиков частот вращения колес, например, таких, как магнитноиндуктивные, достигается в случае наличия хотя бы одного датчика по каждому борту как автомобиля, так и прицепа в составе автопоезда. Предложенный способ дает возможность достоверного прогнозирования возникновения дополнительного рыскания колес как автомобиля, так и прицепа автопоезда до реального возникновения этих событий и тем самым происходит предотвращение предпосылок для опрокидывания автомобиля и/или прицепа и соответственно предотвращается опасное состояние, такое как опрокидывание автопоезда в целом.
Краткое описание чертежей
Заявленное изобретение поясняется рисунками.
На фиг.1 представлен алгоритм определения системой помощи водителю автопоезда угловой скорости дополнительного рыскания колес, входящих в состав автомобиля и прицепа.
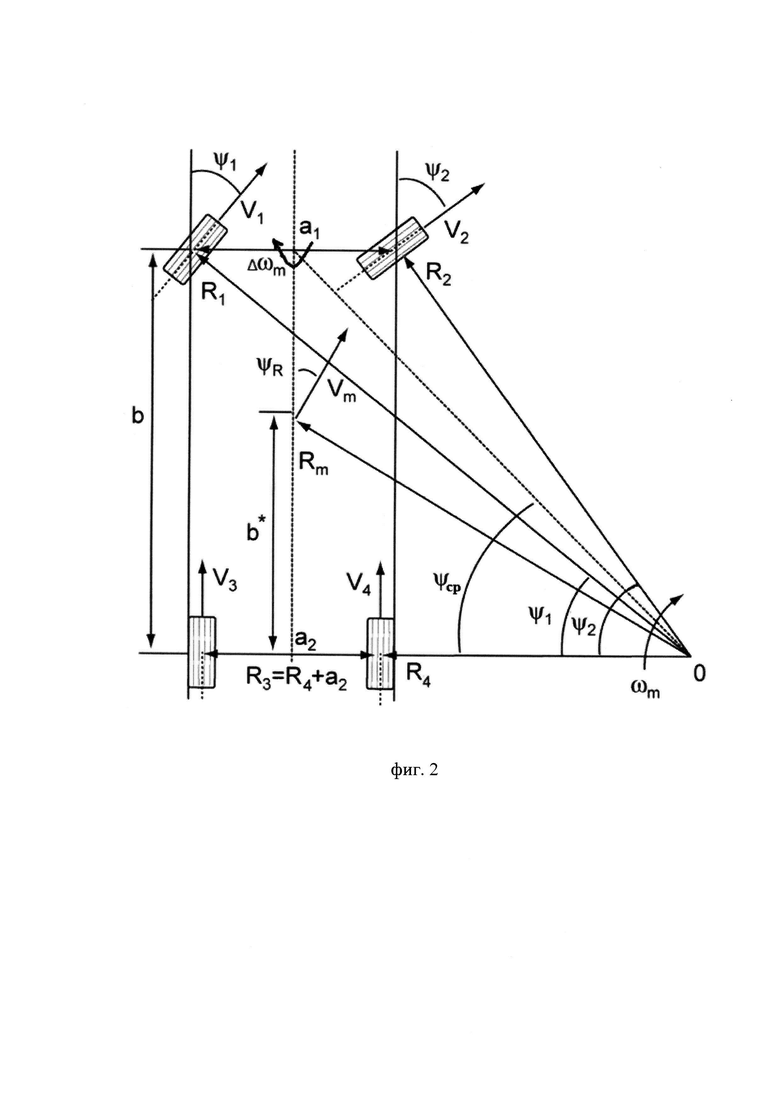
На фиг.2 представлена расчетная кинематическая схема движения как автомобиля, так и прицепа на вираже.
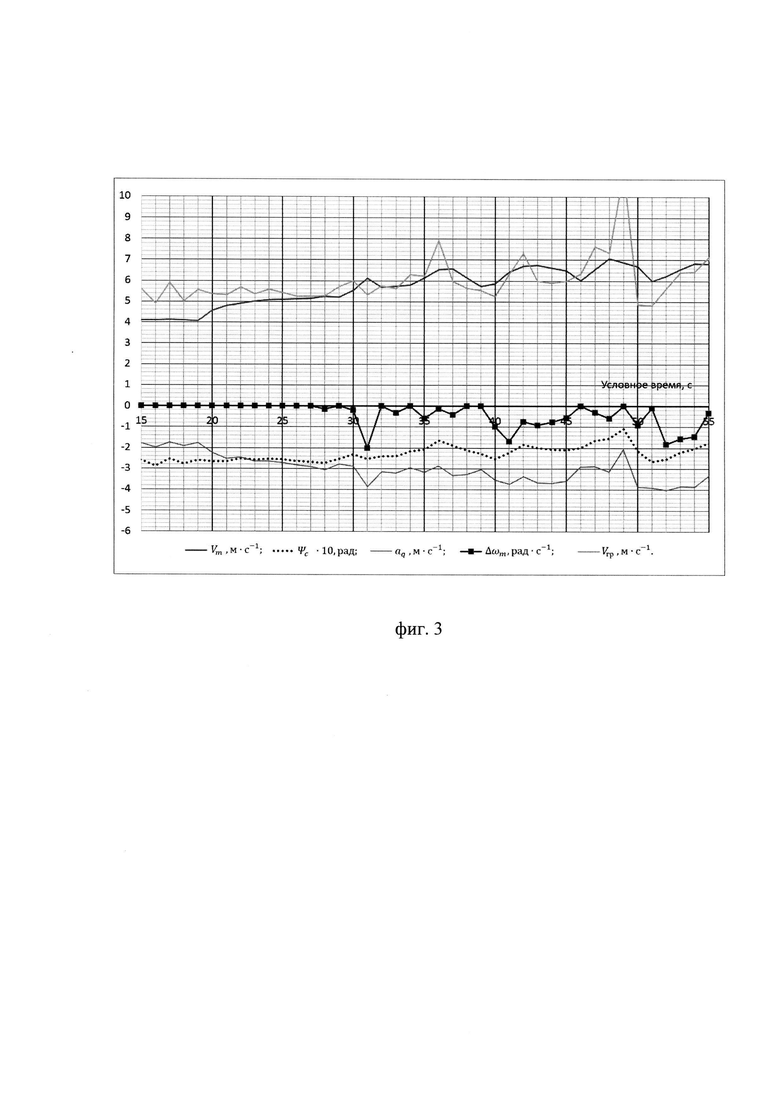
На фиг.3 представлены типичные экспериментальные временные диаграммы основных параметров автомобиля при движении на вираже.
Осуществление изобретения
На фиг.1 представлены вычислительные блоки алгоритма определения угловой скорости дополнительного рыскания колес автомобиля и прицепа, реализующие следующие действия способа:
1 - ввод данных о частотах вращения колес автомобиля;
2 - вычисление продольных скоростей вращения колес автомобиля;
3 - вычисление продольной скорости центра масс и разности скоростей вращения пар колес автомобиля;
4 - вычисление угла поворота управляемых колес автомобиля;
5 - вычисление граничных скоростей сноса, заноса колес автомобиля;
6 - вычисление граничных значений углов поворота управляемых колес автомобиля;
7 - вычисление угловой частоты дополнительного рыскания колес автомобиля;
8 - сравнение с граничными значениями, характеризующими критическое состояние автомобиля;
9 - индикация опасных состояний автомобиля;
10 - ввод данных о частотах вращения колес прицепа;
11 - вычисление продольных скоростей вращения колес прицепа;
12 - вычисление продольной скорости центра масс и разности скоростей вращения пар колес прицепа;
13 - вычисление угла поворота управляемых колес прицепа;
14 - вычисление граничных скоростей сноса, заноса колес прицепа;
15 - вычисление граничных значений углов поворота управляемых колес прицепа;
16 - вычисление угловой частоты дополнительного рыскания колес прицепа;
17 - сравнение с граничными значениями, характеризующими критическое состояние прицепа;
18 - индикация опасных состояний прицепа;
19 - формирование управляющих воздействий на устройство вывода графической информации автопоезда;
20 - вывод данных водителю автопоезда для управления торможением автомобиля и/или прицепа.
Способ определения угловой скорости дополнительного рыскания колес автопоезда, состоящего из автомобиля и, по меньшей мере, одного прицепа, при котором в системе помощи водителю, включающей подсистему управления автомобилем, в которой, путем определения угловой скорости дополнительного рыскания колес автомобиля, регистрируют и обрабатывают сигналы о частотах вращения колес автомобиля, формируемые импульсными датчиками, по меньшей мере, одного из колес по каждому борту автомобиля, осуществляется следующим образом.
В подсистеме автомобиля системы помощи водителю автопоезда импульсными датчиками формируют сигналы частот вращения колес автомобиля, регистрируют и передают их через линии и блок сопряжения в блок обработки информации.
В подсистеме автомобиля системы помощи водителю автопоезда импульсными датчиками формируют сигналы частот вращения колес автомобиля, регистрируют и передают их через линии сопряжения в блоке обработки информации подсистемы помощи водителю автомобиля системы помощи водителю автопоезда, котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес автомобиля и скорости их изменения вычисляют продольную скорость движения центра масс автомобиля, средний угол поворота управляемых колес автомобиля, а также на основании сигналов о частотах вращения колес автомобиля и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес автомобиля и/или заноса задних колес, определяя таким образом значения физических переменных движения автомобиля, которые сравнивают с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний автомобиля.
При этом систему помощи водителю выполняют как систему помощи водителю автопоезда путем снабжения ее дополнительной подсистемой управления, по меньшей мере, одним прицепом системы помощи водителю.
В свою очередь одновременно в дополнительной подсистеме каждого прицепа системы помощи водителю автопоезда дополнительно регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту прицепа, формируемые импульсными датчиками сигналы о частотах вращения колес прицепа, передают их через линии сопряжения в блок обработки информации подсистемы прицепа системы помощи водителю автопоезда, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес прицепа и скорости их изменения вычисляют продольную скорость движения центра масс прицепа, средний угол поворота управляемых колес прицепа, а также на основании сигналов о частотах вращения колес прицепа и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес прицепа и/или заноса задних колес прицепа, определяя таким образом значения физических переменных движения прицепа, которые сравнивают с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний прицепа, после чего значения физических переменных движения автомобиля и прицепа из блоков обработки информации подсистем автомобиля и прицепа системы помощи водителю автопоезда передают в дополнительный вычислительный блок формирования управляющих воздействий системы помощи водителю автопоезда, в котором по значениям физических переменных движения как автомобиля, так и прицепа, в случае приближения к границам критического режима возникновения дополнительного рыскания колес у автомобиля и/или у прицепа формируют управляющие воздействия на устройство вывода графической информации автопоезда для информирования водителя о приближении к границам критического режима возникновения дополнительного рыскания колес автомобиля и/или прицепа, выводят данные водителю автопоезда для управления торможением автомобиля и/или прицепа и активируют, по меньшей мере, их одно средство индикации опасных состояний для привлечения внимания водителя автопоезда, который определяет и формирует дальнейшие действия по управлению автопоездом..
В качестве единой математической модели косвенных измерений угловой скорости дополнительного рыскания колес, применяемой как для автомобиля, так и для каждого прицепа по отдельности используются аналогичные системы уравнений линейных скоростей вращения колес как для автомобиля, так и для прицепа
используются аналогичные системы уравнений линейных скоростей вращения колес как для автомобиля, так и для прицепа  на вираже (см. Фиг. 2):
на вираже (см. Фиг. 2):

где  - угловая скорость дополнительного рыскания колес автомобиля или прицепа;
- угловая скорость дополнительного рыскания колес автомобиля или прицепа;
 - скорость продольного скольжения i-ro колеса автомобиля или прицепа
- скорость продольного скольжения i-ro колеса автомобиля или прицепа 
На фиг.2 приняты следующие обозначения:
 - колесная база как автомобиля, так и прицепа;
- колесная база как автомобиля, так и прицепа;
 - углы поворота соответственно 1-го и 2-го управляемых колес как автомобиля, так и прицепа;
- углы поворота соответственно 1-го и 2-го управляемых колес как автомобиля, так и прицепа;
 - средний угол поворота управляемых колес как автомобиля, так и прицепа;
- средний угол поворота управляемых колес как автомобиля, так и прицепа;
 - размеры колеи передних и задних колес как автомобиля, так и прицепа;
- размеры колеи передних и задних колес как автомобиля, так и прицепа;
 - линейная скорость вращения 1-го колеса как автомобиля, так и прицепа
- линейная скорость вращения 1-го колеса как автомобиля, так и прицепа 
 - радиусы поворота соответствующих колес как автомобиля, так и прицепа;
- радиусы поворота соответствующих колес как автомобиля, так и прицепа;
 - радиус поворота продольного движения центра масс как автомобиля, так и прицепа;
- радиус поворота продольного движения центра масс как автомобиля, так и прицепа;
 - линейная скорость продольного движения центра масс как автомобиля, так и прицепа;
- линейная скорость продольного движения центра масс как автомобиля, так и прицепа;
 - угол рысканья как автомобиля, так и прицепа;
- угол рысканья как автомобиля, так и прицепа;
 - расстояние от центра масс до задней оси как автомобиля, так и прицепа;
- расстояние от центра масс до задней оси как автомобиля, так и прицепа;
 - угловая скорость вращения центра масс как автомобиля, так и прицепа на вираже при движении без дополнительного рыскания их колес.
- угловая скорость вращения центра масс как автомобиля, так и прицепа на вираже при движении без дополнительного рыскания их колес.
Дифференциальное уравнение курсового угла как автомобиля, так и прицепа  записывается в виде:
записывается в виде:

где  - скорость изменения курсового угла как автомобиля, так и прицепа.
- скорость изменения курсового угла как автомобиля, так и прицепа.
Решение (2) с учетом формулы Эйлера  в дискретном времени приводится к виду:
в дискретном времени приводится к виду:

Приращение курсового угла как автомобиля, так и прицепа  на k-ом шаге составляет:
на k-ом шаге составляет:

В случае заноса задних колес как автомобиля, так и прицепа  совпадает по знаку с
совпадает по знаку с  при
при  что приводит к увеличению модуля приращения курсового угла. В случае сноса передних колес как автомобиля, так и прицепа
что приводит к увеличению модуля приращения курсового угла. В случае сноса передних колес как автомобиля, так и прицепа  имеет противоположный знак
имеет противоположный знак  что уменьшает модуль приращения курсового угла. Дополнительное вращение (дополнительное рыскание) с частотой
что уменьшает модуль приращения курсового угла. Дополнительное вращение (дополнительное рыскание) с частотой  происходит вокруг центра оси передних колес при заносе и относительно центра задних колес при сносе как автомобиля, так и прицепа.
происходит вокруг центра оси передних колес при заносе и относительно центра задних колес при сносе как автомобиля, так и прицепа.
Причиной дополнительного рыскания колес как автомобиля, так и прицепа является превышение центробежной силы, действующей на колеса крайних, то есть передней и задней их осей, сил трения скольжения соответствующих пар колес в пятне контакта шины с покрытием в поперечном направлении.
Оценки  формируются по данным измерений частот вращения колес как автомобиля, так и прицепа
формируются по данным измерений частот вращения колес как автомобиля, так и прицепа  и настроечных данных свободных радиусов как автомобиля, так и прицепа
и настроечных данных свободных радиусов как автомобиля, так и прицепа  колес.
колес.
Решение некорректной задачи определения оценок 
 по известным оценкам
по известным оценкам  настроечным параметрам b,
настроечным параметрам b,  при
при  приведено в алгоритме определения параметров движения автомобиля.
приведено в алгоритме определения параметров движения автомобиля.
Система уравнений скоростей вращения колес как автомобиля, так и прицепа на вираже, содержит 4 уравнения с 7-ю неизвестными, а задача их определения относится к некорректным.
Для преобразования задачи к корректной, вводится группа доопределяющих условий, характеризующих свойства объекта.
Так, в частности, как для автомобиля, так и для прицепа характерно, что положительные скольжения их колес на горизонтальной поверхности возможны только при разгонах, а отрицательные только при замедлениях, что соответствует согласованности знаков 

Продольное ускорение центра масс как автомобиля, так и прицепа am ограничивается максимальными силами трения скольжения их колес, что соответствует системе ограничений:

где:
 - нижняя граница ускорения центра масс как автомобиля, так и прицепа при торможениях,
- нижняя граница ускорения центра масс как автомобиля, так и прицепа при торможениях,
 - верхняя граница ускорения центра масс как автомобиля, так и прицепа при разгонах.
- верхняя граница ускорения центра масс как автомобиля, так и прицепа при разгонах.
Величина и знак угловой частоты дополнительного рыскания колес как автомобиля, так и прицепа  зависит от соотношения центробежной силы и силы трения скольжения колес поперечного направления для колес их передней и задней осей и сводится к следующему условию:
зависит от соотношения центробежной силы и силы трения скольжения колес поперечного направления для колес их передней и задней осей и сводится к следующему условию:

где граничные скорости сноса и заноса колес как автомобиля, так и прицепа  определяются из условий равенства сил трения скольжения соответствующих передних и задних колес половине их центробежной силы:
определяются из условий равенства сил трения скольжения соответствующих передних и задних колес половине их центробежной силы:

где  - относительные распределения масс как автомобиля, так и прицепа на переднюю
- относительные распределения масс как автомобиля, так и прицепа на переднюю  и заднюю
и заднюю  оси к общей массе как автомобиля, так и прицепа m0;
оси к общей массе как автомобиля, так и прицепа m0;
 - динамический радиус колес как автомобиля, так и прицепа;
- динамический радиус колес как автомобиля, так и прицепа;
 - тягово-тормозное ускорение как автомобиля, так и прицепа;
- тягово-тормозное ускорение как автомобиля, так и прицепа;
 - значение коэффициента трения скольжения колес как автомобиля, так и прицепа в поперечном направлении;
- значение коэффициента трения скольжения колес как автомобиля, так и прицепа в поперечном направлении;  - ускорение свободного падения.
- ускорение свободного падения.
Полусуммы  разных бортов как автомобиля, так и прицепа в соответствии с (1) составляют:
разных бортов как автомобиля, так и прицепа в соответствии с (1) составляют:

Введем понятие ошибки на k-ом шаге вычислений:

Учитывая, что  получим
получим

С учетом 1 -го доопределяющего свойства как автомобиля, так и прицепа (5), получим, что модуль суммы слагаемых равен сумме модулей при условии одинаковых знаков слагаемых.
Следовательно, 
Минимизация  на множестве четырех пар колес разных бортов как автомобиля, так и прицепа позволяет определить индексы колес их пары
на множестве четырех пар колес разных бортов как автомобиля, так и прицепа позволяет определить индексы колес их пары  для которой модуль суммы скоростей продольных скольжений их колес является минимальным из числа возможных.
для которой модуль суммы скоростей продольных скольжений их колес является минимальным из числа возможных.
Оценка скорости центра масс вычисляется по формуле:

Если оценка продольного ускорения как автомобиля, так и прицепа 
удовлетворяет ограничениям 2-го доопределяющего условия (6), то оценки продольных скорости и ускорения центра масс как автомобиля, так и прицепа принимаются равными 
В противном случае, оценки продольного ускорения принимаются равными граничным и величина  как автомобиля, так и прицепа вычисляется по уравнениям модели движения.
как автомобиля, так и прицепа вычисляется по уравнениям модели движения.
В общем случае, оценка скорости центра масс как автомобиля, так и прицепа равна:

Для пары колес разных бортов как автомобиля, так и прицепа разница  равна:
равна:

Значение среднего угла поворота управляемых колес как автомобиля, так и прицепа  определяется из уравнения (11) в виде:
определяется из уравнения (11) в виде:

Величины скоростей продольных скольжений как автомобиля, так и прицепа колес  и угловой частоты их дополнительного рыскания
и угловой частоты их дополнительного рыскания  не доступны для измерений, поэтому для определения угла как автомобиля, так и прицепа
не доступны для измерений, поэтому для определения угла как автомобиля, так и прицепа  используется его оценка, содержащая первое слагаемое правой части уравнения (12), а именно
используется его оценка, содержащая первое слагаемое правой части уравнения (12), а именно 
Сопоставление уравнения оценки  и уравнения (12) для
и уравнения (12) для  позволяет представить оценку
позволяет представить оценку  в виде:
в виде:

При условии равенства скоростей продольных скольжений колес как автомобиля, так и прицепа  получим, что:
получим, что:

Тогда решение уравнения (14) относительно  запишется в виде:
запишется в виде:

Однако, собственное значение  как автомобиля, так и прицепа является неизвестным и для его оценки используется граничное значение среднего угла поворота управляемых колес для случая
как автомобиля, так и прицепа является неизвестным и для его оценки используется граничное значение среднего угла поворота управляемых колес для случая  где
где  используется замена
используется замена 
Соответственно, модули граничных значений средних углов поворота управляемых колес как автомобиля, так и прицепа, превышение которых сопровождается сносом и/или заносом их колес, определяются из (8) в виде:

Граничные скорости как автомобиля, так и прицепа  и модули граничных углов как автомобиля, так и прицепа
и модули граничных углов как автомобиля, так и прицепа  обладают свойством:
обладают свойством:

которое следует из уравнений (8) и (16).
С учетом 3-го доопределяющего свойства (7) оценка угловой частоты дополнительного рыскания колес как автомобиля, так и прицепа определяется из уравнения (15) в виде:

Прогнозирование возникновения дополнительного рыскания колес как автомобиля, так и прицепа  выполняется путем экстраполяции граничных скоростей
выполняется путем экстраполяции граничных скоростей  на время
на время  и проверяется выполнение неравенства:
и проверяется выполнение неравенства:

где 
В случае, если неравенство (19) выполняется, активируется индикатор опасных состояний в блоке ввода и отображения информации и могут формироваться сигналы управления торможением для снижения скорости центра масс как автомобиля, так и прицепа, то есть и для снижения скорости автопоезда.
Для определения значений коэффициента трения скольжения колес как автомобиля, так и прицепа в поперечном направлении  используется
используется
свойство круга Камма:

где  - коэффициенты трения скольжения i-го колеса как автомобиля,
- коэффициенты трения скольжения i-го колеса как автомобиля,
так и прицепа в продольном и поперечным направлениях соответственно;
 - топовое (максимальное) значение коэффициента трения скольжения их i-го колеса.
- топовое (максимальное) значение коэффициента трения скольжения их i-го колеса.
Значение  как автомобиля, так и прицепа, определяемое из (20), равно:
как автомобиля, так и прицепа, определяемое из (20), равно:

Значения  как автомобиля, так и прицепа определяются в соответствии с третьим законом Ньютона из уравнения равновесия тягово-тормозных сил и сил трения скольжения: тягово-тормозная сила
как автомобиля, так и прицепа определяются в соответствии с третьим законом Ньютона из уравнения равновесия тягово-тормозных сил и сил трения скольжения: тягово-тормозная сила  уравновешивается силой трения скольжения
уравновешивается силой трения скольжения  где
где
 - нормальная составляющая динамической нагрузки на их i-oe колесо. Модуль
- нормальная составляющая динамической нагрузки на их i-oe колесо. Модуль как автомобиля, так и прицепа определяется из уравнения равновесия сил:
как автомобиля, так и прицепа определяется из уравнения равновесия сил:
При малых по модулю тягово-тормозных силах согласно (21) коэффициент трения скольжения i-го колеса как для автомобиля, так и для прицепа в поперечном направлении получаем 
Идентификация  как автомобиля, так и прицепа выполняется с использованием соответствующего известного программного обеспечения в процессе движения автомобиля. Входными данными для решения этой задачи являются измеряемые скольжения
как автомобиля, так и прицепа выполняется с использованием соответствующего известного программного обеспечения в процессе движения автомобиля. Входными данными для решения этой задачи являются измеряемые скольжения колес как автомобиля, так и прицепа и текущие значения коэффициентов трения скольжения их колес в продольном направлении
колес как автомобиля, так и прицепа и текущие значения коэффициентов трения скольжения их колес в продольном направлении 
Для шин одной модели как автомобиля, так и прицепа для однородной поверхности значения  имеют следующие величины:
имеют следующие величины:

Вычисленные таким образом значения физических переменных движения автомобиля и прицепа сравнивают с граничными значениями, характеризующими их критическое состояние, приводящее к опрокидыванию и производят индикацию опасных состояний автомобиля и прицепа.
После вычисления и сравнения физических переменных движения автомобиля и прицепа с граничными их значениями из блоков обработки информации подсистем автомобиля и прицепа системы помощи водителю автопоезда их величины передают в дополнительный вычислительный блок формирования управляющих воздействий системы помощи водителю автопоезда, в котором по значениям физических переменных движения как автомобиля, так и прицепа в случае приближения к границам критического режима возникновения дополнительного рыскания колес у автомобиля и/или у прицепа формируют управляющие воздействия на устройство вывода графической информации автопоезда для информирования водителя о приближении к границам критического режима возникновения дополнительного рыскания колес автомобиля и/или прицепа, выводят данные водителю автопоезда для управления торможением автомобиля и/или прицепа и активируют по меньшей мере одно средство индикации опасных состояний для привлечения внимания водителя автопоезда, который определяет и формирует дальнейшие действия по управлению автопоездом.
Типичные экспериментальные временные диаграммы основных параметров на примере автомобиля при движении на вираже, подтверждающие эффективную работу системы помощи водителю автопоезда по предлагаемому способу, представлены на фиг.3.
Описанная последовательность действий способа и используемое для его реализации минимальное число технических средств позволяет достичь следующих технических преимуществ над известными способами:
- возможности прогнозирования дополнительного рыскания колес автомобиля и прицепа автопоезда до возникновения этих событий;
- более низкой стоимости технических средств, обусловленной отсутствием необходимости введения дополнительных физических датчиков первичной информации при реализации предлагаемого способа, необходимых для решения задачи;
- возможности при реализации предлагаемого способа функционирования системы помощи водителю автопоезда в минимальной конфигурации датчиков частот вращения колес в случае наличия хотя бы одного датчика частоты вращения колеса по каждому борту как автомобиля, так и прицепа;
- снижения энергопотребления, обусловленного отсутствием дополнительных датчиков информации и возможности использования энергетически самодостаточных типов датчиков, например, магнитно-индукционных;
- более высокой эксплуатационной надежности, обусловленной минимальной конфигурацией используемых технических средств в системе помощи водителю автопоезда и их энергетической самодостаточностью, в частности, датчиков первичной информации частот вращения колес как автомобиля, так и прицепа;
Возможности расчетного прогнозирования измеряемых физических переменных и их динамических границ с помощью предлагаемого способа для использования данных в других системах транспортных средств, например, в системах объективного контроля, при применении их для анализа и установления причин ДТП.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде для оснащения как новых, так и находящихся в эксплуатации автопоездов, состоящих из автомобиля и прицепа, следовательно, предложение соответствует критерию изобретения «промышленная применимость».
Предложение имеет отличия от известного способа работы, следовательно, соответствует критерию изобретения «новизна».
Предложение при выполнении всех известных и новых действий способа позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию изобретения «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
Изобретение относится к способу помощи водителю автопоезда. Согласно способу определения угловой скорости дополнительного рыскания колес автопоезда регистрируют и обрабатывают сигналы колес по каждому борту как автомобиля, так и прицепа по отдельности. Формируемые сигналы о частотах вращения колес передают в блоки обработки информации подсистем автомобиля и прицепа системы помощи водителю автопоезда, в которых в режиме реального времени вычисляют продольные скорости движения их центров масс, средний угол поворота управляемых колес автомобиля и прицепа. На основании сигналов и настроечных параметров вычисляют знаки и величины угловых скоростей дополнительного рыскания как величин скоростей заноса задних колес автомобиля и прицепа и/или сноса передних колес автомобиля и прицепа, определяя значения физических переменных движения автомобиля и прицепа по отдельности, сравнивают их с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний автомобиля и прицепа по отдельности. Достигается повышение надежности путем предотвращения сноса или заноса колес и опрокидывания автопоезда. 3 ил.
Способ определения угловой скорости дополнительного рыскания колес автопоезда, состоящего из автомобиля и, по меньшей мере, одного прицепа, при котором в системе помощи водителю, включающей подсистему управления автомобилем, в которой путем определения угловой скорости дополнительного рыскания колес автомобиля регистрируют и обрабатывают сигналы о частотах вращения колес автомобиля, формируемые импульсными датчиками, по меньшей мере, одного из колес по каждому борту автомобиля, в подсистеме автомобиля системы помощи водителю автопоезда импульсными датчиками формируют сигналы частот вращения колес автомобиля, регистрируют и передают их через линии сопряжения в блок обработки информации подсистемы помощи водителю автомобиля, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес автомобиля и скорости их изменения вычисляют продольную скорость движения центра масс автомобиля, средний угол поворота управляемых колес автомобиля, а также на основании сигналов о частотах вращения колес автомобиля и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес автомобиля и/или заноса задних колес автомобиля, определяя таким образом значения физических переменных движения автомобиля, которые сравнивают с граничными значениями, характеризующими их критическое состояние, и производят индикацию опасных состояний автомобиля, отличающийся тем, что систему помощи водителю выполняют как систему помощи водителю автопоезда путем снабжения ее дополнительной подсистемой управления прицепом системы помощи водителю, в которой дополнительно регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту прицепа, формируемые импульсными датчиками сигналы о частотах вращения колес прицепа, передают их через линии сопряжения в блок обработки информации подсистемы прицепа системы помощи водителю автопоезда, в котором в режиме реального времени на основании формируемых импульсными датчиками сигналов о частотах вращения колес прицепа и скорости их изменения вычисляют продольную скорость движения центра масс прицепа, средний угол поворота управляемых колес прицепа, а также на основании сигналов о частотах вращения колес прицепа и настроечных параметров с помощью микроконтроллера с соответствующим программным обеспечением вычисляют знак и величину угловой скорости дополнительного рыскания как величину скорости сноса передних колес прицепа и/или заноса задних колес прицепа, определяя таким образом значения физических переменных движения прицепа, которые сравнивают с граничными значениями, характеризующими их критическое состояние и производят индикацию опасных состояний прицепа, после чего значения физических переменных движения автомобиля и прицепа из блоков обработки информации подсистем автомобиля и прицепа системы помощи водителю автопоезда передают в дополнительный вычислительный блок формирования управляющих воздействий системы помощи водителю автопоезда, в котором по значениям физических переменных движения как автомобиля, так и прицепа, в случае приближения к границам критического режима возникновения дополнительного рыскания колес у автомобиля и/или у прицепа формируют управляющие воздействия на устройство вывода графической информации автопоезда для информирования водителя о приближении к границам критического режима возникновения дополнительного рыскания колес автомобиля и/или прицепа, выводят данные водителю автопоезда для управления торможением автомобиля и/или прицепа и активируют, по меньшей мере, их одно средство индикации опасных состояний для привлечения внимания водителя автопоезда, который определяет и формирует дальнейшие действия по управлению автопоездом.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СПОСОБ СТАБИЛИЗАЦИИ РЕЖИМА ДВИЖЕНИЯ ГРУЗОВОГО АВТОПОЕЗДА | 2002 |
|
RU2300471C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ТОРМОЗНЫХ ДАВЛЕНИЙ ПО ОСЯМ АВТОМОБИЛЯ | 2007 |
|
RU2438892C2 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |
