Изобретение относится к приборам восприятия динамических усилий и превращение их в электрические значения, аналоговые по величине и направлению действия в горизонтальной и вертикальной плоскостях взаимодействия средств транспорта, например, автомобилей, с поверхностью покрытия автодорог, их виражей и закруглений.
Эти усилия воздействуют на устойчивость транспортного средства и его управляемость, что вынуждает водителя непрерывными воздействиями рулевого колеса удерживать, например, автомобиль в пределах коридора безопасности занимаемой полосы движения.
Отклонение от заданного направления движения по занимаемой полосе на автодороге водитель, кроме зрения, контролирует также с помощью своего вестибулярного аппарата. Однако чувствительность и функциональность природного вестибулярного аппарата человека-водителя в значительной мере зависит от его генетических качеств да еще и искажается тем, что большая часть рецепторов, подсознательно обеспечивающих человеку ощущение своего положения в пространстве при нормальном положении - опоре нижних конечностей на землю, выключены из обычного взаимодействия с другими функциональными системами взаимодействия человека, ибо автомобилем управляют в положении сидя, а ноги водителя выполняют только механические функции и не оказывают никакого влияния на координацию пространственных ощущений ни самого водителя, ни тем более на координацию управляемого им автомобиля в коридоре безопасности.
Из статистики известно, что подавляющее количество автоаварий - 75-80% - совершается по причине человеческого фактора, причем 35-40% их происходит вследствие "...выезда на полосу встречного движения или опасного маневрирования при обгоне".
Очевидно, что в условиях узких автодорог со встречным движением преимущественно в один-два ряда в одном направлении природные органы водителя, обеспечивающие ему "чувство автодороги", без которого невозможно принять и успеть выполнить в ситуационном цейтноте единственно верное и безопасное управляющее воздействие, с увеличением скоростей движения современных высокодинамичных средств транспорта, особенно автомобилей, используемых эпизодически на бытовом уровне самыми широкими слоями населения, оказались не в состоянии обеспечивать безопасность вождения, поскольку управляющие функции безопасного вождения, выполняемые профессионалами-водителями на подсознательном уровне, приобретаются только опытом каждодневного вождения не менее 4-5 часов в день на протяжении 10-15 лет.
Из приведенного следует, что "чувство дороги" для ускорения адаптации автовладельцев из всех слоев современного общества в деле безопасности автовождения необходимо дополнить и усилить с помощью приборного обеспечения, быстродействие которого синхронно реальным физическим процессам взаимодействия динамических сил в месте контакта пневматических колес с покрытием автодороги и не зависит ни от генетических качеств водителя, ни от его благоприобретенного опыта (или отсуствия такового) вождения.
В качестве прототипа принят "ИЗМЕРИТЕЛЬ ДИНАМИКИ ВОЖДЕНИЯ СРЕДСТВ СУХОПУТНОГО ТРАНСПОРТА"(патент РФ №2104511 от 25.04.1995 г.), содержащий заполненный рабочей жидкостью немагнитный корпус, осветитель, плавающий дешифрующий блок с вогнутым зеркалом, блоки фоточувствительных матриц с измерителем тока и фоточувствительную круговую диаграмму фактографической регистрации равнодействующих величин сил торможения, ускорения, боковых сил при правом или левом виражах в плоскости 360° автодороги и продольной оси сухопутного транспортного средства (автомобиля, например).
Недостатком прототипа является то, что плавающий дешифрующий блок его воспринимает и преобразовывает в электрические величины только динамические силы, которые воздействуют в горизонтальной плоскости движения транспортного средства, тогда как динамические возмущения, нарушающие устойчивость и управляемость его, возникают и в вертикальной плоскости от выбоин, кочек, волнистости покрытия, мест его проседания или выпучивания, стыков на мостах и примыканиях, не определяются и не регистрируются, тогда как их воздействие способно внезапно изменить устойчивость транспортного средства и инициировать развитие ситуации в ДТП, поскольку водитель не всегда способен своевременно воспринять как сам факт потери устойчивости и меру его опасности, так и нивелировать своими управляющими воздействиями удержание транспортного средства, например, автомобиля, в пределах коридора безопасности полосы движения.
Кроме того, вибрационные волны относительно большой свободной поверхности рабочей жидкости в корпусе прототипа вызывают также и вибрацию дешифрующего блока, результатом чего возникает "размытость" границ светового "зайчика" на поверхности светочувствительной круговой диаграммы.
Это не обеспечивает необходимую точность позиционирования вектора равнодействующей динамических сил, которые действуют в плоскости 360°, а также точности отслеживания автономной иннерциальной "привязки" продольной оси транспортного средства, например автомобиля, к линии осевой разметки полосы дороги или визуального направления прямолинейного движения, заданного управляющим воздействием водителя.
Цель изобретения - техническое обеспечение возможности превращения в электрические величины, кроме сил, действующих в горизонтальной плоскости, также и возмущающих устойчивое движение динамических сил, возникающих в вертикальной плоскости при взаимодействии транспортных средств, например автомобилей и автопоездов, с покрытием автодорог от неровностей их поверхности, ее выпуклостей или проседаний, боковых сил на поворотах и виражах, а также повышение точности позиционирования в плане 360° равнодействующего вектора сил, воздействующего на устойчивость движения транспортного средства в габаритах коридора безопасности по занимаемой полосе движения путем отклонений соосности продольной оси его от продольной оси разметки автодороги или визуальной линии прямолинейного движения, заданной управляющими действиями водителя.
Суть изобретения - эта цель достигается тем, что для повышения точности позиционирования равнодействующего вектора сил относительно продольной оси транспортного средства, например автомобиля, при динамическом взаимодействии его пневмоколес с поверхностью автодороги в горизонтальной плоскости в плане 360° и в вертикальной плоскости к поверхности автодороги в 90°, плавающий дешифрующий блок выполнен в виде многосекционной кольцевой диафрагмы из светонепроницаемых лепестков ее, причем пустотелые пуансоны лепестков диафрагмы имеют донышки и плавают в серединном слое рабочей жидкости со свободной поверхностью, которая заполняет собой круговой канал сепаратора пуансонов лепестков, источник света с рефлектором, переддиафрагменный кольцевой зеркальный отражатель света, блоки фоточувствительных матриц, размещаемых по кольцу в 360° через 90° соответственно нормального направления действия динамических сил ускорения, торможения, левого или правого поворотов или виражей относительно продольной оси автомобиля при его движении в плоскости автодороги.
Одновременно блок восприятия вертикальных сил от неровностей покрытия автодороги содержит плавающий подпружиненный стакан с кольцевым рифлением наружной поверхности, двуплечие рычаги, носители светонепроницаемых лепестков диафрагмы - пуансоны без донышек, фоточувствительные матрицы, размещенные на 45° каждого квадранта круга, при этом электровыводы от функциональных по своему назначению фоточувствительных матриц и к источнику света от бортового питания собраны в коммуникационный блок для подключения электрических информационных и регистрирующих приборов, при этом количество поступающей на эти приборы электроэнергии учитывается устройствами учета, например, кулонометрами, выражая собой, в качестве аналога, количественное значение динамических сил, воспринятых узлами и деталями средств транспорта в процессе взаимодействия их пневмоколес с поверхностью автодорог и качеством вождения водителем, что может служить объективным показателем для целей определения периодичности профилактических и ремонтных воздействий, объективной оценки профессиональных качеств водителей, а также документально подтверждаемой первопричины случившегося ДТП и ответчика по возмещению материального (или уголовного) ущерба в случае возникновения страхового события. Конструктивно преобразователь состоит (см. фиг.1):
1. - корпус из немагнитного материала;
2. - фоточувствительные матрицы;
3. - лепестки кольцевой многосекционной диафрагмы, одинарные;
4. - рефлектор;
5. - источник света;
6. - преддиафгагменный кольцевой отражатель света;
7. - рычаги (двуплечевые) квадрантных пуансонов;
8. - квадрантные пуансоны;
9. - коммуникационный блок электровыводов;
10. - кольцевой блок фоточувствительных матриц;
11. - лепестки кольцевой диафрагмы, сдвоенные;
12. - винт точной регулировки автономной иннерциальной "привязки" преобразователя к продольным осям автомобиля и дороги;
13. - крышка корпуса с уплотнителем;
14. - пуансоны лепестков кольцевой плавающей диафрагмы;
15. - сепаратор пуансонов плавающей диафрагмы;
16. - круговой канал сепаратора с рабочей жидкостью;
17. - двуплечие рычаги квадрантных пуансонов;
18. - ось-кольцо крепления двуплечих рычагов;
19. - возвратная пружина плавающего иннерционного стакана-массы;
20. - плавающий иннерционный стакан-масса с балластом;
21. - проушина крепления корпуса преобразователя в автомобиле.
Работа преобразователя - преобразователь закрепляется по продольной оси автомобиля (автопоезда) над задней осью или немного сзади, поскольку задняя ось очень чувствительна к действию внешних сил при взаимодействии ее колес с поверхностью автодороги, склонна к заносам или сносам на виражах, закруглениях, а поэтому имеет наибольшее влияние на сохранение устойчивости движения в направлении, заданном управляющими действиями водителя.
При воздействии на автомобиль внешних сил, возмущающих его устойчивое движение, от ускорений, торможений, центробежных сил на виражах и закруглениях автодорог, уровень рабочей жидкости со свободной поверхностью в канале сепаратора пуансонов 15 отклоняется от горизонтального, занимаемого им при установившемся движении с равномерной скоростью.
В этом случае наивысший уровень свободной поверхности рабочей жидкости, в соответствии с законом инерции для жидкой массы, сосредоточится в том месте кольцевого канала 16 в плоскости 360°, которое соответствует направлению равнодействующей всех динамических сил, которые действуют в данный момент времени относительно координатных осей автомобиля и дороги.
Повышение уровня свободной поверхности рабочей жидкости в каком-то секторе канала 16, в котором при движении с установившейся скоростью на одинаковой линии плавают все пуансоны 14 лепестковой диафрагмы, приводит к всплытию соответствующей группы пунсонов 14 со светонепроницаемыми лепестками кольцевой диафрагмы. Вследствие всплытия пуансонов лепестки кольцевой диафрагмы, ранее покоившиеся в закрытом положении на плоскости сепаратора 15, в этом ее секторе канала 16 приподнимаются и поток света от источника 5 и его рефлектора 4 с помощью кольцевого зеркального отражателя 6 попадает на блок фоточувствительных матриц 10 в секторе повышения уровня свободной поверхности рабочей жидкости, инициируемого усилием равнодействующей всех динамических сил, действующих в пятне контакта пневмоколес автомобиля с поверхностью покрытия автодороги в текущий отрезок времени своего движения по ней.
Возбуждение от этого потока света фоточувствительных матриц вызовет возникновение электрического тока, величина которого будет пропорциональна площади освещения фоточувствительных матриц, которая в свою очередь пропорциональна высоте поднятия лепестков кольцевой диафрагмы в данном ее секторе, которая, соответственно, пропорциональна величине динамических сил и направлению их равнодействующей, воздействующей на поднятие уровня свободной поверхности рабочей жидкости в данном секторе кольцевого канала 16 преобразователя.
Поскольку продольные оси кольцевой диафрагмы 3 и кольцевого блока фоточувствительных матриц 10 совмещены иннерциально с продольными осями автомобиля и разметки полосы его движения по автодороге, то секторы открытия лепестков плавающей кольцевой диафрагмы в плоскости 360° будут одновременно с возникновением электротока определять и направление равнодействующей всех динамическихсил сил относительно продольной оси движущегося автомобиля, которые воздействуют в данный отрезок времени на отклонение направления его движения по занимаемой полосе автодороги от прямолинейного в коридоре безопасности, заданного управляющими действиями водителя. С этой же целью блоки фоточувствительных матриц 10 размещены через 90°, фиксируя собой координаты продольной и поперечной осей автомобиля в плоскости 360° и продольной оси полосы его движения по автодороге во времени и пространстве в координатах 0°-90°-180°-270°-360°-0°.
Так как блоки фоточувствительных матриц соединены между собой способом сбалансированного мостового соединения (мостик Уотсона), то стрелка аналогового показывающего прибора с 0 посередине (например, миллимикровольт амперметра) будет отклоняться от своего равновесного нулевого положения, соответствующего координатным, в зависимости от направления равнодействующей динамических сил, изменяющих направление потока света на тот или иной сектор и блоки сбалансированных между собой фоточувствительных матриц в данный момент возмущения равномерного движения автомобиля.
Восприятие преобразователем динамических сил, которые действуют на автомобиль в вертикальной плоскости при взаимодействии его колес с неровностями покрытия автодороги, выполняет плавающий стакан-масса 20, который уравновешен в нейтральном положении пружиной 19 и собственным балластом, закрепленным внутри него, причем восприятие действующих вертикальных сил возможно только при равномерном движении с постоянной скоростью.
В этом случае низкочастотные волны вибрации свободной поверхности рабочей жидкости в колодце сепаратора пуансонов 15 представляют собой концентрические круги, действием которых плавающий стакан, наружная поверхность которого выполнена из рельефных выпуклых колец, несколько меньших по наружному диаметру от таких же колец по внутреннему диаметру колодца сепаратора 15, принимает строго вертикальное положение, а его наружные кольца выходят из кольцевых канавок внутри колодца. При этом иннерционная масса-стакан разблокируется и получает возможность перемещения в вертикальной плоскости под воздействием динамических сил, которые возмущают равномерное движение автомобиля по поверхности автодороги.
Резкие удары колес на выбоинах, кочках или волнистостях покрытия автодороги выводят стакан-массу из равновесия, импульсом его усилия преодолевается усилие возвратной пружины 19 и стакан нажимает на двуплечие рычаги 7 и 17 квадрантных пуансонов 8, которые усилием этих рычагов поднимаются с плоскости сепаратора 15 вместе с лепестками кольцевой диафрагмы, открывая потоку света возможность освещения квадрантных секторов кольцевого блока фоточувствительных матриц 10.
Поскольку квадрантные пуансоны 8 не имеют донышек, то они не реагируют на изменение уровня свободной поверхности рабочей жидкости в канале 16, происходящее под воздействием горизонтальных сил в плоскости 360°, кроме того, при всех изменениях горизонтального уровня рабочей жидкости в колодце сепаратора 15 стакан 20 отклоняется от вертикального положения и кольца его наружной поверхности входят в такие же впадины-кольца стенок колодца, что дополнительно блокирует его от возможности восприятия сил, действующих на автомобиль не в вертикальной плоскости при его движении.
Все квадрантные пуансоны одновременно поднимают лепестки секционных диафрагм, открывая потоки света к блокам фоточувствительных матриц своих квадрантов, которые соединены между собой электрически. Возникновение электротока от возбуждения фоточувствительных матриц также пропорционально площади их освещения, которая пропорциональна высоте открытия лепестков квадрантного сектора кольцевой дифрагмы, в свою очередь зависящей от величины вертикального усилия, воспринятого иннерционной массой-стаканом через колеса и элементы подвески автомобиля от поверхности покрытия автодороги.
Полезность практического использования преобразователя представляется в виде возможности визуализации и объективного измерения существующими физическими единицами - ускорения или замедления в размерности м/сек2 - безопасных режимов фаз вождения транспортных средств, в особенности автомобилей, в виде: разгона, движения с установившейся скоростью, торможения, угловой скорости руления и линейной скорости вхождения в закругления или виражи в плане автодорог, характеризующих собой мерило водительского опыта безопасного вождения, приобретаемого годами практики, причем этот опыт приобретается только самостоятельно, не служит "приложением" к должности любого индивидуума, восседающего на любой высоте общественной лестницы, не продается за любые известные ныне ценности. Все попытки "обойти" этапы при обретении личного опыта вождения только укорачивают длину пути, который суждено пройти такому "ловкачу" в жизни или к больничной койке.
Использование "Преобразователя..." позволит объективно и юридически доказательно с помощью фактографических записей параметров вождения определять профпригодность абитуриентов-автовладельцев (как это законодательно установлено для владельцев огнестрельного оружия) и сертифицировать водителей, уже имеющих "права" на предмет их безопасности в транспортных потоках для других участников дорожного движения.
Возможность измерения величины и направления результирующей (равнодействующей) силы в плоскости 360 и 90° по вертикали, воздействующей на отклонение продольной оси автомобиля от направления, заданного управляющим воздействием водителя, позволяет визуализировать пороговое значение момента бифуркации (разделения единого направления действия силы, течения потока или струи на два в непредсказуемых направлениях), при котором одно из направлений способно "взять управление на себя" как неизбежность воздействия физических законов на данном отрезке автодороги: скорости движения, коэффициента сцепления покрытия, величины радиуса закругления автодороги или угла наклона виража и др. в случае пренебрежения со стороны водителя или организаторов дорожного движения этими физическими канонами. Именно такая техническая сущность лежит в основе сотен тысяч "Протоколов о ДТП...", составляемых ежегодно автоинспекторами ГИБДД, указывающих причину автокатастрофы в виде техноюридической абракадабры: "...водитель не справился с управлением автомобиля", поскольку лишены возможности измерить количественно выражения "...справился" или "...не справился" в их физическом значении с помощью существующих физических единиц измерения.
С помощью "Измерителя..." возможно также оценивать влияние факторов автодороги в регионе эксплуатации на надежность и износ деталей и узлов средств транспорта, в особенности автомобилей, назначение периодичности профилактических и ремонтных воздействий по фактической величине динамического взаимодействия с покрытием автодорог, а также качеством вождения.
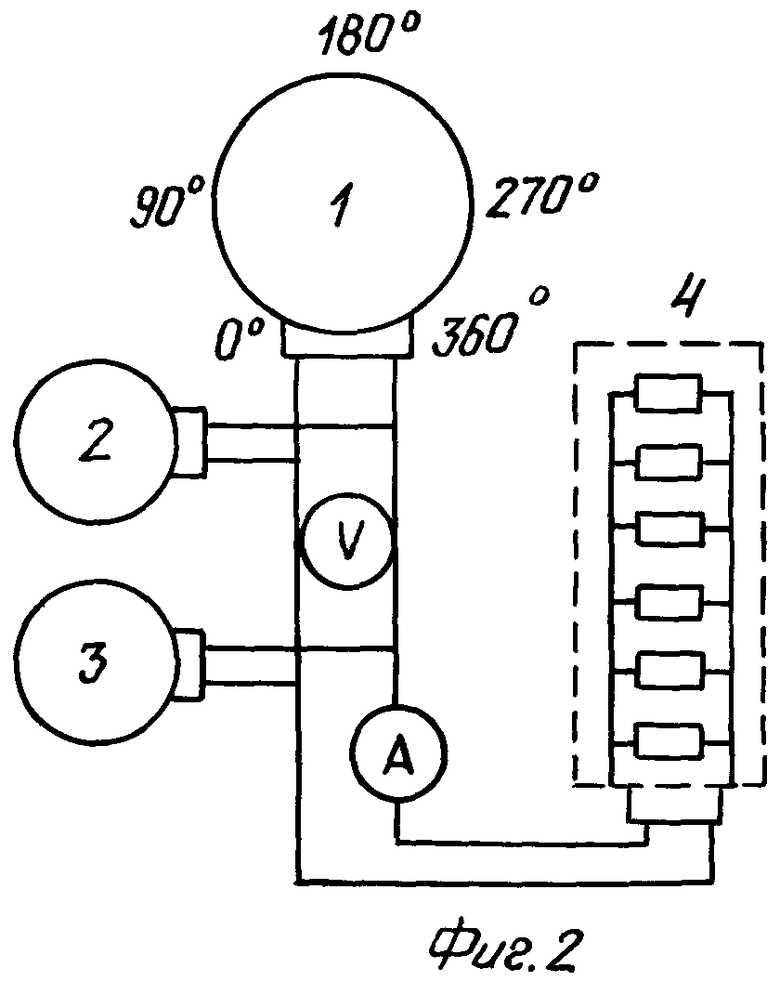
Одна из возможных компоновочных схем "Преобразователя..." с существующими электрическими приборами измерения, отображения и накопления информации приведена на фиг. 2:
1. - собственно "Преобразователь..." - интегратор динамических сил взаимодействия в плоскости и координатах движения автомобиля по поверхности автодороги и превращения их в электрические аналоги значений ускорения, замедления, боковых сил при левых-правых закруглениях или виражах, а также вертикальных ускорений при взаимодействии пневмоколес с выбоинами или кочками покрытия;
2. - блок отображения текущей информации о величине и направлении импульса равнодействующей силы относительно продольной оси автомобиля (автопоезда) и коридора безопасности его движения по занимаемой полосе автодороги при ускорении, торможении, левом-правом поворотах или виражах;
3. - блок фактографической записи текущих значений импульсов взаимодействия автомобиля с поверхностью автодороги на физических носителях информации: магнитных лентах, дисках, лазерных дисках и др.;
4. - блок накопления информации за продолжительное время (месяц, квартал, полугодие) для целей назначения периодичности профилактических и ремонтных воздействий, уровня надежности деталей и узлов, особенно обеспечивающих безопасность движения, по фактическому восприятию динамических воздействий в процессе взаимообмена таковыми пневмоколес транспортного средства с поверхностью автодорог в регионе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ДИНАМИКИ ВОЖДЕНИЯ СРЕДСТВ СУХОПУТНОГО ТРАНСПОРТА | 1995 |
|
RU2104511C1 |
| ИЗМЕРИТЕЛЬ СЦЕПНЫХ КАЧЕСТВ ДОРОЖНОГО ПОКРЫТИЯ И ПНЕВМОКОЛЕСА В ЗОНЕ КОНТАКТА ПРИ ИЗМЕНЯЕМЫХ СКОРОСТИ ДВИЖЕНИЯ И УДЕЛЬНЫХ ДАВЛЕНИЙ НА ПОВЕРХНОСТЬ | 2005 |
|
RU2296979C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ КОЛЛОИДОВ И ЗОЛЕЙ, ИХ МАССОВОЙ СОСТАВЛЯЮЩЕЙ В ПОЛНОМ ПОТОКЕ ОТРАБОТАННЫХ ГАЗОВ В ПРЕДЕЛАХ ДИНАМИЧЕСКОГО ДИАПАЗОНА ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ (ДВС) | 2010 |
|
RU2450259C1 |
| Устройство для измерения положения уровня | 1989 |
|
SU1673853A1 |
| ЛИФТ ДЛЯ ИНВАЛИДА В КОЛЯСКЕ, САМОУСТАНАВЛИВАЮЩИЙСЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ | 2004 |
|
RU2287476C2 |
| ПРИБОР ДЛЯ АНАЛИЗА КОЛЛОИДНЫХ ЖИДКОСТЕЙ И ЗОЛЕЙ | 2007 |
|
RU2336519C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ПНЕВМАТИЧЕСКОЙ ШИНЫ | 1992 |
|
RU2042936C1 |
| Вариатор торможения по фактическому сцеплению колеса и дороги | 1991 |
|
SU1794124A3 |
| ПРИБОР ДЛЯ АНАЛИЗА МОТОРНОГО МАСЛА | 1991 |
|
RU2007706C1 |
| ДИСКОВЫЙ КОЛЕСНЫЙ ТОРМОЗНОЙ МЕХАНИЗМ | 1992 |
|
RU2045427C1 |
Преобразователь содержит заполненный рабочей жидкостью со свободной поверхностью корпус из немагнитного материала, источник света, плавающий дешифрующий блок и блоки фоточувствительных матриц. Плавающий дешифрующий блок содержит: кольцевую многосекционную диафрагму из светонепроницаемых лепестков, их индивидуальные пустотелые пуансоны с донышками, плавающими в серединном слое объема рабочей жидкости со свободной поверхностью, которая заполняет собой кольцевой канал сепаратора пуансонов, источник света с рефлектором, переддиафрагменный кольцевой зеркальный отражатель света, блоки фоточувствительных матриц. Блок восприятия вертикальных ускорений содержит: плавающий стакан с возвратной пружиной, двуплечие рычаги, пуансоны светонепроницаемых лепестков диафрагмы, не имеющие донышек. Технический результат - обеспечение возможности превращения в электрические величины возмущающих устойчивое движение динамических сил, возникающих в вертикальной плоскости при взаимодействии транспортных средств с покрытием автодорог. 3 з.п. ф-лы, 2 ил.
| ИЗМЕРИТЕЛЬ ДИНАМИКИ ВОЖДЕНИЯ СРЕДСТВ СУХОПУТНОГО ТРАНСПОРТА | 1995 |
|
RU2104511C1 |
| Устройство для измерения положения уровня | 1989 |
|
SU1673853A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗУБЧАТЫХ КОЛЕС ГОРЯЧЕЙ ПРОКАТКОЙ | 0 |
|
SU315497A1 |

