Изобретение относится к области строительства, а именно к способам возведения зданий и сооружений.
Цель изобретения - повышение производительности труда, обеспечение поточного строительства и высокого уровня автоматизации всего комплекса технологических операций.
Поставленная цель достигается тем, что в автоматизированном способе возведения зданий и сооружений, включающем применение механизма, имеющего подвижные несущие колонны с горизонтальными продольными направляющими, установленную с возможностью перемещения вдоль них поперечную раму с направляющими, с подвижно установленной на ней кареткой, несущий рабочий орган для выполнения земляных работ, устройства фундаментов и подвальных помещений, кирпичных стен, перекрытий и покрытия, выполнения полов и кровельных работ зданий и сооружений формируют набор рабочих органов, каретку снабжают механизмом смены рабочих органов, а количество поперечных рам устанавливают с учетом объемов строительных работ. При этом поперечные рамы могут быть снабжены консолями для расширения рабочей зоны.
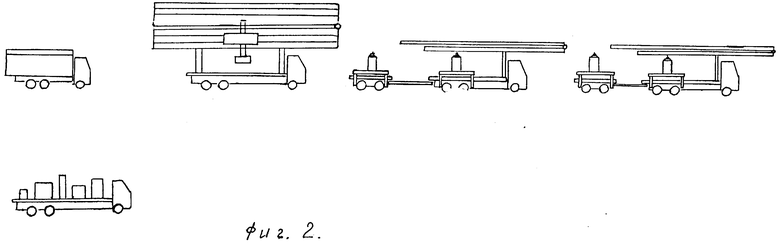
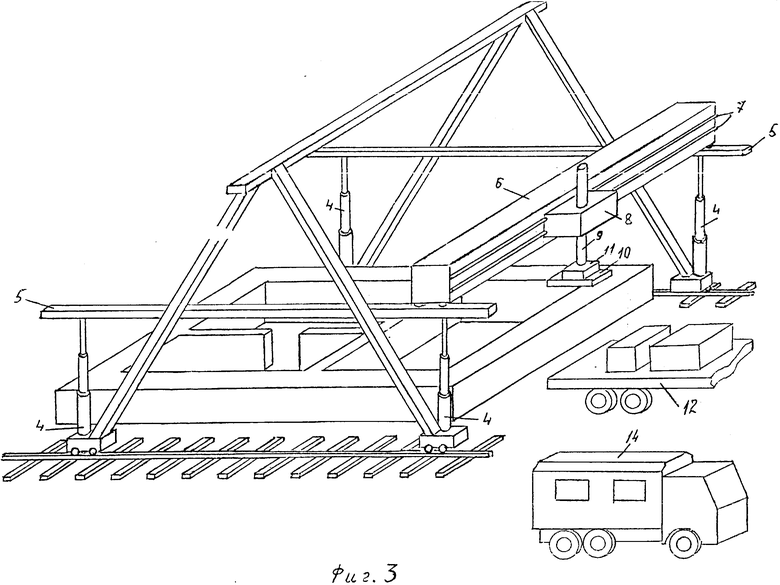
Предлагаемое изобретение поясняется чертежами, где на фиг. 1 изображен общий вид строительной площадки при устройстве надземной части зданий и сооружений при помощи автоматизированного строительного комплекса (АСК). На фиг. 2 - автоматизированный строительный комплекс в транспортном положении. На фиг. 3 - один из вариантов реализации автоматизированного строительного комплекса.
Использование автоматизированного строительного комплекса в строительстве предполагает отказ от традиционных технологических схем.
Возведение зданий и сооружений согласно предлагаемому способу осуществляется в следующем порядке. На строительной площадке предварительно прокладываются все инженерные коммуникации, выполняется вертикальная планировка, устройство подъездных путей и площадок складирования.
Выполняют разбивку на площадке строительства будущего здания и сооружения. На площадки, расположенные за контурами здания, подходят автомобили 1. Автомобили 1 и их прицепы устанавливаются на заранее размеченных относительно объекта позициях. Несущие платформы 2 устанавливаются на гидравлические опоры 3. Автоматические устройства, которыми снабжены платформы 2, управляя опорами 3, производят корректировку платформ в плане и по высоте (нивелирование).
На вертикальные опоры 4 укладывают горизонтальные продольные направляющие 5, на которых устанавливают с возможностью перемещения вдоль них поперечная рама 6 с направляющими 7 с подвижно установленной на ней кареткой 8, несущей вертикально подвижную штангу 9, к которой подсоединяют рабочий орган 10 через механизм смены рабочих органов 11.
При помощи автоматических устройств, выполненных на платформах 2 и датчиков, установленных на направляющих 5, производится нивелирование их по высоте.
Таким образом, координатная система, образованная опорами 4, направляющими 5 и поперечной рамой, устанавливается в рабочее положение.
Комплект рабочих органов, необходимых для выполнения земляных работ, устройства фундаментов и подвальных помещений, возведения стен, изготовления перекрытий и покрытия, полов, кровельных работ, размещают на площадке-магазине, смонтированной на шасси автомобиля 12. В транспортном положении поперечную раму 6 размещают на автомобиль 13. В автомобиле 14 находится рабочее место оператора, имеющее связь с механизмами комплекса по радиоканалу или по кабелю.
По командам с рабочего места оператора, расположенного в автомобиле 14, управляя высотой опор 4, положением поперечной рамы 6, каретки 8 и вертикальной штанги 9, механизм смены рабочих органов 11 приводится в нулевую точку проекта. Фиксируют состояние всех механизмов координатной системы.
По команде оператора с платформы автомобиля 12 берется первый рабочий орган и по специальной программе выполняется первая операция, связанная с производством земляных работ. Будущий котлован разрабатывается до требуемой отметки, его форма зависит от вида фундаментов и наличия подвальных помещений.
Управляющие программы на каждую операцию формируются путем специальной обработки проекта строящегося здания, выполненного графическим редактором на ПЭВМ. При этом управляющие программы содержат координатную привязку рабочего органа соответствующей ему операции относительно нулевой точки проекта.
Каждый вид строительных работ технологически увязывается со всеми сопутствующими механизмами и транспортными средствами, необходимыми для выполнения отдельной операции.
Рабочий орган по устройству фундаментов предполагает выполнение различных типов фундаментов в зависимости от действующих нагрузок, конструктивных особенностей зданий и сооружений, инженерно-технологических условий строительной площадки. Фундаменты здания могут быть выполнены в виде "стена в грунте", сплошной монолитной железобетонной плиты, фундаменты на естественном основании и т.д. Стены подвальных помещений изготавливают из кирпича, монолитного бетона, крупноблочных элементов.
Все последующие операции по возведению зданий и сооружений выполняются каждая своим рабочим органом и по специальным программам.
Объемы кладки наружных и внутренних кирпичных стен с дверными и оконными проемами заполняются кирпичом с учетом типа кладки, перевязки швов и с фиксированием координат каждого кирпича с учетом ориентации его в пространстве относительно нулевой точки проекта. Конструкция стен здания может быть выполнена в виде сплошной кирпичной кладки, колодцевой кладки с заполнением теплоизоляционным монолитным бетоном, из монолитного бетона.
Устройство полов зданий и сооружений, связанное с исполнением пароизоляции, укладкой утеплителя, выравниванием стяжки, покрытия полов, производится перед устройством перекрытия очередного этажа при помощи своего рабочего органа.
После завершения кладки наружных и внутренних стен очередного этажа по команде управляющей программы выполняются железобетонные перекрытия и покрытия последнего этажа в монолитном или сборном исполнении, кровельные работы в зависимости от конструкции крыши здания.
Количество опор 4, направляющих 5 и поперечных рам 6 определяется размерами зданий и сооружений в плане, их высотой, сроками выполнения строительных работ. Автоматизированный способ предусматривает установку двух или более поперечных рам 6 по направляющим 5 с рабочими органами, выполняющими различные технологические операции с возможностью организации поточного метода.
Один из вариантов реализации автоматизированного способа возведения зданий и сооружений представлен на фиг. 3.
Таким образом, предлагаемый автоматизированный способ возведения зданий и сооружений позволит обеспечить поточное строительство, производить и автоматизировать почти все основные строительные операции, начиная земляными работами и кончая кровельными. Это позволит повысить производительность труда, качество и надежность, значительно сократить сроки строительства, существенно повысить культуру производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗВЕДЕНИЯ ЗДАНИЯ | 2023 |
|
RU2812973C1 |
| Установка для кладки кирпича | 1989 |
|
SU1679014A1 |
| Способ изготовления крупногабаритного готового объемного модуля и способ строительства здания из крупногабаритных готовых объемных модулей | 2018 |
|
RU2712845C1 |
| СПОСОБ СТРОИТЕЛЬСТВА ВСТАВКИ МЕЖДУ ДВУМЯ ЗДАНИЯМИ И КОМПЛЕКТУЮЩИЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292434C1 |
| Способ возведения зданий и сооружений с несущими монолитными железобетонными конструкциями с применением железобетонных стеновых панелей | 2018 |
|
RU2678750C1 |
| Способ автоматизированного возведения сооружений | 2021 |
|
RU2761783C1 |
| Способ автоматизированного монтажа внешнего ограждения гравитационного накопителя энергии и система для его реализации | 2021 |
|
RU2759162C1 |
| СПОСОБ РАЗРУШЕНИЯ МОНОЛИТНЫХ МАССИВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547526C2 |
| Способ возведения стенчатого фундамента с использованием ребристых плит перекрытий (покрытий) | 2017 |
|
RU2671019C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНЫХ ФУНДАМЕНТОВ И СТЕН ЗДАНИЙ И СООРУЖЕНИЙ ИЗ ПЛАСТИЧНЫХ БЛОКОВ | 2012 |
|
RU2532117C2 |
Изобретение относится к области строительства, а именно к способам возведения зданий и сооружений. Автоматизированный способ возведения зданий и сооружений позволяет повысить производительность труда, обеспечивает поточное строительство и высокий уровень автоматизации всего комплекса технологических операций. Это достигается тем, что для выполнения земляных работ, устройства фундаментов и подвальных помещений, кирпичных стен, перекрытий и покрытия, выполнения полов и кровельных работ зданий и сооружений формируют набор рабочих органов, каретку снабжают механизмом смены рабочих органов, а количество поперечных рам устанавливают с учетом объемов строительных работ. 3 ил.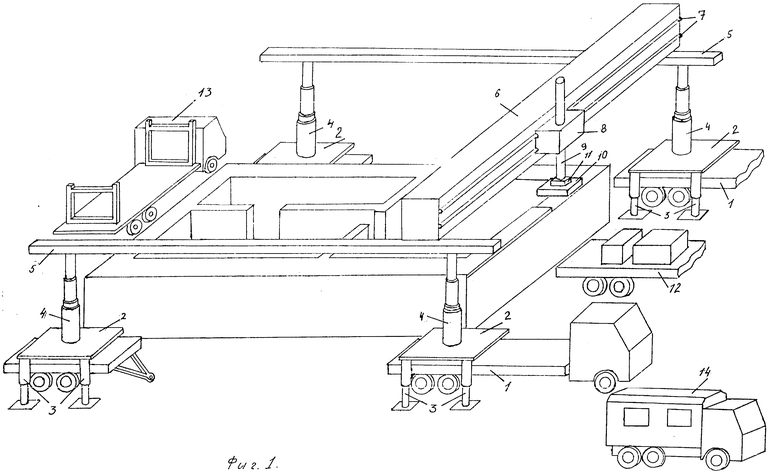
Автоматизированный способ возведения зданий и сооружений, включающий применение механизма, имеющего вертикально подвижные несущие колонны с горизонтальными продольными направляющими, установленную с возможностью перемещения вдоль них поперечную раму с направляющими, с подвижно установленной на ней кареткой, несущей рабочий орган, при этом для выполнения земляных работ, устройства фундаментов и подвижных помещений, кирпичных стен, перекрытий и покрытия, выполнения полов и кровельных работ зданий и сооружений формируют набор рабочих органов, каретку снабжают механизмом смены рабочих органов, а количество поперечных рам устанавливают с учетом объемов строительных работ.
