В настоящее время разработаны регуляторы с переменной структурой, с различными оптимальными законами регулирования, но широкого применения в промышленности они не нашли из-за недостаточной устойчивости при малых отклонениях регулируемого параметра /возле нормы/, при скоростных помехах; из-за сложности выделения второй производной регулируемого параметра.
Ближайшим прототипом для регулятора, построенного по предлагаемому способу, может служить регулятор по авт.св. N 332430.
В этом регуляторе имеется регулирование отрицательной обратной связи, что расширяет возможности этого регулятора как ПИД с задержкой на запаздывание, но остаются все вышеперечисленные недостатки.
Цель изобретения заключается в упрощении выделения второй производной с демпфированием первой производной, повышении надежности управления сбросами части регулирующего воздействия, сформированной по второй производной, обеспечивающими быстродействие регулирования и адаптацию к изменениям динамической характеристики объекта, ликвидации сброса воздействия при малых отклонениях параметра, что увеличивает устойчивость регулятора. Благодаря предлагаемому способу формируется новый вид воздействия - пропорционально-интегральный с второй производной /без первой/ и со сбросом - ПИД'•С.
Выделение второй производной связано с применением для этой цели большого коэффициента усиления, что приводит к автоколебательности выхода усилителя, которую раньше избегали.
По предлагаемому способу нарочито вводят автоколебательность выходного значения усилителя, которую контролируют с помощью отрицательной обратной связи, управляемой /через множитель/ скоростным сигналом. Указанные связь и сигнал берут на выходе усилителя перед релейным элементом.
При отсутствии входного импульса амплитуда колебаний не достигает уровня срабатывания релейного элемента.
Таким образом, применяют большой коэффициент усиления и активно демпфируют первую производную изменяющегося регулируемого параметра /входного импульса/.
Срабатывание релейного элемента происходит за счет смещения автоколебаний в сторону той или иной полярности под воздействием входного значения на усилитель.
Уровень отрицательной обратной связи /управляющей/ таков, что достаточен для формирования регулирующих воздействий на всем диапазоне возможных отклонений контролируемого параметра.
В связи с тем, что в реальных объектах регулирования существуют транспортные запаздывания, изменения характеристик и т.д., вводят дополнительную регулирующую отрицательную обратную связь, которую берут после релейного элемента регулятора.
С помощью этой связи организуют срыв автоколебаний или изменение частоты и амплитудности; запоминание и сброс части воздействия на исполнительный механизм /упреждающей/.
Величина упреждения создается при наличии второй производной в динамической характеристике объекта.
Сброс в зависимости от динамики объекта организуют до достижения в процессе регулирования максимального значения отклонения и при движении параметра к норме.
Отличительной чертой этой связи является то, что между первым демпфирующим элементом и последующими вводят ключ, управляемый по скорости выхода усилителя. Назначение такого управления - логически увеличить инерционность этой связи для выделения второй производной и устранения возможности сброса при малых отклонениях параметра. При малых отклонениях параметра достаточен ПИ-закон регулирования с запоминанием /на демпфирующих элементах/.
Ключ пропускает во время роста выхода усилителя до значения срабатывания реле и больше, но не пропускает при спаде амплитуды.
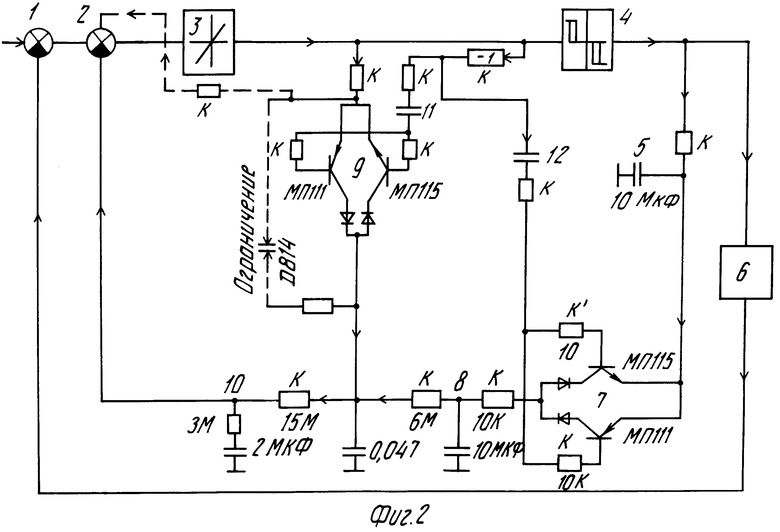
На фиг. 1 и 2, представлены схемы для реализации способа, где 1, 2 - сумматоры, 3 - усилитель регулятора, 4 - релейный элемент, 5 - первый демпфирующий элемент, 6 - объект регулирования, 7 - ключ, 8 - промежуточный демпфирующий элемент, 9 - множитель, 10 - оконечный демпфирующий элемент, 11, 12 - скоростные сигналы обратной связи, K - согласующие элементы.
Здесь обратную отрицательную связь и ее скоростную составляющую направляют на множитель 9, затем на оконечный демпфирующий элемент 10.
Существенным является и то, что скоростной элемент имеет вид 
Вводят усилитель в автоколебания, не достигающие уровня срабатывания релейного элемента /T= 4 с, например/. При появлении же на входе сумматора входного импульса /задания/ автоколебания смещаются, срабатывает релейный элемент 4.
Отрицательную обратную связь после релейного элемента запоминают на первом демпфирующем элементе и, когда амплитуда вновь начнет расти, с помощью скоростной связи открывают ключ 7 и направляют на промежуточный демпфирующий элемент, а затем не оконечный. При этом автоколебания постепенно срываются на малую амплитуду, но достаточную для подкачки промежуточного демпфирующего элемента из первого без включения релейного элемента.
Таким образом, создается избыточный уровень на промежуточном элементе. В результате происходит реверс и сброс упреждающего воздействия по величине, зависящей от второй производной /Д'/ входного импульса на регулятор.
При малых отклонениях регулируемого параметра ключ 7 имеет малый пропуск /небольшой заряд на первом демпфирующем элементе/, поэтому сброс не происходит, а только запоминание, что увеличивает устойчивость регулятора. Элемент K перед множителем может быть активным усилителем.
В случае выхода регулируемого параметра за пределы регулирования по закону ПИД'С осуществлен переход регулирования на ПИ-закон путем закорачивания множителя ограничением типа "зона нечувствительности", причем величина этой зоны нечувствительности больше зоны нечувствительности выходного релейного элемента регулятора.
Применение предложенного регулятора желательно при регулировании инерционных процессов.
Эффективность достигают за счет быстродействия, адаптации к изменениям характеристики объекта и терпимости к запаздываниям до 1 мин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗБИРАТЕЛЬНОГО ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ВЕЩЕСТВ В РАСТВОРАХ | 1996 |
|
RU2122726C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАСХОДОВ РЕАГИРУЮЩИХ ВЕДУЩЕГО И ВЕДОМОГО КОМПОНЕНТОВ | 1992 |
|
RU2074412C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1972 |
|
SU332430A1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1335928A1 |
| Устройство для управления электроприводом | 1972 |
|
SU731417A1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЛЕЙНЫХ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ | 1972 |
|
SU330428A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1970 |
|
SU1839997A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
Предлагаемый способ относится к области автоматического регулирования. Цель изобретения - упрощение и повышение надежности способа регулирования со сбросом упреждающего воздействия, сформированного по второй производной /ПИД'С/. Согласно предлагаемому способу, усилитель регулятора вводят в автоколебательный режим с величиной амплитуды, не превышающей уровня срабатывания выходного релейного элемента при нулевом входном импульсе, причем автоколебания организуют с помощью управляющей отрицательной связи, взятой с выхода усилителя регулятора до релейного элемента, умноженной на ее скоростную составляющую, что позволяет активно демпфировать первую и выделять вторую производную по изменению входного импульса. Кроме того, применяют дополнительную отрицательную связь, взятую после релейного элемента, но между первым /входным/ и промежуточным демпфирующим элементом устанавливают ключ, управляемый скоростным сигналом, взятым до релейного элемента. Регулирование по данному способу рекомендуется применять к объектам с большим запаздыванием и там, где требуется адаптация к изменениям динамической характеристики. 2 ил.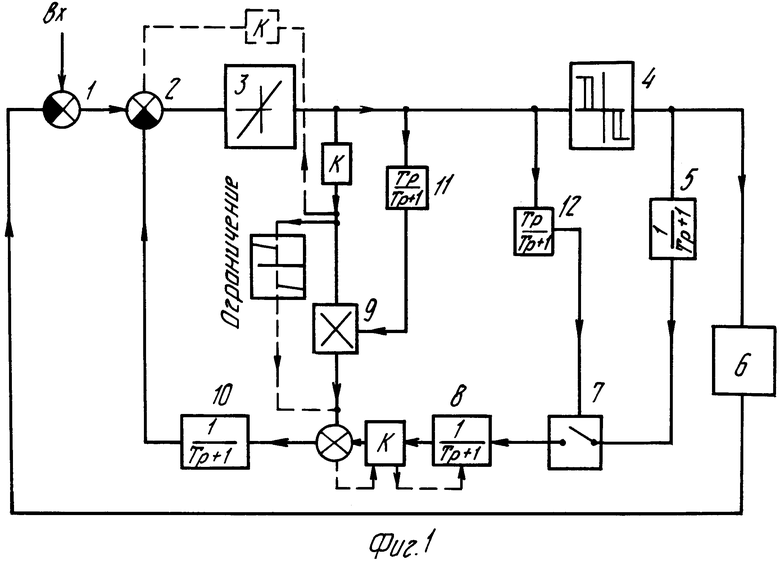
Способ авторегулирования со сбросом упреждающего воздействия по второй производной, согласно которому усиливают входной импульс с помощью усилителя и подают сигнал с выхода усилителя на релейный элемент, отличающийся тем, что вводят усилитель в режим автоколебаний, амплитуда которых при нулевом входном импульсе не превышает уровня срабатывания релейного элемента, для чего сигнал с выхода усилителя умножают на его скоростную составляющую вида  сигнал, сформированный в результате умножения, демпфируют с помощью оконечного демпфирующего элемента и подают на вход усилителя, а при ненулевом входном импульсе, вызывающем срабатывание релейного элемента, формируют дополнительную отрицательную обратную связь, для чего демпфируют сигнал с выхода релейного элемента с помощью первого демпфирующего элемента, пропускают его через ключевой элемент, управляемый скоростной составляющей сигнала с выхода усилителя, последовательно демпфируют полученный сигнал с помощью промежуточного и оконечного демпфирующих элементов и подают сформированный сигнал на вход усилителя.
сигнал, сформированный в результате умножения, демпфируют с помощью оконечного демпфирующего элемента и подают на вход усилителя, а при ненулевом входном импульсе, вызывающем срабатывание релейного элемента, формируют дополнительную отрицательную обратную связь, для чего демпфируют сигнал с выхода релейного элемента с помощью первого демпфирующего элемента, пропускают его через ключевой элемент, управляемый скоростной составляющей сигнала с выхода усилителя, последовательно демпфируют полученный сигнал с помощью промежуточного и оконечного демпфирующих элементов и подают сформированный сигнал на вход усилителя.
| SU, авторское свидетельство, 332430, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |

