Изобретение относится к импульсным средствам автоматического управления и может быть использовано в качестве пропорционально-интегрального регулятора в системах управления врубовыми машинами.
Целью изобретения является повышение быстродействия и статической точности регулятора.
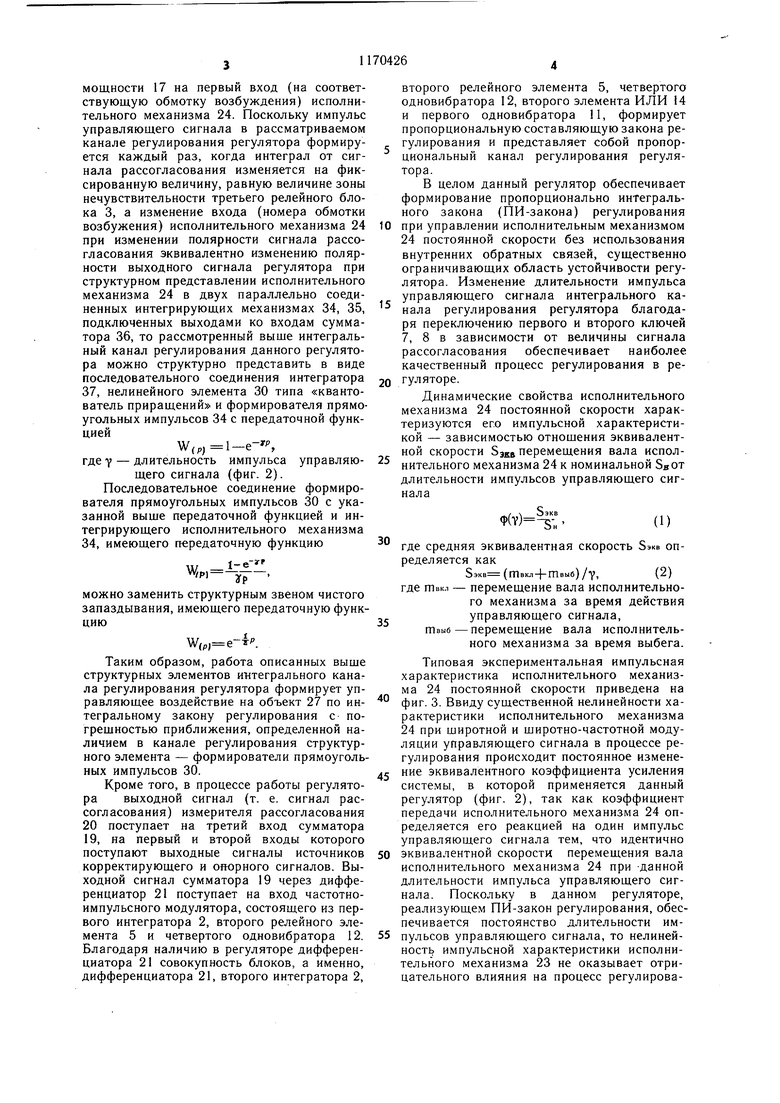
На фиг. 1 приведена функциональная схема регулятора; на фиг. 2 - структурная схема системы управления с данным регулятором; на фиг. 3 - импульсная характеристика исполнительного механизма.
На схеме обозначены второй и первый интеграторы 1 и 2, третий, первый, второй, четвертый релейные блоки 3, 4, 5, 6, первый и второй ключи 7 и 8, второй, третий, первый и четвертый одновибраторы 9, 10, 11, 12, первый и второй элементы ИЛИ 13, 14, первый и второй элементы И 15, 16, первый и второй усилители мощности 17, 18, сумматор 19, измеритель рассогласования 20, дифференциатор 21, источник опорного сигнала 22, задатчик 23, исполнительный механизм 24, источник корректирующего сигнала 25, датчик регулируемого параметра 26, объект 27, первый и второй частотно-импульсные модуляторы 28 и 29, первый и второй нелинейные элементы 30 и 31, первый и второй формирователи прямоугольных импульсов 32 и 33, исполнительные механизмы 34 и 35, сумматор 36, интеграторы 37 и 38, Us - сигнал задания, UK - корректирующий сигнал. Up - регулирующий параметр, -у - длительность импульсов, Зэке - средняя эквивалентная скорость вращения вала исполнительного механизма 24, So - номинальная скорость вращения вала исполнительного механизма 24.
В состав первого частотно-импульсного модулятора 28 функционально входят второй интегратор 1, третий релейный блок 3 и третий одновибратор 10, а структурно - интегратор 37, нелинейный элемент 30 и формирователь прямоугольных импульсов 32
В состав второго частотно-импульсного модулятора 29 функционально входят первый интегратор 2, второй релейный блок 5 и четвертый одновибратор 13, а структурно - интегратор 38, нелинейный элемент 31 и формирователь прямоугольных импульсов 33.
В качестве исполнительного механизма 24 в данном регуляторе применяется исполнительный механизм постоянной скорости, причем этот исполнительный механизм изображен на функциональной схеме регулятора (фиг. 1) в виде одного функциональ ного блока 24, а на структурной схеме регулятора (фиг. 2) - в виде трех структурных блоков: исполнительных механизмов 34, 35 и сумматора 36.
Регулятор работает следующим образом.
На один из входов измерителя рассогласования 20 поступает сигнал Up с выхода
датчика регулируемого параметра 26, на другой вход которого поступает сигнал Us с выхода задатчика 23. На выходе измерителя рассогласования 20 формируется сигнал рассогласования, который поступает на сигнальный вход второго интегратора 1, на третий вход сумматора 19 и на входы первого и четвертого релейного блоков 4 и 6. . Сигнал рассогласования интегрируется во втором интеграторе 1 и поступает на вход третьего релейного блока 3. При достижении выходным сигналом второго интегратора 1 величины, превышающей зону нечувствительности третьего релейного блока 3, последний срабатывает и формирует импульсный сигнал, который своим передним фронтом производит запуск третьего одновибратора 10 и в зависимости от состояния ключей 7 и 8 второго или первого одновибраторов 9 и 11. Выбор запускаемого одновибратора 9 (или 11) зависит
Q от абсолютной величины сигнала рассогласования. В том случае, если сигнал рассогласования не превышает по величине зоны нечувствительности первого релейного блока 4, то на его выходе сигнал отсутствует и первый ключ 7 находится в замкнутом
5 состоянии. Выходной сигнал третьего релейного блока 3 через замкнутый первый ключ 7 поступает на вход второго одновибратора 9, который срабатывает по переднему фронту своего входного сигнала. Длительность импульсов на выходе третьего одно0 вибратора 10 устанавливается минимально возможной из условия полного разряда второго интегратора 1 при срабатывании одновибратора 10, а длительность импульсов на выходе второго одновибратора 9 устанавливается, исходя из требования обеспечения наибольшей установившейся точности отработки заданного значения регулируемого параметра.
В зависимости от полярности сигнала рассогласования выходной импульсный сигнал второго одновибратора 9 через первый элемент ИЛИ 13 поступает на нужную обмотку возбуждения исполнительного меха..изма 24, который воздействует на объект 27 таким образом, чтобы уменьшить сигнал рассогласования. Выбор обмотки возбуждения исполнительного механизма 24 определяется выходным сигналом четвертого релейного блока 6. Например, если сигнал рассогласования положителен, то на прямом выходе четвертого релейного блока присутствует
0 выходной сигнал, а на его инверсном выходе - отсутствует. При этом импульсный выходной сигнал первого элемента ИЛИ 13 поступает на вторые входы первого и второго элементов И 15, 16, а сигнал на прямом выходе четвертого релейного блока 6
5 поступает на первый вход первого элемента И 15 и разрешает прохождение выходного сигнала первого элемента ИЛИ 13 через первый элемент И 15 и усилитель
мощности 17 на первый вход (на соответствующую обмотку возбуждения) исполнительного механизма 24. Поскольку импульс управляющего сигнала в рассматриваемом канале регулирования регулятора формируется каждый раз, когда интеграл от сигнала рассогласования изменяется на фиксированную величину, равную величине зоны нечувствительности третьего релейного блока 3, а изменение входа (номера обмотки возбужения) исполнительного механизма 24 при изменении полярности сигнала рассогласования эквивалентно изменению полярности выходного сигнала регулятора при структурном представлении исполнительного механизма 24 в двух параллельно соединенных интегрирующих механизмах 34, 35, подключенных выходами ко входам сумматора 36, то рассмотренный выше интегральный канал регулирования данного регулятора можно структурно представить в виде последовательного соединения интегратора 37, нелинейного элемента 30 типа «квантователь приращений и формирователя прямоугольных импульсов 34 с передаточной функцией
-eW(p,lгде Y - длительность импульса управляющего сигнала (фиг. 2). Последовательное соединение формирователя прямоугольных импульсов 30 с указанной выще передаточной функцией и интегрирующего исполнительного механизма 34, имеющего передаточную функцию
W 1-еW/B1 - -IT,
IP
arp
можно заменить структурным звеном чистого запаздывания, имеющего передаточную функцию
W,,,e-i.
Таким образом, работа описанных выще структурных элементов интегрального канала регулирования регулятора формирует управляющее воздействие на объект 27 по интегральному закону регулирования с погрешностью приближения, определенной наличием в канале регулирования структурного элемента - формирователи прямоугольных импульсов 30.
Кроме того, в процессе работы регулятора выходной сигнал (т. е. сигнал рассогласования) измерителя рассогласования 20 поступает на третий вход сумматора 19, на первый и второй входы которого поступают выходные сигналы источников корректирующего и опорного сигналов. Выходной сигнал сумматора 19 через дифференциатор 21 поступает на вход частотноимпульсного модулятора, состоящего из первого интегратора 2, второго релейного элемента 5 и четвертого одновибратора 12. Благодаря наличию в регуляторе дифференциатора 21 совокупность блоков, а именно, дифференциатора 21, второго интегратора 2,
второго релейного элемента 5, четвертого одновибратора 12, второго элемента ИЛИ 14 и первого одновибратора 11, формирует пропорциональную составляющую закона регулирования и представляет собой пропорциональный канал регулирования регулятора.
В целом данный регулятор обеспечивает формирование пропорционально интегрального закона (ПИ-закона) регулирования при управлении исполнительным механизмом 24 постоянной скорости без использования внутренних обратных связей, существенно ограничивающих область устойчивости регулятора. Изменение длительности импульса управляющего сигнала интегрального канала регулирования регулятора благодаря переключению первого и второго ключей 7, 8 в зависимости от величины сигнала рассогласования обеспечивает наиболее качественный процесс регулирования в регуляторе.
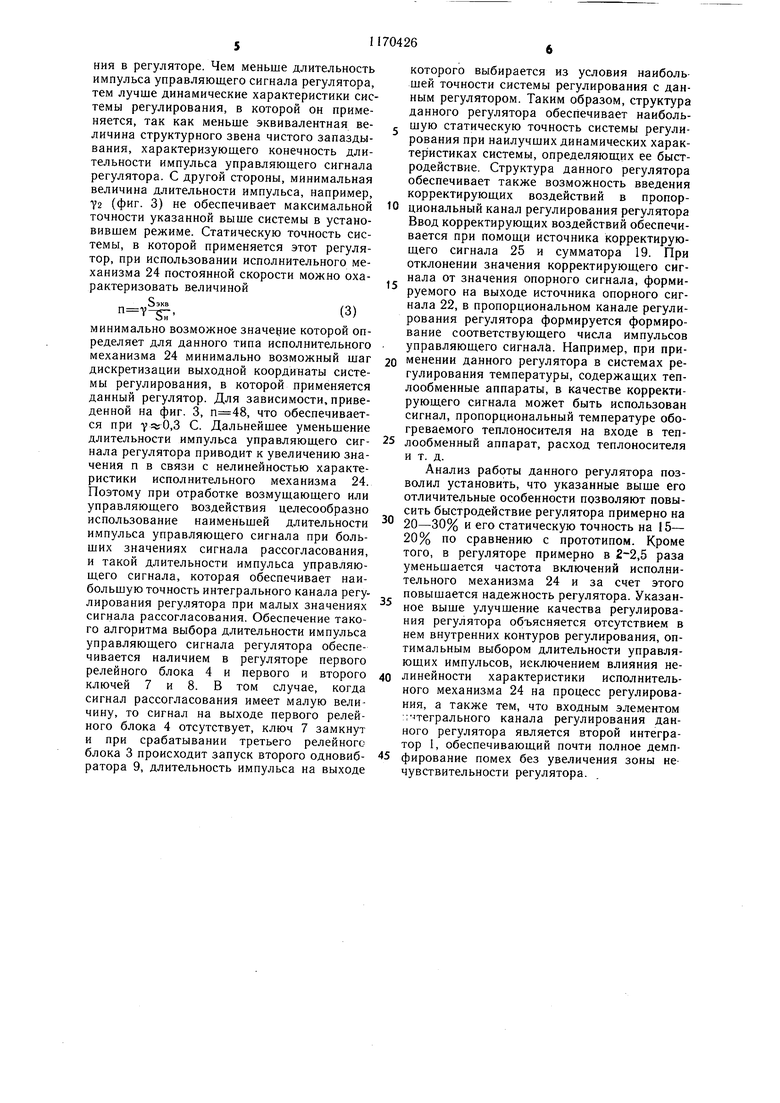
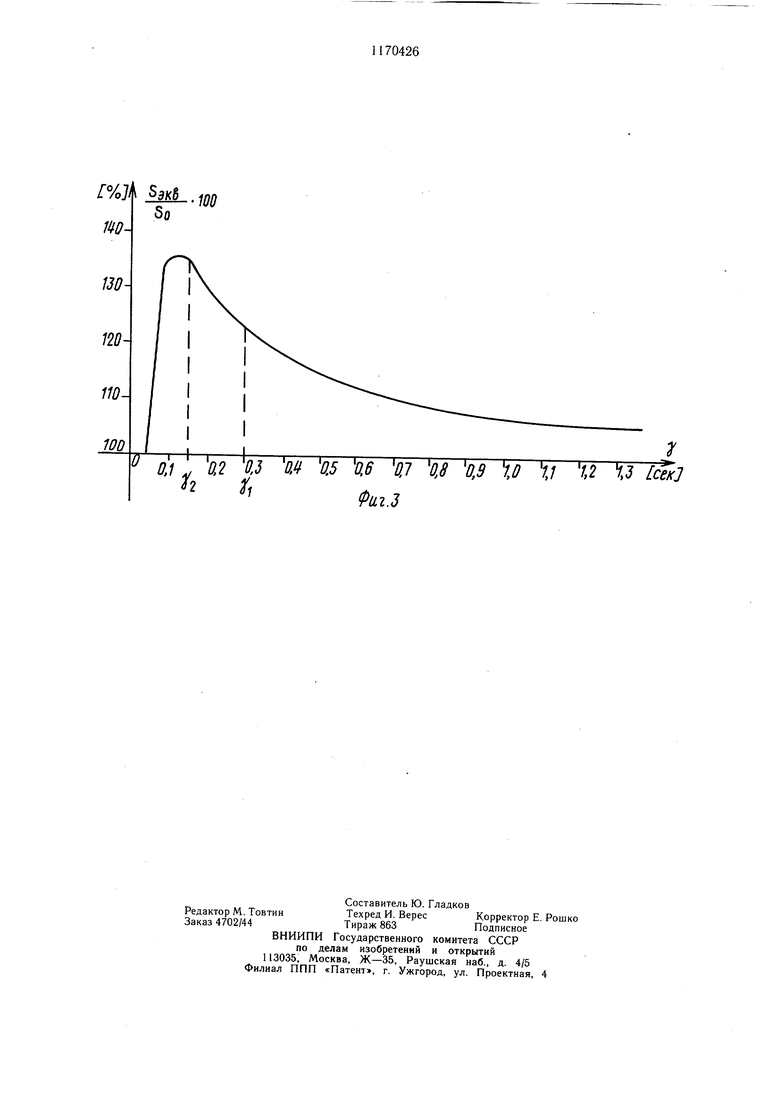
Динамические свойства исполнительного механизма 24 постоянной скорости характеризуются его импульсной характеристикой - зависимостью отношения эквивалентной скорости 5экв перемещения вала исполнительного механизма 24 к номинальной Звот длительности импульсов управляющего сигнала
f(v)%:
(1)
где средняя эквивалентная скорость 5экв определяется как
5экв(твкл-)-твыб)/у,(2)
где Швк.1 - перемещение вала исполнительного механизма за время действия управляющего сигнала, гпвыб-перемещение вала исполнительного механизма за время выбега.
Типовая экспериментальная импульсная характеристика исполнительного механизма 24 постоянной скорости приведена на фиг. 3. Ввиду существенной нелинейности характеристики исполнительного механизма 24 при широтной и широтно-частотной модуляции управляющего сигнала в процессе регулирования происходит постоянное изменение эквивалентного коэффициента усиления систе.мы, в которой применяется данный регулятор (фиг. 2), так как коэффициент передачи исполнительного механизма 24 определяется его реакцией на один импульс управляющего сигнала тем, что идентично эквивалентной скорости перемещения вала исполнительного механизма 24 при -данной длительности импульса управляющего сигнала. Поскольку в данном регуляторе, реализующем ПИ-закон регулирования, обеспечивается постоянство длительности импульсов управляющего сигнала, то нелинейность импульсной характеристики исполнительного механизма 23 не оказывает отрицательного влияния на процесс регулирования в регуляторе. Чем меньше длительность импульса управляющего сигнала регулятора, тем лучше динамические характеристики системы регулирования, в которой он применяется, так как меньше эквивалентная величина структурного звена чистого запаздывания, характеризующего конечность длительности импульса управляющего сигнала регулятора. С другой стороны, минимальная величина длительности импульса, например, 72 (фиг. 3) не обеспечивает максимальной точности указанной выше системы в установившем режиме. Статическую точность системы, в которой применяется этот регулятор, при использовании исполнительного механизма 24 постоянной скорости можно охарактеризовать величиной
Оэкв/о
,(3)
минимально возможное значе1 ие которой определяет для данного типа исполнительного механизма 24 минимально возможный щаг дискретизации выходной координаты системы регулирования, в которой применяется данный регулятор. Для зависимости,приведенной на фиг. 3, , что обеспечивается при .3 С. Дальнейшее уменьшение длительности импульса управляющего сигнала регулятора приводит к увеличению значения п в связи с нелинейностью характеристики исполнительного механизма 24. Поэтому при отработке возмущающего или управляющего воздействия целесообразно использование наименьщей длительности импульса управляющего сигнала при больших значениях сигнала рассогласования, и такой длительности импульса управляющего сигнала, которая обеспечивает наибольшую точность интегрального канала регулирования регулятора при малых значениях сигнала рассогласования. Обеспечение такого алгоритма выбора длительности импульса управляющего сигнала регулятора обеспечивается наличием в регуляторе первого релейного блока 4 и первого и второго ключей 7 и 8. В том случае, когда сигнал рассогласования имеет малую величину, то сигнал на выходе первого релейного блока 4 отсутствует, ключ 7 замкнут и при срабатывании третьего релейного блока 3 происходит запуск второго одновибратора 9, длительность импульса на выходе
которого выбирается из условия наибольщей точности системы регулирования с данным регулятором. Таким образом, структура данного регулятора обеспечивает наиболь Шую статическую точность системы регулирования при наилучших динамических характергистиках системы, определяющих ее быстродействие. Структура данного регулятора обеспечивает также возможность введения корректирующих воздействий в пропорциональный канал регулирования регулятора Ввод корректирующих воздействий обеспечивается при помощи источника корректирующего сигнала 25 и сумматора 19. При отклонении значения корректирующего сигнала от значения опорного сигнала, формируемого на выходе источника опорного сигнала 22, в пропорциональном канале регулирования регулятора формируется формирование соответствующего числа импульсов управляющего сигнала. Например, при применении данного регулятора в системах регулирования температуры, содержащих теплообменные аппараты, в качестве корректирующего сигнала может быть использован сигнал, пропорциональный температуре обогреваемого теплоносителя на входе в теп5 лообменный аппарат, расход теплоносителя и т. д.
Анализ работы данного регулятора позволил установить, что указанные выше его отличительные особенности позволяют повысить быстродействие регулятора примерно на
20-30% и его статическую точность на 15- 20% по сравнению с прототипом. Кроме того, в регуляторе примерно в ,5 раза уменьшается частота включений исполнительного механизма 24 и за счет этого повышается надежность регулятора. Указанное выше улучшение качества регулирования регулятора объясняется отсутствием в нем внутренних контуров регулирования, оптимальным выбором длительности управляющих импульсов, исключением влияния нелинейности характеристики исполнительного механизма 24 на процесс регулирования, а также тем, что входным элементом :;чтегрального канала регулирования данного регулятора является второй интегратор 1, обеспечивающий почти полное демпфирование помех без увеличения зоны не чувствительности регулятора.
2ИП
N -0
;
fcij
М-.щ 5о
т0.1 ., 4 55 0.6 ОЛ 0,8 О.д 10 1
и Фаг.З
1,2 13 сек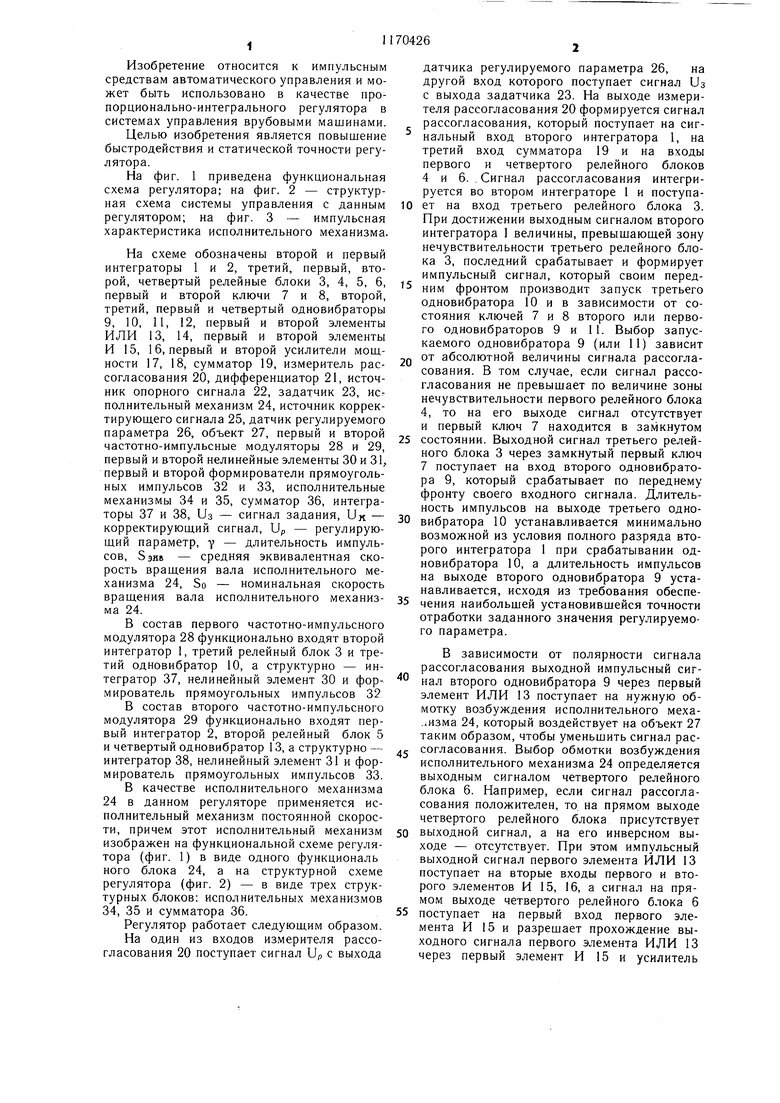
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1339490A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
ИМПУЛЬСНЫЙ РЕГУЛЯТОР, содержащий измеритель рассогласования, дифференциатор, сумматор, первый и второй одновибраторы, первый элемент ИЛИ, первый релейный блок, первый и второй ключи, первый интегратор, последовательно соединенные второй релейный блок и второй элемент ИЛИ, второй интегратор, соединенный управляющим входом с выходом третьего одновибратора, а выходом - со входом третьего релейного блока, четвертый релейный блок, соединенный выходами с первыми входами соответственно первого и второго элементов И, первый и второй усилители мощности, соединенные выходами соответственно с первым и вторым входами исполнительного механизма, отличающийся тем, что, с целью повышения быстродейст вин и статической точности регулятора, в нем дополнительно установлены источники опорного и корректирующего сигналов и четвертый одновибратор, соединенный входом с выходом второго релейного блока, а вы.ходом - с управляющим входом первого интегратора, подключенного выходом ко входу второго релейного блока, а входом через дифференциатор - к выходу сумматора, соединенного первым входом с выходом источника опорного сигнала, вторым входом - с выходом источника корректирующего сигнала, а третьим входом - с выходом измерителя рассогласования, с входом четвертого релейного блока, с сигнальным входом второго интегратора и с входом первого релейного блока, выходом соединенного с упi равляющими входами первого и второго ключей, подключенных сигнальными входами (Л к выходу третьего релейного блока и ко входу третьего одновибратора, выход второго ключа соединен со вторым входом второго элемента ИЛИ, подключенного выходом через первый одновибратор к первому входу первого элемента ИЛИ, соединенного вторым входом через второй одновибратор с выходом первого ключа, а выходом - со вторыми входами первого и второго элементов И, подключенных выходами ко входам соответствующих усилителей мощности. 4 to О5
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
