Предлагаемое изобретение относится к системам автоматического управления угловым положением космического аппарата (КА).
Общеизвестны системы управления угловым положением КА, содержащие пропорциональный датчик ориентации, релейный элемент с зоной нечувствительности и зоной неоднозначности (петля гистерезиса), осуществляющий включение исполнительного органа. Устойчивость в такой системе обеспечивается путем охвата релейного элемента отрицательной обратной связью через апериодическое (запаздывающее) звено. В этом случае сигнал ошибки подвергается импульсной модуляции и среднее значение управляющего момента становится пропорциональным в первом приближении величине ошибки и ее первой производной по времени.
Известно, что в предельном цикле длительность импульса зависит лишь от параметров релейного элемента, постоянной времени и коэффициента пропорциональности апериодического звена обратной связи и не зависит от величины углового ускорения КА, определяемого отношением управляющего момента инерции КА (см. Экспресс-информация "Системы автоматического управления", №4 за 1965 г., реферат №14, стр.18-19).
В случае возможных изменений величины управляющего момента исполнительного органа в процессе эксплуатации это является существенным недостатком, так как приводит к значительному изменению параметров предельного цикла и в случае увеличения управляющего момента к повышенному расходу энергии (рабочего тела) даже при отсутствии возмущений на КА.
Если исполнительный орган выполнен в виде электродвигателя с инерционным ротором, то практически всегда принимают меры к стабилизации динамического момента электродвигателя, что существенно усложняет всю систему.
Предлагается система в значительной степени свободна от названного недостатка. Блок-схема такой системы приведена на фиг.1, где обозначено: 1 - пропорциональный датчик ошибки ориентации, 2 - усилитель-сумматор, 3 - поляризованное электронное поле с зоной нечувствительности ± Uсраб и зоной неоднозначности |Uсраб - Uотп| (петлей гистерезиса), 4 - электродвигатель с инерционным ротором, 5 - тахогенератор, встроенный в электродвигатель (датчик угловой скорости ротора электродвигателя), 6 - объект управления, космический аппарат, 7 - запоминающее устройство, 8 - нормально разомкнутый электронный ключ, 9 - инверсный блок с передаточной функцией W=-1, 10 - двухполупериодный выпрямитель, 11 - дифференцирующий блок, 12 - однополупериодный выпрямитель, пропускающий напряжение положительной полярности, 13 - однополупериодный выпрямитель, пропускающий импульсы отрицательной полярности, 14 - блок постоянного запаздывания на время τ, 15 - логический элемент ИЛИ, 16 - логический элемент И, 17 - логический элемент НЕ.
Система работает следующим образом. Пусть ошибка ориентации такова, что на выходе усилителя 2 напряжение превышает положительный уровень срабатывания реле 3. Это приводит к срабатыванию реле 3 и включению электродвигателя на разгон, при этом создается отрицательный управляющий момент -Му. Одновременно в момент срабатывания реле 3 на вход дифференцирующего блока 11 с выхода реле 3 через двухполупериодный выпрямитель 10 подается ступенчатое напряжение. Это ступенчатое напряжение в блоке 11 дифференцируется, и импульс напряжения положительной полярности (соответствует моменту включения реле 3 независимо от знака управляющего момента благодаря наличию двухполупериодного выпрямителя 10) через выпрямитель 12, пропускающий напряжение только положительной полярности, подается на вход логического элемента ИЛИ, а с его выхода на электронный ключ 8, в результате чего ключ 8 на короткое время замыкается и через него на блок 7 подается напряжение с выхода тахогенератора 5, где оно запоминается до следующего замыкания ключа 8. При каждом последующем замыкании ключа 8 на блоке 7 запоминается новое значение напряжения тахогенератора 5.
Так как запомненное блоком 7 напряжение, соответствующее начальной угловой скорости ротора электродвигателя, и напряжение с тахогенератора 5, соответствующее текущей скорости ротора электродвигателя, подаются на вход усилителя-сумматора 2 (при этом напряжение с тахогенератора подается через инверсный блок с передаточной функцией W=-1), то на выходе блока 2 напряжение после включения реле 5 изменяется по закону

где К1 - коэффициент пропорциональности датчика ориентации [в/рад], ε(t) - ошибка ориентации [рад], КТГ - коэффициент пропорциональности тахогенератора [в сек/рад],
i - момент инерции ротора электродвигателя [гсмсек2],
Му(t) - управляющий момент [гсм].
Коэффициент усиления усилителя-сумматора 2 по всем входам принят равным 1.
Через время t=τu напряжение U2 уменьшится до напряжения отпускания реле 3 (т.е. U2=Uотп) и исполнительный орган выключится. Во время паузы напряжение на выходе блока 2 (на входе реле 3) изменяется по закону

где МТ(t) - тормозной момент электродвигателя [гсм], остальные обозначения прежние.
Через время τ0 после выключения реле 3 напряжение достигает вновь напряжения срабатывания +Uсраб или минус Uсраб в зависимости от фазового состояния объекта управления, т.е. происходит импульсная отработка начального рассогласования с последующим установлением автоколебаний.
В момент выключения реле 3 на входе дифференцирующего блока 11 напряжение скачком уменьшается до нуля и с выхода блока 11 импульс напряжения отрицательной полярности (соответствует отпусканию реле 3 независимо от знака предыдущего включенного состояния) через выпрямитель 13, пропускающий только напряжение отрицательной полярности, и блок постоянного запаздывания на время τ подается на вход логического элемента И (блок 16). Если через время τ после выключения исполнительного органа 4 реле 3 оказывается вновь включенным, то импульс отрицательной полярности с блока 14 не проходит на вход блока 15, так как на второй вход логического элемента И (блок 16) подается сигнал с выхода реле 3 через двухполупериодный выпрямитель 10 и логический элемент НЕ (блок 17) и он будет соответствовать логическому нулю.
Если же через время τ после выключения исполнительного органа реле 3 остается выключенным, то отрицательный импульс с выхода блока 14 проходит на вход блока 15 и осуществляет замыкание ключа 8, в результате чего в блоке 7 запоминается новое текущее значение напряжения тахогенератора 5, что обеспечивает опережение на включение исполнительного органа в предельном цикле и соответствующее уменьшение амплитуды автоколебаний и расхода энергии.
Если принять, что за время импульса τu и за время паузы величины Му и соответственно МТ остаются постоянными, то в предельном цикле при отсутствии внешних возмущений длительность импульса равна

где Uсраб - Uотп определяют ширину петли гистерезиса реле 3, а длительность паузы (при одностороннем предельном цикле) определяется как

Эти соотношения справедливы при вращении КА в соответствии с дифференциальным уравнением

где J - момент инерции КА (гсмсек2),
 - сумма проекций управляющего и возмущающих моментов на ось вращения КА.
- сумма проекций управляющего и возмущающих моментов на ось вращения КА.
Обратно пропорциональная зависимость τu от величины Му обеспечивает в этой системе независимость амплитуды угловой скорости и расхода энергии в предельном цикле от величины управляющего момента.
Максимальная угловая скорость в предельном цикле определяется соотношением

Если на КА действует постоянное внешнее возмущение величиной Мв, то тогда



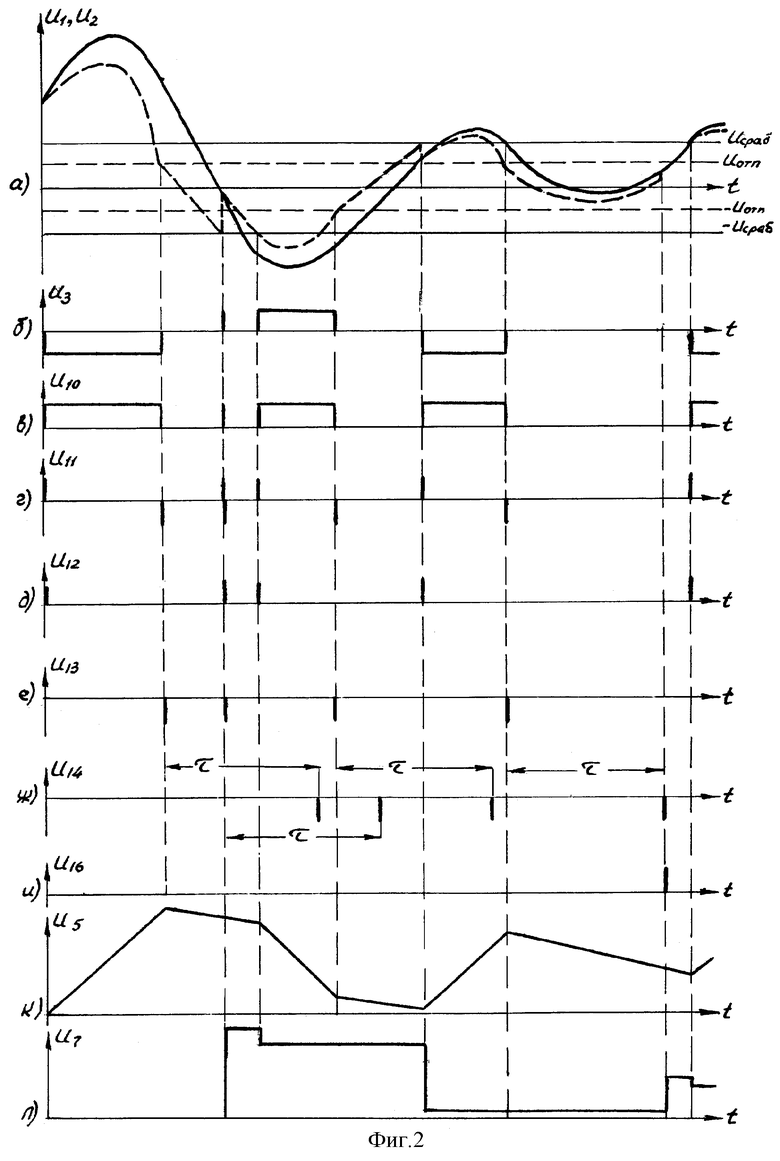
На фиг.2а изображен характерный переходный процесс и установившиеся автоколебания в системе, сплошной линией показана зависимость угловой ошибки от времени, а пунктирной - зависимость напряжения на выходе усилителя-сумматора 2 (на входе реле 3) от времени. Система работает в режиме стабилизации углового положения КА по одной оси в инерциальной системе координат.
На фиг.2б-2л приведены временные диаграммы напряжений на основных блоках системы. Индексы напряжений по оси ординат указывают на номер соответствующего блока.
Блок постоянного запаздывания 14 настраивается на задержку входного импульса на время τ, величина τ выбирается равной примерно (0,5-0,8) времени паузы в предельном цикле.
Как и любая система, в которой используют в качестве исполнительного органа электродвигатель с инерционным ротором и управляют изменением кинетического момента ротора, предлагаемая система должна быть дополнена подсистемой разгрузки электродвигателя. Разгрузка электродвигателя может быть выполнена обычными средствами с использованием газорактивных двигателей, магнитопривода или их комбинации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения асинхронного электродвигателя | 1983 |
|
SU1145437A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Следящая система | 1979 |
|
SU849133A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| Устройство для измерения ускорения вращения | 1988 |
|
SU1571515A1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| Устройство для определения статического момента двигателя | 1991 |
|
SU1789887A1 |
Изобретение относится к области космической техники. Система содержит датчик ориентации, усилитель-сумматор, корректирующее устройство с последовательно соединенными дифференциалом и блоком запаздывания, логические элементы, исполнительный орган с встроенным тахогенератором и нормально разомкнутым ключом. Между ключом и усилителем-сумматором включено запоминающее устройство. Технический результат - повышение точности. 2 ил.
Система управления угловым положением космического аппарата, содержащая датчик ориентации, усилитель-сумматор, корректирующее устройство с последовательно соединенными дифференциатором и блоком запаздывания, логические элементы и исполнительный орган с встроенным тахогенератором и нормально разомкнутым ключом, отличающаяся тем, что, с целью повышения точности работы системы и сокращения расхода рабочего тела, в ней между ключом и усилителем-сумматором включено запоминающее устройство.
| Экспресс-информация "Система автоматического управления", 1965, № 4, стр.18-19. |

