Р1зобретепие относится к технике автоматического управления, г именно к устройствам для управления электропр иводом при экстремально пзменяющемся моменте, нагрузки, например для управления электромеханическим -преобразователем частоты, обеспечиваюп; 1м питание магнитострпкционного электровибробура однофазным напряжением переменной частоты.
Существует ряд устройств - экстремальных регуляторов, которые осуществляют выведение объекта управления в экстремум функций качества.
Беспоиско;вые экстремальные регуляторы 1 обеспечивают исключение автоколебаний системы относительно экстремума.
Однако данные регуляторы не позволяют реализовать пропорциональное управление, что ведет к ограничению быстродействия.
Непрерывный и релейный автоколебательный регулятор 2 ,реалнзует алгоритм управления, что обеспечивает высокое быстродействие. Он содержит непреРЫВ.НОГО контроля изменения скорости, состоящий .из индикатора знака скорости, вход которого подключен к датчику скорости, а выход - к логическому органу, а также канал контроля изменения параметра показателя качества управления, состоящии ИЗ суммаюра. вход которого подключен к датчику контролируемого сигнала, а выход - к входу фазочувствителыюго усиллтеля, выход которого через блок определения знака контролируемого сигнала иодсоединен к уиомянутому логическому органу.
Указанный регулятор наиболее блнзок к описываемому Изобретению.
10
Однако он имеет суи;ественпые недостатки, а именно: низкую помехозащищенность, нал.ичне автоколебаний относительно экстремума, амплИтуда которых зависит не только от настройкп элементов .регу15лятора и динамичес1шх свойств системы, но и от вида функции качества.
Цель изобретения - создалпгс такого регулятора, который бы обеопеЧ|Ивал высокое быстродействие системы и исключал ее
20 автоколебания относительно экстремума отс тствии Бнеииних возмущений. Достижение этой пели способствует повышению точности системы и ее помехозащищенности при уменьщенпи потерь па поиск и
25 исключении потерь ,на рысканля.
Указанная цель достигается тем, что фазочувствительный усилитель выполнен д.вухлороговым, второй выход которого соединен с одним входом ключа комм та30цпи через интегрирующий элемент, причем
указанный усилитель заипнтирозаг; вторым .иктегрирующим элементом, осущсст:;ля10щим отрицательную обратную связь, а ;ггорой вход ключа коммутации соедшкч; с зыходом логического органа.
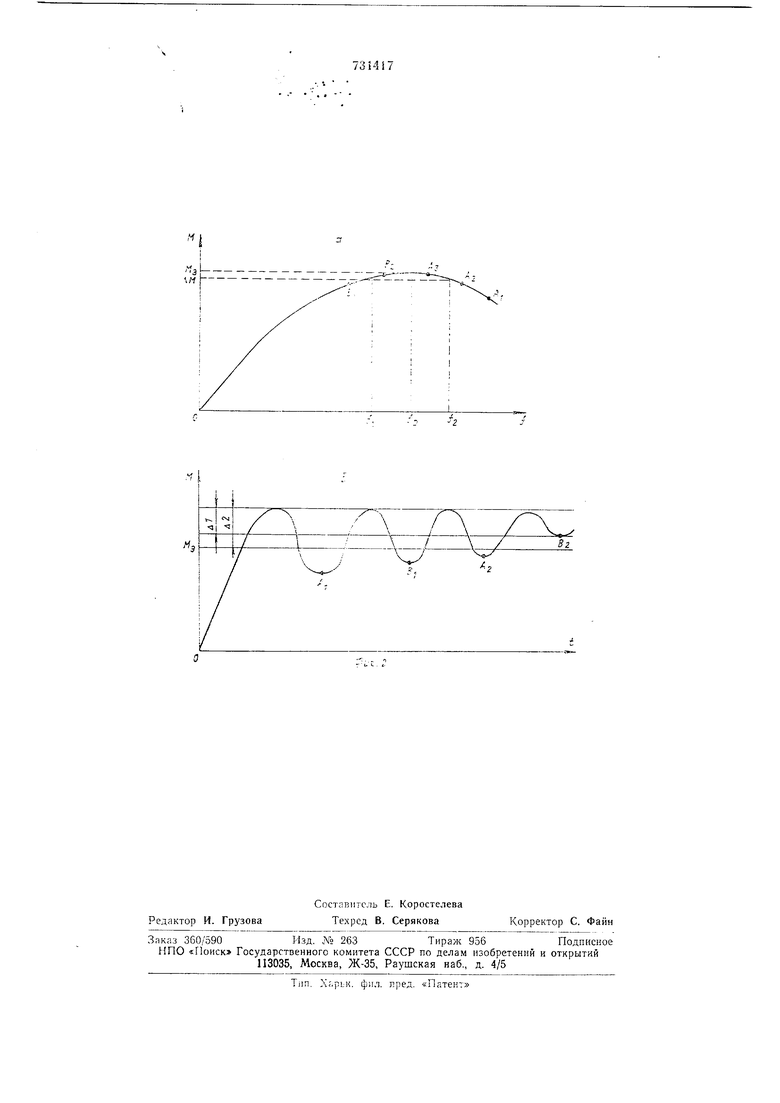
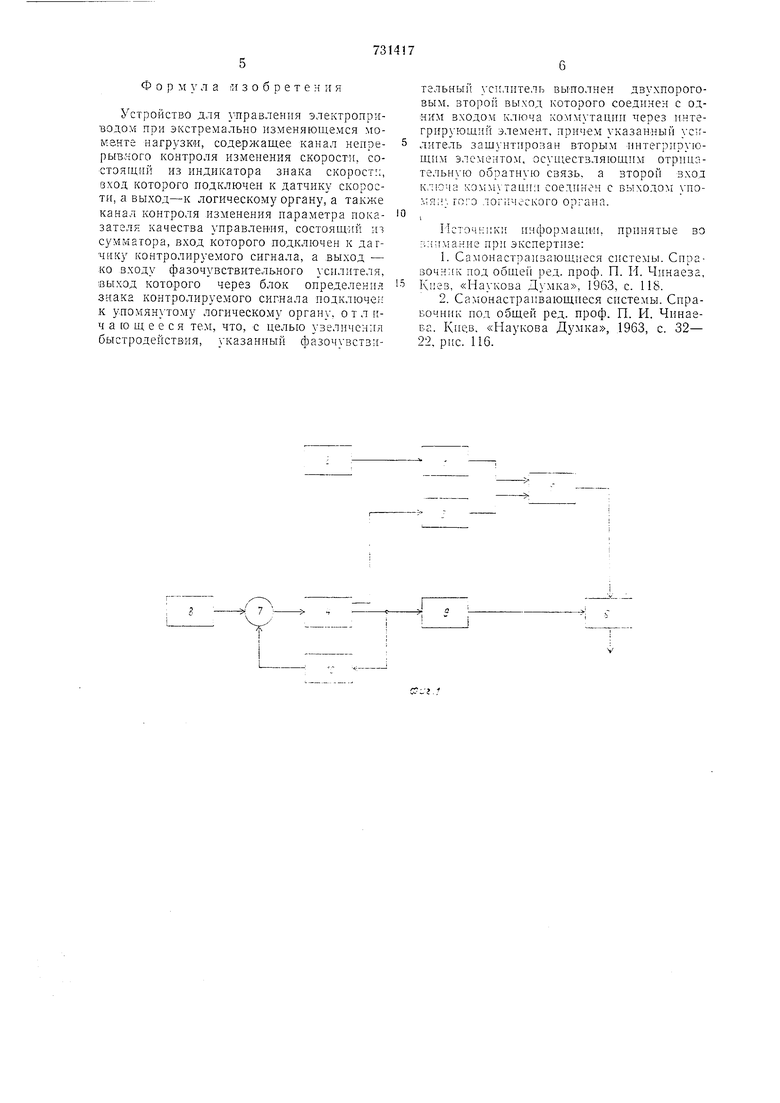
Ма фиг. 1 ириведена блок-схема предлагае.мого устройства; на фиг. 2, а, б иредставлены граф|ики. пояср Я10и1ие иринцип работы системы: M F(f) и (), где М - момент двигателя; / - частот; иитаюuiero .иаяряженпя.
Устройство содержит канал имиудьсного регулнрОВаНня, включающий з-аковын инднкато.р / скорости, к входу которого подсоедине; зы.ход датчика 2 скорости, з;{аковый элемент Sign Ai 3, вход ivOTOporo соединен с выходом двухзониого фазочузстзительиого усилителя 4 и логический оргаи 5, входы которого иодключены к выходам индикатора / и датчика 2. Выход догическОГО органа 5 соединен с входом ключа 6. Устройство содерЖИт также канал неирерывиого регулкровгыия, .и меющий орган 7 сравиения, один вход которого сзязал с зыходом .ка 8 момента, а выход - с двухзонным усилителем 4, второй выход кото)0ГО .соединен .с ключом 6 через иерзый интегрирующей элемент 9. Двухзонный усилитель 4 за1шунтирован вторым интеrpHpyiouuiM элементом 10, осуществляюЩим обратную отрицательную связь.
Фазочувствительный усилитель имеет зоны нечувствительности Л1 и Л2, нричем
: А 1 ;А2 .
Устройство работает следуюни1м обра3 о м.
При неподв,ижном двигателе электропривода выходные сигналы индикатора / и элемента 9 равны нулю. При ноявлеини сигнала с датчика 2 скоростн, ностуиаюн1его на канал .импульсного 1ег лирова:п и, двигатель р.аскручивается, иризодя з дейетвие электрический генератор.
На вход знавдвого индикатора / скорости noiCTynacT сиги-ал с датчика 2 екорости, а с выхода индикатора / на вход логического органа 5 проходит сигнал о знаке Лриращеиия скорости. Одновременно с этим увел.Нчивается выходной сигнал датчнка 8 момента, поступающий на вход органа 7 сравнения. Как только выходной сигнал с органа сравнения, ,равный разности выходных сигналов датчика 8 момента и интегрирующего элемента 10, превысит зону нечувствительности А1, двухзонный усилитель 4 через .второй свой выход воздействует на интегрирующие элементы 9 и 10, увеличивая их выходные сигналы, а следовательно, и сигиалы ,на входе индикатора / и органа 7 сравнения. По достижении минимальной скорости двигателя, скорость изменения сигнала датчика 8 увеличивается настолько, что входной сигнал усилителя 4 иревьь
пает вторую зону чувствительности А2. В этот MOMeiiT срабатывает знаковый элемент Sign Л 3 и ;;а второй вход органа 5 иоетунает сшнал о ириращешя момента М.
Логика работьг логического органа 5 представленс з таблице.
+ О
Из таблицы видно, чти ири двух иоложительных сигналах на входе логический оргаи 5 выдает выходной снгиал ;ia ключ 6. При этом на вход блока унравления скоростью Подается максимальный управляющцй сигнал, что является реализацией нмнульс1-;ого регулп;ювания.
При подходе момента к точке экстремума скорость нарастания момента у.меньшастся и входной сигнал фазочувствительного усилителя оказывается меньше А2, Sign Л1 и отключается лог ;ческим органом 5, В связи с чем на блок унравлспия скоростью иодается управляюпшй сигпал, меиьша1й чем максимальный.
Как только сигнал на в.ходе фазочувствнтельного усилителя становится меньше А, то фиксируется сигнал датчика 2 скорости и сигнал с ннтегпирующего элемента 10.
Однако в силу инерции система переходит через экстремум, пр.и этом величина момента пачи:нает уменьшаться. Когда выходной сигнал фазоч вствительного усилителя 4 повышает зеличИНу А, тогда, уменьшается выходной сигнал.
Наличие и.нерционности в системе обусловливает запаздывание снижения скорости, благода.ря чему сигнал на входе усилителя 4 превышает А2. срабатывает элемент Sign М 3, изменив знак на входе логического органа 5. Уменьшение скорости приводит также к ггзмепению знака на другом входе логического органа 5. Согласно логике работы, логический оргаи выдает команду на ключ 6, который подключает вход блока управления скоростью к максимальному управляющему напряжению обратного знака, что приводит к форсированному торможению. Переключение каналов регулирования осуществляется до тех пор, пока отклонения величины момента ие окажутся стабильно меньще А1. При этом система оказывается в установивщемся резонансном режиме.
Формула изобретен ii я
Устройство для управления электроприводом при экстремально изменяющемся моменте нагрузки, содержащее канал неирерывйого контроля изменения скорости, состоящий из индикатора знака скорост::, вход которого подключен к датчику скорости, а выход-к логическому органу, а также канал контроля изменения параметра показателя качества управления, состоящий из сумматора, вход которого подключен к датчику контролируемого сигнала, а выход - ко входу фазочувствительного усилителя, выход которого через блок определения знака контролируемого сигнала подключен к упомянутому логическому органу, о т л чающееся тем, что, с целью узел 1чен; я быстродейстВИЯ, указанный фазочувстзитгльный усилитель выполнен двухпороговым. второй выход которого соединен с одним входом ключа коммутацпп через интегрирующий элемент, причем указанный усилитель защунтпрозан вторым интегрирующим элементом, осуществляющим отрицательную обратную связь, а второй вход ключа комм таци: соединен с выходом поIicT04H iKi информации, принятые во :;;п мание при экспертизе:
1.Самонастраизающиеся системы. Справочник под общеГ| ред. проф. П. И. Чинаеза, Киев, «Наукова Думка, 1963, с. 118.
2.Самонастраивающиеся системы. Справочник под общей ред. проф. П. И. Чинаевг. Кпе.в. «Наукова Думка, 1963, с. 32- 22, рис. 116.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |