Изобретение относится к автоматизированным системам, системам автоматического управления и может быть использовано при управлении сложными объектами преимущественно с дискретным характером технологического цикла, а также для решения задач распознавания и анализа данных объектов, ситуаций, процессов или явлений произвольной природы, описываемых наборами признаков (симптомов, факторов).
Известно устройство, содержащее первый и второй регистры, первый, второй и третий блоки памяти, схему сравнения, блок элементов И, счетчик адресов, генератор тактовых импульсов, блок управления [1].
Недостатком устройства является ограниченная область применения, обусловленная использованием такой идеальной системы классификации, которая задает на исходном множестве полных ситуаций его разбиение на классы эквивалентности ситуаций. При описании сложных реальных объектов управления найти разбиение полных ситуаций их представления на классы эквивалентности, как правило, не представляется возможным ввиду размытости границ классификаций.
Известно также устройство, содержащее регистр ввода, N регистров вывода, N блоков элементов И, N блоков сравнения, три группы из N блоков памяти, N счетчиков адресов, элемент ИЛИ на N входов, блок управления, генератор тактовых импульсов [2].
Недостатком устройства является ограниченная область применения, обусловленная возможностью осуществлять поиск классов толерантности текущих управляющих ситуаций для различных полносвязных пространств толерантности, при этом выбор соответствующих решений (воздействий) остается неоднозначным (неопределенным) даже для однозначно идентифицированных устройством классов толерантности.
Из известных устройств наиболее близким по технической сущности и по совокупности признаков является устройство, содержащее регистр ввода, первый регистр вывода, блок управления, генератор тактовых импульсов, первый блок классификации, который содержит элемент И, три блока памяти, блок сравнения и счетчик адресов, счетный вход которого является счетным входом блока классификации, выходы счетчика адресов соединены с соответствующими входами блоков памяти, выходы первого блока памяти подключены к первой группе входов элемента И, вторая группа входов которого является группой информационных входов блока классификации, группа выходов элемента И соединена с первой группой входов блока сравнения, выход которого является тактовым выходом блока классификации, вторая группа входов блока сравнения соединена с выходами второго блока памяти, выходы третьего блока памяти являются группой информационных выходов блока классификации, причем информационный вход регистра ввода является входом устройства, а выходы соединены соответствующими информационными входами первого блока классификации, тактирующий вход которого соединен с соответствующим тактирующим входом первой группы входов блока управления, вход синхронизации которого соединен с выходом генератора тактовых импульсов, информационные выходы первого блока классификации соединены соответственно с информационными входами первого регистра вывода, выходы которого являются первыми выходами устройства, счетный вход первого блока классификации соединен с соответствующим выходом первой группы блока управления, выходы второй группы которого соединены с соответствующими тактовыми входами первого регистра вывода [3].
Недостатком устройства является ограниченная область применения, обусловленная возможностью осуществлять поиск классов толерантности текущих управляющих ситуаций только для последовательно-сопряженных (линейно-сопряженных) пространств толерантности.
Цель изобретения - расширение области применения устройства за счет реализации возможности осуществлять выбор управляющих решений на множестве различных полносвязных пространств толерантности, сопряженных к линейной структуре.
Поставленная цель достигается тем, что в устройство, содержащее регистр ввода, первый регистр вывода, блок управления, генератор тактовых импульсов, первый блок классификации, который содержит элемент И, три блока памяти, блок сравнения и счетчик адресов, введены группа из N-1 регистров вывода, группа из N-1 блоков классификации, элемент ИЛИ и блок выбора управляющих решений, причем информационные входы блоков классификации группы соединены с соответствующими выходами регистра ввода, тактирующие выходы блоков классификации группы соединены с соответствующими тактирующими входами первой группы входов блока управления, информационные выходы блоков классификации группы соединены соответственно с информационными входами регистров вывода группы, счетные входы блоков классификации группы соединены с соответствующими выходами первой группы блока управления, выходы второй группы которого соединены с соответствующими тактовыми входами регистров вывода группы, входы блока выбора управляющих решений соединены соответственно с тактирующими выходами блоков классификации, выходы блока выбора управляющих решений соединены с тактирующими входами второй группы блока управления, выходы второй группы которого подключены к входам элемента ИЛИ, выход которого соединен с тактовым выходом регистра ввода.
Блок выбора управляющих решений содержит M групп элементов И соответственно на два, три,..., М входов и группу из М элементов ИЛИ на N - M входов, причем каждый i-й вход блока подключен к i-му, (i - 1)-му, (i - 2)-му,..., [i-(M-1)]-му элементу И j-й группы элементов, (где  ), выходы элементов И каждой j-й группы подключены соответственно к i-м входам соответственно i-го элемента ИЛИ, выходы элементов ИЛИ являются выходами блока выбора управляющих решений.
), выходы элементов И каждой j-й группы подключены соответственно к i-м входам соответственно i-го элемента ИЛИ, выходы элементов ИЛИ являются выходами блока выбора управляющих решений.
Блок управления содержит группу из N элементов ИЛИ, две группы по N элементов и группу из N элементов ЗАПРЕТ на М-1 входов, причем вход синхронизации блока подключен к первым входам элементов ИЛИ и элементов И первой и второй групп, а тактирующие входы первой группы подключены соответственно к вторым входам элементов И первой группы и элементов ИЛИ, выходы элементов ИЛИ группы подключены соответственно к вторым входам элементов И второй группы, выходы которых являются выходами первой группы блока, выходы элементов И первой группы подключены к разрешающим входам соответствующих элементов ЗАПРЕТ, выходы которых являются выходами второй группы блока, каждый i-й ( ) тактирующий вход второй группы блока соединен с запрещающими входами каждого из N элементов ЗАПРЕТ группы, кроме одноименного.
) тактирующий вход второй группы блока соединен с запрещающими входами каждого из N элементов ЗАПРЕТ группы, кроме одноименного.
Введение в устройство дополнительных блоков и связей позволяет реализовать эффективную схему выбора управляющих решений на множестве различных полносвязных структур (пространств толерантности), сопряженных к линейному по характеристическим векторам классов, извлекаемых из блоков памяти и соответствующих им кодов управляющих решений, что существенно расширяет область применения устройства.
На фиг. 1 изображена функциональная схема устройства для ситуационного управления: на фиг. 2 - принятая условная схема классификации и выбора управляющих решений; на фиг. 3 - функциональное построение блока классификации; на фиг. 4 - функциональное построение блока управления; на фиг. 5 - функциональное построение блока выбора управляющих решений.
Устройство (фиг. 1) содержит регистр 1 ввода, блоки 21-2N классификации, регистры 31-3N вывода, элемент ИЛИ 4 на N входов, блок 5 выбора управляющих решений, блок 6 управления и генератор 7 тактовых импульсов.
i-й блок классификации (фиг. 3) содержит i-й элемент И 8i, первый 11i, второй 9i и третий 13i i-е блоки памяти, i-й блок 10i сравнения и i-й счетчик 12i адресов, а также группу информационных входов 11-1J и выходов 11-1J, i-й счетный вход и i-й тактирующий выход.
Блок управления (фиг. 4) содержит первую группу N элементов И 141 - 14N, элементов ИЛИ 151-15N, вторую группу элементов И 161 - 16N и элементов "Запрет" 171 - 17N, а также имеет вход 1, тактирующие группы входов 21 - 2N и 31 -3M и группы выходов 11 - 1N и 21 - 2N.
Блок выбора управляющих решений (фиг. 5) содержит первую группу N-1 элементов И 181 - 18N-1 на два входа, вторую группу N-2 элементов И 191 - 19N-2 на три входа,..., M-ю группу N-M элементов И 201 - 20N-M на M+1 входов, M элементов ИЛИ 211 - 21M на M входов, а также имеет группу входов 11 - 1N и группу выходов 11 - 1M.
Определим множество S всех ситуаций рассматриваемой предметной области на основании знаний о состоянии системы управления, знаний о технологии управления, а также сведений о структуре объекта управления и его функционирования. В общем случае, множество полных ситуаций S - это множество, включающее все принципиально возможные (текущие) ситуации St, St ∈ S об объекте управления и о самой системе управления (Поспелов Д.А. Ситуационное управление. Теория и практика. М.: Наука, 1988, с. 26; Клыков Ю.И. Ситуационное управление большими системами. М.: Энергия, 1974).
Пусть задано некоторое множество ситуаций по представлению сложного объема наблюдения и определена на нем система подмножеств {S1, S2,...SN}, Sj ∈ S,  , которая образует покрытие множества S. Если существует хотя бы пара таких подмножеств Si и Sj, что при i = j Si
, которая образует покрытие множества S. Если существует хотя бы пара таких подмножеств Si и Sj, что при i = j Si Sj ≠ ⊘ ,
Sj ≠ ⊘ ,  Sj = S, то подмножества Sj называются классами толерантности ситуаций.
Sj = S, то подмножества Sj называются классами толерантности ситуаций.
Представление классов толерантности ST в виде характеристических (собственных) векторов для всего многообразия описываемых объектов и явлений определяется в общем случае видом толерантности, т.е. характером (особенностью) покрытия исходного множества S. Характер покрытия множества S зависит от вида (класса) структур (пространств толерантности), используемых для описания и представления исследуемой предметной области.
Одной из наиболее распространенных базовых структур толерантности (пространств толерантности), встречающихся в природе, являются так называемые полносвязные структуры. Практическое приложение использования подобных структур, например для области инфрмационно-вычислительных сетей, применяется при описании полносвязных структур по принципу "каждый с каждым" (Братухин П.И. и др. Основы построения больших информационно-вычислительных сетей. Изд. Статистика, 1976).
Для классов толерантности ST с полносвязной структурой, которую схематично для двумерного случая представим в виде фиг. 2, представляется целесообразным выделить следующие классы толерантности Sт = {<S
Характеристическими векторами класса Sj называется пара векторов hi и qj (соответственно прямой и обратный) таких, что выполняются соотношения: ,
,
где St - двоичный вектор t-й текущей ситуации класса S
Характеристическими векторами класса S ,
,
где St - двоичный вектор t-й ситуации класса S
Характеристическими векторами класса S ,
,
где St - двоичный вектор t-й ситуации класса S
Условие принадлежности ситуации St к соответствующему классу толерантности ST с целью идентификации истинного состояния в общем случае описывается следующим логическим выражением: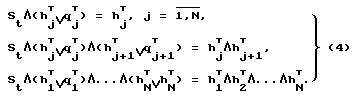 .
.
Условие (4), с учетом предложенного алгоритма поиска классов толерантности текущих управляющих ситуаций для полносвязных структур, может быть представлено следующим образом.
1 вариант. Ситуация St принадлежит классу  в том случае, если код ситуации St имеет единицы во всех разрядах, в которых единицы имеет h
в том случае, если код ситуации St имеет единицы во всех разрядах, в которых единицы имеет h
2 вариант. Ситуация St принадлежит классу S
 .
.
3 вариант. Ситуация принадлежит классу S1,...,N в том случае, если код ситуации St имеет единицы во всех разрядах, в которых единицы имеет h
 .
.
Во втором и третьем вариантах представления ситуаций, несмотря на однозначность идентификации классов толерантности, возникает неопределенность в выборе соответствующего управляющего решения, так как в соответствии с логикой представления классов толерантности  получается, что любой элемент этого пересечения одновременно индуцирует два различных решения Rj и Rj+1.
получается, что любой элемент этого пересечения одновременно индуцирует два различных решения Rj и Rj+1.
Для обеспечения определенности в выборе управляющих решений на множестве различных полносвязных пространств толерантности для второго варианта представления ситуаций (5) предлагается следующий алгоритм выбора управляющих решений, который представим в виде: ,
,
где знак _→ условно означает переход от одной альтернативы (множества ситуаций, класса, варианта решения, ...) к последующей, как правило, вложенной в предыдущую.
Аналогично, обобщая алгоритм выбора управляющих решений на множестве полносвязных пространств толерантности для третьего варианта представления ситуаций (6), получим: .
.
Реализация алгоритмов (7) и (8) позволяет разрешить неопределенность путем выбора из группы анализируемых решений (альтернатив) минимального по индексу (номеру) следования (т.е. первого в группе) управляющего решения.
Разрешая неопределенность путем выбора из группы анализируемых решений максимального по индексу следования управляющего решения, предложим следующий алгоритм: .
.
Смысл предложенного подхода разрешения неопределенности заключается в том, что из группы рассматриваемых (допустимых) альтернатив, определенных на множестве полносвязных пространств толерантности, сопряженных к линейному и допустимых для конкретной анализируемой управляющей ситуации (класс ситуаций), выбирается, с учетом априорных знаний, специфики предметной области одна из крайних (экстремальных) альтернатив.
Двоичный вектор (код ситуации St) от объекта управления, например, с группы двоичных датчиков, установленных на объекте, поступает на информационные входы регистра 1 ввода. В момент окончания поиска предыдущего класса ситуации ST на входах 21 - 2N (или на одном из них) блока 5 управления появляется сигнал с уровнем логической единицы с блоков 21 -2N (или одного из них) классификации, открывающий элементы И 141 - 14N (или один из них) в блоке управления. По заднему фронту очередного импульса от генератора 7 происходит запись кода оцененной (идентифицированной) ситуации с блоков 21 - 2N (или одного из них) в регистры 31 - 3N вывода (или одного из них) и кода текущей ситуации St в регистр 1 ввода. Если класс кода текущей ситуации совпадает с классом кода ситуации, записанной на предыдущем такте, то с блоков 21 - 2N (или одного из них) по-прежнему поступает сигнал с уровнем логической единицы и процесс повторяется, пока не изменится класс текущей ситуации. Все это время в регистрах 31 - 3N вывода (или одном из них) сохраняется прежний код оцененной ситуации.
При изменении кода текущей ситуации, меняющего класс ситуации, снимается логическая единица с входов 21 - 2N (или одного из них) блока 6, запираются элементы И 141 - 14N (или один из них), прекращая запись информации в регистр 1 ввода и регистры 31 -3N вывода (или одного из них), а по заднему фронту сигнала на выходах 11 - 1N (или одном из них) блока 6, формируемых элементами ИЛИ 151 - 15N и элементами И 161 - 16N (или одном из них), наращивается на единицу содержимое счетчиков 121 - 12N (или одного из них). Далее по заднему фронту импульсов генератора 7, поступающих через элементы И 161 - 16N (или один из них) на выходы 11 -1N блока 6, содержимое счетчиков 121 - 12N (или одного из них) адресов продолжает наращиваться, обеспечивая последовательную выборку информации из первых 111 -11N, вторых 91 - 9N и третьих 131 - 13N блоков памяти (или некоторых из них).
При этом для ситуации класса  из первого, второго и третьего блоков 11j, 9j, 13j памяти выбираются вектор h
из первого, второго и третьего блоков 11j, 9j, 13j памяти выбираются вектор h и код оцененной ситуации S
и код оцененной ситуации S , вектор
, вектор  и коды оцененной ситуации
и коды оцененной ситуации  соответственно. И, наконец, в случае ситуации класса S
соответственно. И, наконец, в случае ситуации класса S соответственно. Вектор f
соответственно. Вектор f
Счетчики 121 - 12N адресов работают циклически, обеспечивая последовательную выборку всех векторов h с вектором h
с вектором h
Выбор управляющего решения для идентифицированного кода ситуации осуществляется в соответствии с алгоритмом (7) - (8) в блоках 5 и 6, конкретная реализация которых для рассматриваемого случая приведена на фиг.4 и 5.
Настройка предлагаемого устройства на конкретную предметную область управления осуществляется заданием для каждой ситуации St, встречающейся при описании объекта управления своего кода (идентификатора) ситуации и соответствующего кода управляющего решения. Эти коды не записываются в память непосредственно, а группируются в классы толерантности в соответствии с принятой схемой классификации и выбора управляющих решений. Для каждой группы (класса) ситуаций вычисляются характеристические векторы: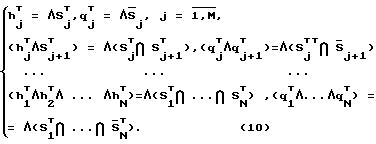
Таким образом, введением в устройство группы из N-1 регистров вывода, группы из N-1 блоков классификации, элемента ИЛИ и блока выбора управляющих решений, включающего M групп элементов И и группу из M элементов ИЛИ, и связей, а также путем изменения блока управления достигается существенное расширение области применения устройства за счет возможности осуществления автоматически выбора управляющих решений на множестве различных полносвязных пространств толерантности, сопряженных к линейной структуре.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| Устройство для классификации управляющих ситуаций | 1990 |
|
SU1742819A1 |
| Устройство нечетко-случайного моделирования сценариев развития ситуации | 2019 |
|
RU2701093C1 |
| Устройство моделирования сценариев развития ситуации | 2016 |
|
RU2637464C1 |
| Ассоциативное управляющее устройство | 1989 |
|
SU1665339A1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2012 |
|
RU2536368C2 |
| АДАПТИВНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1995 |
|
RU2093881C1 |
| Адаптивный классификатор | 1984 |
|
SU1220004A1 |
| ЭКСПЕРТНАЯ СИСТЕМА КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2517422C1 |
| Устройство для ситуационного управления и контроля | 1987 |
|
SU1495818A1 |
Изобретение относится к автоматизированным системам и системам автоматического управления и может быть использовано при управлении сложными объектами преимущественно с дискретным характером технологического цикла, а также для решения задач распознавания и анализа данных объектов, ситуаций, процессов или явлений произвольной природы, описываемых конечными наборами признаков (симптомов, факторов). Устройство содержит регистр ввода, N регистров вывода, генератор тактовых импульсов, элемент ИЛИ на N входов, N блоков классификации, каждый из которых содержит элемент И, три блока памяти, блок сравнения и счетчик адресов, блок управления, содержащий N элементов ИЛИ, две группы по N элементов И и N элементов ЗАПРЕТ на М-1 входов, блок выбора управляющих решений, содержащий М групп элементов И соответственно на два, три, ..., М входов и группу М элементов ИЛИ соответственно на N-M входов. Устройство осуществляет поиск классов толерантности текущих управляющих ситуаций и соответствующих им управляющих решений на множестве полносвязных пространств толерантности, сопряженных к линейной структуре. 2 з.п.ф-лы, 5 ил.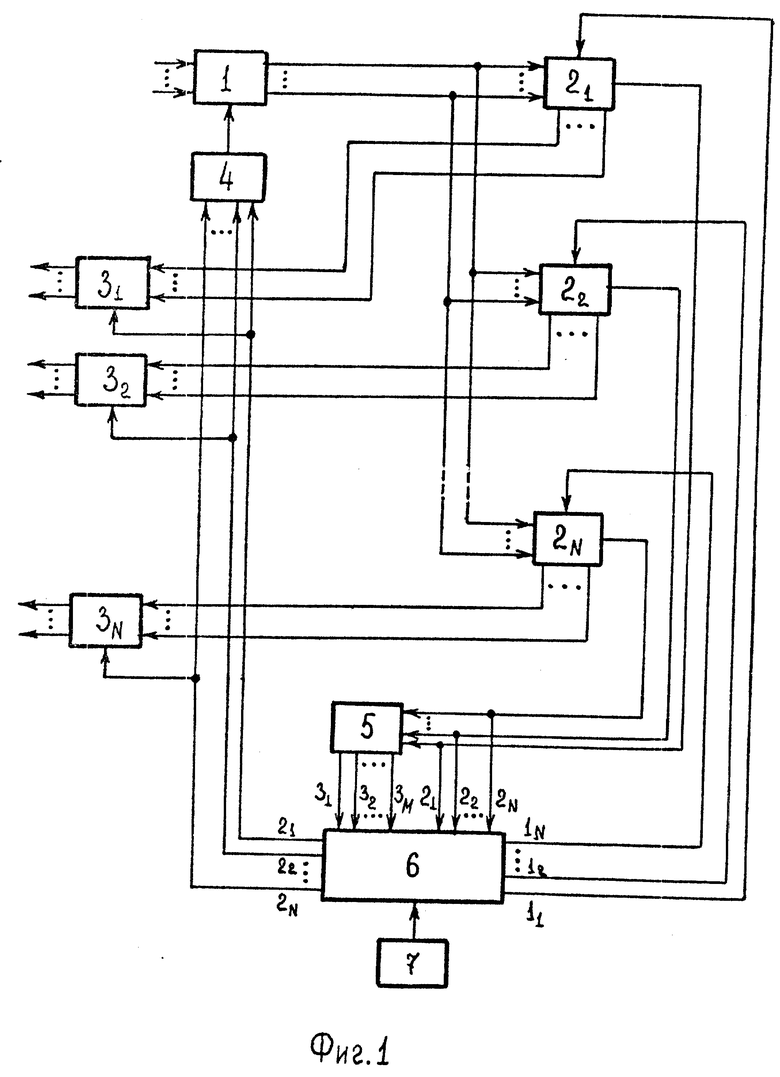
 выходы элементов И каждой j-й группы подключены соответственно к i-ым входам соответственно i-го элемента ИЛИ, выходы элементов ИЛИ являются выходами блока выбора управляющих решений.
выходы элементов И каждой j-й группы подключены соответственно к i-ым входам соответственно i-го элемента ИЛИ, выходы элементов ИЛИ являются выходами блока выбора управляющих решений. тактирующий вход второй группы блока соединен с запрещающими входами каждого из N элементов ЗАПРЕТ группы, кроме одноименного.
тактирующий вход второй группы блока соединен с запрещающими входами каждого из N элементов ЗАПРЕТ группы, кроме одноименного.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Братухин П.И | |||
| и др | |||
| Основы построения больших информационно-вычислительных сетей | |||
| - Изд | |||
| "Статистика", 1976 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для ситуационного управления | 1985 |
|
SU1278811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для ситуационного управления | 1988 |
|
SU1599840A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
