Изобретение относится к автоматизированным системам и системам автоматического управления и может быть использовано при управлении сложными объектами преимущественно с дискретным характером технологического цикла, а также для решения задач распознавания и анализа данных объектов, ситуаций, процессов или явлений произвольной природы, описываемых конечными наборами признаков (симптомов, факторов).
Известно устройство, содержащее первый и второй регистры, блок временных интервалов, первый и второй блоки памяти, счетчик адресов, блок сравнения, блок управления, индикатор и генератор импульсов [1] Устройство не позволяет определять класс текущей ситуации по характеристическим векторам классов. Следствием этого является низкое быстродействие поиска различных управляющих воздействий, ограниченность применения.
Известно также устройство, содержащее первый и второй регистры, первый, второй и третий блоки памяти, схему сравнения, блок элементов И, счетчик адресов, генератор тактовых импульсов, блок управления [2]
Недостатком устройства является ограниченная область применения, обусловленная использованием такой идеальной системы классификации, которая задает на исходном множестве полных ситуаций его разбиение на классы эквивалентности ситуаций. При описании сложных реальных объектов классификации найти разбиение полных ситуаций их представления на классы эквивалентности, как правило, не представляется возможным ввиду размытости границ классификаций.
Из известных устройств наиболее близким по технической сущности является устройство, содержащее первый, второй и третий блоки элементов И, первый и второй регистры, первый, второй и третий блоки памяти, первый, второй и третий блоки сравнения, счетчик адресов, генератор импульсов и блок управления, содержащий элемент И и первый, второй и третий элементы ИЛИ, группа информационных входов первого регистра подключена к группе входов кода ситуации устройства, группа выходов второго регистра подключена к группе выходов устройства, группа информационных выходов счетчика адресов подключена к группам адресных входов первого, второго и третьего блоков памяти, первая, вторая и третья группы выходов первого блока памяти подключены соответственно к первой группе входов первого, второго и третьего блоков сравнения, первая, вторая и третья группы выходов второго блока памяти подключены соответственно к второй группе входов первого, второго и третьего блоков элементов И, группа выходов третьего блока памяти подключена к группе информационных входов второго регистра, группа выходов первого регистра соединена с первой группой входов первого, второго и третьего блоков элементов И, группа выходов которых соединена с второй группой входов соответственно первого, второго и третьего блоков сравнения, выход которых соединен соответственно с первым, вторым и третьим входами блока управления, первый выход которого соединен с счетным входом счетчика адресов, второй выход соединен с синхровходами первого и второго регистров, а четвертый вход подключен к выходу генератора тактовых импульсов, причем первым и вторым входами блока управления являются первый и второй входы первого элемента ИЛИ, а третьим входом первый вход второго элемента ИЛИ, второй вход которого соединен с выходом первого элемента ИЛИ, четвертым входом блока управления являются первые входы третьего элемента ИЛИ и элемента И, вторые входы которых соединены с выходом второго элемента ИЛИ, а выходы являются соответственно первым и вторым выходами блока управления [3]
Недостатком устройства является ограниченная область применения, обусловленная возможностью осуществлять поиск классов толерантности текущих управляющих ситуаций и выбор управляющих решений (воздействий) только для сопряженных (линейно-сопряженных) пространств толерантности.
Цель изобретения расширение области применения устройства за счет реализации возможности осуществлять поиск классов толерантности текущих ситуаций и выбор управляющих решений (воздействий) на множестве различных радиальных (узловых) пространств толерантности.
Поставленная цель, достигается тем, что в устройство, содержащее регистр ввода и регистр вывода, блок элементов И, первый, второй и третий блоки памяти, блок сравнения, счетчик адресов, генератор тактовых импульсов, введены второй регистр вывода, второй блок элементов И, четвертый, пятый и шестой блоки памяти, второй блок сравнения, второй счетчик адресов, элементы ИЛИ, блок управления, причем первые входы второго блока элементов И соединены с выходом первого регистра, вторые входы соединены с выходом пятого блока памяти, а выходы соединены с первыми входами второго блока сравнения, вторые входы которого соединены с входами четвертого блока памяти, а выход соединен с вторым тактирующим входом блока управления, выход шестого блока памяти соединен с информационными входами третьего регистра, выход которого является вторым выходом устройства, адресные входы четвертого, пятого и шестого блоков памяти подключены к выходу второго счетчика адресов, управляющий вход которого соединен с вторым выходом блоком управления, управляющие входы второго и третьего регистров соединены с третьим и четвертым выходами блока управления, которые через элемент ИЛИ подключены к управляющему входу первого регистра, блок управления содержит первый и второй элементы И и первый и второй элементы ИЛИ, причем второй синхронизирующий вход блока управления подключен к первым входам первых элементов И и ИЛИ, а третий тактирующий вход -к первым входам вторых элементов И и ИЛИ, первый вход блока управления подключен к вторым входам первого и второго элементов ИЛИ и к вторым входам первого и второго элементов И, выходы первого и второго элементов ИЛИ являются соответственно первым и вторым выходами блока управления, третьим и четвертым выходами которого являются выходы первого и второго элементов И.
Введение в устройство дополнительных блоков и связей позволяет осуществить эффективную схему поиска классов толерантности текущих ситуаций и выбор управляющих решений на множестве различных радиальных структур (пространств толерантности) по характеристическим векторам классов, извлекаемым из блоков памяти, и соответствующих им кодов команд управления.
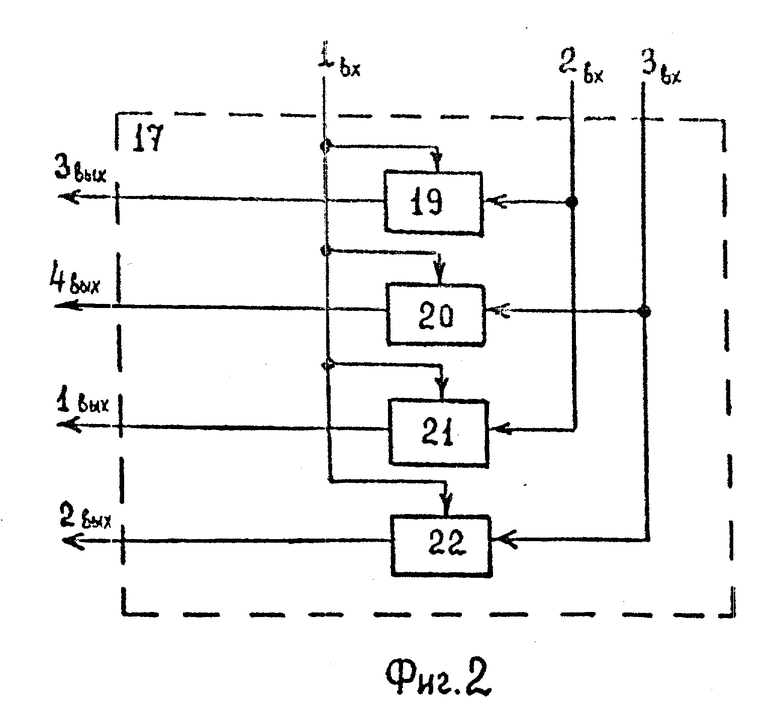
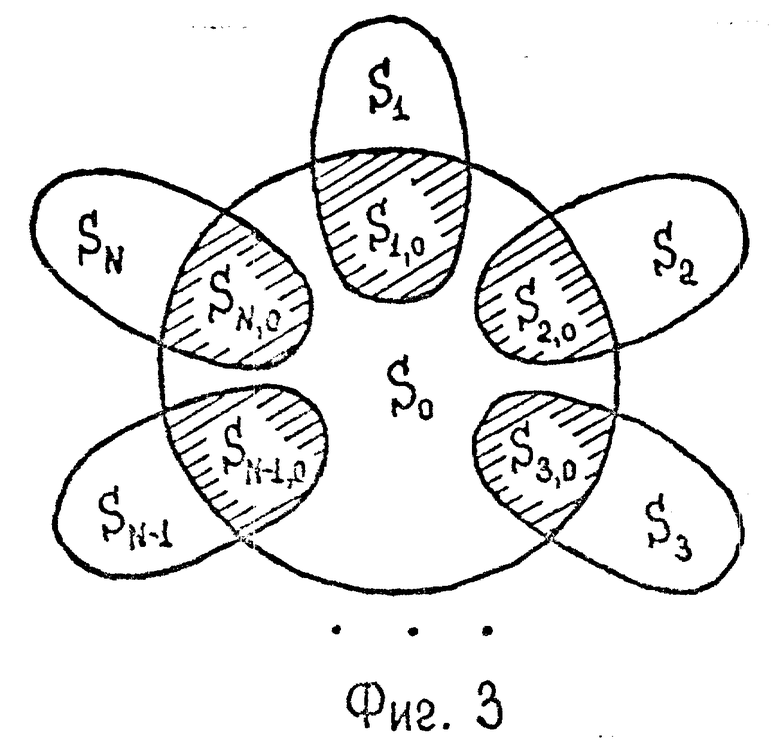
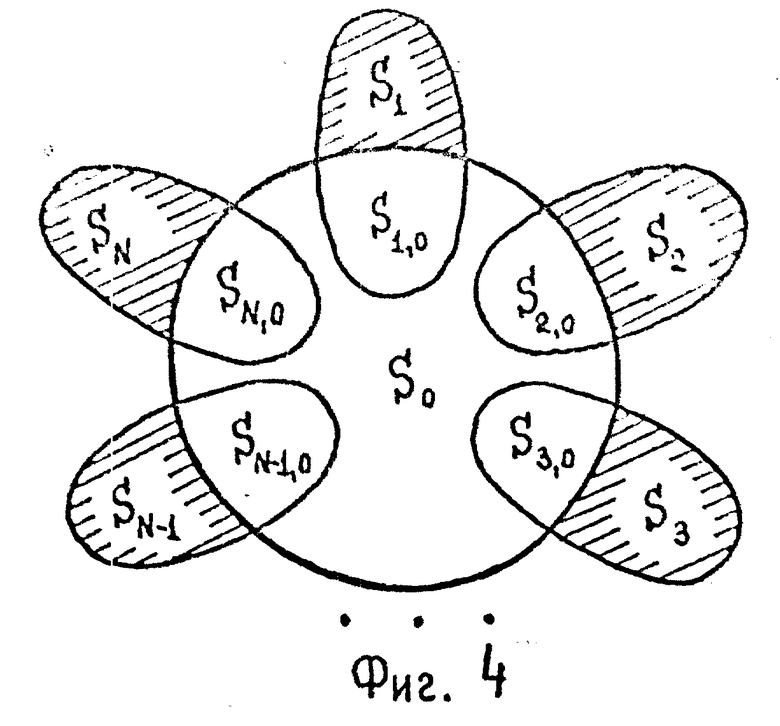
На фиг. 1 изображена функциональная схема устройства для ситуационного управления; на фиг. 2 функциональное построение блока управления; на фиг. 3 принятая условная схема классификации; на фиг. 4 и 5 принятая схема классификации и выбора управляющих воздействий; фиг. 6-8 временные диаграммы работы устройства.
Устройство (фиг. 1) содержит регистр 1 ввода, первый 2 и второй 10 блоки элементов И, первый 5, второй 3, третий 7, четвертый 13, пятый 11 и шестой 15 блоки памяти, первый 4 и второй 12 блоки сравнения, первый 6 и. второй 14 счетчики адресов, первый 8 и второй 16 регистры вывода, элемент ИЛИ 9, блок 17 управления, генератор 18 тактовых импульсов.
Блок 17 управления (фиг. 2) содержит первый 19 и второй 20 элементы И, первый 21 и второй 22 элементы ИЛИ, а также имеет входы 1, 2, 3 и выходы 1, 2, 3, 4.
Определим множество S всех ситуаций рассматриваемой предметной области на основании знаний о состоянии системы управления, знаний о технологии управления, а также всех сведений о структуре объекта управления и его функционирования. В общем случае, множество полных ситуаций S это множество, включающее все принципиально возможные (текущие) ситуации St, St∈S об объекте управления и о самой системе управления. (Поспелов Д.А. Ситуационное управление. Теория и практика. М. Наука, 1988, с. 26; Клыков Ю.И. Ситуационное управление большими системами. М. Энергия, 1974).
Для реальных объектов или явлений окружающего нас мира в чистом виде существование классов эквивалентности, рассмотренных в прототипах, крайне редко. Провести четкую границу между классами не всегда удается, как правило, границы "размыты", т. е. существует между двумя соседними классами такое пространство пересечений (толерантности), когда нельзя однозначно принять решение.
Пусть задано некоторое множество S ситуаций по представлению сложного объекта управления и определена на нем система подмножествS1, S2, SN}  которая образует покрытие множества S. Если существует хотя бы пара таких подмножеств Si и Sj, Si,Sj∈S, iij∈N, что при i ≠ j
которая образует покрытие множества S. Если существует хотя бы пара таких подмножеств Si и Sj, Si,Sj∈S, iij∈N, что при i ≠ j  то подмножества Sj называются классами толерантности ситуаций STSj1, Sj2, Sjn} индуцирующих одинаковое конкретное решение Rj (или Rj V Ri).
то подмножества Sj называются классами толерантности ситуаций STSj1, Sj2, Sjn} индуцирующих одинаковое конкретное решение Rj (или Rj V Ri).
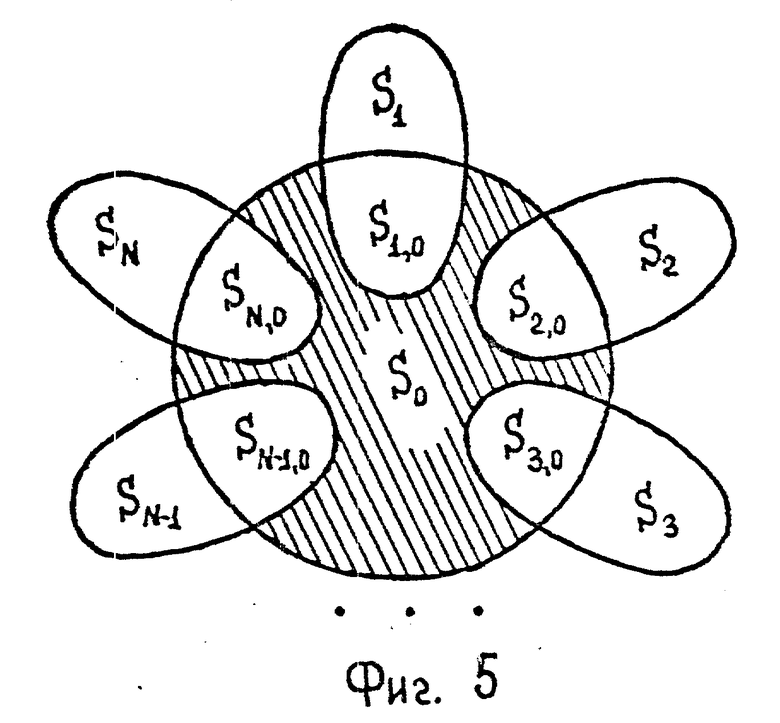
Представление классов толерантности ST в виде характеристических (собственных) векторов для всего многообразия описываемых объектов и явлений определяется в общем случае видом толерантности, т.е. характером (особенностью) покрытия исходного множества S. Характер покрытия множества зависит от вида (класса) структур (пространств) толерантности, используемых для описания и представления исследуемой предметной области. Одной из наиболее распространенных базовых структур толерантности (пространств толерантности), встречающихся в природе, является узловая или радиальная структура. Такие структуры могут представляться, например, в виде пространств толерантности B
Таким образом, пространство B
Практическое приложение использования подобных структур, например, для области информационно-вычислительных сетей (Братухин П.И. и др. Основы построения больших информационно-вычислительных сетей. М. Статистика, 1976 ) применяется при описании узловых (радиальных) структур по принципу "каждый с центром, центр с каждым".
В дальнейшем в качестве основной структуры представления пространств толерантности при классификации управляющих ситуаций в отличиt от прототипа используем так называемые радиальные (узловые) структуры. Для классов толерантности с радиальной структурой, которую схематично для двумерного случая можно представить в виде фиг. 3, характеристическими векторами класса Sт = {S
где St двоичный вектор t-й текущей ситуации класса ST.
Условие принадлежности ситуаций St к соответствующему классу толерантности ST с целью идентификации истинного состояния в общем случае описывается следующим логическим выражением:
Условие (2) с учетом предложенного алгоритма поиска классов толерантности текущих управляющих ситуаций для радиальных структур может быть реализовано следующим образом.
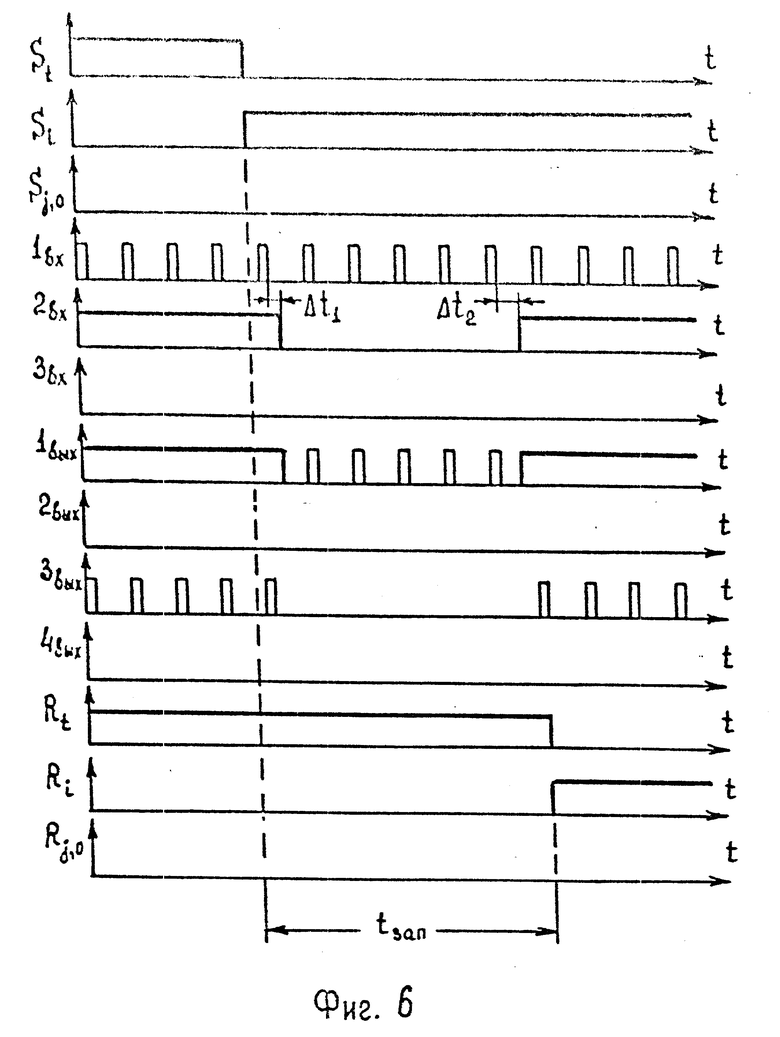
1. Ситуация St принадлежит классу  в том случае (фиг.3, 6), если код ситуации St имеет единицы во всех разрядах, в которых единицы имеет h
в том случае (фиг.3, 6), если код ситуации St имеет единицы во всех разрядах, в которых единицы имеет h
2. Ситуация St принадлежит классу S
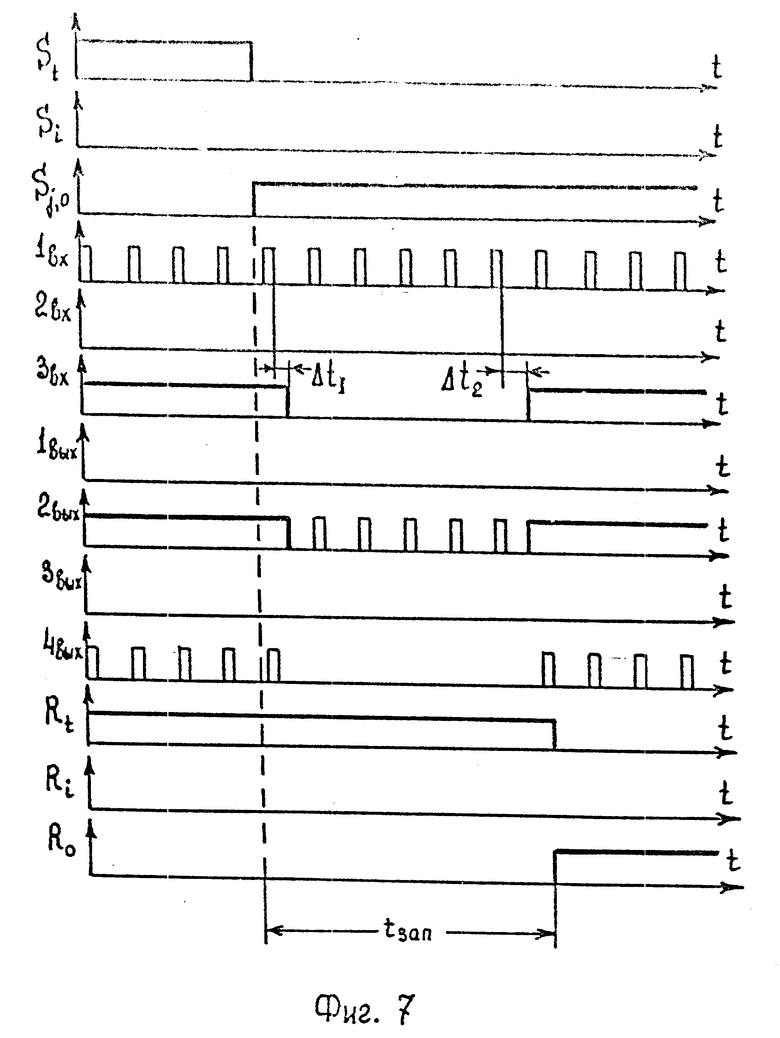
Во втором случае возникает неопределенность в выборе управляющего решения, так как в соответствии с логикой представления классов толерантности  получается, что любой элемент этого пересечения одновременно индуцирует два различных решения Rj и R0. Для обеспечения определенности работы устройства предлагается следующий алгоритм выбора управляющих решений, который представим в виде
получается, что любой элемент этого пересечения одновременно индуцирует два различных решения Rj и R0. Для обеспечения определенности работы устройства предлагается следующий алгоритм выбора управляющих решений, который представим в виде
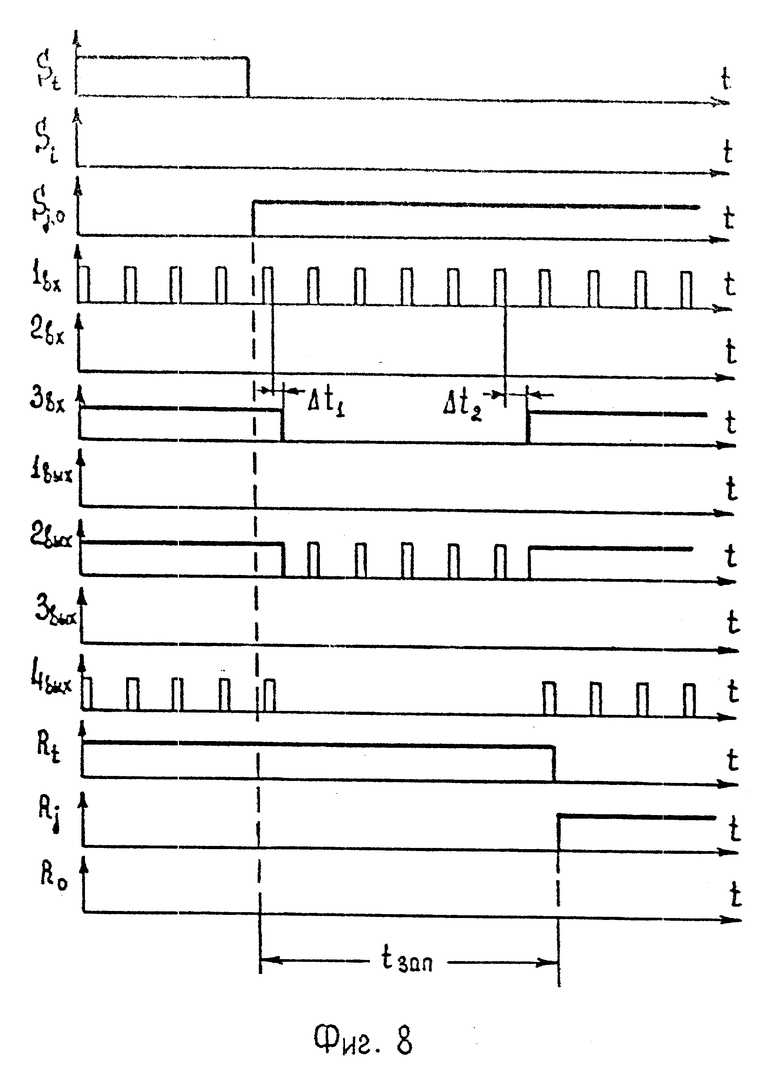
где знак ---> условно означает переход от одной альтернативы (множества, варианта решения,) к последующей. Особенности выбора управляющих решений для соотношений (3) и (4), поясняющие работу устройства, представлены соответственно на фиг.4, 7 и фиг. 5, 8.
Если для любой пары классов Sζ,Sη∈Sт,ζ ≠ η выполняется  или
или  , то класс ситуации может быть однозначно определен из условия (2) без последовательного просмотра всех ситуаций и сразу выдана команда (управляющее решение) на орган управления.
, то класс ситуации может быть однозначно определен из условия (2) без последовательного просмотра всех ситуаций и сразу выдана команда (управляющее решение) на орган управления.
В соответствии с логикой работы устройства ситуационного управления, особенность построения алгоритма поиска выходного решенияR} основывается на такой идее, когда ищется не код конкретной ситуации, а целый класс толерантности, которому принадлежит текущая ситуация. Таким образом, несмотря на большое несчетное количество различных ситуаций  на входе устройства, счетное число распознаваемых классов толерантности
на входе устройства, счетное число распознаваемых классов толерантности  и соответствующих выходных решений
и соответствующих выходных решений  как правило, невелико, т.е. имеет место следующее соотношение
как правило, невелико, т.е. имеет место следующее соотношение  Именно для такого класса объектов управления наиболее целесообразно применять предложенное устройство. Объем памяти блоков 3, 5, 7 (11, 13, 15) определяется мощностью множества
Именно для такого класса объектов управления наиболее целесообразно применять предложенное устройство. Объем памяти блоков 3, 5, 7 (11, 13, 15) определяется мощностью множества  а не изменением множества
а не изменением множества  что резко снижает требования к объему памяти. Если входная ситуация меняется (варьирует) в пределах соответствующего класса толерантности, то блоки памяти выдают единственные конкретные значения, которые идентифицируют этот класс толерантности и соответствующее ему решение. Логика выбора этого класса представлена на фиг. 6-8.
что резко снижает требования к объему памяти. Если входная ситуация меняется (варьирует) в пределах соответствующего класса толерантности, то блоки памяти выдают единственные конкретные значения, которые идентифицируют этот класс толерантности и соответствующее ему решение. Логика выбора этого класса представлена на фиг. 6-8.
Устройство работает следующим образом.
Статистическое состояние устройства после его настройки на реальный объект управления определяется не каким-то фиксированным (исходным) состоянием, а любым (одним из возможных состояний) состоянием, определяемым присутствующим в данный момент на входе устройства значением из множества S, которое осталось после настройки устройства на реальную среду (объект управления). Все возможные состояния на входе устройстваR} жестко связаны (в соответствии с логикой работы алгоритма ситуационного управления) с наличием на входе устройства соответствующего воздействия. Таким образом, состояние устройства при работе с реальным объектом не отличается по сути от состояния устройства в исходном состоянии. Поэтому динамика функционирования устройства после его настройки на реальную среду, не отличается от динамики его функционирования в первоначальном (исходном) состоянии.
Двоичный вектор (код ситуации St) от объекта управления, например с группы двоичных датчиков, установленных на объекте, поступает на информационные входы регистра 1 ввода. В момент окончания поиска предыдущего класса ситуации St на входе 2 (или 3) блока 17 управления появляется сигнал с уровнем логической единицы с блока 4 (или блока 12) сравнения, открывающий элемент И 19 (или 20) в блоке управления. По заднему фронту очередного импульса от генератора 18 происходит запись кода оцененной (идентифицированной) команды управления с блока 7 (или блока 15) памяти в регистр 8 (или 16) ввода и кода текущей ситуации в регистр 1 ввода. Если класс кода текущей ситуации совпадает с классом кода ситуации, записанной на предыдущем такте, то с блока 4 (или блока 12) сравнения по-прежнему поступает сигнал с уровнем логической единицы, и процесс повторяется, пока не изменится класс текущей ситуации. Все это время в регистре 8 (или 16) вывода сохраняется прежний код команды управления.
При изменении кода текущей ситуации, меняющего класс ситуации, снимается логическая единицы с входа 2 (или 3) блока 17, запирается элемент И 19 (или 20), прекращая запись информации в регистр 1 ввода и регистр 8 (или 16) вывода, а по заднему фронту сигнала на выходах 1 (или 2) блока 17 наращивается на единицу содержимое счетчика 6 (или 14). Далее по заднему фронту импульсов генератора 18, поступающих через элементов ИЛИ 21 (или 22) на выходы 1 (или 2) блока 17, содержимое счетчика 6 (или 14) адресов продолжает наращиваться, обеспечивая последовательную выборку информации из первого 5, второго 3 и третьего 7 (или четвертого 13, пятого 11 и шестого 15) блоков памяти. При этом для ситуации класса Si,  из первого 5, второго 3 и третьего 7 блоков памяти выбираются вектор h
из первого 5, второго 3 и третьего 7 блоков памяти выбираются вектор h и код команды управления Ri соответственно. Аналогично в случае ситуации класса
и код команды управления Ri соответственно. Аналогично в случае ситуации класса  из четвертого 13, пятого 11 и шестого 15 блоков памяти выбираются вектор h
из четвертого 13, пятого 11 и шестого 15 блоков памяти выбираются вектор h и код команды управления Rj V R0 соответственно. Вектор
и код команды управления Rj V R0 соответственно. Вектор  поразрядно умножается на вектор текущей ситуации St в блоке 2 (или блоке 10), с выходов которого поступает на второй вход блока 4 (или блока 12), где происходит сравнение полученного вектора с вектором
поразрядно умножается на вектор текущей ситуации St в блоке 2 (или блоке 10), с выходов которого поступает на второй вход блока 4 (или блока 12), где происходит сравнение полученного вектора с вектором  , т.е. определение (идентификация) класса ситуации в соответствии с выражением (2).
, т.е. определение (идентификация) класса ситуации в соответствии с выражением (2).
Счетчики 11 и 14 адресов работают циклически, обеспечивая последовательную выборку всех векторов h с вектором h
с вектором h с вектором h
с вектором h
Быстродействие устройства определяется временем запаздывания команды tзап= (tзап.1, tзап.2), которая является величиной переменной и не превышает tmax= Kт/ν, где KT -количество классов толерантности, ν частота генератора импульсов.
Предельное быстродействие устройства ограничивается задержками Dt1 и Δt2 обусловленными распространением сигналов в блоках 2-5, 7 (или 10-13, 15) и ограничивающих частоту генератора 18 импульсов.
Настройка предлагаемого устройства на реальную среду конкретного объекта управления осуществляется заданием для каждой ситуации St встречающейся при описании динамики поведения объекта управления, своего кода команды управления и определении во втором случае конкретной схемы выбора управляющих решений в пространстве толерантности (фиг. 4,7 или фиг.5, 8). Однако эти коды не записываются в память непосредственно, а группируются в классы толерантности  в соответствии с принятой схемой классификацией. Для каждой группы (класса) ситуаций вычисляются характеристические векторы
в соответствии с принятой схемой классификацией. Для каждой группы (класса) ситуаций вычисляются характеристические векторы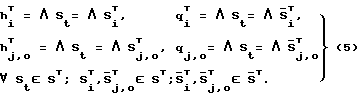
При этом для сложных объектов исследования могут появиться два неразличимых класса  имеющих одинаковые характеристические векторы. В таком случае следует разделить один из классов на два S
имеющих одинаковые характеристические векторы. В таком случае следует разделить один из классов на два S . Если все классы
. Если все классы  различимы, то информация о соответствующих каждому классу векторах
различимы, то информация о соответствующих каждому классу векторах  векторах
векторах  и соответствующих кодах команд управления Ri (Rj,0) заносится в последовательные адреса соответственно первого 5 (четвертого 13), второго 3 (пятого 11) и третьего 7 (шестого 15) блоков памяти. После этого устройство готово к работе.
и соответствующих кодах команд управления Ri (Rj,0) заносится в последовательные адреса соответственно первого 5 (четвертого 13), второго 3 (пятого 11) и третьего 7 (шестого 15) блоков памяти. После этого устройство готово к работе.
Таким образом, в результате введения дополнительных блоков памяти, регистра, блоков элемента И, блока сравнения, счетчика адресов, элемента ИЛИ и связей, а также путем изменения блока управления достигается существенное расширение области применения устройства за счет возможности осуществлять поиск классов толерантности текущих ситуаций и выбор управляющих решений на множестве различных радиальных пространств толерантности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2105343C1 |
| Устройство для классификации управляющих ситуаций | 1990 |
|
SU1742819A1 |
| АДАПТИВНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1995 |
|
RU2093881C1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2012 |
|
RU2536368C2 |
| Ассоциативное управляющее устройство | 1989 |
|
SU1665339A1 |
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |
| Устройство для управления дискретными процессами | 1986 |
|
SU1399701A1 |
| Устройство для ситуационного управления и контроля | 1987 |
|
SU1495818A1 |
| Устройство нечетко-случайного моделирования сценариев развития ситуации | 2019 |
|
RU2701093C1 |
| Устройство для ситуационного управления | 1985 |
|
SU1278811A1 |
Изобретение относится к автоматизированным системам и системам автоматического управления и может быть использовано при управлении сложными объектами преимущественно с дискретным характером технологического цикла, а также для решения задач распознавания и анализа данных объектов, ситуаций, процессов или явлений произвольной природы, описываемых конечными наборами признаков (симптомов, факторов). Цель изобретения - расширение области применения устройства за счет реализации возможности осуществлять поиск классов толерантности текущих ситуаций и выбор соответствующих управляющих решений (воздействий) радиальных (узловых) пространств толерантности. Устройство содержит три регистра, два блока элементов И, два блока сравнения, шесть блоков памяти, два счетчика адресов, генератор тактовых импульсов, элемент ИЛИ и блок управления, содержащий два элемента И и два элемента ИЛИ. Устройство осуществляет целенаправленный поиск классов толерантности текущих ситуаций и выбор соответствующих управляющих решений для различных радиальных структур по характеристическим векторам классов, последовательно извлекаемым из блоков памяти, и выдает на выходе код команды управления, соответствующий найденному классу, что позволяет достичь поставленную цель. 1 з.п. ф-лы, 8 ил.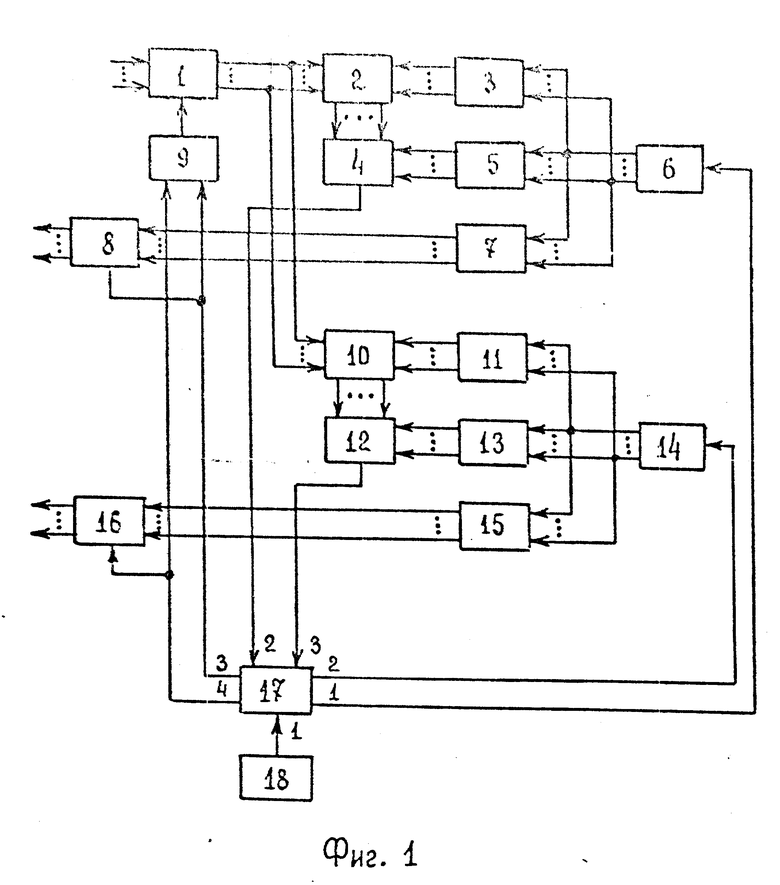
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1089550, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1278811, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1599840, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
