samymtm foS Kaf irtSti
г
I
г ||i-ц I I
to
рй-.
i Г
сд
I I
W О f -if - .- г ,f
рй-.
. t Е

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |
| Устройство для контроля динамики управляемых процессов цифровых систем | 1987 |
|
SU1444827A1 |
| Устройство для контроля ситуационной динамики сложных технических объектов | 1987 |
|
SU1481799A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ | 1992 |
|
RU2041494C1 |
| Устройство для ситуационного управления | 1985 |
|
SU1278811A1 |
| Устройство для комбинационно-логического управления сложными системами | 1987 |
|
SU1539775A1 |
| Устройство для управления дискретными процессами | 1986 |
|
SU1399701A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| Устройство для иерархического ситуационного управления | 1989 |
|
SU1725185A1 |
Изобретение относится к автоматическому управлению и контролю и может быть использовано в системах управления сложными техническими системами. Целью изобретения является повышение быстродействия и надежности устройства. Устройство содержит регистры 1 входной информации, регистры 2 выходной информации и регистры 3 памяти кода ситуации, блоки 4, 5,6 памяти, блоки 7,8 сравнения, блоки 9,10 элементов И, регистр 11 последовательных приближений, генератор 12 тактовых импульсов и блок 13 управления. Раскрыта также структура блока управления. Повышение быстродействия устройства связано с исключением полного перебора всевозможных кодов ситуаций, хранящихся в памяти, а повышение надежности обусловлено невозможностью "зацикливания" устройства при появлении на его входе кода, не предусмотренного заранее. 1 з.п. ф-лы, 3 ил.
jjis-aL,t р..™.
I .С ,
||...„„
,t р..™.
,
||...„„
tf
Изобретение относится к автомати- ческому управлению, контролю и сигнализации и может быть использовано в системах управления сложными техническими системами и комплексами с преимущественно дискретным характером технологического цикла.
Целью изобретения является повьше- ние быстродействия и надежности устройства.
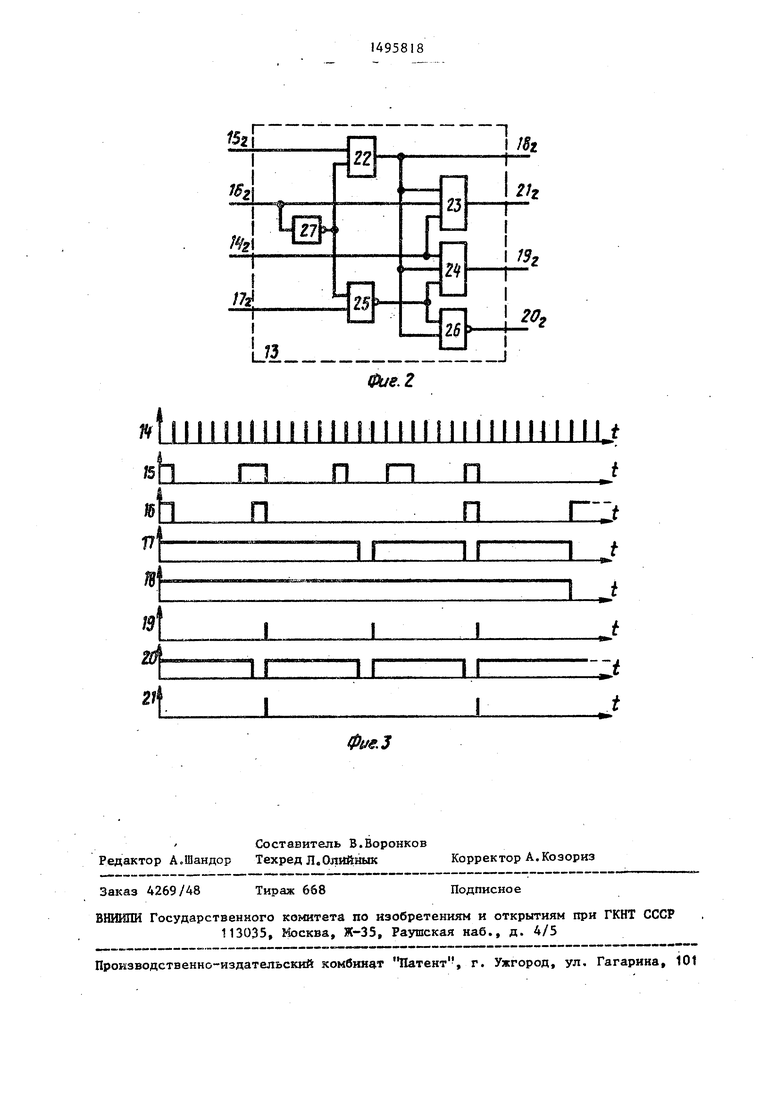
На фиг.1 приведена функциональная схема устройства; на фиг.2 - блок управления J на фиг,3 - временные диагpaMMbt, пояснякщие работу устройства. 5 (условие соответствия реализовавшихI Устройство содержит регистры входIной информации 1, выходной информации
I2 и памяти кода ситуации 3, первый 4,
jвторой 5 и третий 6 блоки памяти,
Iпервый 7 и второй 8 блоки сравнения,
Iпервый 9 и второй 10 блоки элемен тов и, регистр последовательных при-
:блинений 11, генератор 12 тактовых
ся ситуадионньк переходов S.,- S| допустимым) может быть описано логическим выражением
b i(s) I Q(f) D(;.,)-fQ(Pt).(2
Данное условие можно сформулировать следующим образом: переход является недопустимым, если из ситуации Я j.; при реализации команды упимпульсов и блок 13 управления. Входы
и выхода блока 13 обозначены позиция-J25 равления ) управляемая система
ми 14-21 .
Блок 13 управления содержит элемент ИЛИ 22, первый 23 и второй 24 элементы И, первый 25 и второй 26
перешла в такую ситуацию S t, что изменился хотя бы один из разрядов кода ситуации D(S,), определяемых переходным инвариантом Q(r),). Нарушение условия (2) свидетельствует с непредусмотренной реакции системы на формируемые устройством команды. Дальнейшая работа устройства при этом должна быть блокирована.
элементы И-тНЕ и элемент НЕ 27.
Устройство позволяет реализовать ситуационный алгоритм управления, представляемый в виде функционального отображения А 2 D - R - код ситуации - код команды управления. Для этого необходимо для каждой информационной ситуации S., встречающейся в технологическом цикле управляемой системы и однозначно определяемой кодом ситуации R(r.), определить код требуемой в данной ситуации команды управления R(Sj). Адекватность реакции системы на реализуемые комайды контролируется по переходному инва;- фианту ситуации Q(F;). Реакция слож- ной системы на формируемые управляю- 1щие воздействия имеет недетерминированный характер, и определить, какая ситуация возникнет на следующем этапе, если в текущей ситуации R реализована команда управления с кодом R() обычно можно лишь с точностью до некоторого подмножества PCSj) мю- жества; допустимых ситуаций S л%} Дпя каждой ситуации S S множество, P(fi ,) может быть определено заранее на основе изучения технологии управления и ситуационной динамики конкретного объекта управления. Переходным инвариантом ситуации 5ц называется двоичный вектор Q-CSj), получаемый в соответствии с выражением
Q(Si) (fD(S,))V«:iXR), I ,-ep(s,-)vs s.) (1)
Как следует из (1), вектор n(Sj) содержит единицы во всех тех разрядах, которые совпадают для всех векторов D(f)p, таких, что В- eP(S.). -- г. Q помощью переходного
либо S.
инварианта Q(r.|) необходимое условие
корректности ситуационной динамики
ся ситуадионньк переходов S.,- S| допустимым) может быть описано логическим выражением
i(s) I Q(f) D(;.,)-fQ(Pt).(2)
Данное условие можно сформулировать следующим образом: переход является недопустимым, если из ситуации Я j.; при реализации команды управления ) управляемая система
перешла в такую ситуацию S t, что изменился хотя бы один из разрядов кода ситуации D(S,), определяемых переходным инвариантом Q(r),). Нарушение условия (2) свидетельствует с непредусмотренной реакции системы на формируемые устройством команды. Дальнейшая работа устройства при этом должна быть блокирована.
Настройка устройства на операционную среду конкретного объекта управления заключается таким образом, в определении для каждой информационной ситуации S., встречающейся в технологическом цикле данного объекта, тройки двоичных векторов D(.). R({) и Q(S .) и занесении их по последовательным адресам соответственно первого 4,- второго 5 и третьего 6 блоков памяти строго в порядке возрастания кодЪв ситуаций D(Sj).
Устройство работает следующим образом.
Двоичньй вектор (код текущей ситуации) D(S) от объекта управления поступает на входы разрядов регистра 1ь В момент окончания поиска предыдущей команды управления R(S .,) на выходе Равно блока 7 появляется сигнал единичного уровня (коды ситуаций D(S4j.,) и D(S.), поступающие на входы первого блока сравнения 7 с выходов соответственно регистра 1 и блока памяти 4, совпадают), Если
514
сигнал на выходе блока 8 имеет при этом также уровень логической единицы, то На третьем командном выходе блока 13 появляется сигнал нулевого уровня, поступающий на стартовый вход регистра П, и очередной тактовый импульс, поступающий на вход синхронизации регистра последовательных приближений, и через открытые первьш 23 и второй 24 элементы И блока I3 - на входы синхронизации регистров 1-3, сбрасывает в исходное состояние регистр 1 1 последовательных приближений и обеспечивает запись кода текущей ситуации D(S) с входов устройства в регистр 1, запись кода найденной команды R(S j) в регистр 2 и запоминание кода предшествующей ситуации D(S .i) в регистре 3. Тем самым ини- циируетсл новый цикл поиска.
В цикле поиска в начальный момент времени в регистре 11 находится К- разрядный двоичный код 011 ... 1, по которому из блока 4 памяти выбирает- ся код ситуации D(rij), размащенньй по данному адресу, из блока памяти 5 - код команды управления R(Sj), соответствующий данной ситуации, а из блока 6 - переходньш инвариант ситуа- ции Q(S j) . Если при этом D(S)D(Sj) то на выходе Больше первого блока 7 сравнения формируется сигнал единичного уровня. Этот сигнал, являющийся, по существу, значением старшего раз- ряда адреса искомого управляющего кода RCS), поступает на вход ввода данных регистра 11 последовательных приближений и очередным тактовым импульсом заносится в старший разряд. Одновременно следующий тадщий разряд регистра устанавливается в нуль. Следующим тактовым импульсом сигнал с входа ввода данных заносится уже в этот младший разряд, и сбрасывается в нуль следующий за ним и т.д., пока не будут сформированы все К разрядов адреса или не будет найден код ситуации D(S j) , совпадающий с кодом текущей ситуации D(S). Если в какой-то момент такой код найден, т.е. D(S .) D(S), и выполняется условие корректности ситуационной динамики (2)
т.е. коды на выходах первого 9 и второго 10 блоков элементов И совпа- дают , то на выходе Равно первого и выходе второго блоков сравнения вновь сформируются сигналы единичного уровня, инициируя тем самым очередной цикл поиска. Если же (в результате сбоев или помех) в регистр бьт принят код ситуации D(St), не предусмотренный в технологическом цикле управляемой cиcтe iы, то в момент окончания поиска (в ьюмент появления сигнала нулевого уровня на выходе конца преобразования регистра 1 последовательных приближений D(S ;) D(S,), а следовательно, на втором информационном входе блока управления сигнал имеет нулевой уровень.
При этом сигнал нулевого уровня на третьем командном выходе блока 13 управления также сформируется, однако тактовый импульс поступит на вход синхронизации только регистра 1 (второй элемент IJ 24 в блоке 13 управления остается закрытым). Поэтому ко-, манда управления R(S ;) в этом случае не формируется, код ситуации D(S,) не запоминается, а лишь обновляется код текущей ситуации 0(5.) в регист- р1е 1 и сбрасывается в исходное сос тонкие регистр 11, обеспечивая повторение данного цикла поиска.
В случае же, когда код D(S) I(S) найден, но необходимое условие корректности ситуационной динамики (2) не выполняется (коды на выходах первого 9 и второго 10 блоков элементов И не совпадают), то на первом командном выходе блока 13 формируется сигнал нулевого уровня, блокирующий дальнейшую работу устройства. Наличие логического нуля на контрольном выходе устройства сигнализирует о том, что реакция управляемой системы на последнюю сформированную команду отличалась от ожидаемой, и устройство прекратило свою работу. Содержи- мое регистров в этом случае может быть использовано для определения причины возникновения неисправности.
Формула изобретения
входами первого блока элементов И, входы разрядов регистра выходной информации связаны с выходами второго блока памяти, а выходы являются ко- мандными выходами устройства, выходы первого блока памяти подключены к вторым входам первого блока сравнения, выходы третьего блока памяти соединены с вторыми входами первого и с первыми входами второго блоков элементов И, выходы которьк связаны с первыми и вторыми входами второго блока сравнения, первый и второй информационные входы и тактирующий вход блока управления, подключены соответственно к выходу второго блока сравнения, к выходу Равно первого блока сравнения и к выходу генератора тактовых импульсов, первый и вто- рой команднью выходы блока управления связаны соответственно с контрольнь М выходом устройства и с входом синхро ниэации регистра входной информации, (отличающееся тем, что, с целью повьшения быстродействия и на- дежности устройства, в него введены регистр памяти кода ситуации и регистр последовательных приближений, входы разрядов регистра памяти кода ситуации соединены с выходами первого блока памяти, а выходы связаны с вторыми входами второго блока элемен тов И, выходы разрядов регистра последовательных приближений соед,инены с адресными входами первого, второго и третьего блоков памяти, вход синхронизации, вход ввода данных, выход сигнализации о конце преобразования
и стартовый вход регистра последовательных приближений соединены соответственно с выходом генератора тактовых импульсов, с выходом Больше первого блока сравнения, с третьим информационным входом и с третьим командным выходом блока управления, четвертый комавдный выход которого подключен к входам синхронизации регистров выходной информации и памяти кода ситуации.
Г
4
f5
Фие.г
iiiiiniiinniiiiiiiiiiiiHiiii.f
Г1 П n Пл
п
И
4ZWJ
1
П
irif
II
И
1
L
И
11
| Стохастическая система управления | 1972 |
|
SU562795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
