Изобретение относится к системам автоматического управления и может быть использовано при управлении сложными техническими системами с преимущественно дискретным характером технологического цикла,
Целью изобретения является повышение быстродействия.
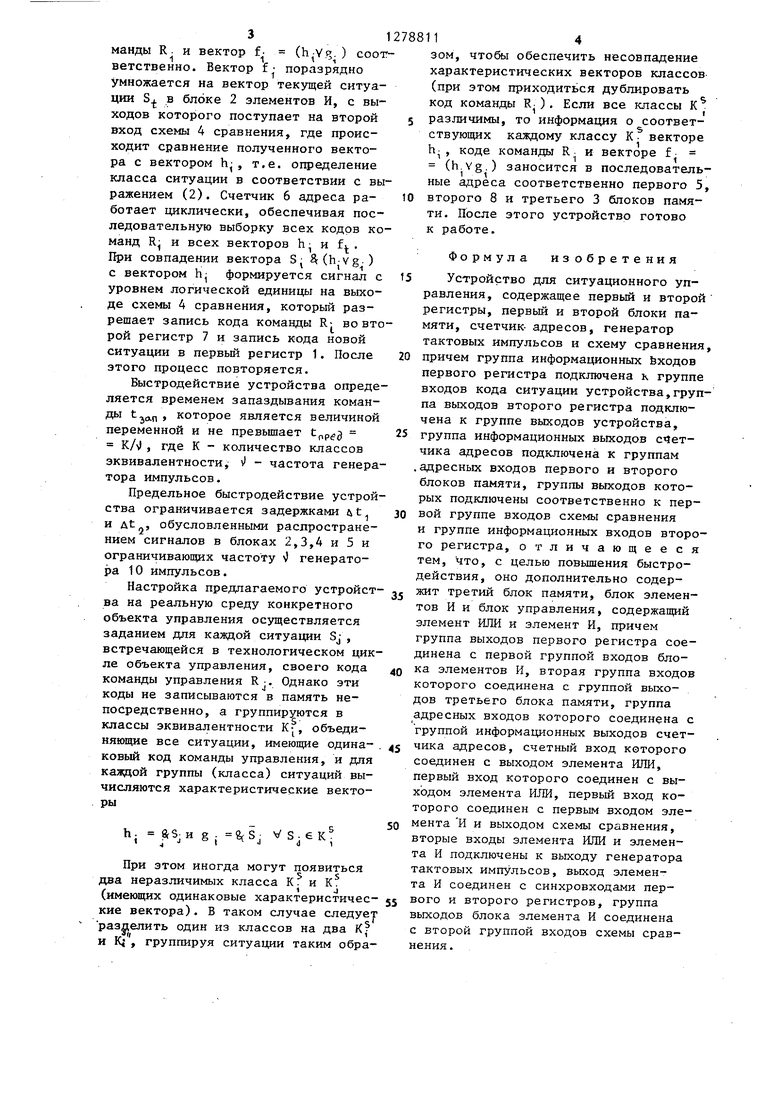
На фиг.1 изображена функциональная схема устройства для ситуационного управления; на фиг.2 - функциональное построение блока управления-, на фиг.З - временные диаграммы работы устройства.
Устройство (фиго1) содержит первый регистр 1, блок 2 элементов И, третий блок 3 памяти, схему 4 сравнения, Первый блок 5 памяти, счетчик 6 адреса, второй регистр 7, второй блок 8 памяти, блок 9 управления и генератор 10 тактовых импульсов.
Блок 9 управления (фиг.2) содержит элемент ИЛИ 11 и элемент И 12, а также имеет входы 13 и 14 и выходы 15 и 16.
Существенное повышение быстродействия может быть достигнуто при такой схеме поиска, когда ищется не код ситуации, совпадающей с текущей а целый класс эквивалентности, которому принадлежит текущая ситуация.
Классом эквивалентности ситуаций называется некоторое множество ситуций К {S, S2,. ..,SJ,индуцирующи одинаковое решение R. (имеющих одинаковый код команды). Характеристическими векторами класса К. называется пара векторов h. Kg таких, .что выполняются соотношения
h;; g
s.,vs ,S,
gi ;: vs. e
.;
K,-,(1)
где S; - двоичный вектор j-й ситу5
ации класса К .
Вектор h.( содержит единицу в К-м разряде, если К-й разряд всех векторов ситуаций S из данного класса К содержит единицу (нуль).Тогда условие принадлежности текущей ситуации S.J. классу К описывается следующим логическим выражением:
S (h/g,) h,
(2)
Данное условие может быть сформу- .лировано следующим образом. Ситуация
5
0
5
0
5
0
5
50
53
S тфинадлежит классу К- в том случае, если код ситуации S, имеет единицы во всех разрядах, в которых единицы имеет hj, и не имеет единиц во всех тех разрядах, к которых единицы имеет g;. Если для любой пары классов и Kj(i.) выполняется h.&hj hj или g g. , то класс ситуации м:ожет быть однозначно определен из условия (2) без последовательного просмотра всех ситуаций и сразу выдана команда на органы управления .
Устройство работает следующим образом.
Двоичный вектср (код ситуации) от объекта управления поступает на информационные входы первого регистра 1 . В момент окончания поиска предыдущей команды управления на входе
14блока 9 управления появляется сигнал с уровнем логической единицы со схемы 4 сравнения, открывающий элемент И 12 в блоке 9 управления, и по заднему фронту очередного импульса от генератора 10 происходит запись кода команды управления с второго блока 8 памяти во второй регистр 7 и кода текущей ситуации в первый регистр 1. Если класс кода текущей ситуации совпадает с классом кода ситуации, записанной на предыдущем такте, то со схемы 4 сравнения по-прежнему поступает сигнал с . уровнем логической единицы, и процесс повторяется, пока не изменится класс текущей ситуации. Все это .время во втором регистре 7 сохраняется прежний код команды управления. При изменении кода текущей ситуации, меняющего класс ситуации, снимается логичесгсая единица с входа 14 блока 9, запирается элемент
И 12, прекращая запись информации в первый 1 и второй 7 регистры, а по заднему фронту сигнала на выходе
15блока 9, формир уемого элементом ИЛИ 11, наращивается на единицу содержимое счетчика 6 адреса. Далее по заднему фронту импульсов генератора 10, поступающих через элемент ИЛИ 11 на выход 15 блока 9, содержимое счетчика адреса продолжает наращиваться, обеспечивая последовательную выборку информации из первого 5, второго 8 и третьего 3 блоков памяти. При этом из блоков памяти выбираются вектор h..-, код команды R. и вектор f- (. ) cooir- ветственно. Вектор поразрядно умножается на вектор текущей ситуации S в блоке 2 элементов И, с выходов которого поступает на второй вход схемы 4 сравнения, где происходит сравнение полученного вектора с вектором h, т.е. определение класса ситуации в соответствии с выражением (2). Счетчик 6 адреса работает циклически, обеспечивая последовательную выборку всех кодов команд R- и всех векторов h и f. . При совпадении вектора S- 8:(hj-vg.) с вектором h- формируется сигнал с уровнем логической единицы на выходе схемы 4 сравнения, который разрешает запись кода команды R- во второй регистр 7 и запись кода новой ситуации в первый регистр 1. После этого процесс повторяется.
Быстродействие устройства определяется временем запаздывания команды , которое является величиной переменной и не превьшает K/) , где К - количество классов эквивалентности, - частота генератора импульсов.
Предельное быстродействие устройства ограничивается задержками ut и At , обусловленными распространением сигналов в блоках 2,3,4 и 5 и ограничивающих частоту ) генератора 10 импульсов.
Настройка предлагаемого устройст- жит третий блок памяти, блок элемен- ва на реальную среду конкретного тов И и блок управления, содержащий объекта управления осуществляется элемент ИЛИ и элемент И, причем заданием для каждой ситуации Sj , группа выходов первого регистра соединена с первой группой входов бло- 40 ка элементов И, вторая группа входов которого соединена с группой выходов третьего блока памяти, группа адресных входов которого соединена с группой информационных выходов счет- 5 чика адресов, счетный вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с первым входом эле- 50 мента И и выходом схемы сравнения, вторые входы элемента ИЛИ и элеменвстречающейся в технологическом цикле объекта управления, своего кода команды управления R . Однако эти коды не записываются в память непосредственно, а группируются в классы эквивалентности К-, объединяющие все ситуации, имеющие одина- . ковый код команды управления, и для каждой группы (класса) ситуаций вычисляются характеристические векторы
h. Я3,и gj VS.6K,
та И подключены к выходу генератора тактовых импульсов, выход элемента И соединен с синхровходами перПри этом иногда могут появиться два неразличимых класса К. и К. (имеющих одинаковые характеристичес- 55 вого и второго регистров, группа
та И подключены к выходу генерат тактовых импульсов, выход элемен та И соединен с синхровходами пер
кие вектора). В таком случае следует разделить один из классов на два К и IQ , группируя ситуации таким обравыходов блока элемента И соединен с второй группой входов схемы сра нения .
зом, чтобы обеспечить несовпадение характеристических векторов классов (при этом приходиться дублировать код команды R.). Если все классы К различимы, то информация о соответствующих каждому классу К векторе h-, коде команды R- и векторе f (h.Yg.) заносится в последовательные адреса соответственно первого 5, второго 8 и третьего 3 блоков памяти. После этого устройство готово к работе.
Формула изобретения
Устройство для ситуационного управления, содержащее первый и второй регистры, первый и второй блоки памяти, счетчик- адресов, генератор тактовых импульсов и схему сравнения,
причем группа информационных Ьходов первого регистра подключена к группе входов кода ситуации устройства,группа выходов второго регистра подключена к группе выходов устройства,
группа информационных выходов счетчика адресов подключена к группам адресных входов первого и второго блоков памяти, группы выходов которых подключены соответственно к первой группе входов схемы сравнения
и группе информационных входов второго регистра, отличающееся тем. Что, с целью повышения быстродействия, оно дополнительно содервого и второго регистров, группа
та И подключены к выходу генератора тактовых импульсов, выход элемента И соединен с синхровходами первыходов блока элемента И соединена с второй группой входов схемы сравнения .
Редактор О, Юрковецкая
Составитель Ю. Ланцов
Техред М.Ходанич Корректор А. Обручар
Заказ 6835/45Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4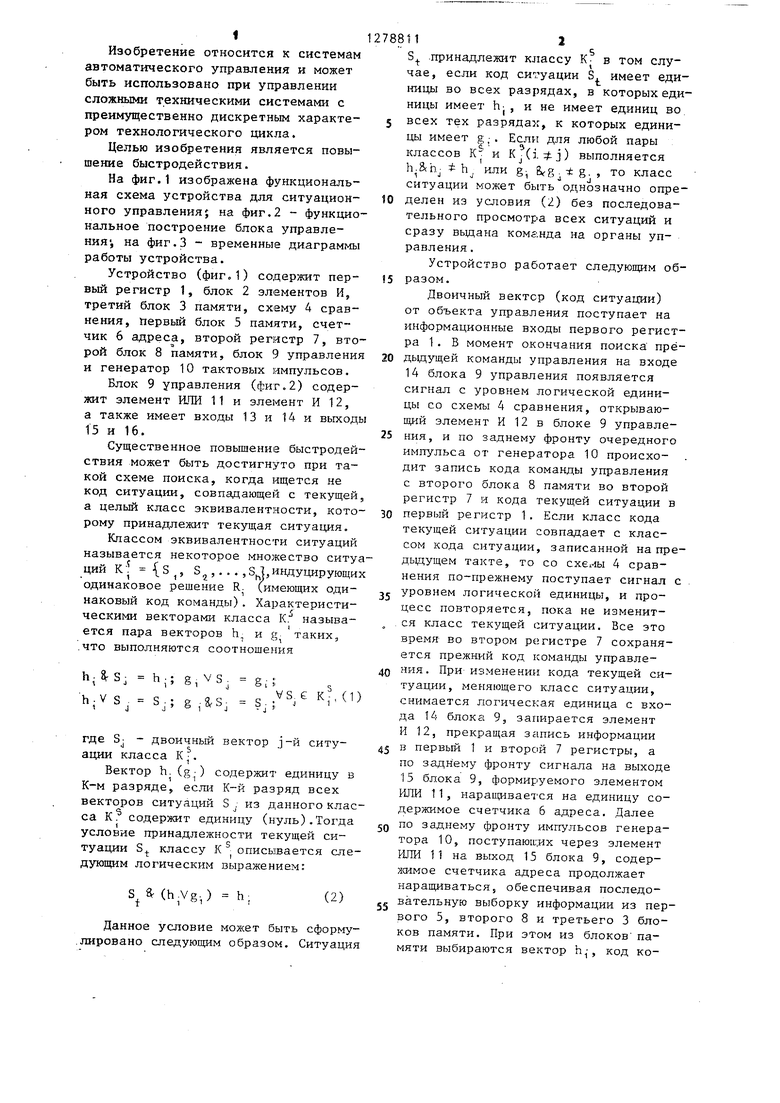
| название | год | авторы | номер документа |
|---|---|---|---|
| Ассоциативное управляющее устройство | 1986 |
|
SU1322232A1 |
| Устройство для классификации управляющих ситуаций | 1990 |
|
SU1742819A1 |
| Ассоциативное управляющее устройство | 1989 |
|
SU1665339A1 |
| АДАПТИВНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1995 |
|
RU2093881C1 |
| Устройство для иерархического ситуационного управления | 1989 |
|
SU1725185A1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2012 |
|
RU2536368C2 |
| Устройство для управления дискретными процессами | 1986 |
|
SU1399701A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2105343C1 |
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |

Изобретение относится к системам автоматического управления и может быть использовано при управлении сложными техническими системами преимущественно с дискретным характером технологического цикла. Целью изобретения является повьшение быстродействия. Устройство содержит -два регистра, блок элементов И, три блока памяти, схему сравнения, счетчик адреса, блок управления и генератор тактовых импульсов. Устройство осуществляет поиск класса текущей ситуации по характеристическим векторан классов, последовательно извлекаемым из блока памяти, и выдает на выходе код команды управления, соответствующей найденному классу, что позволяет достичь поставленную цель. 3 ил. (Л
| Стохастическая система управления | 1972 |
|
SU562795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для дискретного управления | 1983 |
|
SU1089550A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
