Изобретение относится к медицинской технике, а именно к устройствам для регистрации угловых перемещений при изучении двигательной активности операторов и эргономической оценки систем управления.
Известно устройство для регистрации угловых перемещений, содержащее корпус, в котором размещены датчики, причем один из датчиков соединен с нерастяжимой нитью, а два других с направляющими, снабженными пазами и расположенными перпендикулярно относительно друг друга (авт. св. СССР N 584846, кл. A 61 B 5/10, 1976).
Однако такое устройство неудобно в эксплуатации и недостаточно надежно в работе из-за того, что дуги находятся вне корпуса устройства и не защищены им, связаны с датчиками положений через конические шестерни, поэтому они при вращательном движении могут задевать за посторонние предметы, увеличивают габариты устройства. Зубчатое коническое зацепление создает дополнительное трение и вводит погрешность. От этого нерастяжимая нить при переносе руки оператора в пространство изгибается до 45 60o. На эту же величину возникает погрешность в показаниях датчиков положений.
Цель изобретения повышение точности измерения угловых перемещений сегментов тела человека.
Эта цель достигается тем, что направляющие выполнены в видек планок, одним из концов укрепленных на осях датчиков.
Корпус снабжен сферическим шарниром со сквозным отверстием, соосно которому в шарнире закреплены телескопическая штанга, расположенная снаружи корпуса, и патрубок, расположенный внутри корпуса, второй конец которого подвижно установлен в пазах планок в месте их пересечения, при этом нерастяжимая нить пропущена внутри телескопической штанги и патрубки и закреплена на верхнем звене телескопической штанги.
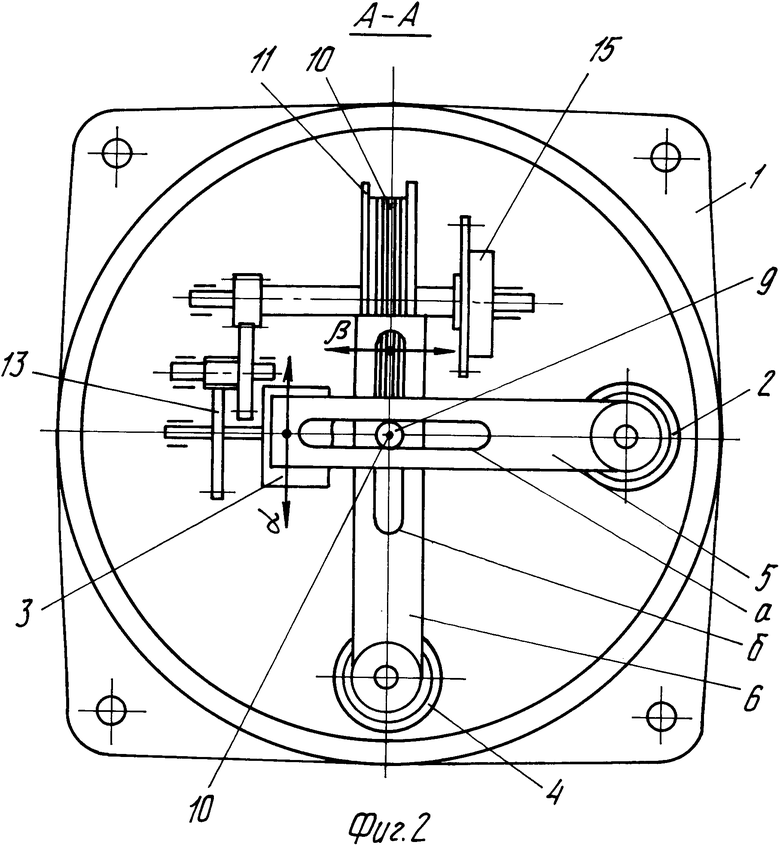
На фиг. 1 изображено устройство для регистрации угловых перемещений, разрез: на фиг. 2 сечение А-А на фиг. 1.
Устройство для регистрации угловых перемещений содержит корпус 1, в котором закреплены датчики 2, 3, 4. На осях датчиков закрепления горизонтальные планки 5 и 6 с пазами. Планки ориентированы в двух взаимно перпендикулярных плоскостях. В корпусе 1 подвижно установлен сферический подшипник 7. В подшипнике закреплена телескопическая штанга 8, а внутрь на нем закреплен патрубок 9, подвижно установленный в пазах планок 5 и 6. При этом через внутреннюю полость патрубка 9 и штанги 8 пропущена нерастяжимая нить 10, которая закреплена на подвижно установленном ролике 11 и на верхнем звене 12 штанги 8. Ролик 11 с одной стороны через редуктор 13 соединен с датчиком 3, а с другой через центральный триб 14 с упругим чувствительным элементом - барабаном 15, закрепленным в корпусе 1. На верхнем звене 12 закреплено кольцо 16 для надевания его на палец руки оператора.
В качестве датчиков положений 2, 3, 4 применены бесконтактные сельсины. Все выводы от датчиков 2, 3, 4 соединены с регистрирующей аппаратурой (не показана).
Устройство работает следующим образом.
При управлении объектом, как движущимся, так и неподвижным, оператор переносит руки с одного органа управления на другой. При этом нить 10 то сматывается с ролика 11, то на него наматывается под воздействием пружины барабана 15.
При вращении ролика 11 через редуктор 13 поворачивается ротор сельсина-датчика 3, который выдает электрический сигнал на регистрирующую аппаратуру в виде полярной координаты изменения радиуса перемещения руки оператора в пространстве.
При отклонении руки оператора в сторону патрубок 9 упирается в планку 5 и скользит одновременно, по пазу планки 6. Планка 5 поворачивает ось датчика 2 по углу α который выдает электрический сигнал на регистрирующую аппаратуру в виде полярной координаты изменения угла перемещения руки оператора в пространстве. То же происходит, когда патрубок 9 перемещает деталь планку 6 по углу b сильсина датчика 4, двигаясь по пазу планки 5. В этом случае выдается сигнал от датчика 4. Выдавая сигнал по радиусу и углам поворота, регистрирующая аппаратура преобразует их в положение точки в пространство по времени.
Такая конструкция позволяет избавиться от изгибания нити 10. Звенья штанги 8 установлены одна в другой в ходовой посадке, поэтому убираются без трения за счет пружины барабана 15. При вытягивании нити 10 усилие вытягивания может быть достигнуто постоянным за счет редукции между барабаном 15 и роликом 11, а также выбором диаметра ролика 11.
Описываемое устройство позволяет точно и полно провести измерения по трем осям положения руки оператора в пространстве, как в состоянии покоя, так и при движении объекта. Устройство может быть использовано при экспериментальной оценке компоновки и геометрии кабины, имеющей большое количество органов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации положений отдельных сегментов тела человека в пространстве | 1976 |
|
SU584846A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| Устройство для определения направления взгляда | 1977 |
|
SU670296A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПНЕВМАТИЧЕСКИХ УДАРНЫХ ИНСТРУМЕНТОВ | 1991 |
|
RU2051022C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| УСТРОЙСТВО ДЛЯ РЕПОЗИЦИИ КОСТНЫХ ОТЛОМКОВ | 2002 |
|
RU2230516C2 |
| НОСИМОЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУК ПОЛЬЗОВАТЕЛЯ | 2021 |
|
RU2808690C1 |
Изобретение относится к медицинской технике, а именно к устройствам для изучения двигательной активности операторов и эргометрической оценки систем управления. Цель изобретения - повышение точности измерения угловых перемещений сегментов тела человека. Устройство содержит корпус 1, в котором размещены датчики 2 и 3, причем один из датчиков соединен с нерастяжимой нитью 10, а два других - с направляющими, снабженными пазами и расположенными перпендикулярно относительно друг друга. При этом направляющие выполнены в виде планок 5 и 6, одним из концов укрепленных на осях датчиков. Корпус 1 снабжен сферическим шарниром со сквозным отверстием, соосно которому в шарнире закреплены телескопическая штанга и патрубок. Нерастяжимая нить 10 пропущена внутри телескопической штанги 8 и патрубка 9. При управлении объектом оператор переносит руку с одного органа управления на другой. При этом нить 10 то сматывается с ролика 11, то на него наматывается под воздействием пружины барабана 15. При этом датчики 2 - 4 регистрируют положение руки оператора по трем осям координат. 2 ил.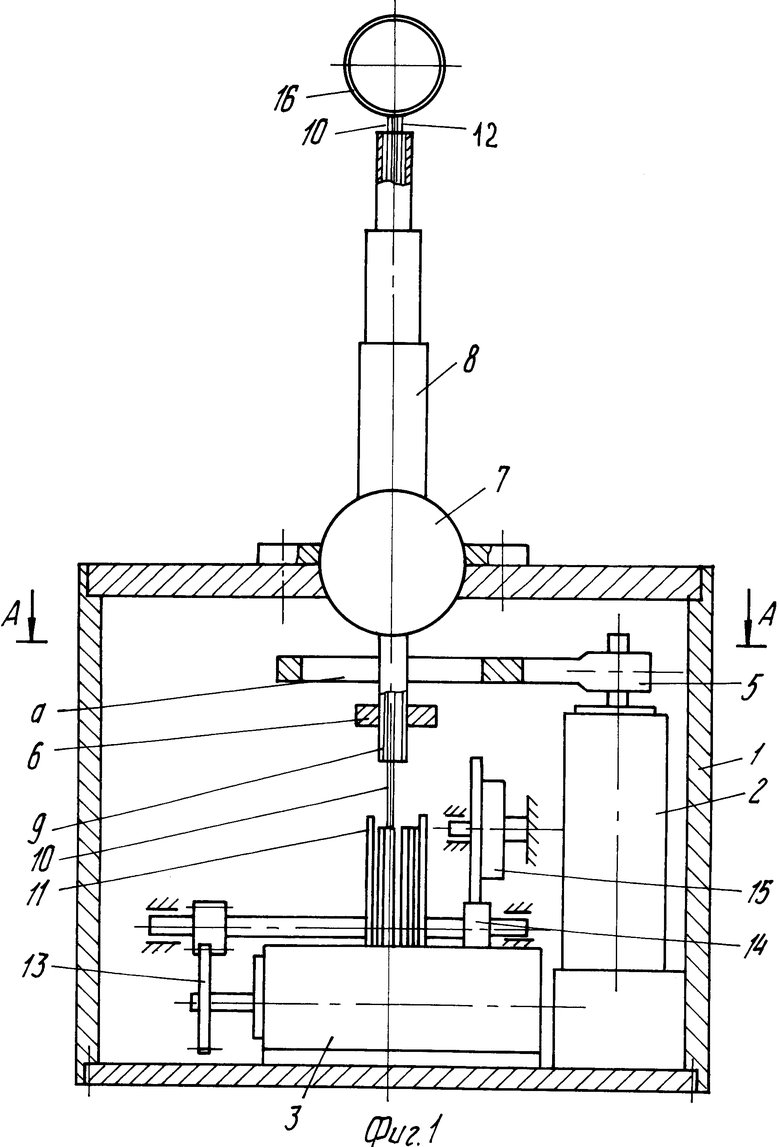
Устройство для регистрации угловых перемещений, содержащее корпус, в котором размещены датчики, причем один из датчиков соединен с нерастяжимой нитью, а два других с направляющими, снабженными пазами и расположенными перпендикулярно относительно друг друга, отличающееся тем, что, с целью повышения точности измерения угловых перемещений сегментов тела человека, направляющие выполнены в виде планок, одним из концов укрепленных на осях датчиков, корпус снабжен сферическим шарниром со сквозным отверстием, соосно которому в шарнире закреплены телескопическая штанга, расположенная снаружи корпуса, и патрубок, расположенный внутри корпуса, второй конец которого подвижно установлен в пазах планок в месте их пересечения, при этом нерастяжимая нить пропущена внутри телескопической штанги и патрубка и закреплена на верхнем звене телескопической штанги.
| Устройство для регистрации положений отдельных сегментов тела человека в пространстве | 1976 |
|
SU584846A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
