Изобретение относится к космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора.
Известна сборка штанги с механизмом развертывания [1], содержащая развертываемую и убираемую штангу с фиксированным концом для жесткого крепления на поверхности опорной конструкции и свободным концом, который перемещается относительно фиксированного конца по крайней мере три троса, каждый из которых одним концом соединен со свободным концом штанги, средство развертывания, включающее три барабана, прикрепленные ко второму концу каждого троса для избирательного развертывания и втягивания штанги, вспомогательные средства развертывания, исполнительные органы, включая три шаговых электромотора, привод каждого электромотора соединен с одним из тросовых барабанов, датчики для контроля положения свободного конца штанги.
Однако указанная сборка штанги осуществляет только операцию перемещения груза вдоль оси штанги. Она является автоматическим устройством и требует для осуществления операций развертывания и складывания штанги потребления электрической энергии космического корабля. Необходим механизм осуществления электрических соединений с системами управления электропитания космического корабля. Не предусмотрены механизмы разворота полезного груза относительно корпуса космического корабля. Тросовая система расположена на наружных элементах конструкции, что увеличивает вероятность нарушения ее целостности и работоспособности.
Наиболее близким к изобретению по технической сущности является приспособление для перемещения грузов за пределами космического корабля [2], содержащее установочный замок, поворотную площадку с осью вращения перпендикулярной установочной поверхности, телескопическую балку, подвижно прикрепленную к поворотной площадке, механизмы разворотов и удлинения балки, узлы крепления оператора, механизм крепления грузов в виде зажимного устройства для грузов, подвижно установленное на конце балки.
Однако крепление телескопической штанги на основании поворотной площадки не позволяет без привлечения дополнительных средств манипулировать с малоразмерными грузами, размещенными за возвышающимися над уровнем поворотной площадки элементами конструкции орбитального корабля, либо с грузами, расположенными ниже уровня поворотной площадки, например, внутри орбитального корабля.
Техническим результатом данного изобретения является обеспечение возможности выполнения работ с малоразмерными грузами, расположенными за крупногабаритными элементами конструкций, например, орбитального космического корабля, а также с грузами, расположенными ниже уровня установки устройства для перемещения грузов.
Технический результат достигается тем, что в устройстве для перемещения грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащем установочный замок, поворотную площадку с осью вращения, перпендикулярной установочной поверхности, телескопическую балку, подвижно прикрепленную к поворотной площадке, механизмы разворотов и удлинения балки, узлы крепления оператора, механизм крепления грузов, подвижно установленный на конце балки, в отличие от прототипа установочный замок выполнен в виде ручного рычажного механизма, механизмы разворотов телескопической балки выполнены в виде узлов ручного управления и размещены на поворотной площадке в зоне, доступной рукам оператора, механизм удлинения звеньев телескопической балки выполнен в виде системы тросов, размещенных внутри балки, узлы крепления оператора расположены по другую сторону относительно оси вращения поворотной площадки от узла крепления груза, на механизме крепления грузов установлена телескопическая штанга, один конец которой закреплен на зажимном устройстве для грузов телескопической балки и оснащен механизмом стабилизации положения штанги, а на другом конце подвижно установлен дополнительный механизм крепления грузов.
Реализацию устройства для перемещения грузов рассмотрим на примере конструкции, представленной на фиг. 1 - 9.
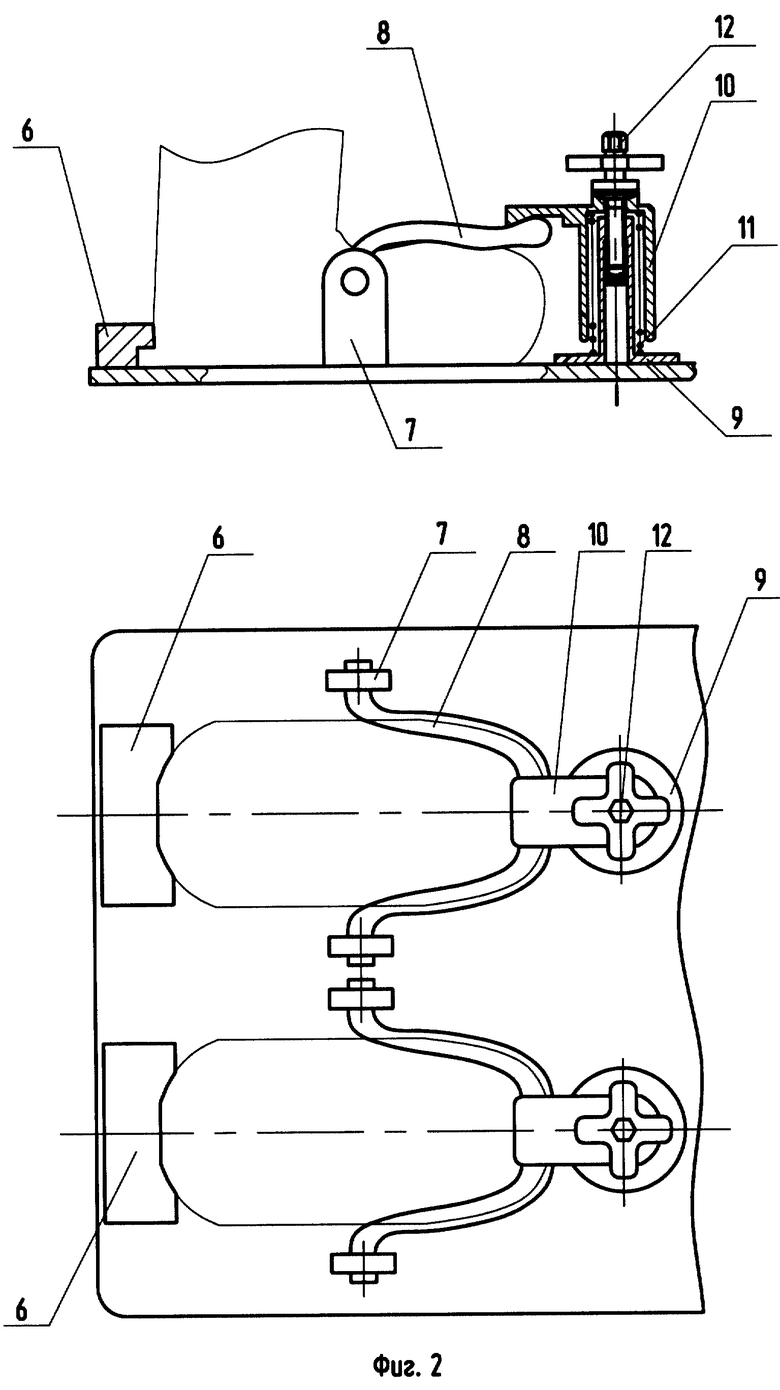
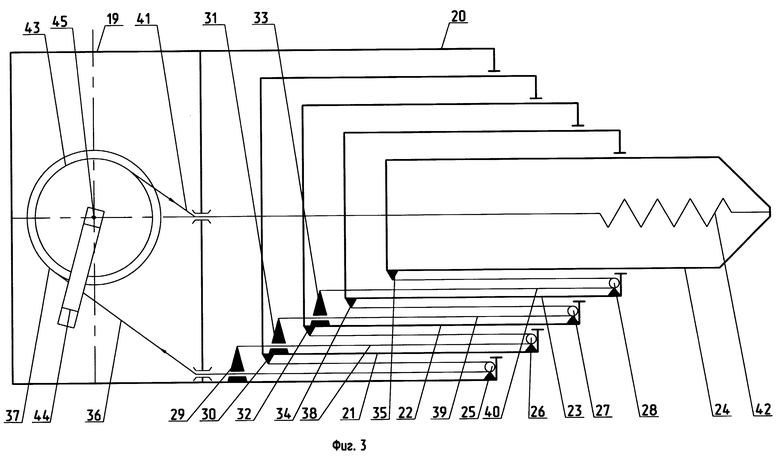
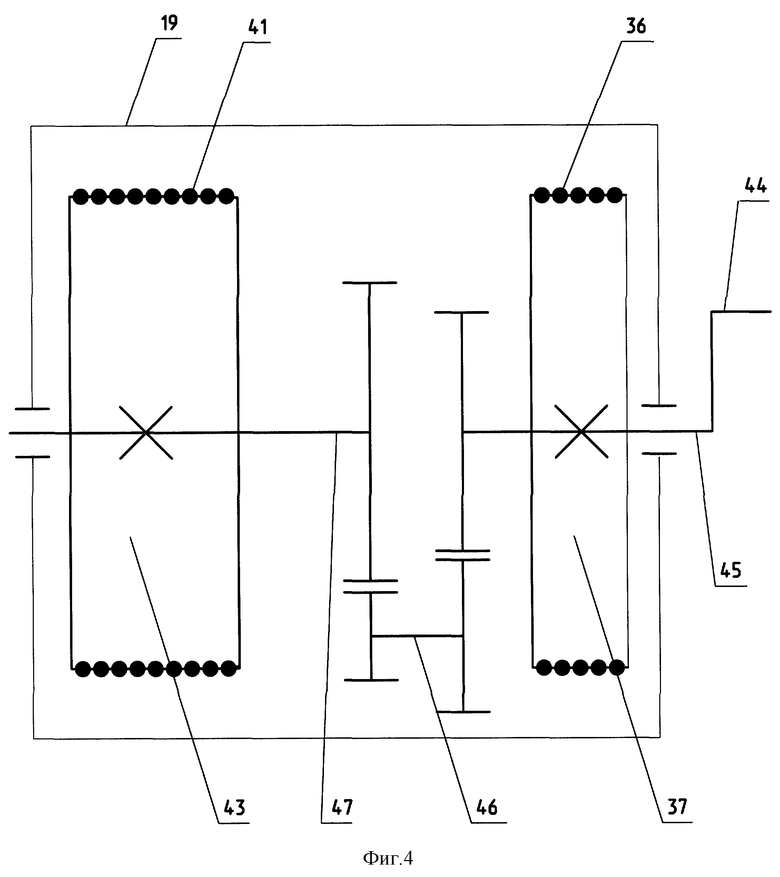
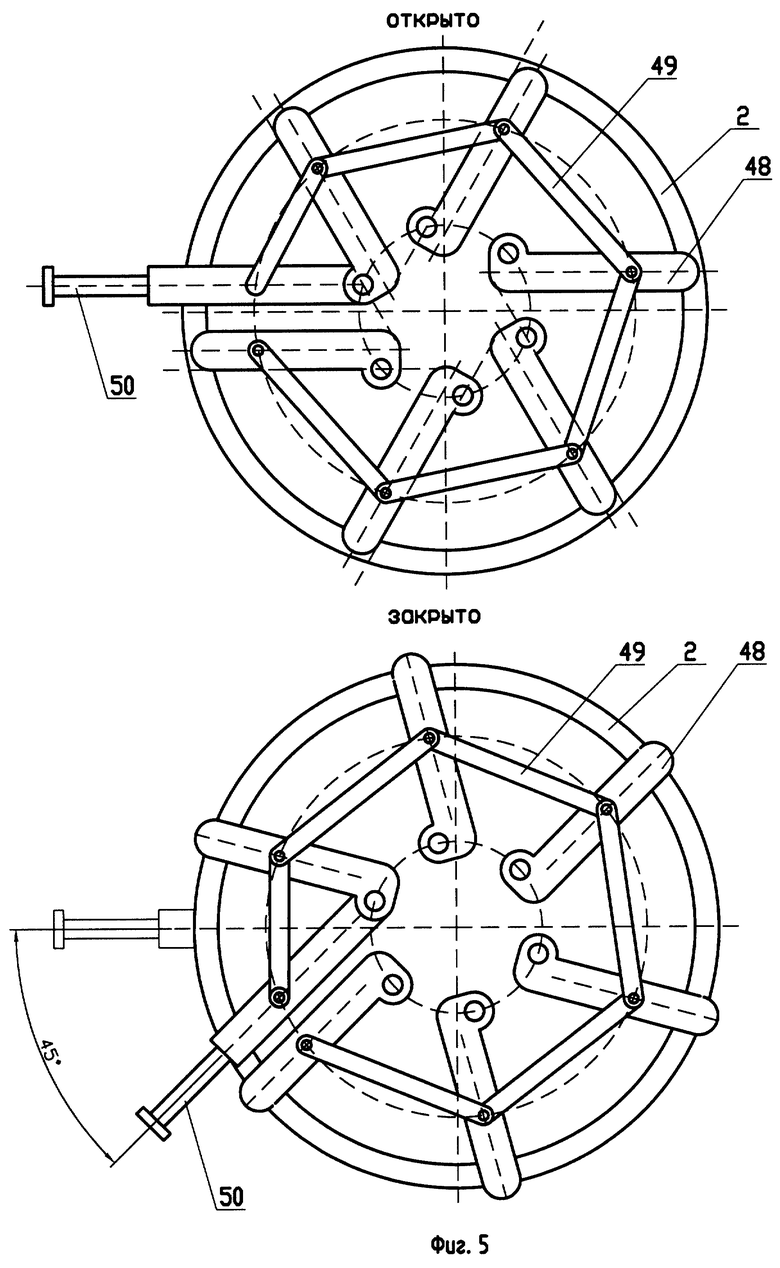
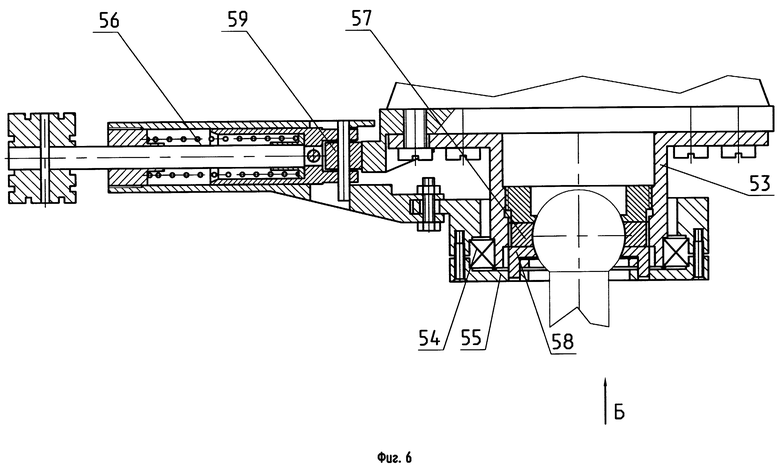
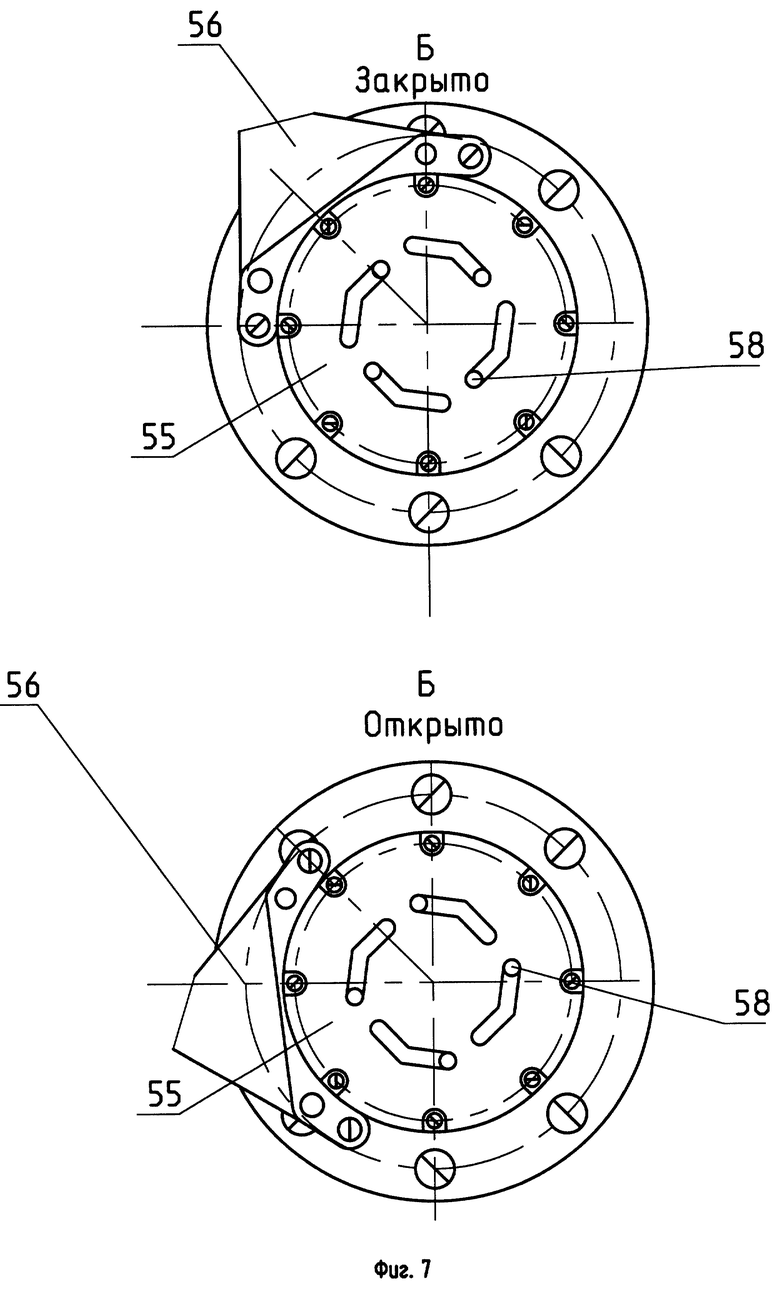
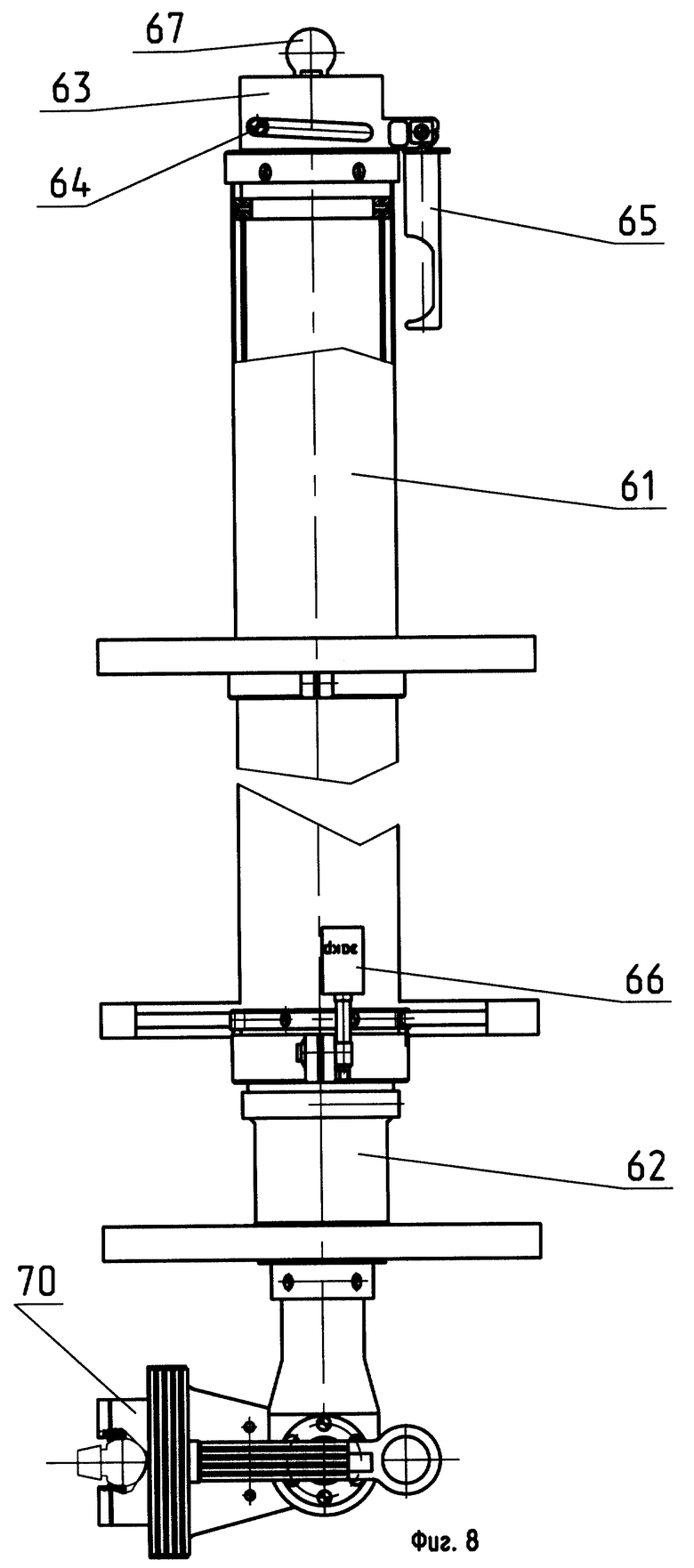
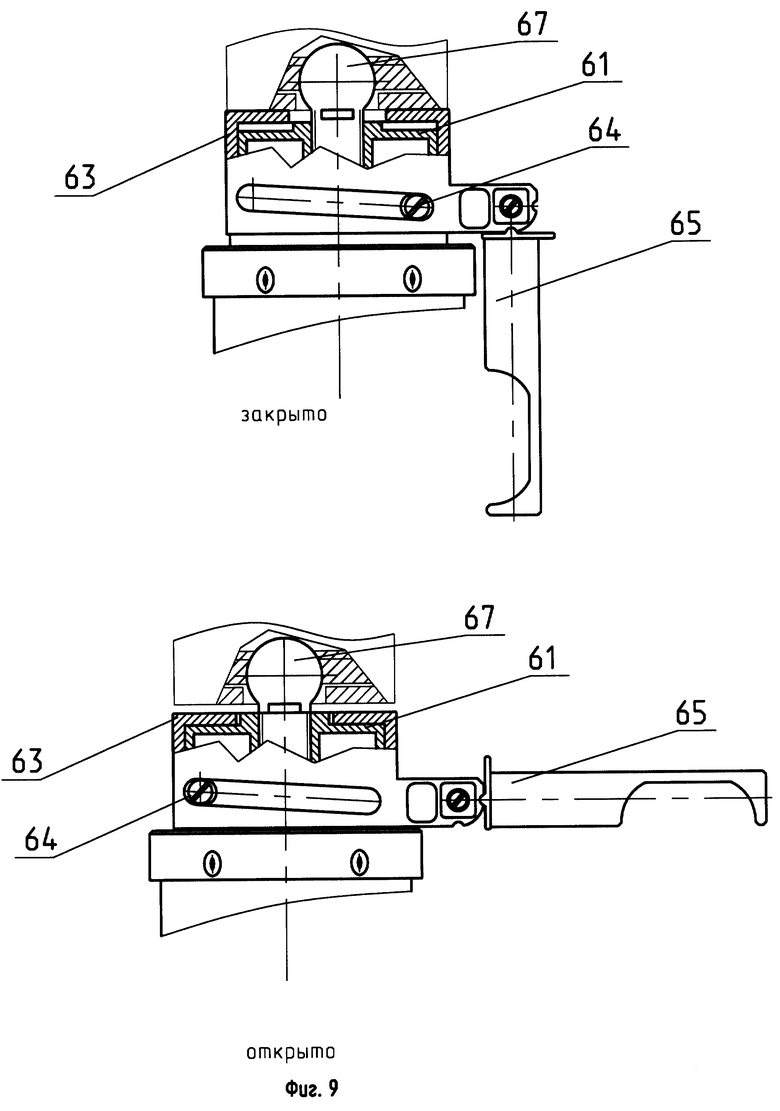
На фиг. 1 представлен общий вид устройства; на фиг. 2 - узел крепления оператора; на фиг. 3 - схема тросовой системы удлинения балки; на фиг. 4 - схема привода выдвижения звеньев балки; на фиг. 5 - схема установочного замка; на фиг. 6, 7 - механизм крепления грузов; на фиг. 8 - телескопическая штанга; на фиг. 9 - механизм стабилизации положения штанги.
Устройство содержит неподвижную опору 1, на которой закреплен установочный замок 2, закрепляющий устройство на месте эксплуатации, например на внешней поверхности корпуса орбитального корабля. На неподвижной опоре 1 соосно оси 3, перпендикулярной установочной поверхности (т.е. перпендикулярной плоскости, проходящей через касательные к данной поверхности, если она криволинейна), на подшипниках 4 установлена поворотная площадка 5. На ней размещены два узла крепления оператора, каждый из которых содержит ограничитель движения пятки оператора 6, стойку 7, подвижную относительно стоек 7 скобу крепления носка обуви оператора 8 и замок крепления скобы, содержащий стойку 9, зажим 10, пружину 11 и винт 12. На поворотной площадке 5 на оси 13, перпендикулярной оси 3, подвижно установлена телескопическая балка 14, а также рукоятка 15 разворота площадки 5 вокруг оси 3, снабженная шестеренчатым понижающим редуктором поворота 16, и рукоятка 17 разворота телескопической балки вокруг оси 13, снабженная шестеренчатым понижающим редуктором 18. Входная шестерня редуктора 16 неподвижно закреплена на рукоятке 15 соосно с ней, выходная шестерня размещена на оси 3 неподвижной опоры 1. Входная шестерня редуктора 18 неподвижно закреплена на рукоятке 17 соосно с ней, выходная шестерня - на узле выдвижения 19 соосно оси 13. Телескопическая балка 14 содержит неподвижное звено 20 с закрепленным на ней узлом выдвижения звеньев 19 телескопической балки 14, подвижные звенья, например 21, 22, 23, 24, роликовые опоры, например 25, 26, 27, 28, размещенные на дальних от узла выдвижения 19 концах звеньев 20,21,22,23,24 телескопической балки 14, и узлы крепления тросов, например 29, 30, 31, 32, 33, 34, 35, размещенные на ближних от узла выдвижения 19 концах звеньев 20, 21, 22, 23, 24 телескопической балки 14, систему тросов. Система тросов, например, содержит трос 36, одним концом закрепленный на барабане 37 узла выдвижения 19, переброшенный через ролик 25, и вторым концом закрепленный за узел крепления 30; трос 38, одним концом закрепленный за узел крепления 29, переброшенный через ролик 26, и вторым концом закрепленный за узел крепления 32; трос 39, одним концом закрепленный за узел крепления 31, переброшенный через ролик 27, и вторым концом закрепленный за узел крепления 34; трос 40, одним концом закрепленный за узел крепления 33, переброшенный через ролик 28, и другим концом закрепленный за узел крепления 35; тросы выдвижения последующих звеньев, закрепленные аналогично торсу 40; трос складывания 41, одним концом через пружинный компенсатор 42 натяжения троса, соединенный со звеном 24 телескопической балки 14, а другим концом закрепленный на барабане складывания 43. Привод узла выдвижения 19 закреплен на поворотной площадке 5 и неподвижном звене 20 телескопической балки 14 и содержит рукоятку 44, неподвижно закрепленную на оси 45, барабан 37, неподвижно закрепленный на оси 45, с закрепленным на его внешней поверхности, одним концом троса 36, шестеренчатый редуктор 46 синхронизации натяжения торосов 36, 41, соединяющий оси барабанов 37, 43, барабан 43, неподвижно закрепленный на оси 47, с закрепленным на его внешней поверхности концом троса 41. Ось вращения 3 поворотной площадки 5 расположена между узлами крепления оператора и телескопической балкой. Установочный замок 2 содержит систему поворотных рычагов 48, соединенных подвижно планками 49 с поворотной рукояткой 50. На дальнем конце телескопической балки 14 подвижно закреплен механизм крепления грузов 51 с рукояткой фиксации положения груза 52. Механизм крепления грузов содержит корпус 53, подвижно установленный на нем на подшипниках 54 запорный диск 55 с рукояткой 56, сухари в виде постоянных магнитов 57 и механические затворы 58 с торцевыми концами, входящими в косые пазы запорного диска 55. Рукоятка 56 фиксируется подпружиненным роликом 59 в положениях рукоятки "открыто" и "закрыто" путем западания ролика в соответствующие вырезы на корпусе 53. На механизме крепления грузов 51, размещенном на выходном звене телескопической балки 14, установлена телескопическая штанга 60. Телескопическая штанга 60 включает в себя неподвижное звено 61 и, например, выдвигаемое подвижное звено 62. Звено 61 выполнено в виде трубы, на одном конце которой подвижно установлен механизм стабилизации положения штанги, выполненный в виде стакана 63. Внутренний диаметр стакана 63 подвижно сопрягается с наружным диаметром звена 61. Торцевая поверхность стакана 63 образует опорную плоскость сопряжения с торцевой плоскостью механизма крепления грузов 51, а на наружной цилиндрической поверхности стакана 63 выполнен косой сквозной вырез, в котором размещен торцевой палец 64, закрепленный на наружной поверхности звена 61. Косой вырез на стакане 63 и входящий в него палец 64 образуют штыковое байонетное соединение звена 61 и стакана 63. На открытом конце стакана 63, противоположном опорной плоскости, выполнен зажим фиксации положения стакана 63 на звене 61, например цанговый зажим, в виде сквозной прорези на стакане 63 вдоль его оси и пары винт-гайка с рукояткой фиксации 65. На конце звена 61, противоположном месту установки механизма стабилизации положения груза, размещен механизм крепления подвижного звена 62, например цанговый зажим, выполненный в виде сквозной продольной прорези стенки звена 62 и пары винт-гайка с рукояткой фиксации 66. На дальнем конце подвижного звена 62 подвижно на оси, перпендикулярной продольной оси штанги, установлен дополнительный механизм крепления груза 70, аналогичный механизму крепления груза 51 телескопической балки 14. На торцевой части звена 61 со стороны установки стакана 63 закреплена шаровидная опора 67. Внешний диаметр опоры 67 соответствует внутреннему диаметру захвата механизма крепления грузов 51. Опора 67 выполнена из магнитопроводящей стали.
Устройство работает следующим образом. Перед установкой устройства на место эксплуатации установочный замок находится в положение "открыто", при этом поворотные рычаги утоплены внутрь корпуса замка. После установки на приемную поверхность рабочего места, имеющего неподвижные заплечики, рукоятка 50 замка 2 переводится в положение "закрыто", при этом рычаги 48 через систему планок 49 за счет смещения их осей вращения от оси замка выводятся за пределы корпуса замка, осуществляя захват за заплечики рабочего места и крепление всего устройства. При снятии устройства проводятся операции в обратном порядке. После установки устройства оператор закрепляется на поворотной площадке на узлах крепления оператора с упором пяткой в ограничитель движения пятки 6 и последующим закреплением носка обуви скобой 8 и замком крепления носка посредством установки зажима 10 на скобу 8 и закреплением скобы винтом 12. При вывинчивании винта 12 из стойки 9 пружина 11 приподнимает зажим 10, освобождая скобу 8 и ногу оператора. Вращая рукоятку 15 посредством понижающего редуктора 16, оператор производит замедленный разворот вокруг оси 3 поворотной площадки 5 с закрепленной на ней телескопической балкой 14. При этом оператор остается в положении "лицом к грузу". Вращая рукоятку 17 через понижающий редуктор 18, оператор выполняет замедленный подъем или опускание телескопической балки вокруг оси 13. Для выполнения выдвижения предварительно сложенных выдвижных звеньев телескопической балки вращением рукоятки 44 приводится во вращение барабан 37. При этом на барабан наматывается закрепленный одним концом на его внешней поверхности трос 36. Трос 36 через ролик 25, закрепленный на дальнем конце неподвижного звена 20 и неподвижно закрепленный вторым концом на ближним конце 30 первого подвижного звена 21, выдвигает первое подвижное звено 21 вместе с роликом 26, что в свою очередь позволяет тросом 38, имеющим один конец, закрепленный за узел крепления 29 на ближнем конце неподвижного звена 20 телескопической балки, а другой - на ближнем конце 32 второго подвижного звена 22, одновременно приводить к выдвижению второго подвижного звена из первого подвижного звена вместе с роликом 27 и приводить в тоже время к равному выдвижению третьего подвижного звена 23 посредством троса 39, закрепленного на ближнем конце 31 первого подвижного звена 21, переброшенного через ролик 27 и вторым концом закрепленного на ближнем конце 34 третьего подвижного звена 23, вместе с роликом 28, закрепленным на дальнем конце третьего подвижного звена 23. Одновременно тросом 40, закрепленным на ближнем конце 33 второго подвижного звена 22 и другим концом на ближнем конце 35 четвертого подвижного звена 24, через ролик 28 четвертое подвижное звено 24 выдвигается на равное расстояние. По аналогии крепятся тросы последующих звеньев телескопической балки, что приводит к одновременному выдвижению всех подвижных звеньев телескопической балки на равные расстояния. Благодаря такой схеме выдвижения оператор по степени выдвижения первого звена телескопической балки способен оценить общее удлинение всей телескопической балки. При этом с наматыванием троса 36 на барабан 37 синхронно производится сматывание троса 41 с барабана 43 посредством редуктора 46, обеспечивающего соответствие линейных скоростей выдвижения телескопической балки и удлинения свободного конца троса 41, например при четырех выдвигаемых звеньях линейная скорость троса 41 должна быть в четыре раза выше линейной скорости троса 36. Пружинный компенсатор натяжения троса 42 способствует равномерному движению троса без рывков, сохраняя первоначальное натяжение троса на время эксплуатации. При обратном вращении рукоятки 45 трос 41 наматывается на барабан 43. Трос 41 втягивает последнее звено 24 телескопической балки 14, и система тросов выдвижения осуществляет обратный перекат тросов 36, 38, 39, 40, производя равномерное одновременное складывание всех звеньев телескопической балки. Механизм крепления грузов 51 подвижно закреплен на последнем звене телескопической балки 14 и создает с рукояткой фиксации положения груза 52 винтовую пару, что позволяет закрепить механизм крепления грузов 51 под необходимым углом к телескопической балке 14. Груз, устанавливаемый на механизм крепления груза, должен содержать стальную магнитопроводящую сферу, сопрягаемую с внутренней сферой замка 51. Перед установкой груза рукоятка 56 отведена в положение "открыто", при этом косые пазы на запорном диске 55, взаимодействуя с торцевыми пальцами механических затворов 58, разводят затворы за пределы сферы полезного груза. При введении сферы груза внутрь замка намагниченные сухари 57 охватывают сферу груза, осуществляя его предварительный захват. В этом случае при установке груза в условиях орбитальной невесомости не требуется постоянных усилий удержания оператора-такелажника до окончательного закрепления груза. Окончательное закрепление груза осуществляется путем поворота рукоятки 56 в положение "закрыто". В этом случае механические затворы 58 под воздействием торцевых пальцев надежно дополнительно охватывают установочную сферу груза, поджимая груз к внутренней сферической поверхности корпуса 53. Для освобождения груза рукоятка 56 переводится в положение "открыто" и груз сдергивается вручную с определенным незначительным усилием с сухарей 57 и освобождается от механизма крепления груза. При наличии фиксации рукояток 15, 17, 44, 52, 56 работы могут производиться одним или двумя операторами. Телескопическая штанга 60 устанавливается на механизме крепления грузов 51 телескопической балки 14 при положении рукоятки 56 "открыто" до сопряжения внутреннего диаметра сферы захвата грузов замка и шаровидной опоры 67. При этом происходит предварительный захват штанги 60 магнитными сухарями 57. При переводе рукоятки 56 в положение "закрыто" производится механическое крепление штанги. Для обеспечения надежного сопряжения замка и штанги между их опорными плоскостями необходим гарантированный зазор. При этом колебанию штанги относительно балки 14 от воздействия инерционных моментов при разворотах балки 14 с грузом, закрепленным на штанге 60, препятствуют только силы терния в механизме крепления грузов. Для предотвращения колебаний штанги с грузом предварительно выполняется расфиксация стакана 63 путем разворота рукоятки 65 и ослабления тем самым обжима внутренней поверхности стакана 63 на наружной поверхности звена 61. При вращении стакана 63 вокруг продольной оси за счет взаимодействия косого выреза на стакане 63 и пальца 64 производится выборка зазора между опорными поверхностями механизма крепления груза 51 и стаканом 63. После этого стакан 63 фиксируется на звене цанговым зажимом. В этом случае исключаются колебания штанги 60 относительно механизма крепления грузов 51. Для обеспечения удлинения штанги на размер, необходимый для захвата груза, разворотом рукоятки 66 за счет работы пары винт-гайка производится ослабление зажима звена 62 на звене 61 и выдвижение звена 62 вручную на необходимую длину. Фиксация звена 62 на звене 61 производится цанговым механизмом при обратном вращении рукоятки 66. Захват груза осуществляется аналогично работе механизма крепления груза 51 телескопической балки 14.
Литература
1. Патент США N 5857648.
2. Заявка Германии DE 19525359C1.
3. Патент США N 4079904.
4. Патент США N 5501114.
5. Патент США N 4373690.
6. Патент США N 4955654.
7. Патент США N 4177964.
8. Патент США N 5813632.
9. Патент США N 4664344.
10. Патент EP 0858946A1.
11. Патент EP 0481888A1.
12. Сыромятников В.С. "Стыковочные устройства космических аппаратов", М. , "Машиностроение", 1984.
13. "Справочник по кранам" под ред. Гохберга М.М., "Машиностроение. Ленинградское отделение", т. 2, 1998.
14. Петухов П. З. , Ксюнин Г.П., Сермин Л.Г. "Специальные краны", М., "Машиностроение", 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2165381C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| ТРАНСФОРМИРУЕМАЯ КОНСТРУКЦИЯ | 2000 |
|
RU2167789C1 |
| ТРАНСПОРТНАЯ КОСМИЧЕСКАЯ СИСТЕМА | 1998 |
|
RU2165870C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ИЗДЕЛИЯ | 1999 |
|
RU2177567C2 |
Изобретение относится к космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора. Предлагаемое устройство содержит установочный замок, поворотную площадку с осью вращения, подвижно прикрепленную к поворотной площадке телескопическую балку с механизмами ее разворотов и удлинения, узлы крепления оператора и механизм крепления грузов, подвижно установленный на конце балки. Механизмы разворотов балки выполнены в виде узлов ручного управления и размещены на поворотной площадке в зоне, доступной рукам оператора. Механизм удлинения балки выполнен в виде системы тросов, размещенных внутри балки. Узлы крепления оператора расположены по другую сторону от узла крепления груза относительно оси вращения поворотной площадки. На механизме крепления грузов установлена телескопическая штанга, один конец которой закреплен на зажимном устройстве для грузов телескопической балки и оснащен механизмом стабилизации положения штанги. На другом конце штанги подвижно установлен дополнительный механизм крепления грузов. Изобретение обеспечивает выполнение работ с малоразмерными грузами, расположенными за крупногабаритными элементами конструкций, а также с грузами, расположенными ниже уровня установки устройства. 9 ил.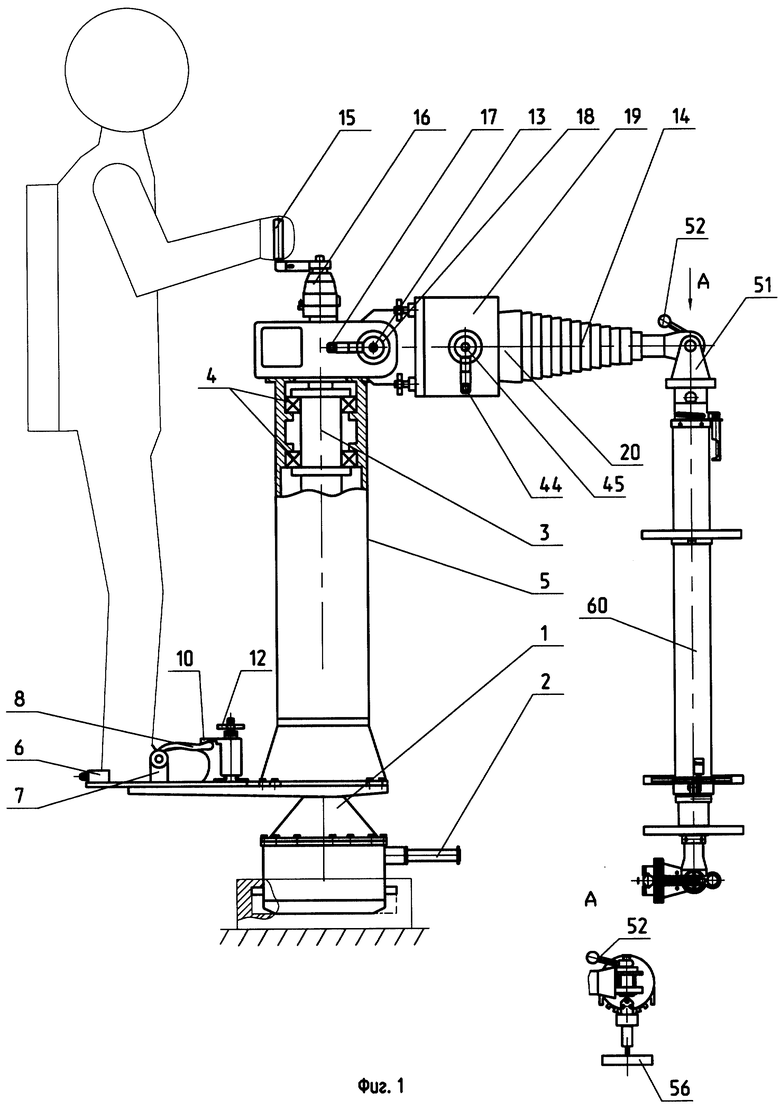
Устройство для перемещения грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащее установочный замок, поворотную площадку с осью вращения, перпендикулярной установочной поверхности, телескопическую балку, подвижно прикрепленную к поворотной площадке, механизмы разворотов и удлинения балки, узлы крепления оператора, механизм крепления грузов, подвижно установленный на конце балки, отличающееся тем, что установочный замок выполнен в виде ручного рычажного механизма, механизмы разворотов телескопической балки выполнены в виде узлов ручного управления и размещены на поворотной площадке в зоне, доступной рукам оператора, механизм удлинения звеньев телескопической балки выполнен в виде системы тросов, размещенных внутри балки, узлы крепления оператора расположены по другую сторону от узла крепления груза относительно оси вращения поворотной площадки, на механизме крепления грузов установлена телескопическая штанга, один конец которой закреплен на зажимном устройстве для грузов телескопической балки и оснащен механизмом стабилизации положения штанги, а на другом конце подвижно установлен дополнительный механизм крепления грузов.
| DE 19525359 С1, 05.06.1996 | |||
| US 5857648 A, 28.01.1997 | |||
| US 5501114 A, 03.02.1994. |

