Изобретение относится к машиностроению и может быть применено в различных его областях, например, в станкостроении, где требуется использовать широкий диапазон частот вращения выходного элемента привода без усложнения какой бы то ни было (например, электрической или гидравлической) системы машин.
Известны приводы, основной частью которых являются фрикционные вариаторы, замкнутые механизмами с зубчатыми зацеплениями, например, дифференциалами или планетарными передачами.
Как правило, один элемент замыкающей цепи соединен с выходным звеном вариатора, а второй с входным элементом привода или же с выходным элементом независимо регулируемого привода, являющегося задающим устройством.
К приводам с фиксированной частотой вращения одного из ведомых звеньев замыкающей передачи (дифференциала или планетарной) можно отнести устройство, кинематическая схема которого представлена на рис. 186 книги авторов Пронина В.А. и Ревкова Г.А. "Бесступенчатые клиноременные и фрикционные передачи" (М. Машиностроение, 1980), а также "Замкнутую передачу с торовым вариатором" по тому же источнику, рис. 188. и "Вариатор-редуктор" (авт. св. N 1597476).
Основным недостатком перечисленных устройств является малый диапазон регулирования, который к тому же достигается ценой снижения КПД привода (Бусступенчатые клиноременные и фрикционные передачи, с. 307).
К приводам к изменяемой частотой вращения обоих ведомых звеньев, кинематически связанных с суммирующим (замыкающим) механизмом, относятся передачи, схемы которых приведены на рисунках 189 и 190 упомянутого выше источника.
В этом случае приемлемый диапазон регулирования в принципе неограничен. Однако это достигается существенным усложнением привода из-за обязательного наличия отдельного регулируемого привода для работы задающего устройства. При этом части схем, введенные с целью автоматизации регулирования нагрузки, не принимаются во внимание, как выполняющие функции, не относящиеся к рассматриваемой теме.
Известны также фрикционные однопоточные вариаторы, включающие в себя тела с выпуклыми контактирующими поверхностями (авт. св. N 1364795). Их достоинство заключается в достаточно высоком КПД за счет минимального поперечного скольжения контактирующих поверхностей, так как вершины конусов качения этих поверхностей почти совпадают. Однако диапазон регулирования в условиях приемлемых габаритов устройств недостаточен для многих конкретных случаев приктического применения.
В качестве прототипа выбран привод с замкнутой кинематической цепью, содержащий вариатор, включающий три элемента, из которых один ведущий, второй ведомый, введенные в контакт между собой посредством одного из них, установленного с возможностью перемещения относительно двух других, механизм изменения передаточного отношения, механизм прижима контактирующих поверхностей и зубчатую планетарную передачу, два кинематических звена которой непосредственно связаны с двумя элементами вариатора, из которых один ведомый (Волков Д.П. Крайнев А.Ф. Трансмиссии строительных и дорожных машин. М. Машиностроение, 1974, с. 329, табл. 38, схема 3б).
Диапазон регулирования данного привода сравнительно небольшой в связи с тем, что только одно кинематическое звено замыкающей зубчатой планетарной передачи связано с ведомым элементом вариатора.
В основу изобретения поставлена задача в приводе с замкнутой кинематической цепью, содержащем вариатор, включающий три элемента, из которых один ведущий, второй ведомый, введены в контакт между собой посредством одного из них, механизм изменения передаточного отношения, механизм прижима контактирующих поверхностей и зубчатую планетарную передачу, два кинематических звена которой непосредственно связаны с двумя элементами вариатора, из которых один ведомый, путем снабжения вариатора вторым ведомым элементом, связанным со вторым кинематическим звеном зубчатой планетарной передачи, и непосредственной связи выходного элемента привода с третьим кинематическим звеном планетарной передачи обеспечить большой диапазон бесступенчатого регулирования частоты вращения выходного элемента привода.
Поставленная задача решается тем, что в предложенном приводе, содержащем ведущий и ведомый элементы, зубчатую планетарную передачу, одно из кинематических звеньев которой непосредственно связано с ведомым элементом, механизм изменения передаточного отношения и механизм прижима контактирующих поверхностей, согласно изобретению привод снабжен вторым ведомым элементом, непосредственно связанным со вторым кинематическим звеном зубчатой планетарной передачи, ведомые элементы выполнены с коническими контактирующими поверхностями, имеющими разные расчетные диаметры и ширину дорожек качения, и расположены несимметрично относительно оси вращения ведущего элемента, который выполнен со сферической поверхностью, взаимодействующей с коническими поверхностями ведомых элементов с возможностью перемещения ведущего элемента относительно ведомых, механизм изменения передаточного отношения выполнен в виде поворотной плиты с осью поворота, продолжение которой совпадает с центром сферической поверхности ведущего элемента, а механизм прижима контактирующих поверхностей содержит установленную на поворотной плите подвижную плиту с установленным на ней упомянутым ведущим элементом, упоры, жестко закрепленные на поворотной плите, и пружины, упирающиеся в упоры и в поворотную плиту.
Это дает возможность получить большой диапазон плавно изменяющихся передаточных отношений с помощью одного устройства и, как следствие, во многих случаях отказаться от применения более сложных приводов, например, электрических или гидравлических, что сокращает габариты и упрощает конструкцию всей машины.
На чертеже показана кинематическая схема предлагаемого привода с обозначением основных элементов и параметров.
На корпусе 1 установлена плита 2 с возможностью поворота вокруг оси 3, продолжение которой перпендикулярно пересекается с осью вала 4, установленного в подшипниках 5 и несущего ведущий элемент 6 со сферической контактирующей (рабочей) поверхностью 7. Элементы 2 и 3 образуют механизм изменения передаточного отношения. На поворотной плите 2 установлена подвижная плита 8, находящаяся под воздействием пружин 9, упирающихся в плиту 8 и упоры 10, жестко закрепленные на плите 2. Элементы 8, 9 и 10 составляют механизм прижима контактирующих поверхностей.
В плотном контакте с поверхностью 7 ведущего элемента 6 находятся элементы 11 и 12, имеющие с поверхностью 7 контакты по коническим поверхностям 13 и 14.
Ведомый элемент 11 жестко соединен с центральным (планетарным) зубчатым колесом 15 планетарной передачи, а ведомый элемент 12 с валом 16, который составляет одно целое с внутренним (солнечным) зубчатым колесом 17 планетарной передачи. С колесами 15 и 17 находятся в зацеплении сателлиты 18, установленные с возможностью вращения на водиле 19, имеющем удлиненный хвостовик 20, являющийся выходным валом привода. Оси вращения ведущего и ведомых элементов расположены в одной плоскости.
Привод работает следующим образом.
При вращении вала 4 (в оптимальном варианте это ротор асинхронного электродвигателя), например, в направлении 21, ведущий элемент 6 сообщает вращение ведомым элементам 11 и 12 вследствие фрикционной связи поверхностей 7, 13 и 14. Так как ведомые элементы расположены по разные стороны от оси вращения вала 4, направления их вращения 22 и 23 противоположные.
При постоянной частоте вращения ведущего элемента изменение частоты вращения вала 20 возможно путем изменения положения поворотной плиты 2 в направлении изогнутой реверсивной стрелки 24.
Вследствие этого изменяются расчетные диаметры X и Y дорожек качения на ведущем элементе. Суммирование частот вращения обоих ведомых элементов происходит в замыкающей планетарной передаче, а результирующая частота вращения получается на водиле 19 (выходном вале 20) третьем звене зубчатой планетарной передачи.
Изменение частоты вращения выходного вала 20 происходит за счет синхронного изменения частот вращения обоих ведомых элементов 11 и 12, причем повышение частоты вращения одного из них ведет к снижению ее у другого ведомого элемента. Это позволяет получить большой диапазон регулирования с помощью привода с небольшими габаритами.
В приводе возможно достичь реверсирование, однако эта цель не преследуется, и, следовательно, направление вращения выходного вала 20 в большинстве случаев совпадает с направлением вращения 22 ведомого элемента 11.
В приводе имеются условия для циркуляции мощности, так как при сопротивлении вращению водила 19 (выходного вала 20) реакция в зубчатом зацеплении 18-17 направлена в сторону ускорения вращения звена 17 и связанного с ним валом 16 ведомого элемента 12, который влияет на ведущий элемент 6 также ускоряюще. Однако эта мощность небольшая, не ухудшает стабильность работы привода и не влияет на повышение износа его деталей. Следовательно, нагрузочная способность фрикционного сопряжения 7-14 может быть значительно ниже, чем сопряжения 7-13, что дает возможность изготовлять ведомый элемент 12 с меньшим диаметром и шириной дорожки качения (поверхности 14), что облегчает варианты конструктивного обеспечения механических характеристик привода, например, смещение диапазона частот вращения.
Так как одна из контактирующих поверхностей имеет сферическую поверхность, а другие конические, вершины конусов качения направлены в одну (для каждого контакта) сторону, поперечное скольжение в местах контакта минимальное, чем обеспечивается высокий КПД привода.
Проверка кинематических возможностей привода. Исходные данные.
n=1470 об/мин частота вращения ведущего элемента;
R=52,5 мм радиус сферической поверхности ведущего элемента;
Xmax=Ymax=92 мм наибольшие расчетные диаметры дорожек качения на ведущем элементе соответственно для ведомых элементов 11 и 12;
Xmin=Ymin=30 мм наименьшие расчетные диаметры дорожек качения;
D=78 мм расчетный диаметр дорожки качения ведомого элемента 11;
d=71 мм то же ведомого элемента 12;
Z1= 26 число зубьев внутреннего (солнечного) колеса 17 планетарной передачи;
Z2=90 число зубьев центрального колеса 15.
Формула передаточного отношения привода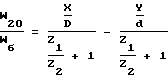
где
W20 частота вращения выходного вала;
W6 частота вращения ведущего элемента.
Все величины в формуле, кроме X, Y и W20 постоянные.
С учетом этого при W6=n=1479 об/мин,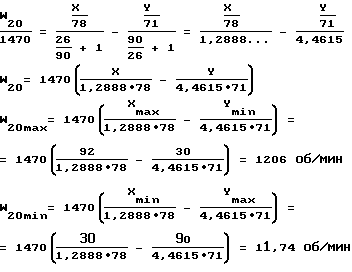
Диапазон регулирования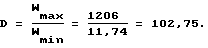 к
к
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНАЯ ПРЕЦЕССИОННАЯ ФРИКЦИОННАЯ ПЕРЕДАЧА | 1995 |
|
RU2105911C1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2009 |
|
RU2523509C2 |
| ВАЛКОВАЯ (РОЛИКОВАЯ) ПОДАЧА ЗАГОТОВОК В ЗОНУ ОБРАБОТКИ | 1998 |
|
RU2158647C2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСМИССИЯ | 1993 |
|
RU2062712C1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2007 |
|
RU2350805C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523508C2 |
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2135783C1 |
| ЭЛЕКТРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2376513C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2168032C2 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2384774C1 |
Использование: машиностроение. Сущность изобретения: привод с замкнутой кинематической цепью, в котором изменение положения ведущего элемента, имеющего сферическую контактирующую поверхность, относительно двух ведомых элементов, вращающихся в противоположных относительно друг друга направлениях, противоположно изменяют частоты вращения ведомых элементов, суммирующиеся планетарной зубчатой передачей и этим преобразующиеся в частоту вращения выходного вала, непосредственно связанного с третьим кинематическим звеном замыкающей зубчатой планетарной передачи. Ведомые элементы выполнены с коническими контактирующими поверхностями, имеющими разные расчетные диаметры и ширину дорожек качения, и расположены несимметрично относительно оси вращения ведущего элемента. Механизм изменения передаточного отношения выполнен в виде поворотной плиты с осью поворота, продолжение которой совпадает с центром сферической поверхности ведущего элемента. Механизм прижима контактирующих поверхностей содержит подвижную плиту, упоры и пружины. 1 ил.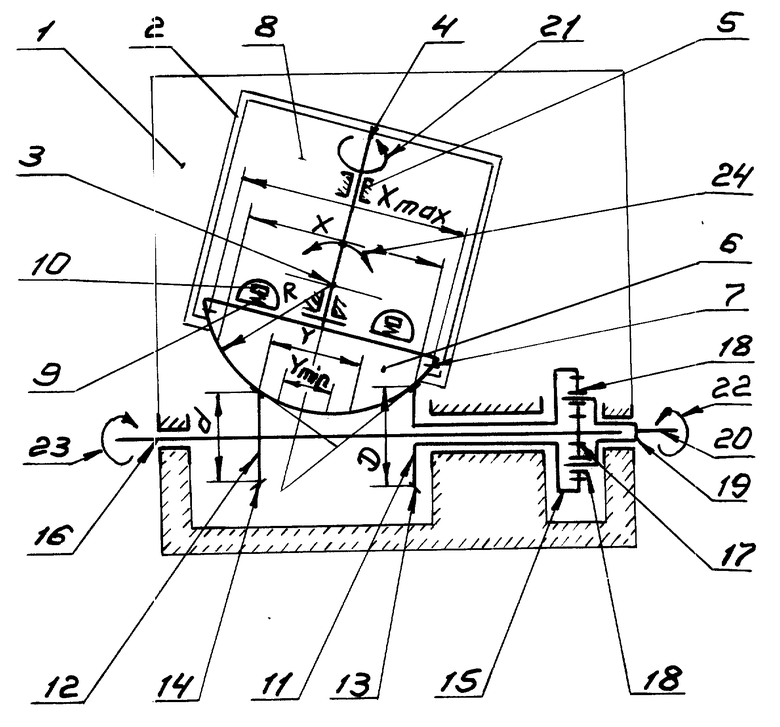
Привод с замкнутой кинематической цепью, содержащий ведущий и ведомый элементы, зубчатую планетарную передачу, одно из кинематических звеньев которой непосредственно связано с ведомым элементом, механизм изменения передаточного отношения и механизм прижима контактирующих поверхностей, отличающийся тем, что он снабжен вторым ведомым элементом, непосредственно связанным с вторым кинематическим звеном зубчатой планетарной передачи, а третье кинематическое звено зубчатой планетарной передачи непосредственно связано с выходным валом привода, ведомые элементы выполнены с коническими контактирующими поверхностями, имеющими разные расчетные диаметры и ширину дорожек качения, и расположены несимметрично относительно оси вращения ведущего элемента, который выполнен со сферической поверхностью, взаимодействующей с коническими поверхностями ведомых элементов с возможностью перемещения ведущего элемента относительно ведомых, механизм изменения передаточного отношения выполнен в виде поворотной плиты с осью поворота, продолжение которой совпадает с центром сферической поверхности ведущего элемента, а механизм прижима контактирующих поверхностей содержит установленную на поворотной плите подвижную плиту с установленным на ней упомянутым ведущим элементом, упоры, жестко закрепленные на поворотной плите, и пружины, упирающиеся в упоры и в поворотную плиту.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пронин Б.А., Ревков Г.А | |||
| Бесступенчатые клино-ременные и фрикционные передачи | |||
| - М.: Машиностроение, 1980, с.299, рис | |||
| Пружинная погонялка к ткацким станкам | 1923 |
|
SU186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.306, рис | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1597476, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 1364795, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Волков Д.П., Крайнев А.Ф | |||
| Трансмиссии строительных и дорожных машин | |||
| - М.: Машиностроение, 1974, с.329, табл.38, схема 38. | |||
