Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) для обработки сигнала.
В современных РЛС широко используются сигналы достаточно большой длительности с внутриимпульсной модуляцией (Справочник по радиолокации под ред. М. Сколника, т.3, М.: Сов.радио, 1979, с.400,402).
Увеличение длительности импульса позволяет увеличить энергию сигнала при сохранении импульсной мощности, а введение внутриимпульсной модуляции обеспечивает разрешающую способность РЛС по дальности. В процессе обработки такого сигнала обеспечивают временное сжатие импульса в согласованном фильтре.
Выходной сигнал после согласованной обработки состоит из сжатого импульса, временное положение которого соответствует по дальности положению объекта (главный лепесток или в дальнейшем - сигнал), и ряда дополнительных откликов (боковых лепестков), соответствующих другим значениям дальности - ложным положениям объекта.
Боковые лепестки существенно меньше по мощности, чем сигнал. Так, для прямоугольного сигнала с линейной частотной модуляцией (ЛЧМ) максимальный уровень бокового лепестка (УБЛ) на 13,2 дБ ниже сигнала (там же, с.433 рис. 25 и с. 434, табл.9). Поэтому подавляют боковые лепестки за счет сравнения амплитуды колебания с порогом, который устанавливают выше максимального УБЛ. Но при большом уровне принимаемого колебания наличие боковых лепестков может вызвать ложное обнаружение, при этом вместо одного объекта будет обнаружено несколько ложных, смещенных относительно истинного по дальности. Это приведет к возрастанию уровня ложной тревоги.
Известен способ обработки сигнала, основанный на фазовом различении (там же, с.172), когда ограничивают принимаемое колебание на уровне, значительно ниже уровня шумов. При этом для широкополосного сигнала соотношение сигнал/шум после ограничения и сжатия колебания уменьшается незначительно (менее, чем 1 дБ, см. там же, с.173) по сравнению со сжатием колебания без ограничения, так что
σ∂i, σ0 - дисперсия шума после обработки на входе с ограничением и без ограничения, соответственно;
Uoi - уровень сигнала после сжатия сигнала без ограничения;
Uогр - максимально возможный уровень сигнала после обработки с ограничением (определяется уровнем ограничения колебаний и базой сигнала).
Уровень сигнала после обработки с ограничением не может быть выше Uогр, а за счет воздействия шума с вероятностью P(U∂≤ Uогр-Kσ∂i) будет равен
U∂i≤ Uогр-Kσ∂i (2)
Причем вероятность U∂ будет тем выше, чем меньше коэффициент K, например, при K = 0, P (P(U∂≤ Uогр-Kσ∂i)) = 1, а при K → 3,P(U∂≤ Uогр-3σ∂i) → 0.03..
На основании (1) и (2) для i-го сигнала получим:
Недостаток этого способа состоит во взаимном подавлении сигналов от близкорасположенных объектов за счет перекрытия колебаний (там же, с.173). Хотя фильтр сжатия после ограничения обеспечивает разрешение этих колебаний, но уровень их будет ниже, чем от одиночного объекта. Это приведет к уменьшению максимальной дальности обнаружения групповых объектов.
Наиболее близким техническим решением является весовая обработка принимаемого колебания (там же, с.430). Суть ее состоит в том, что формирование сжатого импульса осуществляют при огибающей частотного спектра, не совпадающей со спектром излученного сигнала. Сжатие сигнала осуществляют, например, путем суммирования частей колебания, снимаемых с отводов линии задержки (ЛЗ). После суммирования частей сигнала получают сжатый сигнал, амплитуду которого и сравнивают с пороговым уровнем.
Наиболее распространенным видом весовой обработки является обработка по Хэммингу, поскольку она дает уменьшение бокового лепестка с минус 13,2 дБ до минус 42,8 дБ при приемлемых расширении сигнала на 1,44 дБ и уменьшении отношения сигнал/шум на 1,34 дБ.
Недостаток этого способа состоит в том, что ухудшаются условия обнаружения групповых объектов за счет расширения главного лепестка.
Заявляемое изобретение направлено на решение следующей задачи: обнаружение групповых объектов, сигналы от которых частично перекрываются.
Эта задача решается на основе использования явления взаимного подавления перекрывающихся сигналов при их сжатии после ограничения. Указанный результат достигается тем, что в известном способе обработки радиолокационного сигнала, основанном на весовой обработке принимаемого колебания и сравнении полученного сигнала с порогом U0, согласно изобретению, дополнительно проводят весовую обработку колебания после его ограничения и принимают решение об обнаружении групповых объектов, если уровень сигнала после основной обработки достигает значения Uoi, а после дополнительной - ниже уровня U∂i, соответствующего значению Uoi, а также при отсутствии операций по различению сигнала и его боковых лепестков в основной обработке принимают решение о наличии групповых объектов, если, кроме того, уровень сигнала после дополнительной обработки выше уровня бокового лепестка сигнала с ограничением.
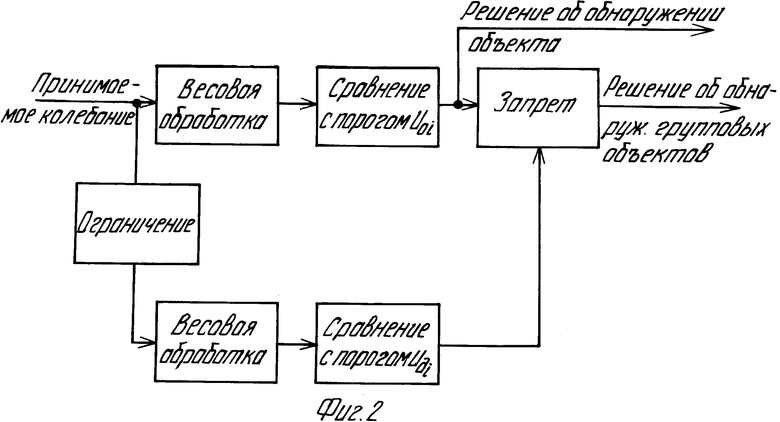
Изобретение иллюстрируется чертежами. На фиг. 1 изображена последовательность операций известного способа весовой обработки. На фиг. 2 и фиг. 3 приведена схема выполнения операций.
Суть изобретения состоит в том, что наряду с обработкой по известному способу (см. фиг.1), когда проводят весовую обработку принимаемого колебания и сравнивают полученный сигнал с порогом Uoi, проводят точно такую же или аналогичную весовую обработку, но после ограничения колебания, и сравнивают полученный сигнал с порогом U∂i, величина которого соответствует величине Uoi. При этом, если принятое колебание от одиночного объекта после основной обработки образует сигнал, величина которого достигает величины Uoi, то сигнал после дополнительной обработки в соответствии с (3) достигает с вероятностью Pi= I - Pi(U∂i) величины U∂i. При приеме же перекрывшихся колебаний от групповых объектов и такого же уровня сигнал после основной обработки также достигнет уровня Uoi, а после ограничения будет ниже уровня U∂i за счет взаимного их подавления. Это и является признаком для обнаружения групповых объектов.
На этом и основано предлагаемое техническое решение. Последовательность операций способа приведена на фиг.2.
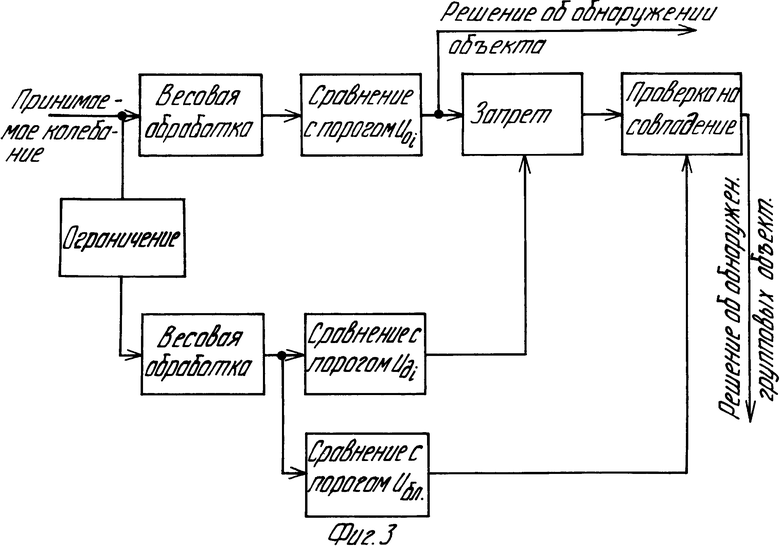
Если в основной обработке отсутствуют операции, обеспечивающие различение сигнала и его боковых лепестков, то дополнительным условием принятия решения о наличии групповых объектов должно быть условие превышения сигналом после дополнительной обработки уровня наибольшего бокового лепестка, который за счет ограничения колебания фиксирован и зависит для одиночного объекта только от вида весовой функции.
Последовательность операций способа с этим дополнением иллюстрируется на фиг.3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2112992C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА И БЛОКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156476C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛА И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2167494C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА И СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1997 |
|
RU2121156C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2345382C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1997 |
|
RU2126543C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2226704C2 |
| УСТРОЙСТВО ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА И АНТЕННА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2187128C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА И РЛС ДЛЯ РЕАЛИЗАЦИИ КОМПЛЕКСА | 1998 |
|
RU2127436C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2319978C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях для обработки сигнала. В основу изобретения положена техническая задача по обнаружению групповых объектов, сигналы от которых перекрываются. Решение задачи основывается на использовании явления взаимного подавления перекрывающихся колебаний в ограничителе. Для этого в известном способе обработки радиолокационного сигнала, основанном на весовой обработке принимаемого колебания и сравнения полученного сигнала с порогом U0, дополнительно проводят весовую обработку колебания после его ограничения и принимают решение об обнаружении групповых объектов, если уровень сигнала после основной обработки достигает значения U0 i, а после дополнительной - ниже U∂i, соответствующего значению U0 i, а также, при отсутствии операций по различению сигнала и его боковых лепестков в основной обработке, принимают решение о наличии групповых объектов, если кроме того уровень сигнала после дополнительной обработки выше уровня бокового лепестка сигнала с ограничением. 1 з.п.ф-лы. 1 з.п. ф-лы, 3 ил.
| Радиотехника и электроника, том | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Съемный резец для врубовых машин | 1924 |
|
SU1877A1 |
| М.Сколник, Справочник по радиолокации, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ получения сульфокислот из нефтяных масел | 1911 |
|
SU428A1 |

