Изобретения относятся к области радиолокации и могут быть использованы в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства.
Для обеспечения управления и контроля нужно прежде всего обнаруживать объекты с высокой вероятностью на границе контролируемой зоны, измерять их координаты с точностью по дальности 20 - 30 м, по углам 20'-40', а также разрешать объекты, разнесенные относительно РЛС на 1o - 2o.
Как правило, для выполнения этих функций используют РЛС с игольчатой формой диаграммы направленности антенны (ДНА). Требуемую точность измерения дальности при этом обеспечивают за счет применения широкополосных сигналов (Справочник по радиолокации под ред. М.Сколника, М., "Сов.радио", т. 1, 1976, с. 16).
Точность измерения угловых координат обеспечивают за счет обработки информации, содержащейся в отраженных сигналах, принимаемых при различных положениях ДНА. Чаще всего применяют одноканальный метод весовой обработки пакета отраженных сигналов (Теоретические основы радиолокации под ред. Я.Д.Ширмана, Сов. Радио, М., 1970, с. 276), разновидностью которого является метод определения координат центра пакета (там же, с. 284).
Среднеквадратичная ошибка измерения угловой координаты, обеспечиваемая этим методом, будет равна (там же, с. 290)
где q - отношение сигнал/шум;
θA - ширина ДНА, определяется выражением (там же, с. 291)
где λ - длина волны РЛС,
d - размер апертуры антенны.
Из (1) и (2) следует
Значение d ограничивается конструктивными требованиями, поэтому заданное значение σθ обеспечивают путем выбора отношения
Разрешающая способность по угловым координатам PЛC-Δθ, в основном, определяется шириной луча ДНA-θA, т.е. фактически λ (при ограниченном d).
Таким образом, в соответствии с (4) выбором соответствующего значения q можно обеспечить требуемое значение σθ для широкого диапазона значений λ, однако условие обеспечения Δθ ограничивает величину λ.
Таким образом, для больших значений λ может быть обеспечена требуемая точность измерения угловой координаты лишь одиночного объекта при достаточной величине q, а для неразрешаемых объектов при этом может быть обеспечена требуемая точность измерения угловой координаты только центра пакета, что не дает полной информации ни о количестве объектов в группе, ни об их угловых координатах.
Для точного измерения угловых координат групповых объектов необходимо выполнить требование по разрешающей способности, это и определяет верхнюю границу значения λ.
Поэтому в качестве обзорных РЛС, как правило, используют S-диапазон (λ = 7 - 15 см) (Справочник по радиолокации под ред. М.Сколника, М., "Сов.радио", Т. 1, 1976, с. 21). В качестве типовой обзорной РЛС S-диапазона может служить RAT-31S ("Радиоэлектроника за рубежом", N 17, 1980, с. 23), применяемая в системах УВД и ПВО. Эта РЛС обнаруживает воздушные объекты с эффективной площадью рассеяния (ЭПР) σ = 3м2 на дальности 100 км.
Если объект имеет σ < 3м2, то для обнаружения его на тех же рубежах потребуется увеличить затраты энергии на обзор одних направлений зоны обзора в ущерб другим. Эта проблема возникает при решении задачи обнаружения малозаметных объектов, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, т.е. с малой ЭПР, так и объекты, созданные по технологии Stealth (Interavia, 1987, IV, p. 331-333), что эквивалентно также малой ЭПР. Так, если ЭПР малозаметного объекта составляет, например, величину 0,1 м2, то для его обнаружения на дальности 100 км необходимо увеличить затраты энергии RAT-31S в 30 раз.
Таким образом, недостаток способа обнаружения и сопровождения объектов в коротковолновом диапазоне (например, S-диапазоне) состоит в необходимости больших затрат СВЧ-энергии на обнаружение и сопровождение объектов, что приводит к увеличению материальных затрат и к ухудшению экологической обстановки в зоне расположения РЛС.
Известен способ радиолокационного обнаружения и сопровождения объектов, основанный на обзоре пространства длинноволновой РЛС (РЛСд) и передаче данных сопровождения объектов на коротковолновую РЛС (РЛСк), которая после обнаружения по этим данным объекта осуществляет его сопровождение с более высокой разрешающей способностью и точностью измерения координат (Interavia, 1987, IV, p.p. 331-333).
Эффективность способа основана на том, что современные летательные аппараты (ЛА) имеют в длинноволновом диапазоне ЭПР значительно выше, чем в коротковолновом диапазоне. Так, например, в УВЧ-диапазоне (λ = 30 см - 1 м) ЭПР в 7 раз выше, чем в S-диапазоне, а для перспективных ЛА эта разница составляет 100 раз (БИНТИ-46 (2291), ТАСС 12.11.86).
Это означает, что затраты энергии на обнаружение перспективных ЛА в УВЧ-диапазоне при прочих равных условиях потребуются в 100 раз меньше, чем в S-диапазоне.
Но, как уже отмечалось, для получения требуемого разрешения объектов по угловым координатам, а значит, и для их сопровождения необходимо использовать как минимум S-диапазон.
Поэтому в рассматриваемом способе-аналоге предусмотрено, что после обнаружения объекта и сопровождения с достигаемыми РЛСд точностями информацию передают РЛСк, которая после обнаружения по этим данным ведет его сопровождение с более высокой, чем РЛСд разрешающей способностью, а следовательно, и точностью по групповым объектам.
Экономия затрат энергии на обнаружение объектов РЛСк в этом способе по сравнению с предыдущим происходит за счет того, что вместо обзора всего пространства, в процессе которого необходимо было бы излучать энергию в объеме всего контролируемого пространства, излучают ее только в направлениях, в которых РЛСд обнаружила объекты. При этом надежность обнаружения объектов на заданных рубежах можно обеспечить на уровне, достигаемом РЛСд (за счет концентрации энергии в отдельных направлениях), а точность измерения угловых координат групповых объектов - на уровне РЛСк.
Недостаток этого способа обнаружения и сопровождения объектов состоит в сравнительно больших затратах энергии коротковолновой РЛС на обнаружение и сопровождение объектов. Наиболее близким техническим решением является способ радиолокационного обнаружения и сопровождения объектов, основанный на обнаружении объектов, измерении углового размера пакета отраженных от них сигналов и координат его центра с помощью длинноволновой РЛС (РЛСд), на разрешении по этим данным объектов с помощью РЛСк, на привязке их координат к координатам центра пакета, на сопровождении их с помощью РЛСд по центру пакета и повторении операций РЛСк после изменения размера пакета (Патент N 2092868, G 01 S 13/04).
Суть способа состоит в том, что РЛСд выполняет не только функции обзора и обнаружения объектов, но и их сопровождения. Задача обеспечения точности сопровождения групповых объектов, не разрешаемых РЛСд, решается тем, что каждый обнаруженный РЛСд объект дополнительно обнаруживается РЛСк.
В случае групповых объектов с помощью РЛСк они разрешаются и их координаты привязываются к координатам центра пакета отраженных сигналов РЛСд, так что, зная координаты центра пакета (он определяется РЛСд с требуемой точностью в процессе сопровождения не разрешаемых ее объектов) и параметры привязки к нему координат каждого объекта группы, можно всегда вычислить координаты каждого объекта. Если же произойдет маневр объектов группы относительно друг друга, т.е. изменение параметров привязки, то это событие будет обнаружено РЛСд по изменению размера пакета и операция РЛСк по разрешению объектов будет повторена, в результате чего будут определены новые параметры привязки.
В способе-прототипе экономия энергетических затрат будет достигнута за счет того, что функции сопровождения объектов будут переданы от РЛСк к РЛСд.
Для реализации этого способа необходим комплекс из коротковолновой и длинноволновых РЛС.
Известно использование комплекса приемопередающих модулей в многопозиционной радиосистеме (МРС) (Кондратьев В.С. и др. Многопозиционные радиотехнические системы, "Радио и связь", М., 1986, с. 14, 15). МРС состоит из пункта излучения, разнесенных в пространстве пунктов приема и пункта обработки информации.
Комплекс может работать и в активном и пассивном режиме. Недостаток его при работе в активном режиме состоит в том, что он работает в одном частотном диапазоне и его характеристики в обнаружении малозаметных объектов будут, практически, совпадать с характеристиками автономной РЛС (см. выше).
Наиболее близким техническим решением объединения нескольких РЛС является объединение (комплексирование) для использования их информации в третичной обработке (Справочник по основам радиолокационной техники под ред. Дружинина В.В., Воениздат, 1967, с. 548).
Блок-схема такого комплекса-прототипа приведена на фиг. 1 (там же с. 551, рис. 12.20). Работа комплекса основана на объединении в устройстве обработки информации по определенным правилам (там же, с. 552-557), поступающей от независимо работающих РЛС информации.
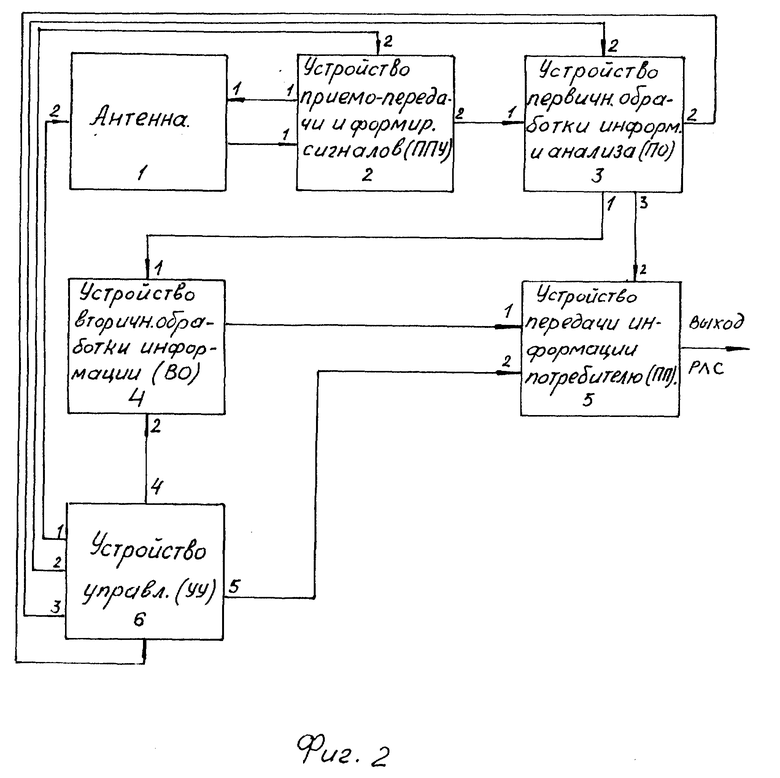
Каждая из РЛС, входящих в такой комплекс, может быть построена по классическому варианту (Кузьмин С.С. Основы проектирования систем цифровой обработки радиолокационной информации, "Радио и связь", М., 1986, с. 17) и содержать (см. фиг. 2) антенну 1, 1-й вход-выход которой соединен с 1-м выходом - 1-м входом устройства 2 приемопередачи и формирования сигналов (ППУ), выход которого соединен с 1-м входом устройства 3 первичной обработки информации и анализа внешних условий (ПО), 1-й выход ПО соединен с 1-м входом устройства 4 вторичной обработки информации (ВО), выход которого соединен с 1-м входом устройства 5 передачи информации потребителю (ПП), 3-й вход которого соединен с 3-м выходом устройства 3 - ПО, 2-й выход ПО соединен со входом устройства 6 управления (УУ), 1-й, 2-й, 3-й, 4-й, 5-й выходы которого соединены со 2-ми входами соответственно антенны 1, устройств 2 - ППУ, 3 - ПО, 4 - ВО, 5 - ПП, выход устройства 5 ПП является выходом РЛС.
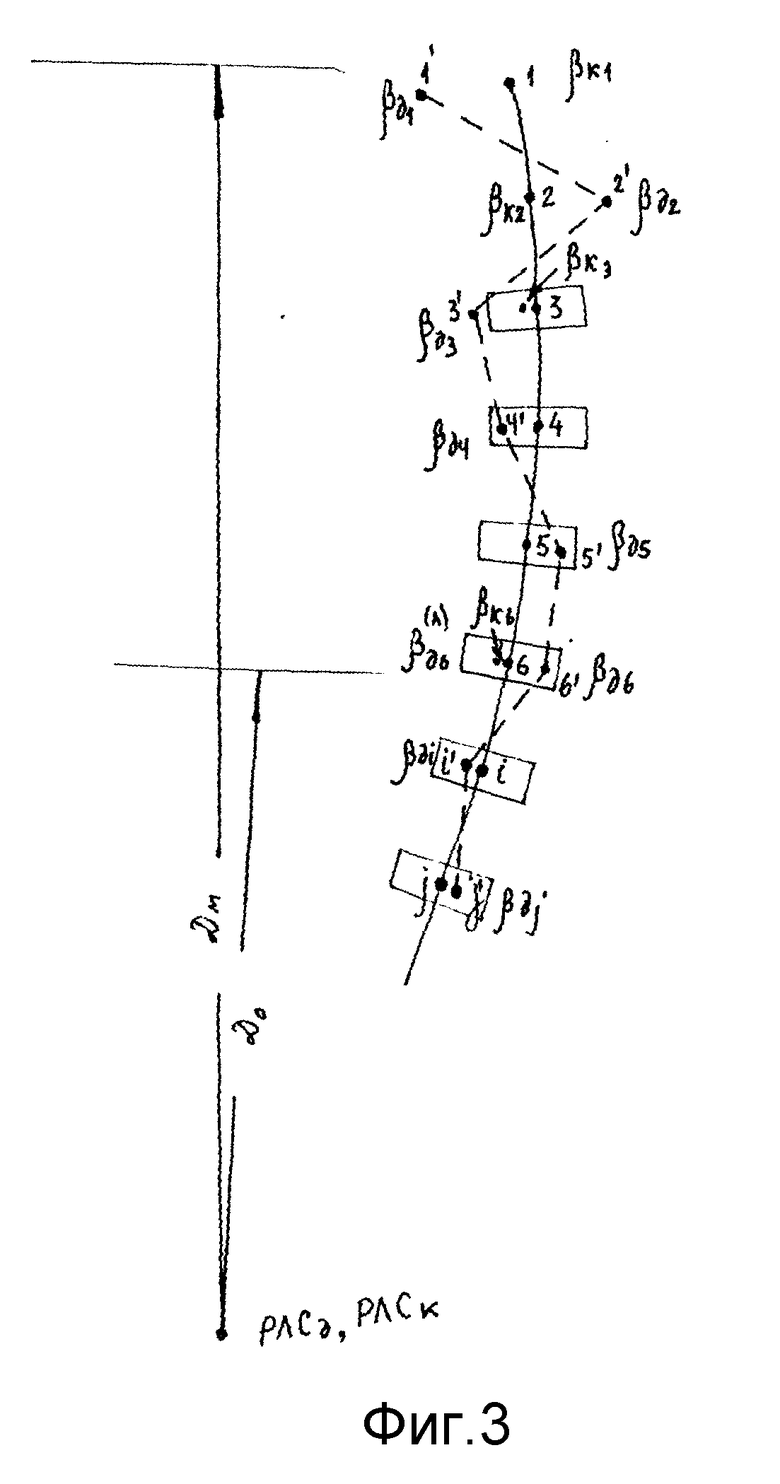
Недостаток способа-прототипа состоит в том, что он не может обеспечить требуемой точности сопровождения при малых значениях q, т.к. в соответствии с (1) величина ошибки может превысить допустимую величину, определяемую требованиями к РЛС. Это означает, что при обнаружении, например, одиночного объекта с помощью РЛСд на максимальной дальности Dм (см. фиг. 3) координата центра пакета βд1 из-за действия шумов будет иметь отклонение от координаты объекта βк1, определенной с помощью РЛСк, на величину Δβ1 = |βк1-βд1|.
В связи с тем, что это отклонение носит случайный (шумовой) характер, оно при экстраполяции координат (Справочник по основам радиолокационной техники под ред. В.В. Дружинина, Военное изд., МО СССР, М., 1967, с. 543), выполняемой в процессе сопровождения, будет усредняться. Но мгновенное значение координаты βдj, полученное в j-й период обзора пространства, может иметь ошибку, превышающую допустимое (пороговое) значение, которое определяется, как уже отмечалось, требованиями к РЛС. Кроме того, могут появляться еще и ложные объекты.
Из-за действия шумов будет изменяться в широких пределах и размер пакета, что вызовет необходимость излишне часто повторять операции РЛСк.
По мере роста q за счет приближения объекта к РЛСд величина σθ в соответствии с (1) будет уменьшаться и достигнет требуемого значения, когда расстояние до объекта сократиться до значения D0 (см. фиг. 3).
Отсюда следует, что на интервале дальности до объекта от Dм до D0 способ-прототип не применим, а потому затраты энергии РЛСк на этом интервале не могут быть сокращены. Недостаток комплекса-прототипа состоит в том, что каждая его РЛС осуществляет регулярный обзор всего заданного пространства и потому возможность концентрации энергии РЛС в отдельных направлениях исключена, что приведет к большим затратам энергии РЛСк.
Недостаток РЛС-прототипа состоит в том, что она не может получать и использовать информацию других РЛС и потому работает во всей заданной зоне обзора, т.е. как автономная РЛС (например, RAT-31S, см. выше).
Заявляемое изобретение направлено на решение следующей задачи: сокращение затрат энергии РЛСк на сопровождение объектов, обнаруженных РЛСд, и при малом отношении сигнал/шум.
Эта задача решается на основе привлечения РЛСк для уточнения координат, когда ошибка в их измерении с помощью РЛСд может превысить допустимое значение, или еще тогда, когда наряду с обнаружением РЛСд истинного объекта обнаруживается ложный, т.е. когда появляется неопределенность в сопровождении.
Указанный результат достигается тем, что в способе радиолокационного обнаружения и сопровождения объектов, основанном на обнаружении, измерении параметров пакета отраженных сигналов с помощью длинноволновой РЛС (РЛСд), разрешении объектов с помощью коротковолновой РЛС (РЛСк), привязке их координат к координатам центра пакета, сопровождении их с помощью РЛСд по центру пакета, согласно изобретению с помощью РЛСк уточняют координаты сопровождаемых объектов, если погрешность их измерений РЛСд может оказаться больше допустимой: если измеренные значения координат центра пакета отклонились от экстраполированных больше допустимой величины или обнаружен признак маневра объекта, например изменилась скорость его движения или в сопровождении возникли дополнительные варианты привязки объектов к трассам.
Указанный результат достигается также тем, что в радиолокационном комплексе для обнаружения и сопровождения объектов, состоящем из n+1 РЛС, согласно изобретению одна РЛС выполняется в коротковолновом диапазоне (РЛСк), а n≥1 РЛС - в длинноволновом (РЛСд), при этом выход РЛСд соединен со входом РЛСк, а выход РЛСк является выходом комплекса, а также тем, что дополнительный выход РЛСк соединен со входом РЛСд.
Указанный результат достигается также тем, что в РЛС, содержащую антенну, 1-й вход-выход которой соединен с 1-м выходом - 1-м входом устройства приемопередачи и формирования сигналов (ППУ), выход которого соединен с 1-м входом устройства первичной обработки информации и анализа внешних условий (ПО), 1-й выход ПО соединен с 1-м входом устройства вторичной обработки информации (ВО), выход которого соединен с 1-м входом устройства передачи информации потребителю (ПП), 2-й выход ПО соединен со входом устройства управления (УУ), 1-й, 2-й, 3-й, 4-й, 5-й выходы которого соединены со 2-ми входами соответственно антенны, устройств ППУ, ПО, ВО, ПП, при этом выход устройства ПП является выходом РЛС, согласно изобретению введено устройство приема информации, выход которого соединен с 3-м входом ВО, а n≥1 входов являются входами РЛС, устройство ПП выполняют с K≥1 выходами, (K-1) из которых являются дополнительными выходами РЛС, а также тем, что согласно изобретению 2-й выход ВО соединен со 2-м входом УУ.
Суть изобретений поясняется с помощью иллюстраций.
На фиг. 1 приведена блок-схема комплекса-прототипа РЛС.
На фиг. 2 - блок-схема РЛС-прототипа.
На фиг. 3 изображены сплошной линией трасса объекта, построенная на основе экстраполяции координат, вычисленных на основе измерений РЛСд и РЛСк, а пунктиром трасса, построенная по фактическим данным РЛСд (по цвету пакета), точки 1'-6', i', j' - положения объекта на этой трассе; βдj и βкj - значения координат, измеренных соответственно РЛСд и РЛСк в j-й период обзора; точки 3-6, i, j - положения объекта, определенные с помощью экстраполяции его координат, выполненной на основе измерений с помощью РЛСд и РЛСк, а прямоугольники вокруг этих точек - стробы сопровождения, определяющие допустимые значения отклонений измеренных координат; β
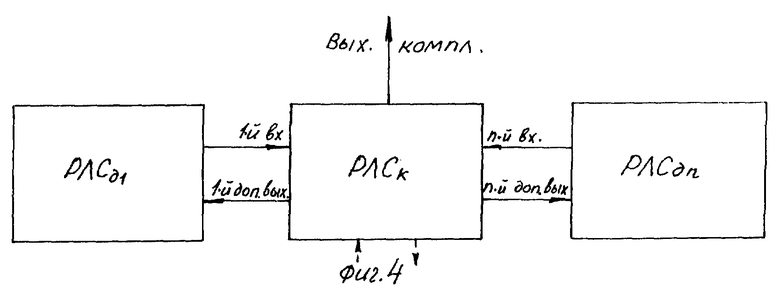
На фиг. 4 - блок-схема заявляемого комплекса для реализации заявляемого способа.
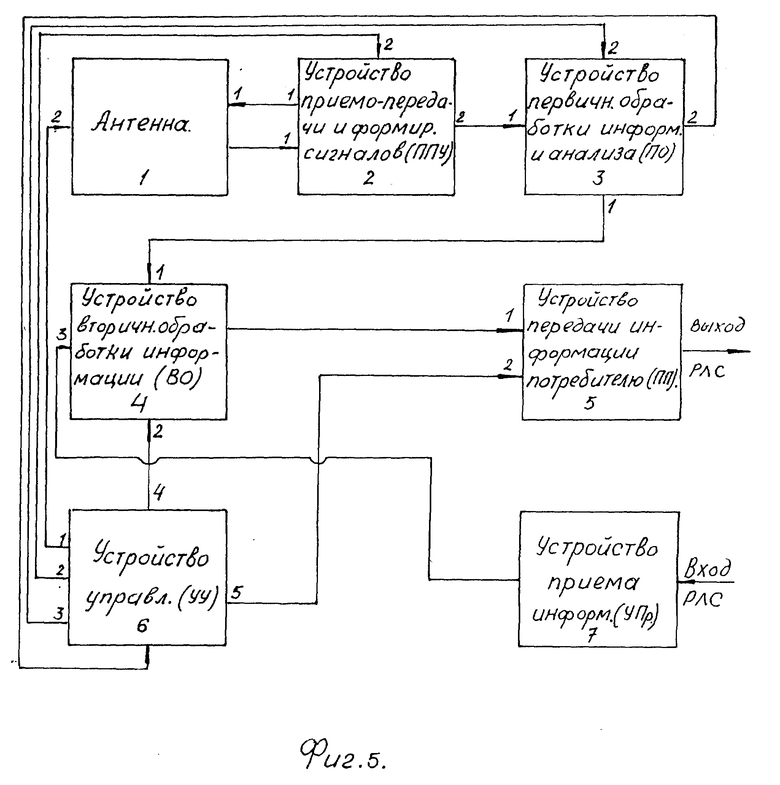
На фиг. 5 - блок-схема длинноволновой РЛС.
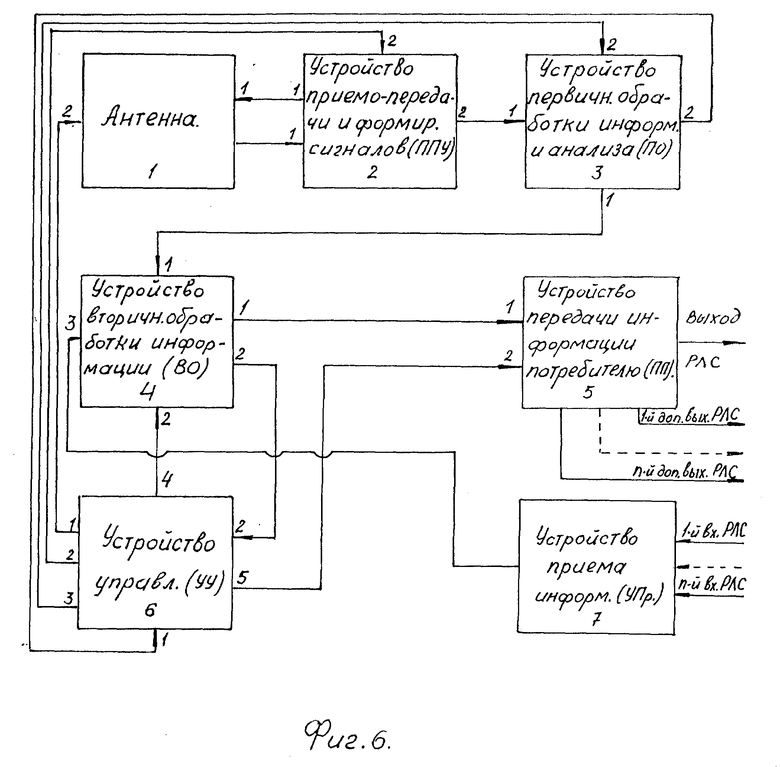
На фиг. 6 - блок-схема коротковолновой РЛС.
Заявляемый способ радиолокационного обнаружения и сопровождения объектов реализуется с помощью комплекса (фиг. 4), который содержит РЛСк и n≥1 РЛСд. РЛСк взаимосвязана с каждой из РЛСд. Причем по i-му входу на РЛСк поступает информация от i-й РЛСд (РЛСдi) о параметрах сигналов, отраженных от объектов, и координатах объектов (в т.ч. их скорость), а с i-го дополнительного выхода на вход РЛСдi поступает уточненная информация о координатах объектов, выход РЛСк является выходом комплекса.
Число n входящих в комплекс РЛСд выбирается в зависимости от возможной насыщенности объектами контролируемого пространства, которое может быть поделено на n зон. При этом взаимодействие РЛСк с каждой РЛСд будет одинаковым и определяться заявленным способом.
Комплекс реализуется с помощью РЛСд (фиг. 5), которая содержит антенну 1, 1-й вход-выход которой соединен с 1-м выходом - 1-м входом устройства 2 приемопередачи и формирования сигналов (ППУ), выход которого соединен с 1-м входом устройства 3 первичной обработки информации и анализа внешних условий (ПО); 1-й выход устройства 3 ПО соединен с 1-м входом устройства 4 вторичной обработки информации (ВО), выход которого соединен с 1-м входом устройства 5 передачи информации потребителю (ПП), 2-й выход ПО соединен со входом устройства 6 управления (УУ), 1-й, 2-й, 3-й, 4-й, 5-й выходы которого соединены со 2-ми входами соответственно антенны 1, устройств 2 - ППУ, 3 - ПО, 4 - ВО, 5 - ПП, устройство 7 приема информации (УПр), выход которого соединен с 3-м входом устройства 4 ВО, а вход является входом РЛС, выходом РЛС - выход устройства 5 ПП. Комплекс реализуется также с помощью РЛСк (фиг. 6), которая отличается от РЛСд (фиг. 5) тем, что в нее введена дополнительная связь 2-го выхода устройства 4 ВО со 2-м входом устройства 2 УУ, и тем, что устройство 5 дополнительно имеет n выходов, являющихся n дополнительными выходами РЛС, а устройство 7 - n входов, являющихся входами РЛС.
Процесс обнаружения и сопровождения объекта по предлагаемому способу состоит в следующем (см. также Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. "Радио и связь", М., 1986, с. 109).
При проведении обзора с помощью РЛСд обнаруживают на расстоянии Dм объект с координатой βд1 с помощью РЛСк, как это предусмотрено прототипом, уточняют эту координату, получают ее значение βк1 (точка 1).
Во втором периоде с помощью РЛСд и РЛСк определяют координаты соответственно βд2 и βк2.
По результатам двух обзоров РЛСк проводят экстраполяцию и определяют положение объекта в 3-м периоде обзора точкой 3 и выставляют вокруг этой точки строб сопровождения; фактически же в 3-м периоде с помощью РЛСд получают значение - βд3 и эта точка не попадает в строб сопровождения, поэтому с помощью РЛСк уточняют координату, получают значение βк3.
На основе этих данных проводят экстраполяцию, определяют положение объекта в 4-м периоде и выставляют строб.
Фактически измеренное значение в 4-м периоде βд4, попадает в строб, поэтому РЛСк для уточнения координат не используется и для 5-го периода проводят вычисление координат экстраполированной точки и т.д.
Если, например, в 6-м периоде обзора РЛСд возникает ложный объект с координатой β
В этом случае с помощью РЛСк определяют координату объекта βк6. Аналогичная ситуация может возникнуть при перекрытии стробов двух трасс (там же, с. 119, 2 абз. сверху).
Кроме того, если РЛСд обнаружила изменение скорости объекта, что может служить признаком маневра, то в этом случае также уточняют координаты с помощью РЛСк.
При достижении объектом рубежа D0, когда значение q станет достаточным, отклонение координат центра пакета от вычисленных на основе экстраполяции с большой вероятностью будет меньше порогового значения, но если произойдет отклонение измеренных координат от координат экстраполированной точки больше порога или возникает неоднозначность в сопровождении (вероятность этих событий мала, но не равна нулю), то РЛСк будет привлечена для уточнения координат.
Работа РЛСд (например, РЛСд1 на фиг. 4), РЛСк и построенного на их основе комплекса состоит в следующем.
В устройстве 3 первичной обработки информации (ПО) РЛСд (фиг. 5) на основе обработки пакета отраженных сигналов принимается решение об обнаружении объекта с координатами Dм и βд1/ (фиг. 3) (Справочник.... под ред. Дружинина В.В. с. 527, 538, 541). Эта информация вводится со входа 3 в устройство 4 ВО (фиг. 6), которое вырабатывает стробы просмотра с помощью РЛСк участка пространства, где РЛСд обнаружила объект и передает информацию о стробах с выхода 2 на вход 2 устройства 6 УУ, которое управляет положением луча с выхода 1, формированием сигнала в устройстве 2 ППУ с выхода 2 и устройством 3 ПО (стробирается по дальности) с выхода 3.
По этим данным луч антенны 1 РЛСк устанавливается в нужном направлении, а устройство 3 ПО обнаруживает на дальности Дм-ΔД(t) объект, измеряет его угловую координату βк1 и подает эту информацию на вход 1 устройства 4 ВО, которое передает уточненные координаты объекта с выхода 1 на вход 1 устройства 5 ПП, которое в свою очередь передает их через 1-й дополнительный выход РЛСк (фиг. 4, 6) на вход РЛСд (фиг. 4, 5). РЛСд использует эту информацию для уточнения трассы объекта. После того, как на РЛСк будут вырабатываться стробы сопровождения, на РЛСд могут передаваться параметры более точных, чем на РЛСд стробов сопровождения.
На РЛСд с помощью устройства 7 УПр со входа (фиг. 4, 5) принимают от РЛСк информацию и через вход 3 вводят ее в устройство 4 ВО, в котором она используется для экстраполяции координат объектов и их сопровождения, поскольку она позволяет выполнять эти операции точнее, чем только данные РЛСд. При отсутствии данных РЛСк, например, в 4-м периоде (см. фиг. 3) экстраполяцию осуществляют в РЛСд и в РЛСк на основе данных РЛСд.
После измерения координат объекта во 2-м периоде с помощью РЛСд в устройстве 3 ПО измеряется еще одна координата объекта - скорость, информация об этом передается вместе с параметрами пакета сигналов на РЛСк через устройство 4 ВО.
Следует отметить, что комплекс может быть реализован и при использовании известной РЛСд (фиг. 2), в этом случае дополнительный выход РЛСк не будет использован (фиг. 4, связь 1-й доп. выход будет отсутствовать) и сопровождение на РЛСд будет осуществляться с худшими точностями. Этот вариант может быть использован как упрощенный, при отсутствии РЛСд по предлагаемому варианту.
Таким образом, предлагаемые технические решения обеспечивают снижение затрат энергии РЛСк и в дальней зоне работы РЛСд, когда уровень сигнала не обеспечивает с требуемой точностью сопровождения объектов только с помощью РЛСд, и в ближней.
Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства. Технический результат заключается в возможности сопровождения объектов длинноволновой РЛС на предельных дальностях обнаружения. Для этого в способе радиолокационного обнаружения и сопровождения объектов, основанном на обнаружении, измерении параметров пакета отраженных сигналов с помощью длинноволновой РЛС (РЛСд), разрешении объектов с помощью коротковолновой РЛС (РЛСк), привязке их координат к координатам центра пакета, сопровождении их с помощью РЛСо по центру пакета, с помощью РЛСк уточняют координаты сопровождаемых объектов, если погрешность их измерений может оказаться больше допустимой или если измеренные значения координат центра пакета отклонились от экстраполированных больше допустимой величины или обнаружен признак маневра объекта, например изменилась его скорость или в сопровождении возникли дополнительные варианты привязки объектов к трассам. Для этого в радиолокационном комплексе (РЛК) для обнаружения и сопровождения объектов, состоящем из n + 1 РЛС, одну РЛС выполняют в коротковолновом диапазоне (РЛСк), a n≥ 1 РЛС - в длинноволновом (РЛСд), выход РЛСд соединяют со входом РЛСк, а выход РЛСк делают выходом РЛК, а также дополнительный выход РЛСк соединяют со входом РЛСд, а в каждую РЛС введено устройство приема информации, 3 с. и 6 з.п. фл-лы, 6 ил.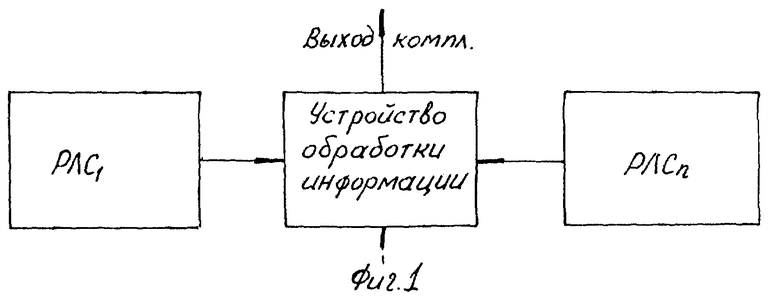
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2092868C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ КООРДИНАТ МАЛОЗАМЕТНЫХ ОБЪЕКТОВ | 1994 |
|
RU2099737C1 |
| Справочник по основам радиолокационной техники /Под ред | |||
| В.В.Дружинина | |||
| - М.: Воениздат, 1967, с | |||
| ПРИБОР ДЛЯ СЪЕМКИ ПЛАНА МЕСТНОСТИ | 1922 |
|
SU548A1 |
| Кузьмин С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| - М.: Радио и связь, 1986, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| US 4377811 A, 22.03.83 | |||
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |
| УШИВАНИЕ ПУПОЧНЫХ ГРЫЖ У СВИНЕЙ ОБВОДНОЙ ЛИГАТУРОЙ | 1997 |
|
RU2137440C1 |

