Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) при обнаружении цели.
В современных РЛС широко используются зондирующие сигналы с внутриимпульсной модуляцией и достаточно большой длительности (Справочник по радиолокации. /Под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.400, 402). Обнаружение сигнала от цели при этом включает временное сжатие принятого сигнала с помощью согласованного фильтра и последующее сравнение его с порогом обнаружения, при превышении которого принимается решение об обнаружении цели (Теоретические основы радиолокации. /Под ред. Ширмана Я.Д., «Сов. радио», 1970, с.110-114, рис.3.19).
Сигнал после согласованной обработки представляет собой сжатый во времени сигнал (импульс), состоящий из главного лепестка, временное положение которого соответствует по дальности положению цели, и ряда дополнительных откликов - боковых лепестков, соответствующих другим (ложным) значениям дальности.
При большом уровне принимаемого сигнала наличие боковых лепестков может вызвать ложное обнаружение, при этом вместо одной цели обнаруживается несколько, что приводит к возрастанию уровня ложной тревоги.
Известны способ и устройство радиолокационного обнаружения цели, в которых для уменьшения влияния боковых лепестков сжатого сигнала используется весовая обработка принимаемого сигнала, проводимая путем его фильтрации с использованием различных весовых функций, например функций Хэмминга, Тейлора и других (Справочник по радиолокации. /Под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.430).
Однако известные технические решения не исключают полностью возможности ложного обнаружения цели за счет боковых лепестков. Кроме того, сигнал, отраженный от цели, может маскироваться боковым лепестком сигнала от другой цели с большим уровнем сигнала, в этом случае групповая цель идентифицируется как одиночная.
Наиболее близким способом радиолокационного обнаружения цели является способ, включающий весовую обработку отраженного от цели принимаемого электромагнитного колебания с использованием n≥2 весовых функций, измерение отношений уровней сигналов после весовой обработки, сравнение сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, с порогом обнаружения, сравнение отношений уровней сигналов с их расчетными значениями и принятие решения об обнаружении одиночной цели (патент РФ №2112992).
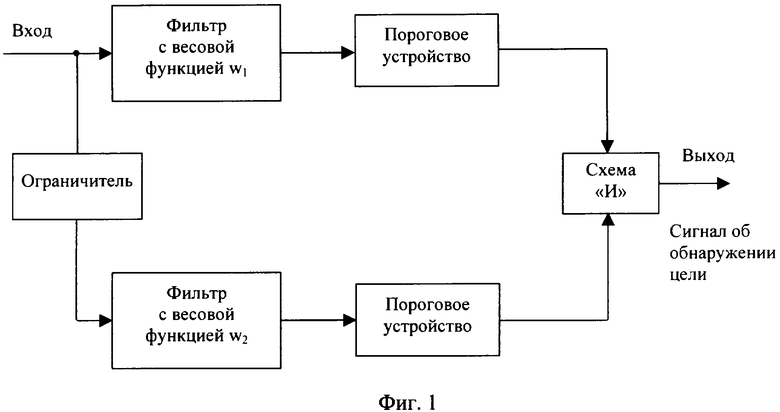
Устройство, наиболее близкое к заявляемому (фиг.1), включает фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, ограничитель, вход которого соединен со входом фильтра с весовой функцией w1, а выход - со входом фильтра с весовой функцией w2, два пороговых устройства, последовательно соединенные с выходами соответствующих фильтров, и схему «И», первый и второй входы которой соединены с выходами соответствующих пороговых устройств, выход схемы «И» является выходом устройства радиолокационного обнаружения цели (патент РФ №2106653).
Недостаток наиболее близкого способа состоит в том, что групповая цель, включающая в себя цель с эффективной поверхностью рассеяния (ЭПР), значительно превышающей ЭПР другой цели, будет обнаружена как одиночная цель, поскольку в этом случае отношение векторных сумм амплитуд бокового лепестка сигнала от первой цели и главного лепестка от второй цели при различных видах весовой обработки может отличаться от единицы больше чем на пороговую величину.
Решаемой задачей (техническим результатом) является обнаружение групповой цели в случае, когда отраженный сигнал от одной одиночной цели маскируется боковыми лепестками сжатого сигнала от другой одиночной цели.
Указанный результат достигается тем, что в способе радиолокационного обнаружения цели, включающем весовую обработку отраженного от цели принимаемого электромагнитного колебания с использованием n≥2 весовых функций, измерение отношений уровней сигналов после весовой обработки, сравнение сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, с порогом обнаружения, сравнение отношений уровней сигналов с расчетными значениями и принятие решения об обнаружении одиночной цели, согласно изобретению дополнительно принимают решение об обнаружении групповой цели, если отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других видов весовой обработки, измеренные в области бокового лепестка сигнала обнаруженной цели, отличаются от расчетных значений этих отношений более чем на установленную для одиночной цели величину и уровень сигнала в области этого лепестка превышает порог обнаружения.
Указанный результат достигается также тем, что весовую функцию весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, выбирают равномерной.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения цели, содержащем фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, первое пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w1, второе пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w2, схему «И», согласно изобретению введены вычислитель отношения сигналов, первое устройство сравнения, устройство задержки, схема стробирования, второе устройство сравнения, первый ключ, третье пороговое устройство, схема «ИЛИ», второе устройство задержки, второй ключ, при этом вход фильтра с весовой функцией w2 соединен со входом фильтра с весовой функцией w1, первый и второй входы вычислителя отношения сигналов соединены с выходами фильтров с соответствующими весовыми функциями, а выход его соединен со входом первого устройства сравнения, выход первого порогового устройства соединен со входом устройства задержки, первый и второй входы схемы «И» соединены с выходом устройства задержки и выходом первого устройства сравнения соответственно, выход схемы «И» соединен со входом схемы стробирования, выход которой соединен с управляющим входом второго ключа, выход вычислителя отношения сигналов соединен также со входом второго устройства сравнения, выход которого соединен с управляющим входом первого ключа, выход фильтра с весовой функцией w1 соединен также со входом третьего порогового устройства, выходы второго и третьего пороговых устройств соединены со входами схемы «ИЛИ», выход которой соединен со входом первого ключа, выход которого соединен со входом второго устройства задержки, выход которой соединен со входом второго ключа, выход которого является выходом устройства радиолокационного обнаружении цели.
Указанный результат достигается также тем, что весовая функция w1 является равномерной.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения цели, содержащем фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, первое пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w1, второе пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w2, схему «И», согласно изобретению введены n фильтров с весовыми функциями w3, ..., wn+2 соответственно, n+1 вычислителей отношения сигналов, n+1 первых устройств сравнения, вторая схема «И» с n+1 входами, первое устройство задержки, схема стробирования, n+1 вторых устройств задержки, n+1 вторых устройств сравнения, первая схема «ИЛИ» с n+1 входами, первый ключ, n+1 третьих пороговых устройств, вторая схема «ИЛИ» с n+2 входами, второй ключ, при этом входы фильтров с весовыми функциями w2, ..., wn+2 соединены со входом фильтра с весовой функцией w1, первые входы n+1 вычислителей отношения сигналов соединены с выходом фильтра с весовой функцией w1, а вторые их входы соединены с выходами n+1 фильтров с весовыми функциями w2, ..., wn соответственно, выходы n+1 вычислителей отношения сигналов соединены со входами соответствующих n+1 первых устройств сравнения, выходы которых соединены с n+1 входами второй схемы «И», вход первого устройства задержки соединен с выходом первого порогового устройства, первый и второй входы схемы «И» соединены с выходом первого устройства задержки и выходом второй схемы «И» соответственно, выход схемы «И» соединен со входом схемы стробирования, выход которой соединен с управляющим входом второго ключа, выходы n+1 вычислителей отношения сигналов соединены также со входами соответствующих n+1 вторых устройств задержки, последовательно соединенных с n+1 соответствующими вторыми устройствами сравнения, выходы которых соединены с n+1 входами первой схемы «ИЛИ», выход первой схемы «ИЛИ» соединен с управляющим входом первого ключа, выход фильтра с весовой функцией w1 и выходы фильтров с весовыми функциями w3, ..., wn соединены также со входами соответствующих третьих пороговых устройств, выход второго порогового устройства и выходы третьих пороговых устройств соединены с n+2 входами второй схемы «ИЛИ», выход которой соединен со входом первого ключа, выход которого соединен со входом второго ключа, выход второго ключа является выходом устройства радиолокационного обнаружения цели.
Указанный результат достигается также тем, что весовая функция w1 является равномерной.
Поясним суть изобретения.
На фиг.2 проведено сравнение форм сжатого импульса и структуры его боковых лепестков, получаемых при использовании трех весовых функций (Справочник по радиолокации. /Под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.433, рис.25): равномерной весовой функции (кривая А), весовой обработки по Хэммингу (кривая В) и весовой обработки по Тейлору (кривая С).
Из графиков следует, что при использовании равномерной весовой обработки сигнала длительность главного лепестка по нулевому уровню наименьшая и составляет величину Bt (где В - ширина спектра, t - нормированное время), а уровень первого бокового лепестка примерно на 13.4 дБ ниже уровня главного лепестка. При весовой обработке по Тейлору и по Хэммингу главный лепесток расширяется соответственно в 1.8 и 2 раза, а первый боковой лепесток равен соответственно -40.6 дБ и -43.4 дБ.
Если, например, главный лепесток отраженного сигнала от второй цели по времени и по уровню совпал с третьим боковым лепестком сжатого с использованием равномерной весовой обработки отраженного от первой цели сигнала (то есть примерно на 20.7 дБ ниже уровня главного лепестка от первой цели), то во всех известных способах обработки групповая цель будет обнаружена как одиночная. Так, при использовании способа по патенту №2106653 признак групповой цели не будет выдан, поскольку ввиду большого различия в уровнях двух сигналов подавления сигнала от первой цели после ограничения практически происходить не будет.
При использовании наиболее близкого способа по патенту №2112992 сигнал от второй цели не будет обнаружен, поскольку соотношение уровней сигналов после всех видов обработки в интервале времени, соответствующем положению главного лепестка сигнала от второй цели, будет отличаться от единицы больше, чем на пороговую величину, из-за наложения по времени на него бокового лепестка сигнала от первой цели.
В заявляемых технических решениях в качестве признака одиночной цели используется примерное равенство отношений уровней сигнала в области главного лепестка сжатого сигнала после различных видов обработки. Решение об обнаружении такой цели принимают, если уровень сигнала хотя бы после одного вида весовой обработки превышает порог обнаружения (например, при равномерной весовой обработке), а отношение уровней сигналов (δизм один), полученных для главного лепестка сжатого сигнала (например, при равномерной весовой обработке и весовой обработке по Хэммингу или равномерной и при равномерной весовой обработке по Тейлору), отличается от расчетного значения этого отношения (δрас один) не более чем на установленную величину (Δу один), т.е.

Допустимые отличия измеренных отношений от расчетных значений могут быть выбраны, например, в пределах 5% от расчетных значений, т.е. установленная величина Δу один может быть взята 0.05.
В качестве признака групповой цели используется увеличение различий между измеренными отношениями уровней сигнала в области анализируемого бокового лепестка при различных видах весовой обработки (δизм групп) и их расчетными значениями (δрас один), предварительно полученными для одиночной цели:

Указанное увеличение различий происходит за счет наложения главного лепестка сигнала от второй цели на боковой лепесток сигнала от первой цели.
Так, для одиночной цели расчетные отношения уровня сигнала в области, например, 3-го бокового лепестка (Bt=3.5) при равномерной весовой обработке  к уровню сигнала в области того же бокового лепестка при весовой обработке по Хэммингу
к уровню сигнала в области того же бокового лепестка при весовой обработке по Хэммингу  и по Тейлору
и по Тейлору  соответственно равны (фиг.2):
соответственно равны (фиг.2):
где знак (1) означает, что сигнал относится к обнаружению одиночной или первой из группы целей;
знак (2) (далее) означает, что сигнал относится к обнаружению второй цели из группы целей.
Когда на входе системы обработки присутствует сигнал от второй цели, расположенной, например, в области 3-го бокового лепестка сигнала от первой цели (то есть главный лепесток сигнала второй цели находится в точке Bt=3.5), то отношения уровня сигнала в области этого бокового лепестка при равномерной весовой обработке к уровню сигнала в области того же бокового лепестка при весовой обработке по Хэммингу и по Тейлору определяются соответственно в виде

где 

 - уровни боковых лепестков сигнала от 1-й цели при равномерной весовой обработке, весовой обработке по Хэммингу и по Тейлору соответственно;
- уровни боковых лепестков сигнала от 1-й цели при равномерной весовой обработке, весовой обработке по Хэммингу и по Тейлору соответственно;


 - уровни главного лепестка сигнала от 2-й цели при равномерной весовой обработке, весовой обработке по Хэммингу и по Тейлору соответственно.
- уровни главного лепестка сигнала от 2-й цели при равномерной весовой обработке, весовой обработке по Хэммингу и по Тейлору соответственно.
Поскольку уровни сигнала в главном лепестке при всех видах весовой обработки практически одинаковы (т.е.  а боковые лепестки при весовой обработке по Хэммингу и по Тейлору значительно меньше соответствующих боковых лепестков при равномерной весовой обработке (т.е.
а боковые лепестки при весовой обработке по Хэммингу и по Тейлору значительно меньше соответствующих боковых лепестков при равномерной весовой обработке (т.е. 
 то для рассматриваемого примера и
то для рассматриваемого примера и  при обоих видах весовой обработки можно приближенно считать
при обоих видах весовой обработки можно приближенно считать
Для  при двух крайних значениях:
при двух крайних значениях:
1) совпадения по фазе главного лепестка от второй цели и бокового лепестка от первой цели для обоих видов весовой обработки получим 
2) в противофазе (также для обоих видов весовой обработки) - δизм груп≈0.
Отсюда следует, что при наличии групповой цели максимальное отношение сигналов δизм групп равно ˜2, в то время как расчетное значение данного отношения для одиночной цели равно 12. Величина отношения сигналов в области анализируемого бокового лепестка обнаруженного более мощного сигнала и является признаком, по которому одиночная цель отличается от групповой. Решение об обнаружении групповой цели принимают, если отношение уровней сигналов в области бокового лепестка обнаруженного сигнала отличается от их расчетных значений, полученных для одиночной цели, большее чем на установленную для одиночной цели величину, и при этом уровень сигнала в области этого бокового лепестка хотя бы после одного вида обработки превышает порог обнаружения.
Таким образом достигается заявляемый технический результат.
Способ может быть реализован несколькими вариантами устройств.
В п.3 заявлено устройство (фиг.3), которое может быть использовано там, где допустимо снижение разрешающей способности по дальности, которое имеет место при весовой обработке за счет расширения главного лепестка.
В п.5 заявлено устройство (фиг.4), которое может быть использовано там, где требуется чувствительность и разрешающая способность при обнаружении групповой цели, определяемое равномерной весовой обработкой.
Изобретения иллюстрируются следующими чертежами.
Фиг.1 - наиболее близкое устройство обработки радиолокационного сигнала, отраженного от цели.
Фиг.2 - сравнение формы сжатого импульса и структуры боковых лепестков, получаемых при использовании трех весовых функций.
Фиг.3 - заявляемое устройство обнаружения групповой радиолокационной цели с двумя весовыми функциями.
Фиг.4 - заявляемое устройство обнаружения групповой радиолокационной цели с n+2 весовыми функциями.
Устройство радиолокационного обнаружения цели с двумя весовыми функциями по п.3 (фиг.3) содержит фильтр 1 с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр 2 с весовой функцией w2, два пороговых устройства 3, схему «И» 4, вычислитель отношения сигналов 5, первое устройство сравнения 6, устройство задержки 7, схему стробирования 8, второе устройство сравнения 9, первый ключ 10, два третьих пороговых устройства 11, схему «ИЛИ» 12, второе устройство задержки 13, второй ключ 14, при этом вход фильтра 1 с весовой функцией w1 является входом устройства обнаружения радиолокационного сигнала, пороговое устройство 3 последовательно соединено с выходом фильтра 1 с весовой функцией w1, выход порогового устройства 3 соединен со входом устройства задержки 7, первый и второй входы схемы «И» 4 соединены с выходом устройства задержки 7 и с выходом первого устройства сравнения 6 соответственно, вход фильтра 2 с весовой функцией w2 соединен со входом фильтра 1 с весовой функцией w1, первый и второй входы вычислителя отношения сигналов 5 соединены с выходами фильтров с соответствующими весовыми функциями, а выход его соединен со входом первого устройства сравнения 6, выход схемы «И» 4 соединен со входом схемы стробирования 8, выход которой соединен с управляющим входом второго ключа 14, выход вычислителя отношения сигналов 5 соединен также со входом второго устройства сравнения 9, выход которого соединен с управляющим входом первого ключа 10, выходы фильтров 1 и 2 соединены также со входом третьего порогового устройства 11 и входом второго порогового устройства 3 соответственно, выходы которых соединены со входами схемы «ИЛИ» 12, выход схемы «ИЛИ» 12 соединен со входом первого ключа 10, выход которого соединен со входом второго устройства задержки 13, выход которой соединен со входом второго ключа 14, выход которого является выходом радиолокационного устройства обнаружения цели.
Заявляемое устройство может быть выполнено с использованием следующих функциональных элементов.
Фильтр 1, фильтр 2 - цифровые фильтры (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М., «Радио связь», 1986, с.38-45).
Пороговые устройства 3, схема «И» 4, устройство сравнения 6, устройство задержки 7, схема стробирования 8, ключ 10, пороговое устройство 11, схема «ИЛИ» 12, устройство задержки 13, ключ 14 - цифровые элементы, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина, М., Радио и связь, 1984).
Вычислитель отношения сигналов 5 - вычислитель, осуществляющий вычисление отношения сигналов δизм один и δизм груп.
Устройство сравнения 6, устройство сравнения 9 - вычислители, осуществляющие проверку условий (1) и (2) соответственно.
Весовая функция w1 фильтра 1 в данном устройстве выбрана равномерной, весовая функция w2 фильтра 2 - функция Хэмминга.
Рассмотрим работу устройства по п.3.
В соответствии со способом сигнал об обнаружении одиночной цели на выходе схемы «И» 4 должен выдаваться при одновременном выполнении двух условий:
1. уровень сигнала хотя бы после одного вида весовой обработки превышает порог обнаружения (в данном случае после равномерной весовой обработки);
2. отношение уровней сигнала после обеих видов весовой обработки отличается от расчетной, полученной для главного лепестка сжатого сигнала, не большее чем на установленную величину.
Выполнение первого условия проверяется с помощью первого порогового устройства 3, включенного на выход фильтра 1 с равномерной весовой обработкой. Выполнение второго условия проверяется с помощью вычислителя отношения сигналов 5 и первого устройства сравнения 6. Одновременность выполнения 1-го и 2-го условия обеспечивается устройством задержки 7 и анализируется с помощью схемы «И» 4.
В момент образования главного лепестка сжатого сигнала на выходе фильтра 1 образуется сигнал, который подается на вход первого порогового устройства 3 и на первый вход вычислителя отношения сигналов 5. В первом пороговом устройстве 3 сигнал сравнивается с порогом обнаружения, устанавливаемым исходя из допустимой вероятности ложной тревоги при обнаружении цели. При превышении сигналом порога обнаружения на выходе первого порогового устройства 3 формируется сигнал, который поступает на вход устройства задержки 7 и далее на первый вход схемы «И» 4.
В этот же момент на выходе фильтра 2 образуется другой сигнал, который поступает на второй вход вычислителя отношения сигналов 5. С выхода вычислителя отношения сигналов 5 выдается сигнал, пропорциональный отношению измеренных сигналов δизм. В первом устройстве сравнения 6 отношение δизм сравнивается с расчетным значением данного отношения δрас один, и если абсолютная величина разности указанных величин не превышает допустимого значения Δу один (т.е. условие (1) выполняется), то на выходе первого устройства сравнения 6 формируется сигнал, который поступает на второй вход схемы «И» 4. В результате на выходе схемы «И» 4 выдается сигнал об обнаружении одиночной цели.
Когда на выходе фильтров 1 и 2 действует боковой лепесток сжатого сигнала, то на выходе вычислителя отношений 5 выдается величина отношения сигналов δизм групп, значительно отличающаяся от единицы, поскольку уровни боковых лепестков после весовой обработки с равномерной весовой функцией и весовой функцией Хэмминга отличаются на 20-30 дБ. В результате на выходе первого устройства сравнения 6 сигнал выдан не будет. Поэтому, если даже уровень бокового лепестка на выходе фильтра 1 превысит уровень порога обнаружения порогового устройства 3 и на первом входе схемы «И» 4 появится сигнал, то на выходе схемы «И» 4 сигнал выдан не будет.
Сигнал обнаружения групповой цели на выходе устройства обнаружения групповой цели должен выдаваться, если одновременно выполняются следующие условия:
1. обнаружена одиночная цель, т.е. присутствует сигнал на выходе схемы «И» 4;
2. момент времени выдачи сигнала о групповой цели относится к интервалу действия боковых лепестков обнаруженного сигнала;
3. уровень сигнала в области бокового лепестка после хотя бы одного вида обработки превышает порог, устанавливаемый исходя из допустимой вероятности ложной тревоги при обнаружении цели;
4. отношение уровня сигнала в области бокового лепестка сжатого сигнала при использовании одной весовой функции к уровню сигнала в области бокового лепестка сжатого сигнала при использовании другой функции отличается от расчетного значения для одиночной цели больше, чем на установленную величину.
Выполнение второго условия обеспечивается схемой стробирования 8, в которой выставляются стробы по времени, соответствующие положению боковых лепестков, предшествующих и последующих получению сжатого импульса.
С помощью второго устройства задержки 13 обеспечивается совмещение во времени положения боковых лепестков, предшествующих положению сжатого импульса, с положением боковых лепестков, определяемых стробом.
Дальнейшая работа устройства осуществляется следующим образом.
Сигнал с выхода схемы «И» 4 поступает на вход схемы стробирования 8. Положения стробов на выходе схемы стробирования 8 соответствуют положению боковых лепестков, действующих с учетом задержки в устройстве 13 как до образования главного лепестка, так и после него. При этом на управляющий вход второго ключа 14 поступает сигнал, поддерживающий его в открытом состоянии.
Во втором устройстве сравнения 9 осуществляется проверка условия (2). Если на боковой лепесток обнаруженного сигнала накладывается сравнимый с ним по уровню главный лепесток от другой цели, то отношение этих сигналов δизм груп близко к единице, т.е. значительно отличается от расчетного значения этого отношения для одиночной цели. Условие (2) в этом случае выполняется и на выходе второго устройства сравнения 9 формируется сигнал, который поступает на управляющий вход первого ключа 10. В результате первый ключ 10 оказывается открытым.
Если при этом уровень сигнала на выходе фильтра 1 или на выходе фильтра 2 превышает порог обнаружения, то на выходах соответственно третьего порогового устройства 11 или второго порогового устройства 3 формируется сигнал, который проходит через схему «ИЛИ» 12, далее через открытый первый ключ 11 и задержанный во втором устройстве задержки 13 поступает на вход второго ключа 14 в то время, когда на управляющем входе этого ключа действует сигнал с выхода схемы стробирования 8. В результате на выходе второго ключа 14 присутствует сигнал об обнаружении групповой цели.
Недостатки устройства по п.3 состоят в следующем.
Во-первых, устройству присущ указанный ранее недостаток устройства по п.3, заключающийся в том, что для исключения неоднозначности в точке Bt≈1.3 (фиг.2) постоянная времени схемы «И» 4 должна обеспечивать выдачу сигнала с длительностью, равной длительности главного лепестка сжатого сигнала с использованием функции Хэмминга.
Во-вторых, из-за того, что во втором устройстве сравнения 9 уровень порога не изменяется в зависимости от номера бокового лепестка, то интервал уровней, при которых это пороговое устройство не выдает сигнал запрета, определяется исходя из наименьшего расчетного значения отношений уровней боковых лепестков (т.е. для наиболее удаленных от главного лепестка, см. фиг.2). Это означает, что при наложении главного лепестка сигнала от второй цели на ближние боковые лепестки сигнала от первой цели для обнаружения групповой цели требуется достаточно большой уровень сигнала от второй цели.
Указанные недостатки устраняются в устройстве по п.5. Устройство радиолокационного обнаружения цели по п.5 (фиг.4) содержит фильтр 1 с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр 2 с весовой функцией w2, первое пороговое устройство 3, последовательно соединенное с выходом фильтра 1, второе пороговое устройство 3, последовательно соединенное с выходом фильтра 2, схему «И» 4, n фильтров 15 с весовыми функциями w3, ..., wn соответственно, n+1 вычислителей отношения сигналов 16, n+1 первых устройств сравнения 17, вторую схему «И» 18 с n+1 входами, первое устройство задержки 19, схему стробирования 20, n+1 вторых устройств задержки 21, n+1 вторых устройств сравнения 22, схему «ИЛИ» 23 с n+1 входами, первый ключ 14, n+1 вторых пороговых устройств 24, вторую схему «ИЛИ» 25 с n+2 входами, второй ключ 26, при этом вход фильтра 2 и входы фильтров 15 соединены со входом фильтра с весовой функцией w1, первые входы вычислителей отношения сигналов 16 соединены с выходом фильтра 1, а вторые их входы соединены с выходами n+1 фильтров с весовыми функциями w2, ..., wn соответственно, выходы n+1 вычислителей отношения сигналов 16 соединены со входами соответствующих n+1 первых устройств сравнения 17, выходы которых соединены с n+1 входами второй схемы «И» 18, вход первого устройства задержки 19 соединен с выходом порогового устройства 3, первый и второй входы схемы «И» 4 соединены с выходом первого устройства задержки 19 и выходом второй схемы «И» 18 соответственно, выход схемы «И» 4 соединен со входом схемы стробирования 20, выход которой соединен с управляющим входом второго ключа 26, выходы n+1 вычислителей отношения сигналов 16 соединены также со входами соответствующих n+1 вторых устройств задержки 21, последовательно соединенных с соответствующими n+1 вторыми устройствами сравнения 22, выходы которых соединены с n+1 входами схемы «ИЛИ» 23, выход схемы «ИЛИ» 23 соединен с управляющим входом первого ключа 14, выход фильтра 1 и выходы n фильтров 15 соединены также со входами n+1 соответствующих третьих пороговых устройств 24, выход второго порогового устройства 3 и выходы третьих пороговых устройств 24 соединены с n+2 входами второй схемы «ИЛИ» 25, выход которой соединен со входом первого ключа 14, выход которого соединен со входом второго ключа 26, выход второго ключа 26 является выходом сигнала об обнаружении групповой цели.
Заявляемое устройство по п.5 может быть выполнено с использованием следующих функциональных элементов.
Фильтр 1, фильтр 2, фильтр 15 - цифровые фильтры (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М., «Радио связь», 1986, с.38-45).
Пороговое устройство 3, схема «И» 4, устройство сравнения 17, схема «И» 18, устройство задержки 19, схема стробирования 20, устройство задержки 21, схема «ИЛИ» 23, ключ 14, пороговое устройство 24, схема «ИЛИ» 25, ключ 26 - цифровые элементы, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина, М., Радио и связь, 1984).
Вычислитель отношения сигналов 16 - вычислитель, осуществляющий вычисление отношения сигналов.
Устройство сравнения 17 - вычислитель, осуществляющий проверку условия (1).
Устройство сравнения 22 - вычислитель, осуществляющий проверку условия (2), в котором уровень порога Δу один выбирается в зависимости от номера бокового лепестка L, т.е. условие (2), проверяемое в устройстве сравнения 22, имеет вид

Это устройство работает аналогично устройству по п.3 со следующими особенностями.
Для того чтобы на выходе второй схемы «И» 18 появился сигнал, нужно чтобы сигнал появился на выходах всех первых устройств сравнения 17. Это возможно только тогда, когда на выходах всех вычислителей отношения сигналов 16 сигналы близки к расчетным для главного лепестка (т.е. условие (1) выполняется для всех отношений сигналов).
Отметим, что устранение указанной ранее зоны неоднозначности в точке Bt≈1.3, имеющей место в устройстве по п.3 (фиг.3), обеспечивается в устройстве по п.5 уже при n=3. Действительно, если в дополнение к двум фильтрам (с равномерной весовой обработкой и весовой обработкой по Хэммингу) ввести фильтр с весовой обработкой по Тейлору, то уровень сигнала после этой обработки не будет равен уровню, соответствующему в точке Bt≈1.3 (см. фиг.2). Для большего отличия уровня сигнала в этой точке можно использовать весовую функцию «косинус квадрат с пьедесталом» «отношение сужения» 3:1 (Справочник по радиолокации. /Под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.434, табл.9, строка 45).
Таким образом обеспечивается достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2339969C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2319978C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА И БЛОКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156476C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2661889C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛА И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2167494C2 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |
| Устройство адаптивной защиты радиолокационной станции от активных шумовых помех с произвольным пространственным спектром и различной поляризационной структурой | 2018 |
|
RU2739394C2 |
| СПОСОБ И ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2015 |
|
RU2605628C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413237C1 |
| АДАПТИВНАЯ ЭНЕРГЕТИКО-КОРРЕЛЯЦИОННАЯ СИСТЕМА ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1996 |
|
RU2116000C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях при обнаружении цели. Достигаемым техническим результатом является обнаружение групповой цели в случае, когда отраженный сигнал от одной цели маскируется боковыми лепестками сжатого сигнала от другой цели. Осуществляют весовую обработку отраженного от цели принимаемого электромагнитного колебания с использованием n≥2 весовых функций. При этом измеряют отношения уровней сигналов после весовой обработки, сравнивают сигнал после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, с порогом обнаружения, сравнивают отношение уровней сигналов с их расчетными значениями и принимают решение об обнаружении одиночной цели. Дополнительно принимают решение об обнаружении групповой цели, если отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других видов весовой обработки, измеренные в области бокового лепестка сигнала обнаруженной цели, отличаются от расчетных значений этих отношений более чем на установленную для одиночной цели величину и уровень сигнала в области этого лепестка превышает порог обнаружения. 3 н. и 3 з.п. ф-лы, 4 ил.
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2112992C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2106653C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2027199C1 |
| US 4806936 А, 21.02.1989 | |||
| US 5402131 А, 28.03.1995 | |||
| US 4536764 А, 20.08.1985. | |||

