Изобретение относится к измерительным системам оптико-физических параметров протяженных объектов и может быть использовано для дистанционного контроля параметров покрытий, полимерных пленок, а также определения загрязнений акваторий, для геологических и астрофизических исследований, в метеорологии.
Известно телевизионное устройство для измерения оптико-физических параметров объектов, позволяющее проводить одновременное исследование поляризованной и неполяризованной компонент двумерного оптического сигнала изображения.
Наиболее близким техническим решением к предлагаемому, принятому за прототип, является телевизионное устройство для измерения оптико-физических параметров объектов (Б.К. Джаппаркулов, Е.Н. Пестров, В.А. Селиванов, Б.П. Хромой. Телевизионное устройство для измерения оптико-физических параметров объектов. АС SU, 1734237 A1, кл. H 04 N 17/00, 15.05.92, Бюл. 18), содержащее первый и второй линейный поляризаторы, ослабитель, круговой правоциркулярный поляризатор, четыре идентичных светофильтра, первую, вторую, третью и четвертую телевизионные камеры, первый, второй, третий и четвертый вычитатели, первый, второй, третий и четвертый аналого-цифровые преобразователи, блок вычисления степени поляризации, блок вычисления азимута поляризации, блок вычисления эллиптичности, первый буферный усилитель, первый, второй и третий цифро-аналоговые преобразователи, первый и второй буферный усилители, первый, второй и третий делители, коммутатор, цветокорректирующую матрицу, цветной видеоконтрольный блок, тактовый генератор, синхрогенератор и блок задержки синхросмеси, выходы которого соединены с синхровходами цветного видеоконтрольного устройства R, G, B-входы которого соединены через последовательно включенную цветокорректирующую матрицу с выходами первого, второго и третьего цифро-аналогового преобразователя соответственно, входы которых соединены с соответствующими выходами коммутатора, причем первые входы коммутатора соединены с выходами блока вычисления степени поляризации через последовательно включенный первый буферный усилитель, третьи входы коммутатора соединены с выходами блока вычисления азимута поляризации, при этом выход тактового генератора соединен с тактовыми входами первого, второго и третьего аналого-цифровых преобразователей, первого буферного усилителя, блока вычисления степени поляризации, блока вычисления азимута поляризации, блока задержки синхросмеси и синхрогенератора, синхровыходы которого соединены с синхровходами блока задержки синхросмеси и синхровходами первой, второй, третьей и четвертой телевизионных камер, входы гашения соединены с выходами гашения синхрогенератора, первый и второй линейные поляризаторы оптически связаны через соответственно второй и третий светофильтры с оптическими входами второй и третьей телевизионных камер, круговой правоциркулярный поляризатор оптически связан через четвертый светофильтр с оптическим входом четвертой телевизионной камеры, а оптический вход первой телевизионной камеры оптически связан через первый светофильтр с ослабителем, выход первой, второй, третьей и четвертой телевизионной камеры соединен с входами первого, второго, третьего и четвертого аналого-цифрового преобразователей соответственно, выходы первого из которых соединены с вторыми входами первого, второго и третьего вычитателей непосредственно и через последовательно включенный второй буферный усилитель со вторыми входами первого, второго и третьего делителей и первым входом блока вычисления степени поляризации, а выходы второго, третьего и четвертого аналого-цифровых преобразователей соединены каждый через последовательно включенный соответствующий вычитатель с первыми входами первого, второго и третьего делителей и соответствующими входами блока вычисления степени поляризации, выходы первого, второго и третьего делителей соединены соответствующими нечетными входами коммутатора, причем выходы первого делителя соединены также с первыми входами блока вычисления азимута поляризации, вторые входы которого соединены с выходами второго делителя, выходы третьего делителя соединены также с первыми входами блока вычисления эллиптичности, вторые входы которого соединены с выходами блока вычисления степени поляризации, а выходы - с шестым входом коммутатора, причем синхровходы и входы гашения четвертой телевизионной камеры соединены с соответствующими выходами синхрогенератора, а выход тактового генератора соединен с тактовыми входами четвертого аналого-цифрового преобразователя, трех делителей, второго буферного усилителя и блока вычисления эллиптичности.
Работа известного устройства основана на реализации метода определения четырех параметров вектора Стокса и их относительных функционалов: степени поляризации p, азимута поляризации и эллиптичности частично поляризованного светового потока с помощью четырех измерительных каналов.
Для реализации данного метода плоскости пропускания поляризатора устанавливаются относительно, например, горизонта под углами 0, 45o и соответственно для первого и второго линейных поляризаторов. Обозначим выходные сигналы первой, второй, третьей и четвертой телевизионной камеры, оцифрованные в блоках аналого-цифрового преобразования соответствующих измерительных каналов любой из оптических ветвей, как I(0o), I(45o), 0.5I, I(⊘) соответственно.
Оцифрованные видеосигналы поступают на блоки вычисления, в которых происходит следующая обработка. Сначала вычисляются параметры вектора Стокса по алгоритму, соответствующему данной оптической схеме измерений. Алгоритм вычисления параметров вектора Стокса записывается в виде матрицы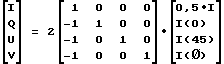
где
первый параметр I характеризует интенсивность оптического сигнала, второй параметр Q характеризует преимущественную горизонтальную линейную поляризацию, третий параметр U характеризует преимущественную линейную поляризацию под углом 45o и четвертый параметр V индицирует круговую поляризацию. Затем вычисляются функционалы: степень линейной поляризации p, азимут плоскости линейной поляризации ϕ и эллиптичность q (степень круговой поляризации). Именно эти величины и представляют интерес для визуального анализа, поскольку они являются относительными величинами, т.е. независимыми от входной экспозиции. Кроме того, с их помощью можно создать количественное описание поляриметрических свойств объектов. Алгоритм вычисления этих функционалов задается следующими выражениями .
.
Однако данное техническое решение не позволяет измерять те поляризационные характеристики объектов, которые можно было бы использовать в целях классификации и распознавания, а также для решения задачи определения оптико-физических свойств наблюдаемых объектов (комплексного коэффициента преломления и структуры среды) по результатам поляриметрических измерений.
Известно, что световой поток полностью описывается четырьмя параметрами вектора Стокса или их функционалами (яркость L, степень поляризации p, степень эллиптичности q и азимут ϕ ), которые несут всю доступную для измерения информацию об оптических свойствах объекта. Однако физические явления, обуславливающие появление поляризации при взаимодействии неполяризованного света с веществом (отражение, рассеяние, поглощение, преломление), непосредственно связаны с геометрией системы: источник освещения - объект - наблюдатель. Поэтому и поляризационные характеристики отраженного светового потока, которые могут быть замерены, также являются функциями геометрии наблюдения.
Поэтому результаты измерений поляризационных функционалов одних и тех же объектов, полученные в одних условиях наблюдения (например, с самолета) в утренние часы, не будут соответствовать результатам измерений над данной местностью в дневные или вечерние часы (при другой высоте солнца), или же в то же самое время (утреннее), но при другом направлении полета (ином азимуте Солнца). Более того, при площадных телевизионных измерениях одни и те же объекты будут иметь в центре и на краю кадра различную, например, степень поляризации телевизионного изображения из-за различия углов визирования.
Техническая задача, на решение которой направлено изобретение, заключается в следующем. Угловая функция указанных выше параметров (зависимость от так называемого фазового угла 0< α < 180 в плоскости: источник освещения - объект - наблюдатель) является уже неизменной характеристикой объекта наблюдения и может служить сигнатурой объекта для дальнейшей его классификации и распознавания на телевизионном изображении. Такая характеристика носит название поляризационно-фазовая кривая (ПФК).
В то же время ПФК обладают значительной информационной избыточностью, обусловленной тем фактом, что преобладающим явлением при взаимодействии света с веществом являются эффект отражения, описываемые формулой Френеля. Поэтому поведение ПФК, например, для степени поляризации p(α) для подавляющего большинства объектов будет очень похожим. Для иллюстрации этого факта на фиг. 1 приведены ПФК для некоторых объектов. Из фиг. 1 видно, что в ПФК присутствует общая для всех низкочастотная компонента, задаваемая угловой зависимостью формулы Френеля, и высокочастотная компонента, связанная именно с физико-химическими и структурными свойствами объекта.
Так, например, появление второго минимума в области малых углов свидетельствует о многократном рассеянии в веществе (так называемое явление инверсии поляризации). Масштаб ПФК, т.е. абсолютные значения максимума и минимума (или фазовые углы, соответствующие экстремальным значениям ПФК), также непосредственно связаны с физическими свойствами вещества и могут служить его идентификационными признаками. Такие параметры ПФК мы будет называть поляризационными признаками.
Можно показать, что именно через поляризационные признаки ПФК, являющиеся инвариантами условий наблюдения, однозначно определяется комплексный показатель преломления вещества, дисперсность (гранулярность) взвешенных частиц, шероховатость поверхности, наличие и толщина поверхностных пленок и т. п.
Таким образом, переход от ПФК к поляризационным признакам позволяет не только сократить избыточность измерительной информации при сохранении ее семантической части, но и обеспечить возможность телевизионного наблюдения пространственного распределения поляризационных характеристик за счет сокращения размерности сигналов.
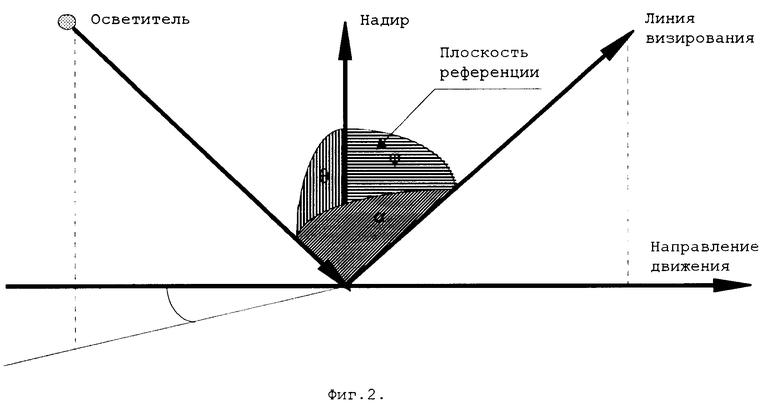
Физическая реализация телевизионного устройства, позволяющая в конечном счете наблюдать двумерное распределение поляризационных признаков, предполагает, помимо обычного для телевизионных систем двумерного сканирования, сканирование по углу визирования в диапазоне 0 < θ < 180. Однако, даже сканирование во всем указанном диапазоне, при условии произвольного положения осветителя (например, Солнца) относительно плоскости сканирования, не обеспечивает перекрытия всего диапазона изменений фазового угла α , что показано на фиг. 2 (геометрия схемы наблюдения). Кроме того, при больших углах сканирования (относительно надира) геометрические искажения изображения становятся недопустимо большими и не могут быть скорректированы. Однако, как видно из фиг. 1, наибольшей изменчивостью, т.е. наиболее информативной частью ПФК, является область малых фазовых углов α . Этот диапазон, например, для натурных телевизионных наблюдений с борта самолета или со спутника в наших широтах для характерных высот Солнца 60 может быть перекрыт диапазоном углового сканирования телевизионной системы 0 < θ < 45, что приемлемо с точки зрения допустимых геометрических искажений на краю сканирования. Очевидно, что для лабораторных изменений (для промышленных установок) удовлетворить этим требованиям проще за счет выбора направления источника освещения и ориентации измерительной телевизионной системы.
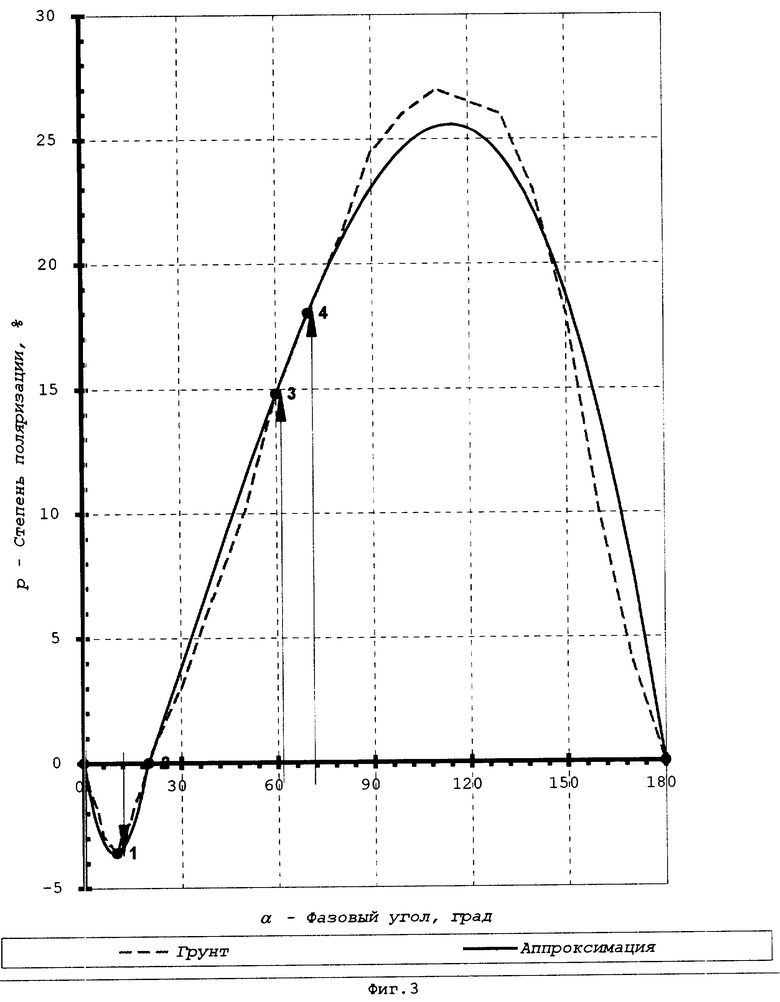
Более того, плавное поведение ПФК, характеризующее общую для всех ПФК низкочастотную Френелевскую компоненту, позволяет ограничить количество угловых отсчетов, необходимых для точного восстановления ПФК в области малых углов. Можно показать, что приемлемая точность восстановления ПФК для подавляющего большинства объектов может быть достигнута при наличии лишь 4-х угловых отсчетов, как это показано на фиг. 3.
Следовательно, исследование двумерного распределения поляризационных признаков ПФК объектов позволяет идентифицировать и классифицировать объекты по их поляризационным свойствам независимо от условий наблюдения, т.е. определять их комплексный коэффициент преломления, различать объекты по дисперсионным свойствам (исследовать облака и аэрозоли в атмосфере, загрязнения на поверхности земли и суши), контролировать качество ткани, стекла, полимерных пленок и покрытий при производстве и т.д.
Это достигается за счет того, что в устройство для измерения оптико-физических параметров объектов, содержащее первый и второй линейные поляризаторы, ослабитель, циркулярный поляризатор, каждый из которых последовательно связан с соответствующим светофильтром, телевизионной камерой и аналого-цифровым преобразователем, образуя первый, второй, третий и четвертый аналогичные измерительные поляризационные каналы, объединенные с блоком вычисления интенсивности, блоком вычисления степени поляризации, блоком вычисления азимута поляризации и блоком вычисления эллиптичности в оптическую ветвь, коммутатор, три цифро-аналоговые преобразователя, цветное видеоконтрольное устройство, связанное R, G, B входами через соответствующие цифро-аналоговые преобразователи с соответствующими выходами коммутатора, отличающиеся тем, что оно снабжено по крайней мере одной дополнительной оптической ветвью, блоками коррекции геометрических искажений, блоками коррекции пространственно-временных согласований, блоками интерполяции по фазовому углу, блоками выделения поляризационных признаков, датчиком высоты и азимута осветителя, датчиком местоположения и скорости объекта, блоками вычисления интенсивности, причем в каждой оптической ветви выход каждого измерительного канала соединен с соответствующими входами блоков вычисления интенсивности, блока вычисления степени поляризации, блока вычисления азимута поляризации и блока вычисления эллиптичности, выходы которых через соответствующие блоки коррекции геометрических параметров связаны с входами соответствующих блоков коррекции пространственно-временных рассовмещений, связанных выходами с соответствующими входами блоков интерполяции по углу визирования, каждый из которых через соответствующие последовательно включенные блоки коррекции по фазовому углу и блок выделения поляризационных признаков соединены с соответствующим входом коммутатора, при этом выход датчика высоты и азимута осветителя соединен с управляющими входами блоков коррекции по фазовому углу, а выход датчика места положения и скорости объекта - с управляющими входами блоков коррекции пространственно-временных рассовмещений, причем оптические ветви ориентированы в одной плоскости с угловым расстоянием относительно друг друга, равным 180/N, где N - количество оптических ветвей.
Для исключения неоднозначности измерений поляризационных параметров вводятся дополнительно N идентичных оптических ветвей, ориентированных в одной плоскости с равными угловыми расстояниями, каждая из которых содержит четыре измерительных поляризационных канала.
Интерполяция одноименных видеосигналов по углу со всех оптических ветвей и их геометрическая коррекция с последующим приведением полученных угловых зависимостей к новой системе координат, связанной с осветителем, позволяет определить поляризационно-фазовые зависимости поляризационных параметров для каждого элемента изображения.
Последующая обработка с целью выделения поляризационных признаков из поляризационно-фазовых кривых позволяет сократить избыточность и размерность измерительной видеоинформации и осуществить наблюдение пространственного распределения этих признаков, инвариантных к условиям наблюдения, на экране ВКУ.
Коммутация видеосигналов поляризационных признаков позволяет осуществлять поиск наиболее информативных признаков и наблюдать их пространственную корреляцию в псевдоцветах.
Существенными отличиями предлагаемого устройства от известных является введение новых блоков и связей между ними, а также новых связей между известными блоками, которые позволяют реализовывать возможность измерения совокупности из четырех поляризационно-фазовых кривых каждого разрешаемого телевизионной системой пространственного элемента наблюдаемого объекта. С этой точки зрения наиболее важными дополнительно введенными блоками являются N разнесенных по углу оптических ветвей, блоки коррекции геометрических искажений, блоки коррекции пространственно-временных рассовмещений, датчик местоположения и скорости.
Дополнительным отличием, позволяющим сократить размерность измерительной информации и визуализировать пространственное распределение поляризационных признаков, инвариантных к условиям наблюдения и непосредственно связанных с оптико-физическими характеристиками объектов, являются дополнительно введенные блоки интерполяции по углу визирования, блоки коррекции по фазовому углу, датчик высоты и азимута осветителя и блоки выделения поляризационных признаков.
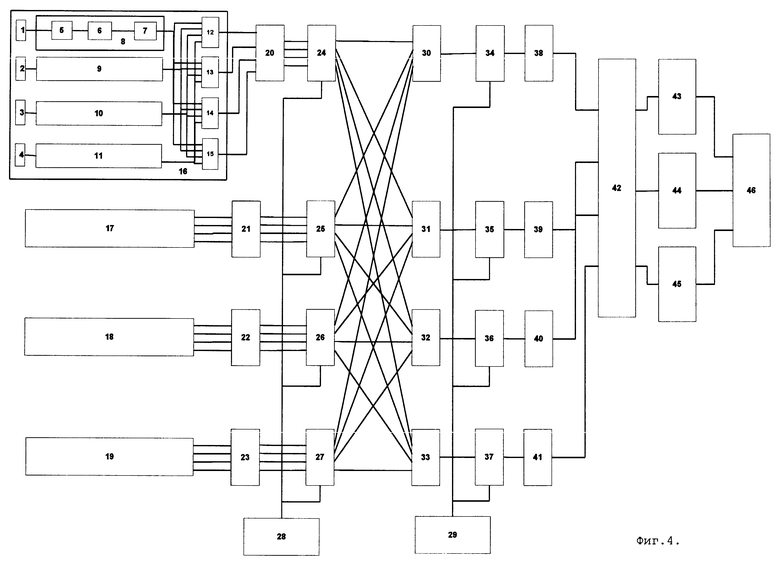
На фиг. 4 представлена структурная схема устройства для измерения поляризационных параметров объектов.
В состав структурной схемы предлагаемого устройства входят линейные поляризаторы 1, 2; ослабитель 3; циркулярный поляризатор 4, светофильтр 5; телевизионная камера 6; аналого-цифровой преобразователь 7; первый - четвертый измерительные поляризационные каналы 8 - 11; блок 12 вычисления интенсивности; блок 13 вычисления степени поляризации; блок 14 вычисления азимута поляризации; блок 15 вычисления эллиптичности; первая - N-я оптическая ветвь 16 - 19; первый - N-й блоки 20 - 23 коррекции геометрических искажений; первый - N-й блоки 24 - 27 коррекции пространственно-временных рассовмещений; датчик 28 местоположения и скорости; датчик 29 высоты и азимута осветителя; первый - четвертый блоки 30 - 33 интерполяции по углу визирования; первый - четвертый блоки 34 - 37 коррекции по фазовому углу; первый - четвертый блоки 38 - 41 выделения поляризационных признаков; коммутатор 42; первый - третий цифро-аналоговые преобразователи 43 - 45; цветное видеоконтрольное устройство 46.
Телевизионное устройство содержит N идентичных оптических ветвей 16 - 19, расположенных в одной плоскости с угловым расстоянием между соседними по номеру ветвями, равным 180/N.
Каждая оптическая ветвь содержит четыре измерительных поляризационных канала 8, 9, 10, 11, содержащих последовательно включенные светофильтр 5, телевизионную камеру 6 и аналого-цифровой преобразователь 7. Первый и второй измерительные поляризационные каналы 8 и 9 оптически связаны с первым и вторым линейными поляризаторами по входу соответственно. Третий измерительный поляризационный канал 10 оптически связан с ослабителем 3 по входу. Четвертый измерительный поляризационный канал 11 оптически связан с круговым поляризатором 4. Выход каждого измерительного канала 8 - 11 соединены с соответствующим входом блока вычисления интенсивности 12, степени поляризации 13, азимута поляризации 14 и эллиптичности 15.
Выходы первой второй, третьей, N-оптических ветвей 16, 17, 18, 19 через соответствующие последовательно включенные первый, второй, третий и N-й блоки коррекции геометрических искажений соединены с соответственными входами первого, второго, третьего и N-го блоков 24 - 27 коррекции пространственно-временных рассовмещений, управляющие входы которых объединены и соединены выходом датчика местоположения и скорости. Каждый выход блоков 24 - 27 коррекции пространственно-временных рассовмещений соединен с соответственным входом блока (30 - 33) интерполяции по углу визирования. Выходы блоков коррекции по углу визирования через последовательно включенные соответствующие блоки 34, 35, 36, 37 коррекции по фазовому углу и первый, второй, третий и четвертый блоки 38 - 41 вычисления поляризационных признаков соединены с входами коммутатора 42.
Три выхода коммутатора 42 через последовательно включенные первый, второй, третий аналого-цифровые преобразователи 43, 44, 45 соединены с R, G, B входами цветного видеоконтрольного устройства. Выход датчика 29 высоты и азимута осветителя соединен с объединенными входами блоков 34 - 37 коррекции фазового угла.
работает устройство следующим образом.
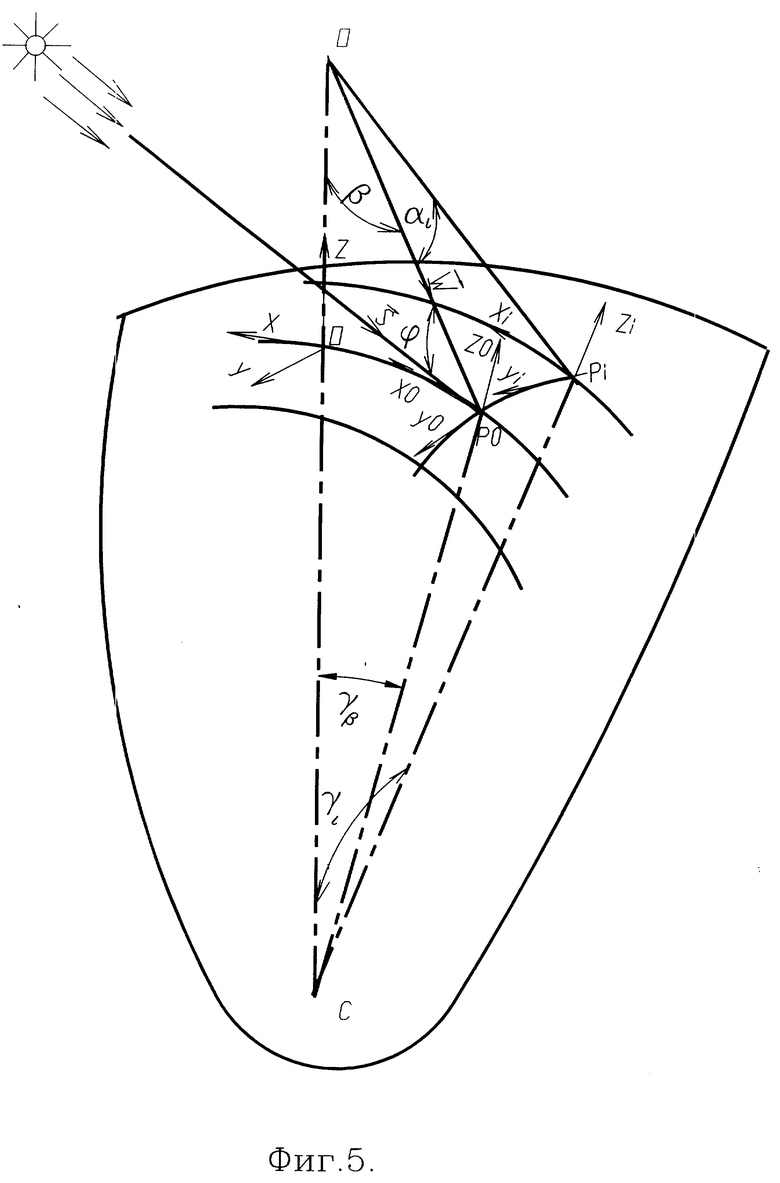
Для иллюстрации работы рассмотрим наиболее сложный случай наблюдения естественных поверхностей с движущегося носителя (например, с самолета) при произвольной высоте и азимуте Солнца (естественный осветитель). Этому случаю соответствует геометрическая схема наблюдения, представленная на фиг. 5. Плоскость, образованную носителем телевизионной с системы и направлением движения, в которой располагаются оптические ветви, определяют как плоскость референции. Тогда угол, который составляет направление визирования любой оптической ветви 16 - 19 с направлением в надир, обозначают через ϕ , угол Солнца через θ , азимут Солнца через ψ , фазовый угол в плоскости Солнце - объект наблюдения - носитель через α и угол захвата оптической системы, определяющий полуширину проекции на Земле строки изображения в направлении, перпендикулярном направлению движения.
Ограничимся рассмотрением устройства с четырьмя оптическими ветвями с углами 0, 15, 30, 45o. В качестве телевизионных камер 7 измерительных поляризационных каналов 8 - 11 будем рассматривать однострочные ПЗС камеры с числом элементов в строке, равным, например, 1024. Спектральный диапазон всех измерительных поляризационных каналов всех оптических ветвей определяется спектральными характеристиками идентичных светофильтров 5 и выбирается в видимом диапазоне (например, ЖЗС-23 (Каталог оптического стекла)). Объективы телевизионных камер измерительных поляризационных каналов выбираются с учетом необходимого пространственного разрешения на поверхности Земли при заданной высоте полета и скорости движения носителя. Для нашего случая выберем объектив типа ОКС-17 с фокусным расстоянием 30 мм и углом 20o.
Для простоты будем полагать, что объективы телевизионных камер всех измерительных каналов в каждой оптической ветви съюстированы таким образом, что их оптические оси совпадают с оптической осью оптической ветви. Этим достигается пространственное совмещение проекций одноименных светочувствительных элементов ПЗС камер четырех каналов поляризационных измерительных телевизионных каналов 8, 9, 10, 11 в каждой оптической ветви.
Устанавливая в каждой оптической ветви на входе первого поляризационного измерительного канала 8 линейный поляризатор 1, ориентированный своей плоскостью пропускания в плоскости референции (по направлению движения), на входе второго поляризационного измерительного канала 9 второй линейный поляризатор 2 с плоскостью пропускания под 45o к плоскости референции, на входе третьего поляризационного измерительного канала 10 ослабитель 3 с коэффициентом пропускания 0,5 и на входе третьего поляризационного измерительного канала 11 циркулярный поляризатор 4, мы реализуем классическую схему поляризационных измерений для определения параметров вектора Стокса.
Оцифрованные в аналого-цифровых преобразователях 7 синхронные видеосигналы с выходов поляризационных измерительных каналов поступают на блоки вычисления поляризационных функционалов, в которых осуществляется линейная обработка видеосигналов для получения параметров вектора Стокса по формуле 1 и нелинейная обработка для получения значений степени поляризации (в блоке 12 вычисления), азимута поляризации (в блоке 14 вычисления), эллиптичности (в блоке 15 вычисления) в соответствии с формулой 2 и интенсивности (без нелинейной обработки) в блоке 12 вычисления.
Таким образом, в выбранный момент времени на четырех выходах оптического канала присутствуют цифровые отсчеты всех поляризационных функционалов. Однако, геометрическое место, соответствующее конкретному набору поляризационных функционалов, связанных с i-м элементом разрешения (отсчитываемом от центра строки ТВ изображения) поляризационного измерительного канала первой оптической ветви 16, не совпадает с координатами проекции i-го элемента разрешения поляризационных измерительных каналов второй оптической ветви 17 за счет изменения угла визирования оптических ветвей. При этом площадь проекции этого i-го элемента в любой оптической ветви оказывается отличной от надирной оптической ветви. При этом площади проекции любого i+N+1 элемента оказывается больше, чем i+N за счет увеличения угла визирования по длине строк.
Таким образом существуют геометрические искажения проекции светочувствительных элементов в направлении, перпендикулярном плоскости референции в каждой оптической ветви, и геометрические искажения между одноименными элементами разрешения в различных оптических ветвях, что иллюстрируется на фиг. 5.
Для получения угловой зависимости поляризационных функционалов, инвариантной по абсолютным энергетическим параметрам к геометрическому месту в кадре изображения, необходимо осуществить геометрическую коррекцию всех элементов изображения в виде масштабных преобразований. При этом удобно за базовый элемент принять центральный элемент разрешения надирной оптической ветви.
Тогда геометрическая коррекция элементов, симметричных относительно центрального элемента разрешения по строке в каждой оптической ветви, и одноименных (по строке) элементов различных оптических ветвей описан в разделе геометрической коррекции. Очевидно, что наибольшие геометрические искажения соответствуют четвертой оптической оси, имеющей наибольший угол отклонения от надира.
Задачей геометрической коррекции является приведение изображений, формируемых наклонными ветвями, к некоторому исходному виду, в качестве которого удобно использовать изображение, создаваемое ветвью с нулевым наклоном. Как показано на фиг. 5, проекция линейного фотоприемника на подстилающую поверхность представляет собой дугу окружности, причем только для оптической ветви, ось которой совпадает с местной вертикалью, это дуга большого круга (геодезическая линия). Наклон плоскости сканирования приводит к изменению масштаба проекции элемента ПЗС, радиуса кривизны строки и ширины полосы обзора, под которой здесь понимается длина хорды, соединяющей проекции начального и конечного элементов линейки.
Преобразование информационных массивов должно включать в себя следующие операции:
1) "Отбрасывание" элементов строчных массивов, которые соответствуют тем чувствительным элементам ЛФПЗС, которые проектируются во внешнюю, по отношению к заданной полосе обзора область;
2) Линейную интерполяцию между оставшимися элементами строк, чтобы вновь сформированный массив содержал исходное количество элементов;
3) Междустрочную интерполяцию, в результате которой компенсируется кривизна строк, т.е. продольные сдвиги между одноименными элементами преобразованных строчных массивов.
Геометрическая схема, на основании которой могут быть получены алгоритмы коррекции, представлена на фиг.5:
H - высота орбиты КА;
αo - угол сканирования для "надирной" ветви (т.е. для ветви, плоскость 0 сканирования которой проходит через направление в надир);
L0 - ширина полосы обзора, соответствующая углу;
R3 - радиус Земли;
γo - центральный угол, соответствующий L0;
β - угол наклона сканирования одной из наклонной ветвей относительно направления в надир.
 - угол сканирования для наклонной ветви;
- угол сканирования для наклонной ветви; - центральный угол, соответствующий углу наклона;
- центральный угол, соответствующий углу наклона;
Lβ - ширина полосы обзора для наклонной ветви;
l - наклонная дальность;
Rβ - радиус дуги, образуемой проекцией линейного приемника наклонной ветви;
ΔX - продольное смещение элемента строки наклонной ветви по отношению к одноименному элементу надирной ветви.
Угол сканирования надирной ветви выражается через фокусное расстояние объектива f и параметры линейного фотоприемника: шаг линейки a и количество элементов N
Выражение для центрального угла γo имеет следующий вид:
Отсюда ширина полосы обзора для ветви равна
В свою очередь для наклонной ветви
Входящие в выражение (4) величины параметров Rβ и  могут быть определены на основании схемы фиг.5 следующим образом:
могут быть определены на основании схемы фиг.5 следующим образом:
где
Откуда
 .
.
Входящая в (8) наклонная дальность l выражается из треугольников РСР и ОРР: .
.
Условием "правильной" геометрии сканирования является постоянство полосы обзора для ветвей
Lβ= LO (10) .
Решение уравнение (10) при заданном значении угла наклона плоскости сканирования β позволяет определить соответствующий угол сканирования наклонной ветви.
Индексы чувствительных элементов линейного приемника, соответствующие началу и концу наклонной строки, выражаются следующим образом .
.
Продольные сдвиги элементов изображения, формируемого наклонной ветвью, определяются выражением: ,
,
где
hi - стрелка, соответствующая i-му элементу наклонной строки.
Из фиг.5 видно, что
hi= Rβ•(1-cosγ
где
γ
Последний может быть определен, как функция текущего значения индекса чувствительного элемента линейного фотоприемника .
.
Как было сказано выше, продольные сдвиги должны учитываться при совместной обработке сигналов, формируемых оптическими ветвями с различными углами наклона плоскости сканирования.
При этом удобно выражать их в долях от размера проекции на подстилающую поверхность центрального элемента линейки надирной ветви .
.
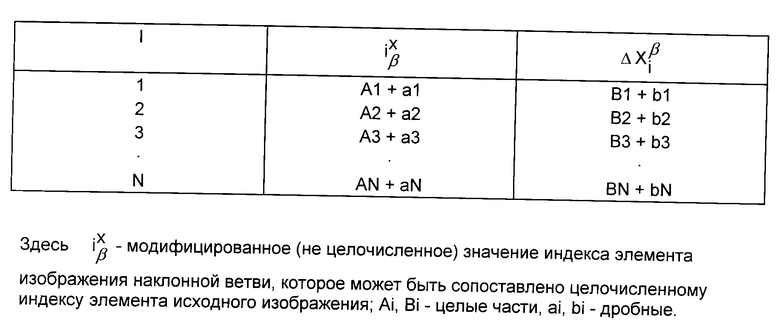
В процессе геометрической коррекции кроме сдвигов в направлении полета должны учитываться изменения масштаба проекции чувствительных элементов линейного приемника, возникающие вследствие наклона плоскости сканирования. Несовпадение изображений, формируемых надирной ветвью и одной из наклонных ветвей, может быть представлена в виде таблицы.
Последовательность вычисления i
1) Согласно выражению (14) для каждого значения i определяется текущее значение угла сканирования α
2) Значение центрального угла находится аналогично (2): .
.
1) Из выражения (1) определяется соответствующая этому центральному углу хорда Li;
2) используя выражения (1) - (3) для численного решения уравнения (14), можно найти текущее значение угла сканирования наклонной ветви α .
.
Интерполированные значения сигнала определяются следующим образом .
.
Здесь
Jβ число строк, соответствующее смещению проекции центрального элемента наклонной строки относительно надирной вдоль направления полета .
.
Разрешение на подстилающей поверхности в зависимости от текущего значения индекса чувствительного элемента ЛФПЗС и угла наклона плоскости сканирования может быть найдено из выражения
r
Блоки 20-23 коррекции геометрических искажений могут быть выполнены на базе сигнального процессора ADSP2181.
Скорректированные таким образом видеосигналы различных оптических ветвей поступают синхронно на блоки коррекции пространственно-временных рассовмещений.
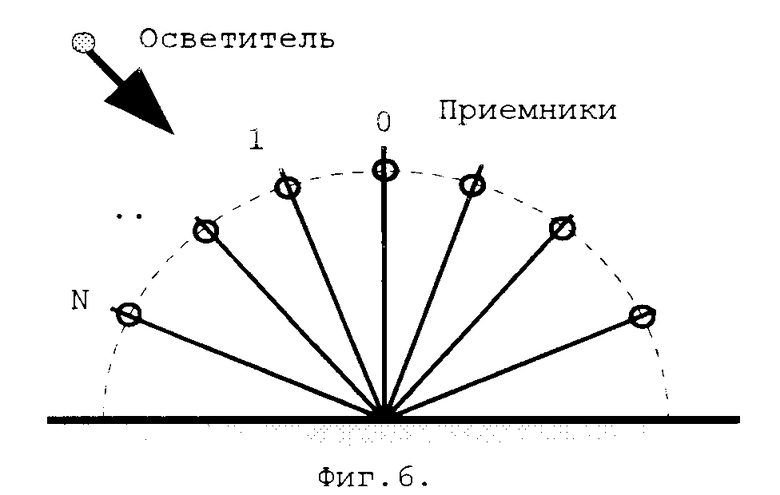
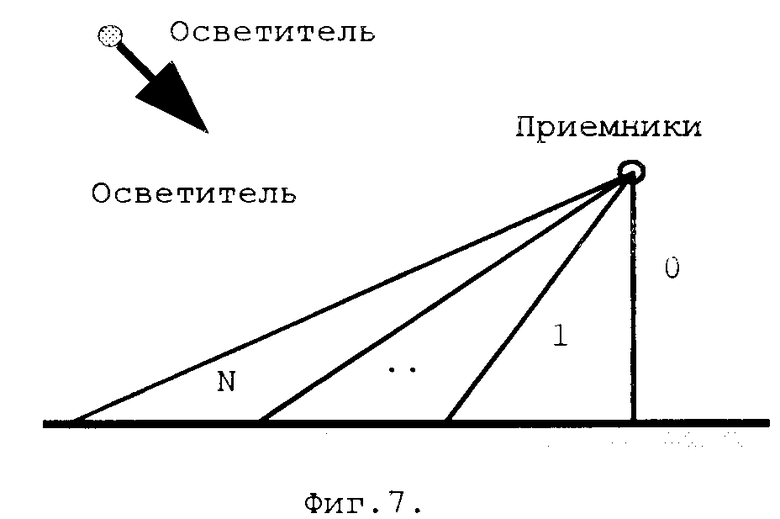
Алгоритм коррекции пространственно-временного рассовмещения определяется конкретной схемой сканирования. В частности:
1. Все оптические ветви нацелены в одну и ту же точку объекта (фиг.6);
2. Все оптические ветви нацелены из одной точки пространства расположения системы (фиг.7). Формирование полного изображения осуществляется посредством взаимного перемещения объекта и системы наблюдения.
Для первого случая не требуется коррекции, однако такая схема требует большой пространственной базы телевизионной системы и ее применение ограничено областью малоразмерных объектов.
Во втором случае блок коррекции пространственно-временного рассовмещения содержит память, обеспечивающую задержку, соответствующую номеру оптической ветви, отсчитываемому от направления в надир в обе стороны (направление перемещения принято за положительное). Тогда время задержки tij между сигналами двух оптических ветвей вычисляется по формуле: ,
,
где
ν - скорость взаимного перемещения.
Блоки 24-27 коррекции пространственно-временного рассовмещения могут быть выполнены на базе сигнального процессора ADSP2181.
Скорректированные таким образом видеосигналы различных оптических ветвей поступают синхронно на блоки интерполяции угловых поляризационных отсчетов.
Интерполяция угловых поляризационных отсчетов решается методом наименьших квадратов: ,
,
где
i - номер поляризационного параметра: яркость L, степень поляризации p, эллиптичность g, азимут поляризации Φ;
P
αj - угол наклона оптической j ветви;
J(j) - измерительные видеосигналы (L, p, g или Φ ) j оптической ветви.
По решению (22) определяются коэффициенты соответствующего полинома P
Блоки 30-33 интерполяции угловых поляризационных отсчетов могут быть выполнены на базе сигнального процессора ADSP2181.
Скорректированные таким образом видеосигналы различных оптических ветвей поступают синхронно на блоки коррекции по фазовому углу.
Искомой функциональной зависимостью является зависимость поляризационного параметра от фазового угла ϕ - угол между направлением визирования отраженного излучения и направлением падения излучения осветителя. Переход от полученной зависимости поляриззационного параметра J по углу визирования α к фазовому углу ϕ по следующему выражению ,
,
где
β - угловое расстояние текущего элемента линейного ПЗС от центрального.
После решения (23) относительно j и подстановки в P
для определения фазового угла на управляющий вход блоков коррекции поступают синхронно сигналы с датчика 29 высоты и азимута осветителя. Датчик высоты и азимута осветителя для рассматриваемого случая может быть выполнен на базе солнечного датчика или блока памяти, совмещенного со стандартным приемником спутниковой навигационной системы GPS/ГЛОНАСС.
Блоки 34-37 коррекции по фазовому углу могут быть выполнены на базе сигнального процессора ADSP2181.
Скорректированные таким образом видеосигналы различных оптических ветвей поступают синхронно на блоки вычисления признаков ПФК.
Из полученных функций Fj(ϕ) , описывающих ПФК, определяются признаки ПФК, являющиеся инвариантами условий наблюдения. В частности, для точки инверсии имеем уравнение
Fj(ϕ) = 0. (24). .
Для определения точек максимума и минимума ПФК необходимо решать уравнение .
.
Блоки 39-41 выделения поляризационных признаков могут быть выполнены на базе сигнального процессора ADSP2181.
Выбор видеосигналов тех или иных признаков и их комбинации для визуализации в псевдоцветах осуществляется в коммутаторе 42, который может быть выполнен на базе цифрового коммутатора серии KP1554.
Выбранные цифровые видеосигналы поступают синхронно на цифро-аналоговые преобразователи 43, 44, 45, которые могут быть выполнены на базе встроенного ЦАП DAC1672.
Синхронные аналоговые видеосигналы поступают на R, G, B входы видеоконтрольного устройства.
В результате мы имеем возможность наблюдать пространственное распределение скалярных признаков ПФК, однозначно определяющее параметры вещества наблюдаемого объекта.
Максимально доступная оптическим методам информация о характеристиках природных образований при их дистанционном зондировании (ДЗ) достигается при изменении поляризации излучения. Особенностью современных моноугловых методов поляризационного ДЗ является их высокая чувствительность как к оптическим параметрам вещества, так и геометрии схемы наблюдения.
Разработана математическая модель, наиболее полно учитывающая механизмы преобразования поляризации излучения в среде с анизотропным рассеянием на основе решения векторного уравнения переноса излучения. Построенная малопараметрическая модель позволяет определить инварианты схемы измерения поляризации: экстремумы и нейтральные точки поляризационно-фазовой характеристики (ПФК). Устойчивость этих инвариантов является основой для классификации и идентификации природных образований. Однозначная интерпретация результатов ДЗ возможна только при определении параметоров ПФК по всем параметрам Стокса.
При предлагаемом многоугловом методе измеряются константы ПФК. Для их измерения разработана оригинальная схема прибора. Принцип ее работы заключается в том, что механическая система обеспечивает периодическую смену поляризационных фильтров перед каждым из четырех ориентированных под разными углами визирования приемников излучения, превращая каждый из четырех угловых каналов последовательно в набор четырех поляризационных. Отличительной особенностью данного прибора является одновременное изменение поляризационных параметров под несколькими фазовыми углами.
Анализ влияния параметров слоя на форму ПФК, проведенный на основе модели, позволил выдвинуть чувствительные к вариациям характеристик моделируемых слоев и независимые от схемы наблюдения параметры этих кривых:
1) угол инверсии поляризации (прохождения ПФК через нуль);
2) значения степени поляризации в точках максимума и минимума;
3) наклон поляризационно-фазовой характеристики в точке инверсии, также характеризующий внутреннюю структуру вещества слоя (размер частиц).
Показано, что ПФК могут быть аппроксимированы по четырем точкам, определяющим угловые каналы поляриметрической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное устройство для измерения оптико-физических параметров объектов | 1989 |
|
SU1734237A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 1998 |
|
RU2156453C1 |
| СПОСОБ ФОРМИРОВАНИЯ, КОНТРОЛЯ И ПРИЕМА ТЕЛЕВИЗИОННОГО СИГНАЛА | 1996 |
|
RU2101874C1 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 2010 |
|
RU2431936C1 |
| СПОСОБ И ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ЭЛЕКТРИЧЕСКОГО ТОКА И МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2497135C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛИМЕРНЫХ ЭЛЕМЕНТОВ | 1996 |
|
RU2097194C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ЭКСПЛУАТИРУЕМЫХ БОЛТОВЫХ СОЕДИНЕНИЙ | 1997 |
|
RU2112968C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ ПРИ ЗАТЯЖКЕ БОЛТОВЫХ СОЕДИНЕНИЙ | 1997 |
|
RU2107907C1 |
| АДАПТИВНЫЙ ОПТИЧЕСКИЙ МОДУЛЬ | 1996 |
|
RU2084941C1 |
| Способ нивелирования и устройство для его осуществления | 1986 |
|
SU1506274A1 |
Устройство предназначено для измерения оптико-физических параметров протяженных объектов и может быть использовано для дистанционного контроля параметров покрытий, полимерных пленок, а также определения загрязнений акваторий, для геологических и астрофизических исследований, в метеорологии. Используется несколько оптических ветвей, каждая из которых включает в себя четыре измерительных канала. Оптическая ветвь содержит два линейных поляризатора, ослабитель, циркулярный поляризатор, каждый из которых связан со светофильтром, телевизионной камерой и АЦП, блоки вычисления степени поляризации, азимута поляризации, эллиптичности и интенсивности. Оптические ветви ориентированы в одной плоскости с угловым расстоянием относительно друг друга, равным 180/N, где N - количество оптических ветвей. Устройство позволяет измерять поляризационные признаки объектов, которые можно использовать для классификации и распознавания, а также для решения задачи определения свойств наблюдаемых объектов по результатам поляризационных измерений. 7 ил. , 1 табл.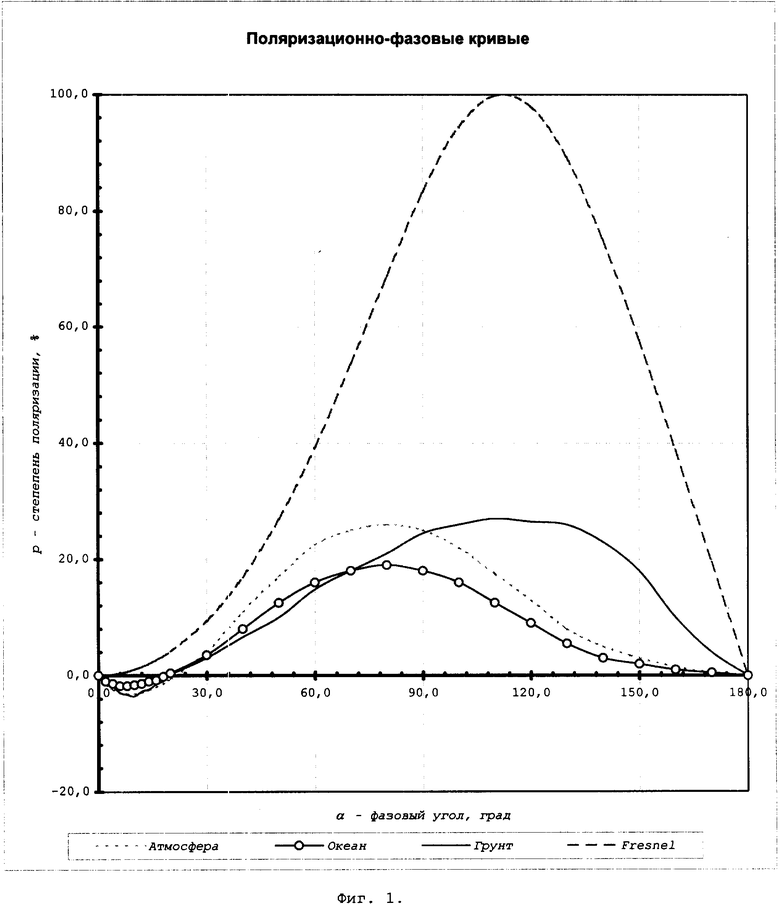
Устройство для измерения оптико-физических параметров объектов, содержащее первый и второй линейные поляризаторы, ослабитель, циркулярный поляризатор, каждый из которых последовательно связан с соответствующим светофильтром, телевизионной камерой и аналого-цифровым преобразователем, образуя соответственно первый, второй, третий и четвертый аналогичный измерительные каналы, объединенные с блоком вычисления степени поляризации, блоком вычисления азимута поляризации и блоком вычисления эллиптичности в оптическую ветвь, коммутатор, три цифроаналоговые преобразователи, цветное видеоконтрольное устройство, связанное R, G, B, входами через соответствующие цифроаналоговые преобразователи с соответствующими выходами коммутатора, отличающееся тем, что оно снабжено по крайней мере одной дополнительной оптической ветвью, блоками коррекции геометрических искажений, блоками коррекции пространственно-временных рассовмещений, блоками коррекции по фазовому углу, блоками интерполяции по углу визирования, блоками выделения поляризационных признаков, датчиком высоты и азимута осветителя, датчиком местоположения и скорости объекта, блоками вычисления интенсивности, причем в каждой оптической ветви выход каждого измерительного канала соединен с соответствующими входами блока вычисления интенсивности, блока вычисления степени поляризации, блока вычисления азимута поляризации и блока вычисления эллиптичности, выходы которых через соответствующие блоки коррекции геометрических параметров связаны с входами соответствующих блоков коррецкции пространственно-временных рассовмещений, связанных выходами с соответствующими входами блоков интерполяции по углу визирования, каждый из которых через соответствующие последовательно включенные блок коррекции по фазовому углу и блок выделения поляризационных признаков соединены с соответствующим входом коммутатора, при этом выход датчика высоты и азимута осветителя соединен с управляющими входами блоков коррекции по фазовому углу, а выход датчика места положения и скорости объекта - с управляющими входами блоков коррекции пространственно-временных рассовмещений, причем оптические ветви ориентированы в одной плоскости с угловым расстоянием относительно друг друга, равным 180/N, где N - количество оптических ветвей.
| SU, авторское свидетельство, 1734237, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
