Изобретение относится к оптическому приборостроению и предназначено для дистанционного зондирования поверхности Земли с космических объектов и авиационных носителей различного класса для измерения оптико-физических параметров объектов.
Для решения задач дистанционного зондирования используются устройства различного класса: фотографические системы, оптико-механические сканирующие устройства, оптико-электронные системы на многоэлементных приемниках и т.д. с широкой гаммой тактико-технических характеристик. Несмотря на то что используемые устройства относятся к различным классам, общим для всех этих устройств является наличие объектива, формирующего изображение исследуемой поверхности, и чувствительного элемента (фотопленки или приемника излучения), расположенного либо в фокальной плоскости объектива, либо в сопряженной с ней плоскости. Эти устройства регистрируют пространственное распределение интенсивности светового поля в различных диапазонах спектра, которое однозначно отождествляется с отражающими или рассеивающими свойствами наблюдаемых объектов. Однако при этом не может быть зарегистрирован ряд оптических явлений, связанных с микрофизическими особенностями объектов.
Известно телевизионное устройство для измерения оптико-физических параметров объектов, содержащее ослабитель, первый и второй линейные поляризаторы, круговой правоциркулярный поляризатор, четыре светофильтра, первую, вторую, третью и четвертую телевизионные камеры, синхронизатор, первый, второй, третий и четвертый аналого-цифровой преобразователи (авторское свидетельство СССР N 173423, кл. H 04 N 17/00, 1992).
Недостатком известного устройства является низкая точность проводимых измерений, так как при измерениях не учтено пространственное распределение отраженного излучения, вследствие чего измеряемые параметры вектора Стокса и их поляризационные функционалы для одних и тех же объектов, полученные в разных условиях съемки, будут различными.
Повышение точности измерений оптико-физических параметров объектов достигается использованием устройств, в которых реализуется многоугловая поляриметрия, позволяющая наряду с определением четырех параметров вектора Стокса исследовать угловое распределение поляризационных признаков.
Многоугловая поляриметрия используется для идентификации при рассеянном освещении объектов с одинаковыми коэффициентами отражения, но с различной пространственной ориентацией, для разделения объектов с матовой и глянцевой поверхностью (контроль состояния растительности), для определения направления на источник освещения в мутной среде (солнечная ориентация в условиях плохой видимости), для определения аэрозольного состава атмосферы (атмосферная оптика и метеорология), для обнаружения загрязнения водоемов (охрана окружающей среды) и т.д.
Известно поляриметрическое устройство для дистанционного измерения оптико-физических параметров объектов, которое содержит N идентичных оптических ветвей, расположенных в одной плоскости с угловым расстоянием между соседними по номеру ветвями, равным 180o/N. Каждая оптическая ветвь содержит первый и второй линейные поляризаторы, ослабитель, циркулярный поляризатор, последовательно связанные с соответствующим светофильтром, телевизионной камерой и аналого-цифровым преобразователем, образуя соответственно первый, второй, третий и четвертый аналогичный измерительные каналы (патент РФ N 2107281, кл. G 01 N 21/21, 1997).
Поляризационное устройство для дистанционного зондирования оптико-физических параметров объектов по патенту N 2107281 по общности решаемых задач и функционально-структурной схеме наиболее близко к изобретению и выбрано в качестве прототипа.
Однако известное устройство, реализуя принцип многоугловой поляриметрии, не обеспечивает необходимой точности измерения оптико-физических параметров объектов и имеет ограниченное число углов, при которых возможно проведение измерений из-за наличия в устройстве N оптических ветвей, развернутых под углом друг к другу, то есть наличия 4xN оптических блоков: первых и вторых линейных поляризаторов, ослабителей, циркулярных поляризаторов, объективов, светофильтров и фотоприемных устройств, преобразующих оптическое излучение в электрический сигнал. При этом одноименные оптические блоки фактически не являются идентичными, так как технологические отклонения в процессе изготовления и ограниченная точность средств паспортизации приводят к неизбежному разбросу параметров. В качестве примера можно указать на различия коэффициентов пропускания поляризационных фильтров и на погрешности ориентации линейных поляризаторов в каждой из ветви. Таким образом, в устройстве имеется N фактически независимых, аналогичных, но не идентичных средств измерения с различными случайными и систематическими составляющими инструментальной погрешности.
Кроме того, устройство имеет большие массогабаритные характеристики и большой объем элементной базы.
Задачей изобретения является создание поляриметрического устройства для дистанционного зондирования оптико-физических параметров объектов, которое позволяет обеспечить распознавание объектов со сверхблизкими оптико-физическими параметрами, имеет высокую точность измерений, позволяющую получать данные о микрофизических структурных особенностях объектов, имеет малые габаритно-весовые характеристики и малый объем элементной базы.
Сущность изобретения заключается в том, что в известном поляриметрическом устройстве для дистанционного зондирования оптико-физических параметров объектов, содержащем оптический блок, включающий первый и второй линейные поляризаторы, ослабитель и циркулярный поляризатор, установленные последовательно и оптически связанные между собой светофильтр, объектив и многоэлементный приемник излучения, а также аналого-цифровой преобразователь (АЦП), первый и второй линейные поляризаторы, ослабитель и циркулярный поляризатор установлены жестко в турель, закрепленную на оси двигателя вращения, обеспечивающего последовательное совмещение оптических осей первого и второго линейных поляризаторов, ослабителя и циркулярного поляризатора с оптической осью светофильтра, а оптический блок установлен в корпусе, снабженном узлом соединения, жестко связанным с механизмом дискретного поворота в диапазоне углов от -60 до +60o, а АЦП включен между приемником излучения и оперативно запоминающим устройством (ОЗУ).
Изобретение поясняется чертежами.
На фиг. 1 показана функционально-структурная схема поляриметрического устройства для дистанционного зондирования оптико-физических параметров объектов.
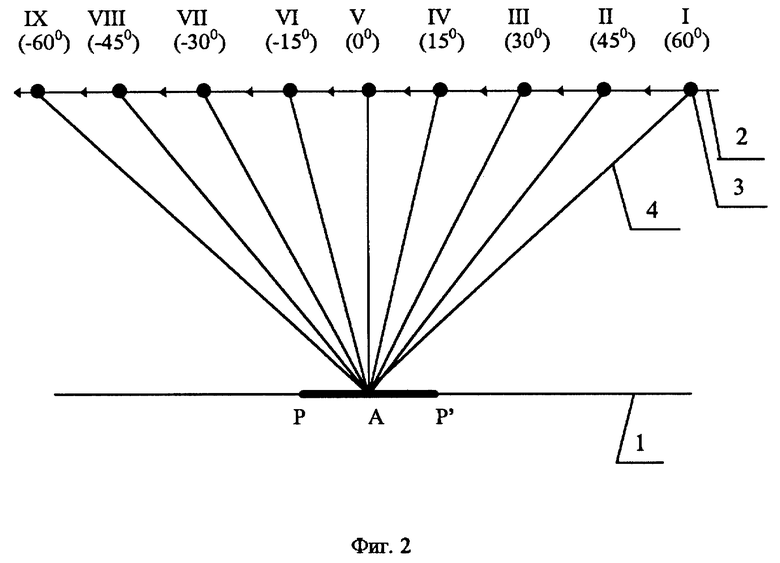
На фиг. 2 представлена иллюстрация процесса угловых измерений поляриметрическим устройством оптико-физических параметров объектов.
Поляриметрическое устройство для дистанционного зондирования оптико-физических параметров объектов (фиг. 1) содержит оптический блок, включающий первый и второй линейные поляризаторы 1, 2, ослабитель 3, циркулярный поляризатор 4, светофильтр 5, объектив 6, многоэлементный приемник 7 излучения, АЦП 8, турель 9, двигатель 10 вращения, корпус 11, механизм 12 дискретного поворота, ОЗУ 13.
В поляриметрическом устройстве для дистанционного зондирования оптико-физических параметров объектов (фиг. 1) линейные поляризаторы 1, 2, ослабитель 3 и циркулярный поляризатор 4 жестко установлены в турель 9, закрепленную на оси двигателя 10 вращения, а светофильтр 5, объектив 6, многоэлементный приемник 7 излучения установлены последовательно и оптически связаны между собой. Турель 9 с двигателем 10 вращения, светофильтр 5, объектив 6, приемник 7 образуют оптический блок, который установлен в корпусе 11. Корпус 11 снабжен узлом соединения жестко связанного с механизмом 12 дискретного поворота. Приемник 7 через АЦП 8 подключен к ОЗУ 13.
Многоэлементный приемник 7 излучения выполнен в виде матрицы или линейки чувствительных элементов.
На фиг. 2 обозначено: 1 - исследуемая поверхность, 2 - траектория и направление движения носителя, 3 - положение носителя в момент проведения измерений (I - IX), 4 - направление визирной оси оптического блока при углах съемки от +60 до -60o, P-P' - участок исследуемой поверхности, на котором проводятся измерения оптико-физических параметров объектов, А - объект исследования.
Поляриметрическое устройство для дистанционного зондирования оптико-физических параметров работает следующим образом.
Перед установкой устройства на движущийся носитель (космический или авиационный) в оптическом блоке плоскость поляризации первого линейного поляризатора 1 совмещается с плоскостью, образованной местной вертикалью и направлением движения носителя, а второго линейного поляризатора 2 - под углом 45o к ней.
Оптическое излучение, отраженное от исследуемой поверхности, поступает на вход первого линейного поляризатора 1 (фиг. 1), который выделяет линейную составляющую поляризованного излучения, совпадающую с плоскостью, образованной местной вертикалью и движением носителя. Отфильтрованное поляризатором 1 излучение поступает на вход светофильтра 5, формирующего спектральный диапазон, в котором проводятся измерения оптико-физических параметров объектов. После светофильра 5 излучение поступает на вход объектива 6, который формирует изображение исследуемой поверхности на чувствительной площадке многоэлементного приемника 7 излучения. Приемник 7 располагается в фокальной плоскости объектива 6, его центральный элемент совмещается с оптической осью объектива.
Излучение, прошедшее оптическую систему (светофильтр 5 и объектив 6), приемником 7 преобразуется в дискретный аналоговый сигнал, который передается на вход АЦП 8, преобразующего его в цифровой. После АЦП 8 дискретный цифровой сигнал направляется в ОЗУ 13, где происходит временное накопление массива данных, которые затем передаются на запоминающее устройство, либо непосредственно в систему обработки и нормализации.
Время t, в течение которого поляризатор 1 перекрывает оптическую систему, а на приемнике 7 происходит накопление сигнала, определяется по формуле
где V - скорость носителя;
R - разрешение, реализуемое устройством на исследуемой поверхности.
Далее излучение от исследуемой поверхности перекрывается на время t вторым линейным поляризатором 2, которой выделяет линейную составляющую поляризованного излучения, отраженного от исследуемой поверхности, лежащую в плоскости, ориентированной под углом 45o к плоскости, образованной местной вертикалью и движением носителя. Затем излучение перекрывается на время t ослабителем 3, который ослабляет интенсивность излучения в 2 раза, и, наконец, излучение перекрывается на время t циркулярным поляризатором 4, выделяющим составляющую излучения, поляризованную по кругу.
Таким образом, при циклической смене поляризаторов 1, 2, 4 и ослабителя 3 на выходе приемника 7 излучения формируется последовательность четырех дискретных сигналов: первый - при установке первого линейного поляризатора 1, второй - второго линейного поляризатора 2, третий - ослабителя 3 и четвертый - циркулярного поляризатора 4, необходимых для определения четырех параметров вектора Стокса и их относительных функционалов: степени линейной поляризации p, азимута плоскости линейной поляризации ϕ и эллиптичность q (степень круговой поляризации).
Многоугловое дистанционное измерение оптико-физических параметров объектов достигается с помощью механизма 12 дискретного поворота, жестко закрепленного на носителе, разворачивающего визирную ось оптического блока в плоскости, образованной местной вертикалью и траекторией движения носителя (фиг. 2). Включение механизма 12 производится через заданные промежутки времени t1, которые равны
где H - высота орбиты носителя;
W - максимальный угол съемки, реализуемый устройством (в приведенном примере 60o);
N - число углов съемки.
Минимальное значение t1 должно быть больше времени перевода визирной оси механизмом 12 из одного положения в другое, а также должно быть больше 4t.
Пусть требуется измерить оптико-физические характеристики объекта А (фиг. 2) на участке P-P' исследуемой поверхности 1 под углами от +60 до -60o через каждые 15o, которые соответствуют положению носителя - I-IX. При подходе носителя к положению I устройство включается и с помощью механизма 12, его визирная ось устанавливается под углом 30o к надирному направлению, что обеспечивает в момент прохождения носителя положения I съемку участка P-P' под углом 60o. За время перемещения носителя из положения I в положение II механизм разворачивает визирную ось оптического блока на угол 45o и при достижение положения II выполняется съемка под углом 45o и т.д.
Таким образом, измерения оптико-физических параметров объектов под разными углами визирования проводятся одним средством измерения, что повышает точность полученных устройством результатов.
Так как число углов, при которых измеряются оптико-физические параметры объектов, в устройстве определяется не количеством оптических ветвей, а числом дискретных положений исполнительного механизма, на котором установлен оптический блок, и временем перемещения визирной оси из одного положения в другое, то число измерений по сравнению с прототипом может быть существенно увеличено, что позволяет также повысить точность измерений.
Рассмотрим варианты исполнения устройства с использованием матричного и линейного фотоприемников.
Пусть в качестве приемника излучения используется матрица kxk элементов. В этом случае проекция приемника на подстилающую поверхность при визировании в надир есть квадрат со стороной
где d - размер чувствительного элемента приемника;
f - фокусное расстояние объектива.
Тогда число углов съемки N при использовании матрицы, учитывая, что для каждого из углов визирования необходимо получение 4-х кадров видеоинформации, равно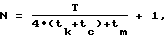
где T - время перехода носителя из положения I в IX;
tk - время формирования одного кадра (tk=t);
tc - время считывания кадра;
tm - время перемещения визирной оси из одного положения в другое (tm= t1).
При использовании линейного фотоприемника в устройстве кадровая развертка осуществляется за счет движения носителя, но так же, как и в случае использования матрицы, формируется кадр. В данном случае число угловых измерений, которые можно реализовать, значительно меньше, так как их увеличение приведет к уменьшению длины кадра. При квадратном кадре в диапазоне углов от -60 до +60o число измерений составит не более 9.
В процессе обработки оцифрованные видеосигналы с ОЗУ 13 подвергаются геометрической коррекции, так как при наклонном зондировании имеют место существенные геометрические искажения между одноименными элементами разрешения при различных углах наблюдения, после чего они поступают на блоки вычисления, в которых сначала вычисляются параметры вектора Стокса по алгоритму, соответствующему данной оптической схеме, при этом алгоритм вычисления параметров вектора Стокса записывается в виде матрицы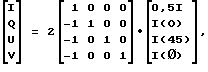
где параметр I характеризует интенсивность оптического сигнала, параметр Q - преимущественную горизонтальную линейную поляризацию, параметр U - преимущественную горизонтальную линейную поляризацию под углом 45o и параметр V - круговую поляризацию. Затем вычисляются функционалы, которые и представляют интерес для визуального анализа, так как являются относительными величинами, то есть не зависят от входной экспозиции. С их помощью можно создать количественное описание оптико-физических параметров объектов. Алгоритм вычисления этих функционалов определяется выражениями:


Предлагаемое поляриметрическое устройство для дистанционного измерения оптико-физических параметров объектов позволяет при малых габаритно-весовых параметрах и малом объеме элементной базы в  раз повысить точность проводимых измерений, где N - число угловых измерений, что позволяет обеспечивать распознавание объектов с сверхблизкими параметрами и получать данные о микрофизических структурных особенностях объектов.
раз повысить точность проводимых измерений, где N - число угловых измерений, что позволяет обеспечивать распознавание объектов с сверхблизкими параметрами и получать данные о микрофизических структурных особенностях объектов.
Актуальность решаемой задачи, а именно возможность контроля состояния окружающей среды, возможность ориентации в условиях плохой видимости, решение задач атмосферной оптики и метеорологии и относительно невысокая стоимость устройства обеспечивают устройству практическое применение.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ В ТЕПЛОВОЙ ОБЛАСТИ СПЕКТРА | 1998 |
|
RU2150725C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2138064C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 1997 |
|
RU2107281C1 |
| Телевизионное устройство для измерения оптико-физических параметров объектов | 1989 |
|
SU1734237A1 |
| СПОСОБ НАНЕСЕНИЯ МЕТАЛЛИЧЕСКИХ ПОКРЫТИЙ НА ИЗДЕЛИЯ ИЗ МАГНИЯ И ЕГО СПЛАВОВ | 1999 |
|
RU2150534C1 |
| СПОСОБ ХИМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ ИЗ ТИТАНА И ЕГО СПЛАВОВ | 1999 |
|
RU2196848C2 |
| СВЧ ФИЛЬТР | 1998 |
|
RU2150769C1 |
| МУЛЬТИПЛЕКСОР | 1998 |
|
RU2150770C1 |
| ИЗОБРАЖАЮЩИЙ МИКРОЭЛЛИПСОМЕТР | 2010 |
|
RU2503922C2 |
| МНОГОЗОНАЛЬНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ЗЕМЛИ С ГЕОСТАЦИОНАРНЫХ ОРБИТ | 2004 |
|
RU2271558C1 |
Использование: дистанционное зондирование поверхности Земли с космических объектов и авиационных носителей различного класса для измерения оптико-физических параметров объектов. Сущность изобретения: устройство содержит первый и второй линейные поляризаторы 1, 2, которые совместно с ослабителем 3 и циркулярным поляризатором 4 жестко установлены в турель 9, закрепленную на оси двигателя 10 вращения, а светофильтр 5, объектив 6, многоэлементный приемник 7 излучения установлены последовательно и оптически связаны между собой. Турель 9 с двигателем 10 вращения, светофильтр 5, объектив 6, приемник 7 образуют оптический блок, который установлен в корпусе 11. Корпус 11 снабжен узлом соединения, жестко связанного с механизмом 12 дискретного поворота. Приемник 7 через АЦП 8 подключен к ОЗУ 13. Поляриметрическое устройство позволяет при малых габаритно-весовых параметрах и малом объеме элементной базы в N раз повысить точность проводимых измерений, где N - число угловых измерений, что позволяет обеспечивать распознавание объектов с сверхблизкими параметрами и получать данные о микрофизических структурных особенностях объектов. 2 ил.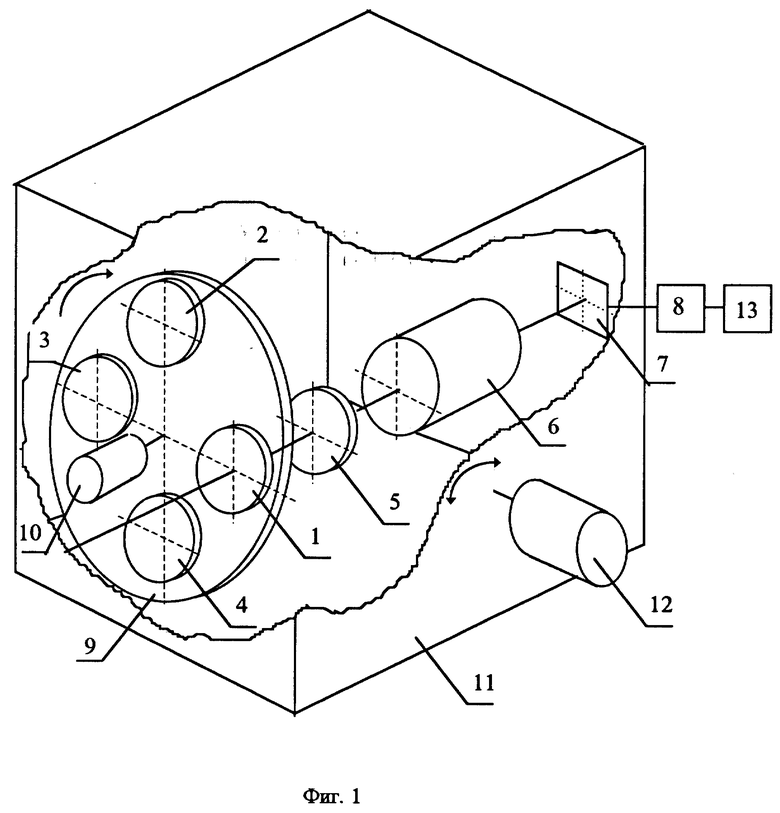
Устройство для дистанционного измерения оптико-физических параметров объектов, содержащее оптический блок, включающий первый и второй линейные поляризаторы, ослабитель и циркулярный поляризатор, установленные последовательно и оптически связанные между собой, светофильтр, объектив и многоэлементный приемник излучения, а также аналого-цифровой преобразователь, отличающееся тем, что первый и второй линейные поляризаторы, ослабитель и циркулярный поляризатор установлены жестко в турель, закрепленную на оси двигателя вращения, обеспечивающего последовательное совмещение оптических осей первого и второго линейных поляризаторов, ослабителя и циркулярного поляризатора с оптической осью светофильтра, оптический блок установлен в корпусе, снабженном узлом соединения, жестко связанным с механизмом дискретного поворота в диапазоне углов от -60 до +60o, аналого-цифровой преобразователь включен между приемником излучения и оперативно запоминающим устройством.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 1997 |
|
RU2107281C1 |
| US 4647207 A, 03.03.1987 | |||
| СТОКС-ПОЛЯРИМЕТР С АКУСТООПТИЧЕСКИМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1984 |
|
SU1274443A1 |
| Телевизионное устройство для измерения оптико-физических параметров объектов | 1989 |
|
SU1734237A1 |

