Способ тепловизионного распознавания формы объектов относится к области тепловизионной техники и может быть использован для дистанционного распознавания и измерения формы объектов и визуализации профиля их сплошной поверхности.
Известен способ бесконтактного измерения трехмерных объектов, который заключается в проецировании плоского луча света на измеряемую поверхность яркой контрастной линии, регистрации ее с помощью цифрового фоторегистрирующего устройства, передаче изображения этой линии на вычислительное устройство, определении вычислительным устройством рельефа измеряемой поверхности в плоскости луча по величине искривления линии. При этом плоский луч неподвижен относительно фоторегистрирующего устройства, а сканирование его по всем сечениям измеряемой поверхности осуществляют ручным перемещением фоторегистрирующего устройства (патент РФ №2365876, кл. G01B 11/24, 2007 г., 27.08.2009 г.).
Недостатком данного способа является необходимость наличия опорных линий, которые должны быть неподвижны относительно измеряемого объекта. Помимо этого на точность результатов измерения влияет угол проецирования полосы света и угол регистрации. Главным недостатком этого способа является использование источника излучения.
Также известен способ бесконтактного контроля линейных размеров трехмерных объектов (патент РФ №2334195, кл. G01B 11/24, 29.05.2006 г.). Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с увеличением пространственной модуляцией интенсивности пучка оптического излучения, а также последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки. Для каждой точки контролируемого объекта определяют зависимость интенсивности зарегистрированного излучения от номера изображения. Используют полученные калибровкой калибровочной поверхности зависимости интенсивности зарегистрированного излучения от номера изображения для калибровочной поверхности, определенной как базовая. Для определения высоты рельефа поверхности контролируемого объекта определяют расстояние от базовой поверхности до точки калибровочной поверхности, в которой зависимость интенсивности зарегистрированного излучения от номера изображения в наибольшей степени подобна зависимости в исследуемой точке контролируемого объекта.
Недостатками данного способа являются: 1) необходимость регистрировать более двух изображений структуры подсветки; 2) необходимость в обеспечении подсветки и ее модуляции и зависимости расположения активного канала от регистрирующего канала.
Также известен способ распознавания формы объектов (А.С. №16667273, H04N 5/33, 1991 г., Бюл. №28), заключающийся в сканировании поверхности объекта по строке и кадру, поляризации собственного теплового излучения объекта, преобразовании поляризованного теплового сигнала в электрический сигнал с последующим запоминанием, формировании четырех поляризационных тепловизионных изображений объекта с азимутами поляризации 0, 45, 90, 135° соответственно для определения формы объекта по формулам, сформированным на значениях видеосигналов этих четырех термограмм.
Недостатком этого способа является тот факт, что он не учитывает эллиптичность поляризации теплового излучения реальных объектов, что ограничивает его применение только для объектов с частично линейно-поляризованным тепловым излучением и невозможность производить распознавание в реальном масштабе времени.
Наиболее близкий, по сути к достигаемому результату, является выбранный в качестве прототипа способ тепловизионного распознавания формы объектов (патент РФ №2141735, кл. H04N 5/33, G01B 11/24, 20.11.1999). Способ заключается в сканировании поверхности объекта, поляризации собственного теплового излучения объекта, преобразовании поляризованного тепловизионного сигнала в электрический с последующим запоминанием и анализом электрического сигнала, формировании двух поляризационных тепловизионных изображений с азимутами поляризации 45 и 90 градусов соответственно, а форма объекта внутри контура определяется по формулам, сформированным на значениях видеосигналов этих двух термограмм.
Недостатком данного способа является отсутствие возможности реализовать процесс распознавания формы объектов в реальном масштабе времени. Это связанно с тем, что необходимо зафиксировать во времени азимуты поляризации теплового излучения объекта, равные 45 и 90 градусов и при этих азимутах запомнить термограммы, а потом проводить анализ видеосигналов элементов изображения для получения через них формы объекта внутри контура.
Задачей, на решение которой направлен заявленный способ, является дистанционное распознавание формы объекта внутри его тепловизионного контура на основе одного поляризационного изображения.
Технический результат, достигаемый при решении поставленной задачи, заключается в распознавании и трехмерной визуализации формы объекта в реальном масштабе времени, расширение информативности тепловизионного канала оптических и оптико-электронных систем распознавания трехмерных объектов.
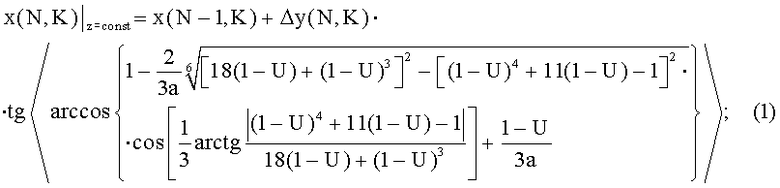
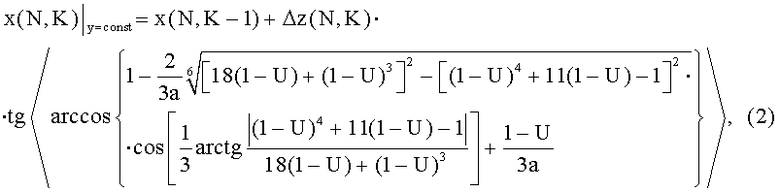
Поставленная задача достигается за счет того, что в способе тепловизионного распознавания формы объектов, заключающемся в сканировании поверхности объекта, поляризации его оптического излучения, преобразовании поляризационного тепловизионного сигнала в электрический с последующим запоминанием и анализом сигнала и формировании поляризационного тепловизионного изображения объекта согласно изобретению формируют одно тепловизионное изображение, получаемое с использованием комбинированного поляризационного фильтра, при этом форму объекта внутри его контура определяют выражениями

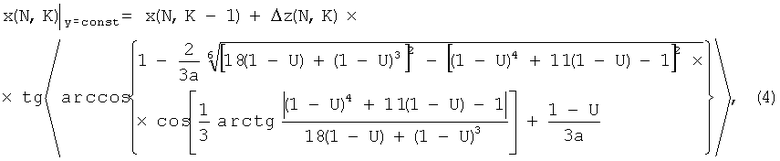
где x, y, z - декартовые координаты на поверхности объекта; K, N - номер строки и элемента строки тепловизионного кадра; Δy, Δz - шаг сканирования при сканировании вдоль координат OY и OZ; U - величина видеосигнала тепловизионного изображения с комбинированным поляризационным фильтром; a - постоянная, характеризующая материал и шероховатость поверхности объекта.
Рассмотрим методическое обоснование возможности распознавания объемной формы объектов на основе одной комбинированной поляризационной термограммы.
Вектор-параметр Стокса (Вектор-параметр Стокса - это характеристика оптического излучения, которая количественно описывает как энергетические, так и поляризационные свойства излучения объектов) собственного теплового излучения объекта имеет вид
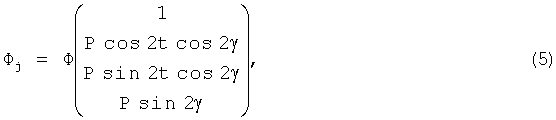
где Ф - поток собственного излучения объекта; P, t, γ - степень, азимут и степень эллиптичности поляризации теплового излучения объекта.
В качестве комбинированного поляризационного фильтра используется последовательно расположенные пластинка λ/4 с углом ориентации быстрой оси Θ=45° и линейный инфракрасный поляризатор с азимутом α=0°. Матрицы пропускания пластинки λ/4 и линейного поляризатора имеют вид
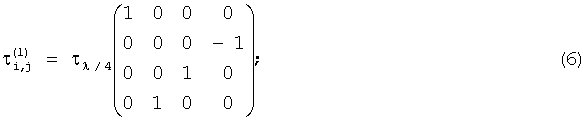
где τλ/4, τn - энергетический коэффициент пропускания пластинки λ/4 и поляризатора.
Так как первый элемент вектор-параметра Стокса теплового излучения, прошедшего через комбинированный фильтр, представляет собой значение энергетического потока теплового излучения объекта, то выходной сигнал на выходе приемника излучения записывается в виде

где S - чувствительность приемника излучения, который располагается после комбинированного фильтра.
На основании формул


где ε⊥, ε|| - перпендикулярная и параллельная компоненты коэффициента излучения материала поверхности объекта, то уравнение для выходного сигнала в нормированном виде записывается в виде

Учитывая выражение связи степени поляризации P поляризации теплового излучения плоского элемента поверхности с углом ориентации ψ элемента по отношению к наблюдателю

и формулу (11), получим связь угла ориентации локальных элементов поверхности объекта через видеосигналы U этих элементов

Эта функциональная связь угла ψ и видеосигнала U и используется для определения формы объекта.
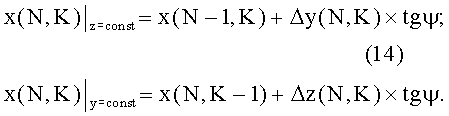
Практически при обработке термограмм процесс определения формы объектов осуществляется по следующим выражениям:
На чертеже изображена схема работы способа. Схема включает измеряемый объект 1, комбинированный поляризационный фильтр 2, который представляет собой последовательно расположенные пластинку λ/4 и инфракрасный поляризатор, оптическую систему 3, матричный приемник излучения 4, блок усиления 5, блок обработки информации 6, блок хранения информации 7, ЭВМ 8, программное обеспечение 9 и устройство вывода информации 10.
Работа способа заключается в следующем: тепловое излучение исследуемого объекта 1 проходит комбинированный поляризационный фильтр 2, на выходе которого излучение приобретает в общем виде эллиптическую форму поляризации, далее излучение фокусируется оптической системой 3 на матричный приемник излучения (МПИ) 4, где преобразовывается в электрический сигнал, сигнал от МПИ поступает на вход блока усиления 5, из которого поступает в блок обработки информации 6, далее информация поступает в блок хранения 7, из блока хранения передается на ЭВМ, где программным обеспечением 9 производится обработка и вычисление декартовых координат, две из трех декартовых координат определяются размерами теплового изображения, а вычисление третьей координаты осуществляется за счет функциональной зависимости степени поляризации теплового излучения каждого из элементов изображений от угла ориентации излучающей площадки относительно направления ее наблюдения и передается на устройство вывода информации 10.
Способ тепловизионного распознавания формы поверхности объектов может быть использован в оптических и оптико-электронных системах распознавания, измерительной технике для измерения размеров и визуализации профиля измеряемой поверхности трехмерных объектов. Главное преимущество предлагаемого способа распознавания формы объектов перед известными способами заключается в отсутствии необходимости обеспечивать подсветку измеряемого объекта, способ учитывает эллиптичность поляризации теплового излучения реальных объектов, что расширяет его применение для объектов с частично линейно-поляризованным тепловым излучением, а использование для распознавания одного поляризационного теплового изображения позволяет осуществлять распознавание формы объектов в реальном масштабе времени, что упрощает использование и реализацию устройств на его основе, также значительно расширяет сферу его использования в науке и технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 1995 |
|
RU2141735C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469265C1 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 1991 |
|
RU2024212C1 |
| Способ тепловизионного распознавания формы объекта | 1989 |
|
SU1667273A1 |
| ТЕПЛОВИЗИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2099759C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| ПОЛЯРИЗАЦИОННО-ФОТОННЫЙ ДЕТЕКТОР НИЗКОКОНТРАСТНЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ТВЕРДОТЕЛЬНЫХ КАРТИННО ОРИЕНТИРОВАННЫХ ЛИНЕЙНЫХ МИКРОПОЛЯРИЗАТОРОВ | 2023 |
|
RU2831223C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 1997 |
|
RU2107281C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
Способ тепловизионного распознавания формы объектов относится к области тепловизионной техники и может быть использован для дистанционного распознавания и измерения формы объектов и визуализации профиля их сплошной поверхности. Техническим результатом является дистанционное распознавание формы объекта внутри его тепловизионного контура на основе одного поляризационного изображения. Результат достигается тем, что сканируют поверхность объекта, производят поляризацию оптического излучения объекта, преобразуют поляризационный тепловизионный сигнал в электричекий с последующим запоминанием и анализом электрического сигнала, формируют поляризационное тепловизионное изображение, распознают форму объекта в реальном масштабе времени путем обработки одного тепловизионного изображения, получаемого с использованием комбинированного поляризационного фильтра. 1 ил.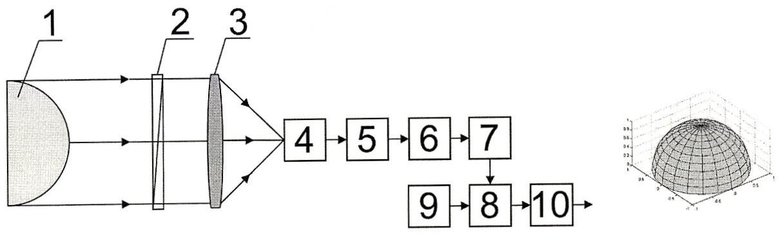
Способ тепловизионного распознавания формы объектов, заключающийся в сканировании поверхности объекта, поляризации оптического излучения объекта, преобразовании поляризованного тепловизионного сигнала в электрический с последующим запоминанием и анализом электрического сигнала, формировании поляризационного тепловизионного изображения объекта и определении формы объекта, отличающийся тем, что форму объекта распознают в реальном масштабе времени путем обработки одного тепловизионного изображения, получаемого с использованием комбинированного поляризационного фильтра, при этом форму объекта внутри его контура определяют выражениями:
где х, у, z - декартовые координаты на поверхности объекта; K, N - номер строки и элемента строки тепловизионного кадра; Δy, Δz - шаг сканирования при сканировании вдоль координат OY и OZ; U - величина видеосигнала тепловизионного изображения с комбинированным поляризационным фильтром; а - постоянная, характеризующая материал и шероховатость поверхности объекта.
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 1995 |
|
RU2141735C1 |
| ТЕПЛОВИЗИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2099759C1 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 1991 |
|
RU2024212C1 |
| Способ тепловизионного распознавания формы объекта | 1989 |
|
SU1667273A1 |
| JP 60216229 А, 1985.10.29 | |||
| JP 60030279 А, 1985.02.15. | |||

