Настоящее изобретение относится к способу и устройству управления силовым агрегатом транспортного средства.
Из заявки DE-A 19536038 известны способ и устройство управления двигателем внутреннего сгорания (ДВС), при этом для обеспечения надежной работы системы управления ДВС по меньшей мере на основании положения некоторого задействуемого водителем органа управления задают максимально допустимое значение развиваемого ДВС крутящего момента. С этим значением сравнивается фактически развиваемый ДВС крутящий момент. Если фактический крутящий момент превышает максимально допустимый крутящий момент, то предполагается наличие неисправности или сбоя в работе системы управления и в качестве реакции на подобную неисправность или сбой принимаются соответствующие ответные меры, направленные на уменьшение фактического крутящего момента вновь ниже максимально допустимого крутящего момента. Эффективность подобного контроля за величиной крутящего момента в существенной степени зависит от точности измерения фактического крутящего момента. По этой причине для улучшения контроля за работоспособностью системы управления ДВС согласно заявке DE 19742083 А1 было предложено отключать в определенных режимах работы контроль за величиной крутящего момента. С этой целью в том случае, если при определенном положении педали акселератора частота вращения вала двигателя превышает некоторую заданную частоту вращения, отключают подачу топлива.
Помимо этого в заявке DE 19913272.0, поданной 24.03.1999, предложен ограничитель частоты вращения, ограничивающий частоту вращения вала двигателя некоторой заданной контрольной или пороговой частотой вращения. При этом подобная функция по ограничению частоты вращения активизирована прежде всего при полностью отпущенной педали акселератора. С учетом особенностей работы такого ограничителя соответственно с учетом необходимости обеспечения комфортабельности езды при активизированном ограничителе по меньшей мере в некоторых рабочих ситуациях требуется соответствующая адаптация.
Из заявки DE 4239711 А1 известен способ, на примере которого поясняется возможность преобразования заданного значения крутящего момента в управляющие воздействия, направленные на изменение степени наполнения цилиндров ДВС, угла опережения зажигания и/или количества временно отключаемых цилиндров.
Из заявки DE 19506082 А1 известны устройство и способ управления силовым агрегатом транспортного средства, наиболее близкие к изобретению по технической сущности. При осуществлении известного способа определяют по меньшей мере частоту вращения вала силового агрегата, и по меньшей мере в одном режиме работы управление силовым агрегатом осуществляют таким образом, чтобы частота вращения его вала не превышала заданной предельной частоты вращения. Кроме того, при осуществлении этого способа по меньшей мере в одном режиме работы силового агрегата активизирован ограничитель, задающий в зависимости от частоты вращения поправочное значение, на которое корректируется управляющее воздействие на изменение регулируемого параметра силового агрегата.
Для повышения комфортабельности езды и эффективности работы ограничителя в предлагаемом в изобретении способе предусмотрена возможность управления эффективностью оказываемого задаваемым поправочным значением влияния в зависимости по меньшей мере от одного другого рабочего параметра.
При этом особое преимущество состоит в том, что учитывается взаимодействие ограничителя с другими функциями системы управления двигателем. Благодаря этому исключается возможность взаимно противоречащей работы ограничителя и регулятора частоты вращения при холостом ходе и/или ограничителя и функций по обеспечению комфортабельности езды (например, функции по демпфированию дроссельной заслонки, функции по предотвращению скачкообразного изменения нагрузки, функции по предотвращению рывков при движении автомобиля и т.д.) и тем самым предотвращается ухудшение комфортабельности езды, соответственно эффективности работы ограничителя.
Согласно одному из вариантов наиболее предпочтительно ограничивать выдаваемые предусмотренным в ограничителе интегратором значения, при этом в качестве нижнего предельного значения в предпочтительном варианте используется отрицательное значение заданной величины управляющего воздействия, направленного на изменение некоторого регулируемого параметра силового агрегата (например, заданное значение крутящего момента). Благодаря этому такая заданная величина никогда не может принимать значения меньше нуля. Тем самым при активизированном ограничителе исключается формирование отрицательного значения крутящего момента силового агрегата (режим торможения) и связанное с этим ухудшение комфортабельности езды.
Упомянутым выше другим рабочим параметром предпочтительно также является частота вращения вала силового агрегата, а эффективность оказываемого поправочным значением влияния зависит от этой частоты вращения, при этом при частотах вращения ниже некоторой заданной частоты вращения, лежащей в диапазоне частот вращения при холостом ходе, поправочное значение не оказывает влияния на управляющее воздействие. В этом случае в интервале частот вращения, ограниченном заданной частотой вращения и предельной частотой вращения, эффективность оказываемого поправочным значением влияния монотонно возрастает.
В другом частном варианте осуществления предлагаемого в изобретении способа вышеупомянутым другим рабочим параметром может быть рабочее состояние функции по обеспечению комфортабельности езды, такой как функция по демпфированию дроссельной заслонки. Когда такая функция активизирована, управление поправочным значением может осуществляться таким образом, чтобы оно не оказывало влияния на управляющее воздействие. Таким образом, в соответствии с изобретением предпочтительно активизировать ограничитель после отключения такой функции по обеспечению комфортабельности езды. В сочетании с функцией, сглаживающей резкое изменение крутящего момента при отпускании педали акселератора (функция по демпфированию дроссельной заслонки), подобный подход позволяет избежать резкого ограничения ограничителем развиваемого двигателем крутящего момента, когда водитель при движении транспортного средства на высокой скорости с включенным сцеплением полностью отпускает педаль акселератора, благодаря чему обеспечивается плавный переход в рабочий диапазон, заданный ограничителем.
В еще одном частном варианте осуществления предлагаемого в изобретении способа вышеупомянутым другим рабочим параметром может быть рабочее состояние функции по отключению подачи топлива в режиме принудительного холостого хода. Когда такая функция активизирована, управление поправочным значением может осуществляться таким образом, чтобы оно не оказывало влияния на управляющее воздействие.
Еще одно преимущество состоит в том, что для ограничения частоты вращения вместо ПИД-регулятора может применяться управляемый интегратор с переключаемыми в зависимости от рабочих условий режимами работы. При этом минимальное предельное значение, выдаваемое интегратором, может быть задано в зависимости от частоты вращения вала силового агрегата и заданного значения крутящего момента, на которое должен установиться развиваемый силовым агрегатом крутящий момент. В частности, минимальное значение может быть равно 0 при активизированной функции по обеспечению комфортабельности езды, при отключенной подаче топлива в двигатель внутреннего сгорания (ДВС) или при нахождении педали акселератора в положении, отличном от положения, соответствующего режиму холостого хода.
Связанное с этим преимущество заключается в возможности задавать режим работы интегратора (увеличение или уменьшение выходной величины либо его отключение) в зависимости от режимов работы системы и таким путем предотвращать возникновение колебаний, обусловленных взаимодействием интеграторов, предусмотренных в ограничителе частоты вращения и в регуляторе частоты вращения при холостом ходе.
Еще одно преимущество состоит в том, что использование отражающей зависимость от частоты вращения характеристики позволяет отделить область действия регулятора частоты вращения при холостом ходе от области действия ограничителя. Задание весовых коэффициентов для выходного сигнала ограничителя в зависимости от частоты вращения вала позволяет уменьшать или приостанавливать влияние ограничителя на управляющее воздействие в тех диапазонах частот вращения, в которых для поддержания заданной частоты вращения на холостом ходу обычно работает регулятор частоты вращения при холостом ходе. В тех же диапазонах частот вращения, которые лежат вблизи пороговой частоты вращения, ограничитель работает "на полную мощность". Благодаря этому удается практически полностью отделить одну от другой области действия обеих функций и тем самым исключить их отрицательное взаимное влияние.
Выходной сигнал ограничителя может быть выходным сигналом интегратора, выдаваемое которым значение изменяется в первом направлении, когда по меньшей мере частота вращения вала силового агрегата меньше заданной частоты вращения, задаваемой регулятором частоты вращения при холостом ходе, и меньше предельной частоты вращения и выдаваемое которым значение изменяется в другом направлении, когда отсутствует указанное условие и когда по меньшей мере частота вращения превышает предельную частоту вращения, а в остальных случаях интегратор может находиться в отключенном состоянии. Кроме того, выходной сигнал ограничителя для управления силовым агрегатом может логически комбинироваться с заданным значением крутящего момента.
Объектом изобретения является также устройство управления силовым агрегатом транспортного средства, имеющее, как и ближайший аналог, блок управления, выполненный с возможностью определять по меньшей мере частоту вращения вала этого силового агрегата и формировать выходной сигнал для управления им, и ограничитель, позволяющий по меньшей мере в одном режиме работы влиять на указанный выходной сигнал таким образом, чтобы частота вращения вала силового агрегата была ограничена заданной предельной частотой вращения, и при этом выполненный с возможностью задавать в зависимости от частоты вращения поправочное значение, на которое корректируется управляющее воздействие на изменение регулируемого параметра силового агрегата. Отличие изобретения заключается в том, что предусмотрена возможность управления эффективностью оказываемого этим поправочным значением влияния в зависимости по меньшей мере от одного другого рабочего параметра.
Предлагаемое в изобретении решение позволяют сохранить все преимущества ограничителя пороговой частоты вращения. К одним из таких его преимуществ относится независимость от разброса характеристик и параметров конкретных двигателей, от срока эксплуатации двигателя, а также от преобладающих в конкретный момент времени условий окружающей среды (таких как температура, высота над уровнем моря и т.д.). Подобный ограничитель позволяет снизить затраты на решение прикладных задач, поскольку при контроле нет необходимости учитывать каждый из параметров, некоторые из которых при возникновении неисправности могли бы оказывать направленное на увеличение крутящего момента воздействие. По этой же причине упрощается и разработка новых или совершенствование существующих систем, поскольку упрощается введение новых параметров, которые не должны учитываться при контроле. Кроме того, возможности применения ограничителя не ограничены конкретным типом системы управления, будь то, например, система управления двигателем с впрыскиванием топлива во впускной коллектор, система управления двигателем с непосредственным впрыскиванием бензина, система управления дизельным двигателем или система управления концептуально иным приводом (например, электродвигателем).
Другие преимущества изобретения представлены в последующем описании некоторых вариантов его осуществления.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схема системы управления ДВС,
на фиг.2 и 3 - функциональные схемы, условно отражающие структуру программы, заложенной по меньшей мере в один микрокомпьютер системы управления, и относящиеся к предпочтительному варианту выполнения ограничителя,
на фиг.4 - пример характеристики, отражающей зависимость от частоты вращения и позволяющей пояснить принцип разграничения областей действия регулятора частоты вращения при холостом ходе и ограничителя, и
на фиг.5 - характеристика, отражающая изменение коэффициента усиления интегратора в функции частоты вращения.
На фиг.1 схематично показан электронный блок 10 управления, имеющий по меньшей мере один входной контур 12, по меньшей мере один микрокомпьютер 14 и по меньшей мере один выходной контур 16. Эти компоненты, т.е. входной контур, микрокомпьютер и выходной контур, соединены между собой системой 18 связи, предназначенной для взаимного обмена данными между ними. Ко входному контуру 12 подведены несколько входных линий, которыми являются входная линия 20 от измерительного устройства 22, предназначенного для определения положения педали акселератора wped, входная линия 24 от измерительного устройства 26, предназначенного для определения положения дроссельной заслонки wdk, входная линия 28 от измерительного устройства 30, предназначенного для определения количества или расхода воздуха hfm, впускаемого в ДВС, входная линия 32 от измерительного устройства 34, предназначенного для определения частоты вращения nmot вала двигателя, а также входные линии 36-40 от измерительных устройств 42-46, предназначенных для определения иных рабочих параметров ДВС и/или транспортного средства, которые необходимы для управления работой двигателя, или величин, на основании которых определяются подобные рабочие параметры и которыми, например, являются температура впускаемого в ДВС воздуха, давление окружающей среды и т.д. С помощью выходного контура 16 электронный блок 10 управления управляет развиваемой ДВС мощностью. Так, в частности, блок управления управляет степенью наполнения цилиндров ДВС, оказывая влияние на подачу воздуха в ДВС регулированием положения дроссельной заслонки 48. Помимо этого блок управления регулирует момент зажигания (линия 50), оказывает влияние на дозирование топлива (линия 52) и/или управляет турбонагнетателем (линия 54).
Предпочтительные принципы, лежащие в основе управления работой двигателя, осуществляемого блоком 10 управления, известны из рассмотренного в начале описания уровня техники. Так, в частности, на основании по меньшей мере величины, характеризующей положение педали акселератора wped, рассчитывается заданное значение крутящего момента, который в текущем режиме должен развивать ДВС и который соответствует задаваемому водителем режиму движения. Это заданное значение преобразуется при необходимости с учетом других заданных значений крутящего момента, поступающих от внешних и внутренних функциональных систем, таких как противобуксовочная система, система ограничения частоты вращения вала двигателя, система ограничения максимальной скорости движения автомобиля и иные системы, в заданное значение крутящего момента. Затем это заданное значение крутящего момента преобразуется по меньшей мере с учетом частоты вращения вала двигателя с помощью соответствующих многопараметровых характеристик, таблиц или вычислений в заданное значение степени наполнения цилиндра воздухом, т.е. в заданное значение относительной степени наполнения цилиндра воздухом за один ход поршня в цилиндре, нормированное на максимально возможную степень такого наполнения воздухом. На основании этого заданного значения степени наполнения цилиндра воздухом с учетом физических взаимосвязанных параметров впускного трубопровода определяется по меньшей мере заданное значение для положения дроссельной заслонки. Далее с помощью соответствующего регулирующего контура дроссельная заслонка устанавливается в это заданное положение. Помимо этого с учетом при необходимости фактического значения крутящего момента, вычисляемого, например, на основании пропорционального расходу воздуха сигнала, выдается управляющее воздействие на изменение угла опережения зажигания и/или количества дозируемого топлива, и таким путем фактический крутящий момент изменяется в сторону заданного крутящего момента. Наряду с этим согласно одному из вариантов блок 10 управления осуществляет кратко рассмотренное в начале описания сравнение фактического крутящего момента с максимально допустимым крутящим моментом и при обнаружении неисправности или сбоя в работе системы управления двигателем активизирует заданные ответные меры в качестве реакции на подобную неисправность или сбой.
Следует особо отметить, что рассмотренный ниже ограничитель не только может использоваться в представленной в описании системе управления работой двигателя, но и с достижением соответствующих преимуществ может найти применение во всех тех системах, в которых заданное управляющее воздействие на изменение некоторого регулируемого параметра (крутящего момента, мощности, частоты вращения, углового положения дроссельной заслонки и т.д.) формируется в зависимости по меньшей мере от положения задействуемого водителем органа управления.
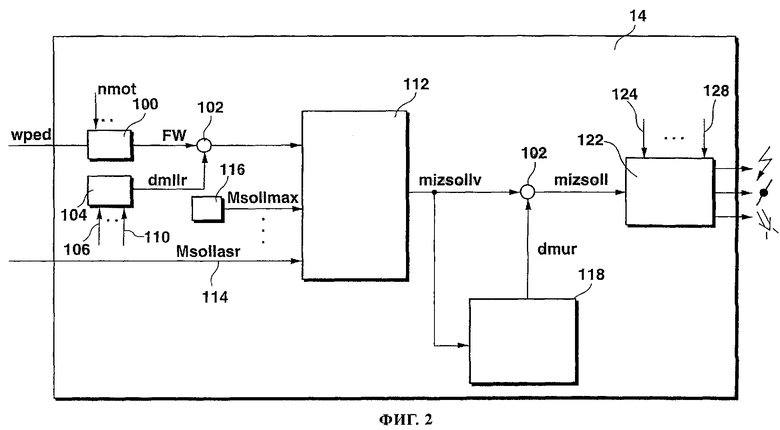
Помимо этого в системе управления используется ограничитель частоты вращения, с помощью которого частота вращения вала двигателя ограничивается некоторой заданной пороговой частотой вращения, предпочтительно определяемой в зависимости от положения педали акселератора или от задаваемого водителем значения некоторой регулируемой величины (например, от задаваемого водителем крутящего момента), за счет уменьшения заданного значения соответствующего регулируемого параметра. Показанная на фиг.2 функциональная схема позволяет пояснить принцип интеграции подобного ограничителя частоты вращения в рассмотренную выше при описании уровня техники систему управления силовым агрегатом на основе крутящего момента. Соответствующая интеграция ограничителя какого-либо иного параметра осуществляется в системах управления на основании одного из вышеуказанных других физических параметров.
По многопараметровой характеристике 100 на основании величины wped, характеризующей положение педали акселератора, а также на основании других рабочих параметров, таких как частота вращения nmot вала двигателя, определяется задаваемый водителем крутящий момент FW. Это значение в точке 102 логически комбинируется с выходным значением dmllr регулятора 104 частоты вращения при холостом ходе. Подобный регулятор представляет собой при этом обычный регулятор частоты вращения при холостом ходе, который в зависимости от определенных рабочих параметров (см. 106-110) формирует заданное значение частоты вращения при холостом ходе, сравнивает это заданное значение с фактической частотой вращения и в зависимости от величины выявленного рассогласования между этими значениями формирует в соответствии с заданной стратегией регулирования выходной сигнал, который подается в точку 102 логического комбинирования в качестве поправочного значения крутящего момента dmllr, на которое следует скорректировать значение задаваемого водителем крутящего момента FW. Скорректированное значение задаваемого водителем крутящего момента подается далее в координатор 112, в который поступают также заданные значения крутящего момента от внешних систем (линия 114), таких, например, как противобуксовочная система, система регулирования тягового момента, развиваемого двигателем, система управления коробкой передач и т.д., а также заданные значения крутящего момента от внутренних функциональных блоков, таких, например, как ограничитель 116 максимальной частоты вращения, ограничитель крутящего момента и т.д. Координатор 112 на основании этих поступающих в него заданных значений крутящего момента выбирает в соответствии с заданной стратегией управления результирующее заданное значение крутящего момента mizsollv. Это результирующее заданное значение крутящего момента подается в ограничитель 118 частоты вращения. На основании этого сигнала, а также иных рабочих параметров, более подробно рассмотренных ниже при описании показанной на фиг.3 схемы, ограничитель 118 частоты вращения определяет поправочное значение dmur, на которое следует скорректировать результирующее заданное значение крутящего момента mizsollv во избежание превышения заданной предельной частоты вращения. Это поправочное значение логически комбинируется в точке 102 с заданным значением крутящего момента, предпочтительно суммируется с ним, и таким путем формируется заданное значение крутящего момента mizsollv. Это заданное значение крутящего момента подается далее в формирователь 122 управляющих воздействий, который в зависимости от различных рабочих параметров (линии 124-128) и от заданного значения крутящего момента формирует, например, в соответствии с методикой, рассмотренной в указанном в начале описания уровне техники, управляющие воздействия, по которым регулируется угол опережения зажигания, количество дозируемого топлива, подача воздуха и т.д., что в результате позволяет в общем и целом установить фактически развиваемый силовым агрегатом крутящий момент на заданное значение.
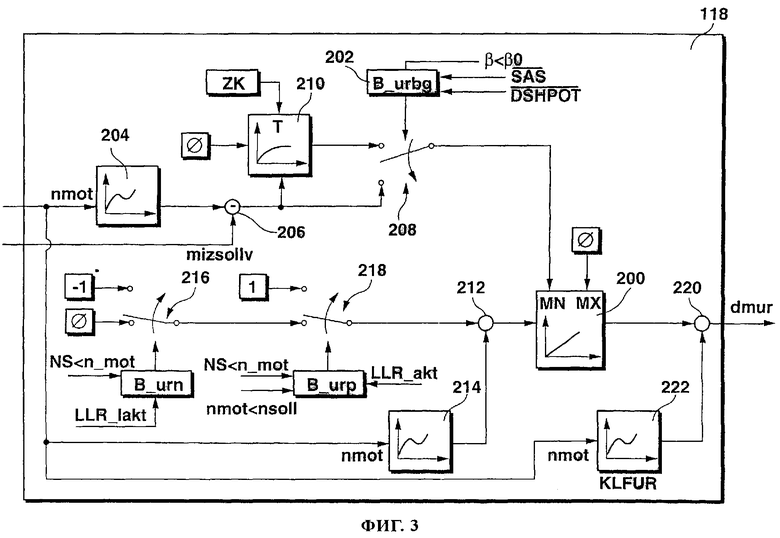
На фиг.3 показана функциональная схема ограничителя 118 частоты вращения, выполненного по предпочтительному варианту. Подобная функциональная схема условно отражает структуру программы, заложенной в микрокомпьютер 14, при этом отдельные блоки соответствуют отдельным шагам или элементам программы, а соединительные линии соответствуют потокам информации.
В качестве входных величин или параметров в ограничитель 118 поступают по меньшей мере значение частоты вращения nmot вала двигателя и сформированное координатором заданное значение крутящего момента mizsollv. При не нажатой педали акселератора ограничитель 118 согласно предпочтительному варианту ограничивает заданный крутящий момент некоторой величиной, при которой исключается превышение некоторой, определяемой на прикладном уровне частоты вращения NS (например, 1500 об/мин). Выходным параметром dmur ограничителя является корректирующее задающее воздействие, по которому соответственно корректируется заданное значение крутящего момента. Существенным моментом при этом является возможность регулировать оказываемое ограничителем воздействие в зависимости по меньшей мере от еще одного рабочего параметра (на чертеже подобные рабочие параметры представлены в виде рабочих условий B_urp, B_urn, B_urbg и в виде характеристики, отражающей зависимость от частоты вращения nmot).
Существенным компонентом ограничителя является управляемый интегратор 200. При этом выдаваемое этим интегратором значение ограничено некоторым максимальным значением MX и некоторым минимальным значением MN. Этот интегратор является управляемым, поскольку подаваемый на его вход сигнал может за счет соответствующего переключения принимать значения 0, 1 и -1, что тем самым позволяет задавать режим работы интегратора (увеличение или уменьшение выходной величины либо его отключение) в зависимости от конкретного режима работы системы. Тем самым удается исключить взаимодействие между ограничителем и интегратором регулятора частоты вращения при холостом ходе и избежать возникновения в системе обусловленных подобным взаимодействием колебаний.
Верхним предельным значением, выдаваемым интегратором 200, в принципе является 0. За нижнее предельное значение в одном из режимов работы принимается взятое со знаком "-" значение mizsollv, которое дополнительно корректируется в зависимости от частоты вращения. Благодаря этому выдаваемое интегратором значение не может выйти за пределы его рабочего диапазона. За счет ограничения минимального значения отрицательным значением заданной величины по меньшей мере в одном режиме работы нижний предел всегда устанавливается на такое значение, при котором выдаваемое заданное значение не может быть меньше 0. Минимальное предельное значение, выдаваемое интегратором 200, задается в зависимости от заданного рабочего условия B_urbg (см. также 202) либо равным нулю, либо равным скорректированному в зависимости от частоты вращения заданному значению.
Переключение между обоими предельными значениями осуществляется переключательным элементом 208 в зависимости от наличия или отсутствия условия B_urbg, при этом при наличии такого условия переключательный элемент переключается из показанного на чертеже положения во второе его положение. Рабочему условию B_urbg соответствует установка педали акселератора в положение, соответствующее работе двигателя на холостом ходу, без прекращения подачи топлива в режиме принудительного холостого хода и без активизации функций по обеспечению комфортабельности, таких как функция по демпфированию дроссельной заслонки (DSHPOT).
При наличии указанных условий на основании фактической частоты вращения по характеристике 204 определяется значение, из которого в точке 206 вычитается заданное значение mizsollv. При этом указанная характеристика 204 задана таким образом, что она отражает изменение того минимально индицируемого крутящего момента в зависимости от частоты вращения, при котором при минимальной степени наполнения воздухом цилиндров и при позднем угле опережения зажигания еще может произойти сгорание рабочей смеси. Результат такого вычитания подается через переключательный элемент 208 в интегратор 200 в качестве минимального значения. По меньшей мере в одной рабочей точке выходное значение, определяемое по указанной характеристике, равно нулю, и в этом случае минимальным значением является отрицательное значение заданной величины.
При отсутствии же одного из указанных рабочих условий, т.е. при нахождении переключательного элемента в показанном на чертеже положении, в качестве минимального значения задается выходное значение фильтра 210 нижних частот. Этот фильтр имеет некоторую постоянную времени ZK, а его входное значение всегда равно 0. Таким образом, при изменении сигнала, свидетельствующего о наличии рабочего условия B_urbg, фильтр нижних частот инициализируется по выходному сигналу от точки 206 вычитания, а предельное значение приравнивается в соответствии с функцией такого фильтра нижних частот к 0. С функциональной точки зрения это означает, что выходной сигнал интегратора 200 может иметь отличное от 0 значение только при наличии сигнала, свидетельствующего о наличии или соблюдении рабочего условия B_urbg. Если же указанное условие не соблюдается, то минимальное значение приближается фильтром нижних частот к максимальному значению, и поэтому выдаваемое интегратором 200 значение равно 0.
Помимо этого ограничитель активизируется только в тех случаях, когда не активизирована ни одна из функций по обеспечению комфортабельности езды, таких как функция по демпфированию дроссельной заслонки, а педаль акселератора находится в полностью отпущенном положении, т.е. положении, соответствующем работе двигателя на холостом ходу. Подобный подход позволяет предотвратить скачкообразное ограничение развиваемого двигателем крутящего момента в случае резкого отпускания педали акселератора при движении автомобиля с включенным сцеплением на высокой скорости. Благодаря этому комфортабельность езды сохраняется.
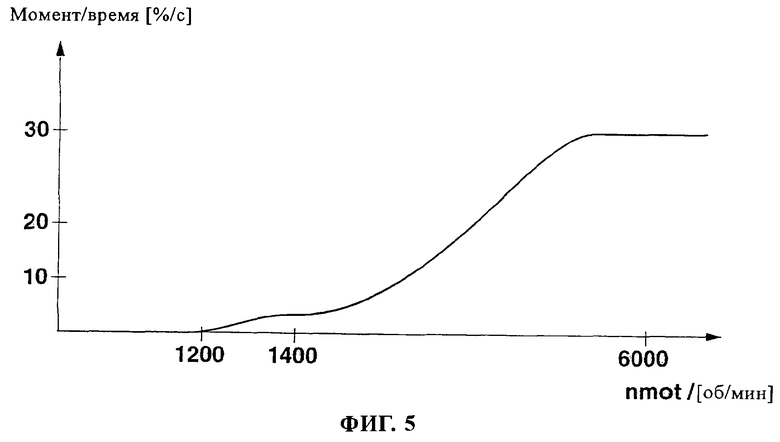
Поступающая в интегратор входная величина формируется в точке 212 перемножения. В эту точку перемножения подается выходной сигнал, значение которого считано по характеристике 214 в зависимости от частоты вращения. Эта характеристика отражает изменение коэффициента усиления интегратора в функции частоты вращения. Примером подобной характеристики служит показанная на фиг.5 характеристика с монотонным возрастанием выходных значений (крутящего момента в единицу времени) с увеличением частоты вращения за пределами диапазона частот вращения при холостом ходе. Второй входной сигнал, поступающий в точку 212 перемножения, может принимать в зависимости от наличия того или иного рабочего условия значение 0, значение -1 или значение +1. Значение 0 поступает в точку 212 перемножения в том случае, когда переключатель 216, переключаемый в зависимости от сигнала, свидетельствующего о наличии рабочего условия B_urn, а также переключатель 218, переключаемый в зависимости от сигнала, свидетельствующего о наличии рабочего условия B_urp, находятся в их показанных на чертеже положениях. Когда же переключатель 218 находится в другом его положении, не показанном на чертеже, указанное входное значение равно 1. Когда переключатель 218 находится в показанном на чертеже положении, а переключатель 216 находится в другом, не показанном на чертеже положении, входное значение равно -1.
Сигнал, свидетельствующий о наличии рабочего условия B_urp, выдается в том случае, когда частота вращения nmot вала двигателя меньше пороговой частоты вращения NS и ниже заданной частоты вращения nsoll при холостом ходе и когда активизирован регулятор частоты вращения при холостом ходе. При наличии указанных условий формируется сигнал, который свидетельствует о наличии рабочего условия B_urp и по которому переключатель 218 переключается в не показанное на чертеже положение, в результате чего в точку 212 перемножения поступает значение, равное 1.
Другой сигнал, свидетельствующий о наличии рабочего условия B_urn, выдается в том случае, когда частота вращения вала двигателя превышает пороговую частоту вращения NS или когда активизирована интегральная составляющая системы регулирования частоты вращения при холостом ходе. При наличии одного из этих условий формируется указанный сигнал, по которому переключатель 216 переключается в не показанное на чертеже положение, а в точку 212 перемножения при нахождении переключателя 218 в соответствующем положении поступает значение, равное -1.
При отсутствии всех указанных выше сигналов входной сигнал, поступающий в точку 212 перемножения, а тем самым и входной сигнал, поступающий в интегратор 200, имеют нулевое значение.
Сигнал, свидетельствующий о наличии условия B_urp, указывает на то, что воздействия со стороны системы регулирования частоты вращения при холостом ходе и со стороны ограничителя имеют взаимно противоположную направленность, т.е. противоречат друг другу. Поэтому входной сигнал имеет значение 1, поскольку выдаваемое интегратором 200 значение может изменяться в положительном направлении (от отрицательного значения в сторону нулевого значения), и в результате ограничивающее воздействие исчезает.
Значение -1 подается в том случае, когда необходимо ввести ограничение или когда нет оснований опасаться негативных последствий взаимодействия с интегратором регулятора частоты вращения при холостом ходе. При наличии этого условия интегратор формирует выходной сигнал, усиливающий ограничивающее воздействие, поскольку значение этого выходного сигнала увеличивается, а заданное значение соответственно уменьшается (dmur имеет отрицательное значение). Подобный эффект достигается только в том случае, когда отсутствует одно из условий, на основании которых формируется сигнал B_urp, поскольку в ином случае в интегратор подается значение 1.
Инициализация интегратора 200 подачей в него значения 0 производится в том случае, когда частота вращения вала двигателя в течение определенного промежутка времени остается ниже некоторой предельной частоты вращения, значение которой лежит в интервале между значением пороговой частоты вращения NS и максимальным значением частоты вращения при холостом ходе в установившемся режиме.
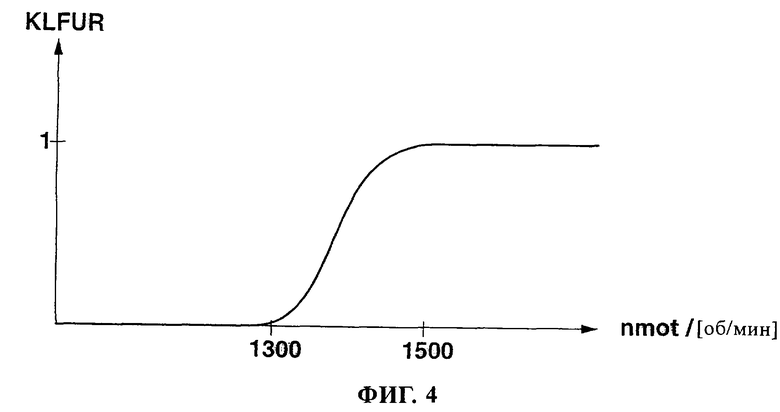
Выдаваемая интегратором 200 выходная величина подается в точку 220 перемножения, где она умножается на выходную величину KLFUR, выбираемую по характеристике 222. Эта характеристика отражает зависимость весового коэффициента от частоты вращения вала двигателя. Такой весовой коэффициент может принимать значения в пределах от 0 до 1. На фиг.4 в качестве примера показана характеристика, отражающая изменение поправочного коэффициента KLFUR в зависимости от частоты вращения вала двигателя. В этом примере поправочный коэффициент при частотах вращения ниже 1300 об/мин, т.е. в диапазоне частот вращения при холостом ходе, равен 0, а затем до достижения пороговой частоты вращения, равной 1500 об/мин, непрерывно увеличивается до значения 1. При этом частота вращения, ниже которой значение поправочного коэффициента равно 0, может соответствовать значению, при уменьшении частоты вращения ниже которого происходит инициализация интегратора 200.
Если в соответствии с этим частота вращения вала двигателя лежит в диапазоне частот вращения при холостом ходе, в котором значение поправочного коэффициента равно 0, выдаваемое интегратором значение умножается в точке 220 перемножения на значение 0, и поэтому выходной сигнал dmur также принимает значение 0. В этом диапазоне частот вращения активизирован только регулятор частоты вращения при холостом ходе. Выше этого диапазона частот вращения значение весового коэффициента монотонно возрастает, и поэтому с увеличением частоты вращения увеличивается оказываемое выходным сигналом dmur ограничителя воздействие, а тем самым увеличивается и само обладающее при определенных условиях ограничивающим влиянием воздействие. В результате практически полностью исключена возможность взаимно противоречивого действия регулятора частоты вращения при холостом ходе и ограничителя.
Согласно еще одному варианту для переключения переключателей 216 и 218 достаточно использовать отношение частоты вращения вала двигателя к предельной частоте вращения (пороговой частоте вращения).
Рассмотренный выше ограничитель может использоваться не только применительно к системам управления работой ДВС, но и применительно к приводам концептуально иных типов, например применительно к электродвигателям. Помимо этого описанное выше решение не ограничено его использованием только в ориентированных на регулирование крутящего момента схемах управления, а допускает его применение и в других технических системах (в системах управления мощностью, другими значениями крутящего момента, угловым положением дроссельной заслонки и т.д.).
Изобретение относится к способу управления двигателя внутреннего сгорания. Способ включает определение частоты вращения вала силового агрегата, управление им таким образом, чтобы частота вращения вала не превышала заданной предельной частоты вращения, в одном режиме работы активизирование ограничителя, при этом ограничитель в зависимости от частоты вращения задает поправочное значение, на которое корректируется управляющее воздействие на изменение регулируемого параметра силового агрегата. Рассмотрено устройство управления силовым агрегатом по меньшей мере в одном режиме работы. Ограничителем управляют в зависимости по меньшей мере от одного другого рабочего параметра таким образом, чтобы он не оказывал влияние на выходной параметр. Изобретение обеспечивает повышение эффективности работы устройства. 2 н. и 9 з.п. ф-лы, 5 ил.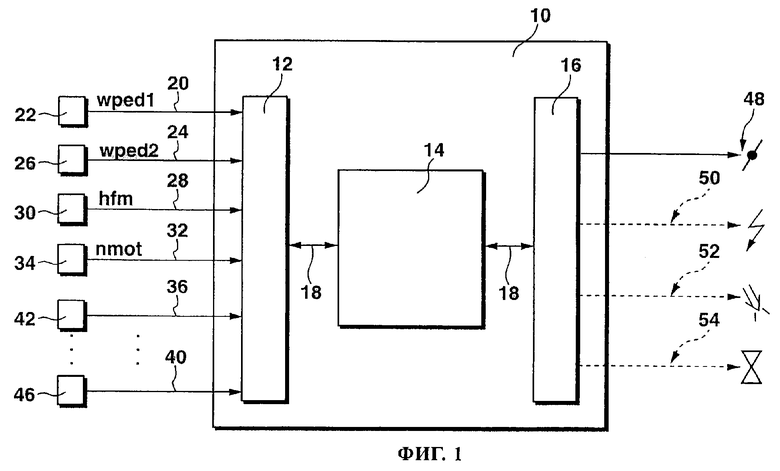
| DE 19506082 А, 29.08.1996 | |||
| СПОСОБ ДИАГНОСТИКИ НАРУШЕНИЯ ФУНКЦИЙ ПРЯМОЙ КИШКИ | 2004 |
|
RU2268647C2 |
| DE 3416539 А1, 08.11.1984 | |||
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2579672C1 |
| US 3433209 А, 28.07.1967. | |||

