Область техники, к которой относится изобретение
Изобретение относится к способу и устройству для контроля функционирования регулятора частоты вращения, прежде всего при осуществлении функции контроля тяги в системе управления дизельным двигателем.
Уровень техники
В системе управления дизельным двигателем при превышении фактической частотой вращения заданной частоты вращения более чем на заданное пороговое значение в качестве функции обнаружения и устранения неисправностей может активизироваться система контроля тяги. В случае активизации системы контроля тяги необходимо, чтобы регулятор частоты вращения привел свое соответствующее управляющее воздействие к нулю настолько быстро, чтобы по истечении заданного времени, составляющего около одной секунды и включающего любые другие вызывающие запаздывание функции, впрыскивание топлива было отключено, т.е. чтобы длительность включения форсунок была сведена к нулю.
Регуляторы частоты вращения, предусматриваемые в системе управления двигателем, работают в зависимости от области применения, т.е. типа и производителя транспортного средства, или в зависимости от различных наборов параметров транспортного средства, что приводит к различиям во времени отклика регулятора частоты вращения. Однако при вмешательстве функции контроля тяги для каждого набора параметров необходимо выполнить условие, что впрыскивание топлива должно отключиться в пределах заданного времени во избежание неадекватной реакции на замещающее включение режима контроля тяги. Для каждого типа транспортного средства или для каждой области применения двигателя внутреннего сгорания проверку каждого набора параметров приходится выполнять заново. Такая проверка выполняется с помощью соответствующих методов моделирования, причем проверяется, в особенности, то, приведет ли управляющее воздействие к прекращению впрыскивания в пределах заданного времени, т.е. одной секунды. Эта процедура является сложной и дорогостоящей.
Раскрытие изобретения
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработки способа и устройства, которые гарантировали бы, что при слишком большом отклонении частоты вращения от заданной управляющее воздействие регулятора частоты вращения уменьшится до нуля в пределах времени, в которое необходимо уложиться, без необходимости проверки в каждом конкретном случае параметров регулятора, установленных для конечного применения.
Эта задача решается в способе по пункту 1 формулы изобретения, а также в устройстве по другому независимому пункту формулы изобретения.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Первым объектом изобретения является способ контроля функционирования регулятора частоты вращения двигателя внутреннего сгорания. Предлагаемый в изобретении способ характеризуется тем, что обнаруживают превышение заданной частоты вращения в случае, если фактическая частота вращения двигателя внутреннего сгорания превышает заданную частоту вращения более чем на заданное пороговое значение, и при обнаружении превышения заданной частоты вращения управляющее воздействие регулятора частоты вращения ограничивают предельным управляющим воздействием, убывающим во времени.
Это предельное управляющее воздействие может зависеть от заданного времени, спустя которое управляющее воздействие должно быть сведено к нулю.
В одном варианте осуществления изобретения градиент, с которым предельное управляющее воздействие убывает по времени, является постоянным. При этом градиент убывания можно определять путем деления максимального управляющего воздействия, характеризующего управляющее воздействие, максимально допустимое в нормальном режиме работы, на заданное время. В другом случае градиент убывания можно определять путем деления мгновенного предельного управляющего воздействия на заданное время.
В другом варианте осуществления изобретения предельное управляющее воздействие может убывать по времени согласно закону изменения градиента.
Далее, в случае превышения фактической частотой вращения двигателя внутреннего сгорания заданной частоты вращения менее чем на заданное пороговое значение управляющее воздействие регулятора частоты вращения может ограничиваться возрастающим во времени предельным управляющим воздействием, причем предельное управляющее воздействие возрастает до максимального управляющего воздействия, характеризующего управляющее воздействие, максимально допустимое в нормальном режиме работы.
В одном варианте осуществления изобретения при уменьшении фактической частоты вращения ниже заданной частоты вращения предельное управляющее воздействие может сразу устанавливаться равным максимальному управляющему воздействию, характеризующему управляющее воздействие, максимально допустимое в нормальном режиме работы.
Другим объектом изобретения является устройство управления двигателем внутреннего сгорания, содержащее регулятор для формирования управляющего воздействия в зависимости от заданной частоты вращения и фактической частоты вращения и ограничитель, предназначенный для обнаружения превышения заданной частоты вращения в случае, если фактическая частота вращения двигателя внутреннего сгорания превышает заданную частоту вращения более чем на заданное пороговое значение, и для ограничения управляющего воздействия регулятора частоты вращения предельным управляющим воздействием, убывающим во времени, в случае обнаружения превышения заданной частоты вращения.
Регулятор может содержать пропорциональную часть и интегральную часть, причем ограничитель ограничивает суммарное управляющее воздействие, сформированное пропорциональной частью и интегральной частью регулятора. В другом случае регулятор может содержать пропорциональную часть и интегральную часть, причем ограничитель связан с интегральной частью таким образом, чтобы при ограничении управляющего воздействия актуализировать в каждом цикле регулирования исходное значение интегрирования в интеграторе интегральной части подстановкой предельного значения интегрирования.
Краткое описание чертежей
Ниже подробнее рассматриваются предпочтительные варианты осуществления изобретения со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - структурная схема регулятора частоты вращения для системы управления двигателем в первом варианте осуществления изобретения,
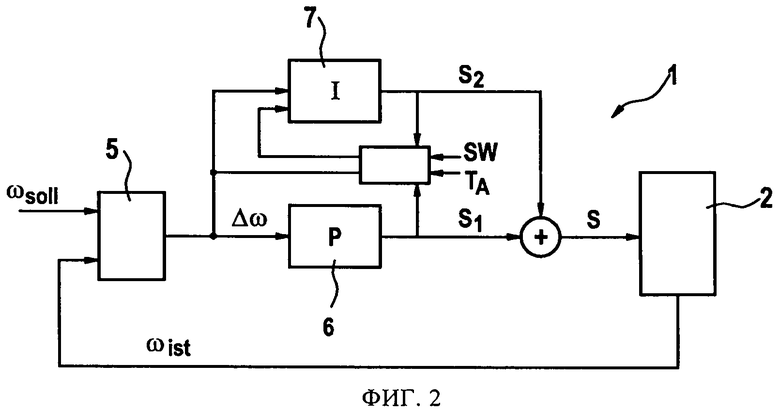
на фиг.2 - структурная схема регулятора частоты вращения для системы управления двигателем в другом варианте осуществления изобретения,
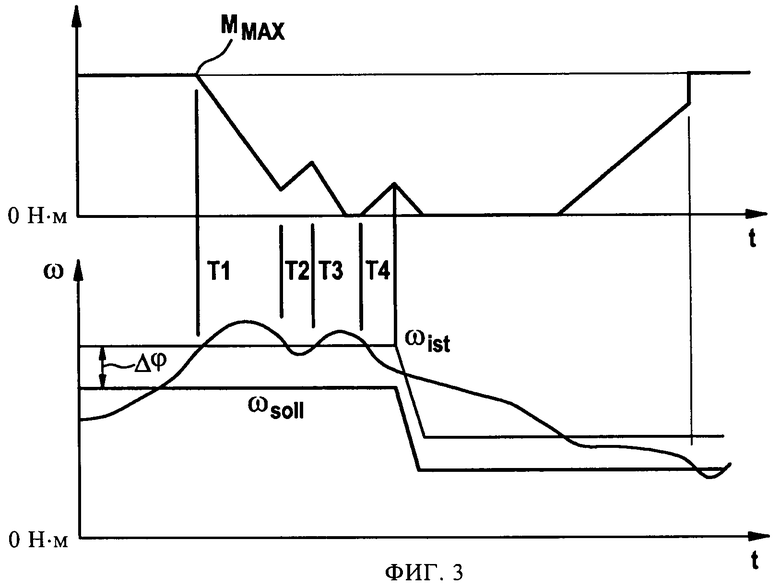
на фиг.3 - временная диаграмма, иллюстрирующая характер изменения максимального крутящего момента во времени в зависимости от фактической частоты вращения двигателя.
Осуществление изобретения
На фиг.1 схематично представлена двигательная система 1, включающая в себя двигатель 2 внутреннего сгорания и регулятор частоты вращения. Регулятор частоты вращения в рассматриваемом примере выполнен в виде пропорционально-интегрального регулятора и выдает в зависимости от разностной частоты вращения Δω управляющее воздействие S, например, в виде управляющего сигнала крутящего момента или впрыскиваемого количества топлива (цикловая подача). Регулятор частоты вращения содержит разностный элемент 5 для вычисления разностной частоты как разности между заданной частотой вращения ωsoll, формируемой вне регулятора (например, в виде сигнала желаемого крутящего момента от водителя транспортного средства), и определяемой в двигателе 2 внутреннего сгорания фактической частотой вращения ωist. Разностная частота вращения Δω подается в пропорциональное звено 6 (пропорциональную часть) и интегрирующее звено 7 (интегральную часть) регулятора. Пропорциональное звено 6 и интегрирующее звено 7 формируют соответственно составляющие S1 и S2 управляющего воздействия, которые суммируются в суммирующем звене 8 с получением управляющего воздействия S.
Кроме того, предусмотрено ограничительное звено 10, в которое подается сигнал разности Δω частот вращения и которое активизируется, как только разность Δω частот вращения станет больше порогового значения SW, жестко заданного. Если превышения порогового значения SW не произошло, управляющее воздействие S подается на двигатель 2 внутреннего сгорания без изменений. Если же разностная частота вращения Δω оказалась выше порогового значения SW, то управляющее воздействие S регулятора частоты вращения ограничивается предельным крутящим моментом Мmax.
Принцип работы ограничительного звена 10 описывается ниже со ссылкой на фиг.3. Для обеспечения того, что в подобном случае активизации ограничительного звена, т.е. случае превышения разностной частотой вращения Δω порогового значения, управляющее воздействие S на двигатель 2 внутреннего сгорания будут сведено к нулю в течение заданного времени, обозначенного промежутком времени ТА, предельный крутящий момент Мmax уменьшается по времени линейно или согласно заданному закону его изменения (см. момент времени Т1). Управляющее воздействие S, соответствующее крутящему моменту, оказавшемуся выше предельного крутящего момента Мmax, ограничивается предельным значением Мmax. Уменьшение предельного крутящего момента Мmax во времени производится до тех пор, пока либо Мmax не станет равно 0 Н·м, либо разностная частота вращения Δω не упадет ниже порогового значения (см. момент времени Т2).
Если Δω упадет ниже порогового значения (см. момент времени Т2) до того, как управляющее воздействие достигнет нуля, предельный крутящий момент Мmax начнет снова возрастать непрерывно по времени t от достигнутого к этому моменту предельного крутящего момента Mmax в направлении заданного максимального значения, но без превышения этого максимального значения. Если во время этого повышения предельного крутящего момента Mmax разностная частота Δω снова превысит пороговое значение (см. момент времени Т3), то предельный крутящий момент Мmax опять начнет убывать от достигнутого им значения линейно или по определенному закону изменения градиента до тех пор, пока либо он не станет равным 0 Н·м, либо значение Δω снова не опустится ниже порогового значения. Если значение Δω находится выше порогового значения SW, а предельный крутящий момент Mmax ужe стал равным 0 Н·м (см. период времени между моментами Т3 и Т4), предельный крутящий момент Mmax будет поддерживаться равным 0 Н·м и таким образом управляющее воздействие S будет ограничено нулевым крутящим моментом. Иначе говоря, управляющее воздействие регулятора частоты вращения на двигатель 2 внутреннего сгорания соответствует нулю, т.е. впрыск топлива в двигатель 2 внутреннего сгорания отсутствует. Как только разностная частота вращения Δω снова опустится ниже порогового значения SW (см. момент времени Т4), предельный крутящий момент Mmax опять начнет возрастать с определенным градиентом.
В случае если характеристика изменения предельного крутящего момента является линейной, как только разностная частота вращения Δω превысит пороговое значение SW, градиент убывания предельного крутящего момента Мmax будет определен на основании времени, за которое управляющее воздействие должно быть сведено к нулю при превышении разностной частотой вращения Δω порогового значения SW. Это время ТА может составлять, например, одну секунду. Градиент убывания предельного крутящего момента Mmax определяется, например, делением заданного максимального крутящего момента (соответствует крутящему моменту, максимально допустимому в нормальном режиме работы двигателя и представленному на верхнем графике фиг.3 сплошной тонкой горизонтальной линией) на вышеупомянутое заданное время, так что если предельный крутящий момент перед началом его убывания находился на уровне максимального крутящего момента, его значение станет равно 0 Н·м самое позднее к моменту истечения заданного времени ТА. В другом случае для вычисления градиента вместо максимального крутящего момента можно также использовать предельный крутящий момент Мmax. В случае повышения предельного крутящего момента Мmax, происходящего при уменьшении разностной частоты вращения ниже порогового значения, значение градиента такого повышения предпочтительно выбирать таким же (по модулю), как и для градиента на нисходящем наклонном отрезке характеристики изменения предельного крутящего момента Мmax в рассмотренном выше случае.
Как только фактическая частота вращения ωist станет меньше заданной частоты вращения ωsoll, предельный крутящий момент Мmax немедленно будет установлен равным максимальному крутящему моменту. Скачкообразного изменения крутящего момента при этом не происходит, поскольку составляющие S1 и S2 управляющего воздействия находятся значительно ниже максимального значения.
Для того чтобы иметь в распоряжении информацию о потребовавшемся срабатывании ограничителя 10, например, для ее анализа, значение ограничиваемого параметра при вмешательстве в управление ограничителя сохраняется в статическом запоминающем устройстве, обычно в уже имеющемся электрически-стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ). Это позволяет установить при опробовании двигателя, должно ли было сработать ограничение или же параметры регулирования обеспечивают регулирование частоты вращения с достаточным быстродействием для выполнения требования по времени снижения (сброса) управляющего воздействия.
На фиг.2 показан другой вариант выполнения предлагаемой в изобретении двигательной системы. При этом однотипные или функционально эквивалентные элементы обозначены теми же номерами позиций, что и на фиг.1. Вариант осуществления изобретения, показанный на фиг.2, отличается от показанного на фиг.1 варианта тем, что ограничитель предусмотрен не на пути прохождения сигналов между суммирующим звеном 8 и двигателем 2 внутреннего сгорания, а при интегрирующем звене 7. В показанном на фиг.2 варианте осуществления изобретения ограничитель 11, как и ограничитель 10 в показанном на фиг.1 варианте, получает разностную частоту вращения Δω, пороговое значение SW, а также заданное время ТА и по превышению порогового значения SW разностной частотой вращения Δω распознает необходимость ограничения предельного крутящего момента Мmax. Значение предельного крутящего момента Мmax, определяющее ограничиваемый параметр, определяют, как это описано выше применительно к варианту, показанному на фиг.1.
Из предельного крутящего момента Mmax в ограничителе 11 вычитается формируемая пропорциональным звеном 6 составляющая S1 управляющего воздействия, и тем самым определяется предельное значение интегрирования, посредством которого перед каждым циклом интегрирования актуализируется исходное значение интегрирования (значение, с которого в определенном цикле начинается процесс интегрирования) интегрирующего звена 7. Это значит, что если мгновенное значение интегрирования (значение на выходе интегратора по окончании интегрирования) будет больше выданного ограничителем 11 предельного значения интегрирования, то исходное значение интегрирования актуализируется подстановкой предельного значения интегрирования, выданного ограничителем 11. Если же значение интегрирования в интегрирующем звене 7 меньше выданного ограничителем 11 предельного значения интегрирования, актуализации не происходит.
Предлагаемый в изобретении способ имеет то преимущество, что спустя заданное время управляющее воздействие регулятора частоты вращения гарантированно достигнет нуля в любом случае. Для этого задается только одно время ТА, в пределах которого максимальный задаваемый регулятором исходный крутящий момент (управляющее воздействие) при слишком высокой частоте вращения линейно уменьшается от максимального крутящего момента до нейтрального значения (управляющее воздействие равно нулю). Это гарантирует, что даже при крайне медленных или неверно введенных параметрах регулятора включение встроенной функции контроля тяги, которая спустя определенное время, например одну секунду, проверит тягу на предмет возможного несоответствия впрыска командам, не приведет к ошибочной реакции. Тем самым исключается возможность непреднамеренного совершения пользователем действий, способных привести к подобным ошибкам, что позволяет оставить настройку регулятора полностью за пользователем и обойтись без дополнительных проверок системы управления в отношении контроля тяги.
Разумеется, в качестве регулятора частоты вращения также может быть предусмотрен ПИД-регулятор, причем дифференциальную составляющую управляющего воздействия не нужно ограничивать посредством ограничительного звена, а следует суммировать с уже, возможно, ограниченными пропорциональной и интегральной составляющими управляющего воздействия.
Изобретение может быть использовано в устройствах для контроля функционирования регулятора частоты вращения дизельного двигателя. Способ контроля функционирования регулятора частоты вращения двигателя (2) внутреннего сгорания заключается в том, что обнаруживают превышение заданной частоты вращения в случае, если фактическая частота вращения (ωist) двигателя внутреннего сгорания превышает заданную частоту вращения (ωsoll) более чем на заданное пороговое значение (SW). При обнаружении превышения заданной частоты вращения управляющее воздействие (S) регулятора частоты вращения ограничивают предельным управляющим воздействием (Мmах), убывающим во времени. Раскрыто устройство управления двигателем, реализующее заявленный способ. Технический результат заключается в гарантии того, что при слишком большом отклонении частоты вращения от заданной величины, управляющее воздействие регулятора уменьшится до нуля в пределах времени, в которое необходимо уложиться, без необходимости проверки в каждом конкретном случае параметров регулятора, установленных для конечного применения. 2 н. и 9 з.п. ф-лы, 3 ил.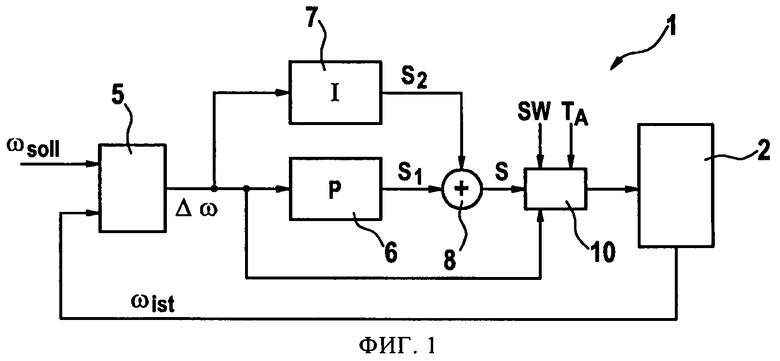
1. Способ контроля функционирования регулятора частоты вращения двигателя (2) внутреннего сгорания, характеризующийся тем, что
- обнаруживают превышение заданной частоты вращения в случае, если фактическая частота вращения (ωist) двигателя внутреннего сгорания превышает заданную частоту вращения (ωsoll) более чем на заданное пороговое значение (SW), и
- при обнаружении превышения заданной частоты вращения управляющее воздействие (S) регулятора частоты вращения ограничивают предельным управляющим воздействием (Мmах); убывающим во времени.
2. Способ по п.1, в котором предельное управляющее воздействие (Мmах) зависит от заданного времени, спустя которое управляющее воздействие (S) должно быть сведено к нулю.
3. Способ по п.2, в котором градиент, с которым предельное управляющее воздействие (Мmах) убывает по времени, является постоянным.
4. Способ по п.3, в котором градиент определяют путем деления максимального управляющего воздействия, характеризующего управляющее воздействие, максимально допустимое в нормальном режиме работы, на заданное время.
5. Способ по п.3, в котором градиент определяют путем деления мгновенного предельного управляющего воздействия (Мmах) на заданное время.
6. Способ по п.1 или 2, в котором предельное управляющее воздействие (Мmах) убывает по времени согласно закону изменения градиента.
7. Способ по п.1 или 2, в котором при превышении фактической частотой вращения (ωist) двигателя внутреннего сгорания заданной частоты вращения (ωsoll) менее чем на заданное пороговое значение управляющее воздействие регулятора частоты вращения ограничивают возрастающим во времени предельным управляющим воздействием (Мmах), причем предельное управляющее воздействие (Мmах) возрастает до максимального управляющего воздействия, характеризующего управляющее воздействие, максимально допустимое в нормальном режиме работы.
8. Способ по п.1 или 2, в котором при уменьшении фактической частоты вращения (ωist) ниже заданной частоты вращения (ωsoll) предельное управляющее воздействие (Мmах) сразу устанавливают равным максимальному управляющему воздействию, характеризующему управляющее воздействие, максимально допустимое в нормальном режиме работы.
9. Устройство управления двигателем (2) внутреннего сгорания, содержащее:
- регулятор (5, 6, 7) для формирования управляющего воздействия (S) в зависимости от заданной частоты вращения (ωsoll) и фактической частоты вращения (ωist) и
- ограничитель (10, 11), предназначенный для обнаружения превышения заданной частоты вращения в случае, если фактическая частота вращения (ωist) двигателя внутреннего сгорания превышает заданную частоту вращения (ωsoll) более чем на заданное пороговое значение (SW), и для ограничения управляющего воздействия (S) регулятора частоты вращения предельным управляющим воздействием (Мmах), убывающим во времени, в случае обнаружения превышения заданной частоты вращения.
10. Устройство управления двигателем по п.9, в котором регулятор содержит пропорциональную часть и интегральную часть, причем ограничитель (10) ограничивает суммарное управляющее воздействие, сформированное пропорциональной частью (6) и интегральной частью (7) регулятора.
11. Устройство управления двигателем по п.9, в котором регулятор содержит пропорциональную часть (6) и интегральную часть (7), причем ограничитель (11) связан с интегральной частью (7) таким образом, чтобы при ограничении управляющего воздействия актуализировать в каждом цикле регулирования исходное значение интегрирования в интеграторе интегральной части (7) подстановкой предельного значения интегрирования.
| DE 10302263 В3, 18.03.2004 | |||
| WO 03085248 A1, 16.10.2003 | |||
| DE 102005060540 В3, 26.04.2007 | |||
| WO 9002258 A1, 08.03.1990 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267630C2 |
| RU 22668381 C2, 20.01.2006 | |||
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2142567C1 |

