Область техники, к которой относится изобретение
Настоящее изобретение относится к электродинамическому тормозному устройству для универсального двигателя согласно пункту 1 формулы изобретения и к способу торможения универсального двигателя согласно пункту 15 формулы изобретения.
Уровень техники
Известны различные конфигурации электродинамических тормозных устройств.
В документе DE 3825835 А1 описано электрическое тормозное устройство для электродвигателя последовательного возбуждения, содержащего обмотку возбуждения и якорь, а также схему с системой импульсно-фазового управления, причем во время режима торможения обмотка возбуждения запитывается от сети, а якорь замкнут накоротко.
Указанное тормозное устройство предназначено для центрифуги, а поэтому тормозной крутящий момент должен поддерживаться постоянным во всем диапазоне частот вращения. Регулированием тормозного крутящего момента заведует управляющее устройство, основанное на подаче зависящего от частоты вращения напряжения, причем в обмотке возбуждения электродвигателя генерируется ток, обратно пропорциональный частоте вращения электродвигателя. Помимо этого, во время режима торможения последовательно с якорем еще включен резистор торможения.
В документе DE 10234397 А1 описан тормозной электродвигатель последовательного возбуждения и способ его торможения, согласно которым электродвигатель последовательного возбуждения в двигательном режиме работает как традиционный электродвигатель последовательного возбуждения, отличаясь тем, что в режиме торможения средства для переключения позволяют пропускать ток в обход якоря и обеспечить независимое возбуждение обмотки возбуждения напряжением питающей сети, так что при торможении двигатель может работать как генератор постоянного тока с независимым возбуждением.
Еще одно тормозное устройство раскрыто в документе DE 19932742 C1.
Раскрытие изобретения
В основу изобретения положена задача разработки улучшенного электродинамического тормозного устройства, охарактеризованного в пункте 1 формулы изобретения, и улучшенного способа торможения двигателя, прежде всего универсального двигателя, охарактеризованного в пункте 15 формулы изобретения.
Задача настоящего изобретения решается электродинамическим тормозным устройством, охарактеризованным в пункте 1 формулы изобретения, и способом, охарактеризованным в пункте 15 формулы изобретения. Преимущество предлагаемых в изобретении тормозного устройства и способа состоит в достижении улучшенного торможения якоря, при котором обеспечиваются щадящие условия для электрических контактных элементов.
Это достигается благодаря тому, что частота тока торможения в начальной фазе режима торможения выше, чем в следующей фазе режима торможения. Таким образом достигается щадящее и быстрое торможение якоря. Предпочтительно, чтобы в начальной фазе режима торможения обмотка возбуждения снабжалась переменным напряжением, имеющим частоту питающей электросети. В следующей за ней фазе обмотка возбуждения снабжается переменным напряжением, имеющим частоту, уменьшенную по сравнению с частотой подаваемого в начальной фазе переменного напряжения.
В зависимых пунктах формулы изобретения приведены предпочтительные дополнительные варианты выполнения электродинамического тормозного устройства и способа торможения.
Преимущества изобретения заключаются, среди прочего, в том, что плавное быстрое торможение универсального двигателя достигается с удовлетворительным сроком службы щеток без изменения полюсов обмотки возбуждения или якоря. Во время режима торможения якорь замыкается накоротко, а обмотка возбуждения путем специального управления во время режима торможения для получения возбуждения запитывается от сети, т.е. от питающей электросети. Плавное быстрое торможение достигается с помощью простой схемы и особого способа управления, что позволяет оптимизировать затраты на изготовление электродинамического тормозного устройства.
Кроме того, предлагаемое изобретение имеет то преимущество, что уменьшается искрение под щетками на коллекторе, в результате чего уменьшается или предотвращается вредное образование повышенной электрической дуги на коллекторе.
В варианте выполнения электродинамического тормозного устройства оно содержит приспособление, выполненное с возможностью снабжения обмотки возбуждения в следующей фазе пакетами полуволн, каждый из которых состоит из нескольких импульсов напряжения одинаковой, причем происходит чередование полярности импульсов напряжения от пакета к пакету полуволн. В результате простым образом достигается снабжение обмотки возбуждения переменным напряжением, имеющим частоту, меньшую частоты сети.
В еще одном варианте выполнения приспособление выполнено с возможностью приложения к обмотке возбуждения импульсов напряжения по меньшей мере первого пакета полуволн без ограничения по току. Таким образом достигается экономически выгодное исполнение электродинамического тормозного устройства.
В еще одном варианте выполнения приспособление выполнено с возможностью управления током импульсов напряжения пакетов полуволн в зависимости от заданных параметров. Таким образом достигается улучшенное торможение. В качестве параметра можно использовать, в частности, заданный ток, проходящий через обмотку возбуждения, и/или заданную частоту вращения двигателя.
В еще одном варианте выполнения приспособление выполнено с возможностью понижения тока импульсов напряжения в по меньшей мере одном пакете полуволн для следующих друг за другом во времени импульсов напряжения. Таким образом достигается быстрое торможение в конце режима торможения, при котором контакты якоря не подвергаются действию излишне сильной нагрузки.
В еще одном варианте выполнения приспособление выполнено с возможностью управления или регулирования тока, проходящего через обмотку возбуждения, в течение начальной фазы режима торможения на основании кривой заданных значений тока, в частности, с использованием кривой угла импульсно-фазового управления. Таким образом достигается точная адаптация тока к желательной кривой заданных значений тока. Регулирование тока путем воздействия на него с целью получения его заданных значений с помощью кривой угла импульсно-фазового управления представляет собой просто и экономично реализуемое решение.
В еще одном варианте выполнения приспособление выполнено с возможностью осуществления переключения из двигательного режима в режим торможения таким образом, чтобы во время переключения происходил переход переменного напряжения электросети через нуль, так что напряжение в первой полуволне режима торможения имеет полярность, противоположную полярности напряжения в последней полуволне двигательного режима. Таким образом дополнительно ограничивается износ контакт-деталей.
В еще одном варианте выполнения приспособление выполнено с возможностью поочередного изменения полярности первой полуволны для следующих друг за другом отрезков работы в режиме торможения. Эта мера также способствует уменьшению нагрузки щеток коллектора.
В еще одном варианте выполнения приспособление выполнено с возможностью задания в начальной фазе режима торможения по меньшей мере двух участков, на которых проходящий через обмотку возбуждения ток имеет различную величину. Таким образом достигается плавное торможение якоря.
В еще одном варианте выполнения приспособление выполнено с возможностью: регулирования проходящего через обмотку возбуждения тока на первом участке начальной фазы так, чтобы он слегка увеличивался с течением времени; регулирования проходящего через обмотку возбуждения тока на следующем, втором, участке начальной фазы так, чтобы он увеличивался с течением времени сильнее, чем на первом участке; регулирования проходящего через обмотку возбуждения тока на следующем, третьем, участке начальной фазы так, чтобы он увеличивался сильнее, чем на втором участке, для получения предпочтительно прямолинейно убывающей кривой частоты вращения якоря. Проведенные опыты показали, что с помощью такого подхода достигается плавное торможение двигателя.
В еще одном варианте выполнения для распознавания двигательного режима или режима торможения приспособление соединено с коммутационным элементом через предусмотренное для распознавания соединение. С помощью коммутационного элемента может быть установлено или прервано токопроводящее соединение между якорем и обмоткой возбуждения или якорем и/или обмоткой возбуждения и электросетью. С помощью предусмотренного для распознавания соединения предлагаемое приспособление может надежно распознавать двигательный режим или режим торможения.
В еще одном варианте выполнения приспособление имеет по меньшей мере один переключатель, в частности коммутационный элемент, с помощью которого может быть установлено или прервано токопроводящее соединение между выводами якоря и/или между якорем и обмоткой возбуждения, и/или между якорем и/или обмоткой возбуждения и выводами электросети, что сделано с целью переключения из двигательного режима в режим торможения, причем переключатели имеют задержку переключения на величину по меньшей мере одного полупериода переменного напряжения электросети. Таким образом можно осуществлять безопасное и надежное переключение между двигательным режимом и режимом торможения.
В еще одном варианте выполнения приспособление имеет электронный блок управления, который через предусмотренное для распознавания соединение во время двигательного режима посредством коммутационного элемента соединен напрямую с сетевым выводом или соединен с сетевым выводом через коммутационный элемент и обмотку возбуждения, причем после переключения из двигательного режима в режим торможения якорь посредством двух коммутационных элементов с обеих сторон отсоединяется от электросети, а после окончания режима торможения обмотка возбуждения отсоединяется от электросети еще одним (силовым) выключателем. Таким образом можно достичь безопасного и надежного переключения между двигательным режимом, режимом торможения и окончательным отсоединением двигателя от электросети.
В еще одном варианте выполнения для двустороннего механического отсоединения якоря предусмотрены три дополнительных выключателя, при этом первый выключатель во время двигательного режима подключен последовательно с универсальным двигателем через первый коммутационный элемент, второй выключатель во время режима торможения подключен последовательно с обмоткой возбуждения через второй коммутационный элемент, а третий выключатель подключен в перемычке короткого замыкания между выводами якоря.
Выключатели могут быть выполнены, например, в виде управляемых выключателей тока, таких как симисторы или управляемые выключатели иного типа. Включением выключателей управляет электронный блок управления.
Краткое описание чертежей
Далее приведено более подробное разъяснение изобретения со ссылками на прилагаемые чертежи, на которых показано:
на фиг.1-4 - компоновочные схемы электродинамического тормозного устройства для универсального двигателя;
на фиг.5-10 - символические графические изображения, диаграммы и записи характеристик тока и напряжения в обмотке возбуждения во время режима торможения;
на фиг.11-13 - другие компоновочные схемы тормозного устройства.
Осуществление изобретения
Торможение ручных электроинструментов, оснащенных представляющими опасность рабочими инструментами (органами), такие как ручные циркулярные пилы и угловые шлифовальные машины, до настоящего времени происходило с помощью механических тормозов или электронных тормозных устройств.
У механических тормозов имеется, в частности, недостаток, заключающийся в том, что такие тормоза подвержены довольно значительному износу, и таким образом, они нуждаются в техническом обслуживании, а в известных до сих пор электронных тормозных устройствах имеется существенный недостаток, состоящий в том, что щетки и коллектор обычно применяемого универсального двигателя во время режима торможения подвергаются сильному износу.
На фиг.1-4 показаны компоновочные схемы для универсального двигателя, с помощью которых обеспечена возможность осуществления независимого от сети торможения коротким замыканием, при котором щетки не подвергаются достойному упоминания износу.
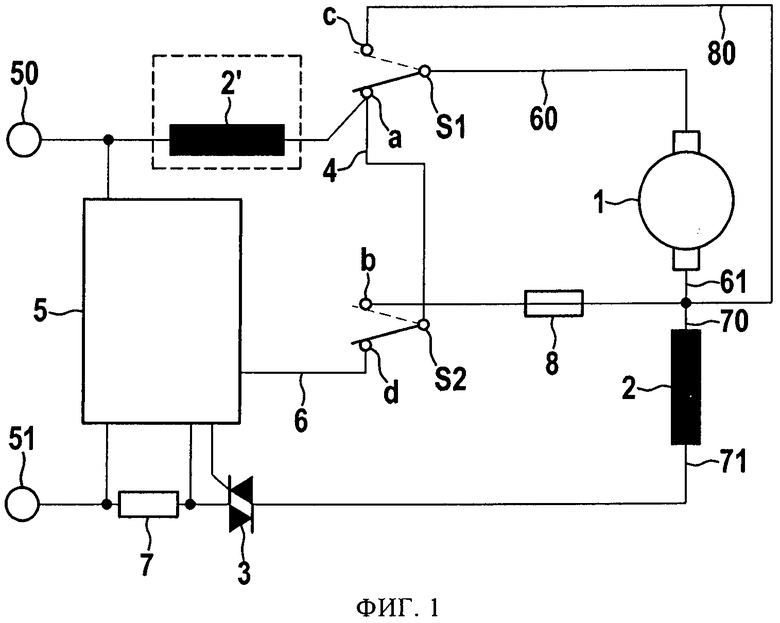
На фиг.1 показана схема, в которой первый сетевой вывод 50 электросети ведет к контакту а двигательного режима первого коммутационного элемента S1, первый вывод 60 якоря 1 соединен с первым коммутационным элементом S1, а второй вывод 61 якоря 1 соединен с первым выводом 70 обмотки 2 возбуждения, и между вторым выводом 71 обмотки возбуждения и вторым сетевым выводом 51 подключен выключатель в виде симистора 3. Второй вывод 61 якоря 1 и первый вывод 70 обмотки 2 возбуждения соединены с контактом b режима торможения второго коммутационного элемента S2 и с контактом с режима торможения первого коммутационного элемента S1, при этом второй коммутационный элемент S2 соединен через перемычку 4 с контактом а двигательного режима первого коммутационного элемента S1. Контакт с режима торможения через еще одну электрическую линию 80 соединен с линией соединения якоря 1 и обмотки 2 возбуждения. Контакт d распознавания второго коммутационного элемента S2 соединен с электронным блоком 5 управления посредством линии 6. Предпочтительным является то, что коммутационные элементы S1, S2, которые приводятся в действие, например, посредством выключателя или кнопок, обладают задержкой переключения на полупериод переменного напряжения электросети с тем, чтобы гарантировать безопасное переключение из двигательного режима в режим торможения.
В этом варианте якорь 1 с одной стороны включен последовательно с обмоткой 2 возбуждения. Также якорь может быть включен между двумя секциями обмотки возбуждения, причем в таком случае вторая часть 2' обмотки возбуждения соединена непосредственно с первым сетевым выводом 50.
Для регулируемого режима торможения предусмотрен шунт 7, расположенный между симистором 3 и вторым сетевым выводом, и на случай выхода из строя электронного приспособления во время режима торможения последовательно с обмоткой 2 возбуждения может быть включен предохранитель 8.
Показанная на фиг.1 схема также может быть снабжена только лишь вторым коммутационным элементом S2, причем тогда универсальный двигатель с одной стороны соединен непосредственно с сетью, и таким образом первый коммутационный элемент S1 не нужен. Тогда по соображениям обеспечения безопасности последовательно с универсальным двигателем включен предохранитель 8.
Принцип действия электродинамического тормозного устройства состоит в следующем. Если должен начаться двигательный режим, то выключатель прибора, соединенный с переключателями, приводится в действие таким образом, чтобы первый коммутационный элемент S3 примкнул к контакту а двигательного режима, а второй коммутационный элемент S2 примкнул к контакту d распознавания. При таком положении переключения коммутационных элементов универсальный двигатель вводится в работу в двигательном режиме и раскручивается до высоких оборотов, предпочтительно при помощи с использованием устройства плавного пуска, которым управляет электронный блок 5 управления через симистор 3. Электронный блок 5 управления имеет программу, например, для контроллера, с помощью которого происходит управление двигательным режимом и режимом торможения.
Если в результате приведения в действие выключателя прибора двигатель выключается, то первый коммутационный элемент S1 примыкает к контакту с режима торможения, а второй коммутационный элемент S2 примыкает к контакту b режима торможения. Теперь второй вывод 71 обмотки 2 возбуждения через симистор 3 соединен непосредственно со вторым сетевым выводом 51, а якорь 1 посредством контакта с режима торможения первого коммутационного элемента S1 и посредством линии 80 замыкается накоротко. Размыкание контакта d распознавания второго коммутационного элемента S2 распознается контроллером электронного блока 5 управления, и активируется программа для режима торможения, в соответствии с которой электронный блок 5 управления управляет симистором 3 таким образом, что через обмотку 2 возбуждения проходит ток заранее определенной величины. Вместо симистора также можно предусматривать управляемый выключатель другого типа. Благодаря тому, что к статору прикладывается поле, происходит соответствующее возбуждение вращающегося короткозамкнутого якоря 1. Обмотка 2 возбуждения таким образом посредством заложенной в электронный блок 5 управления программы нагружается напряжением, и при этом достигается малое искрение под щетками и обеспечивается эффективное торможение. Для этого электронный блок 5 управления имеет в распоряжении соответствующие промежутки времени для подачи напряжения. Напряжение вырабатывается из напряжения электросети 50, 51.
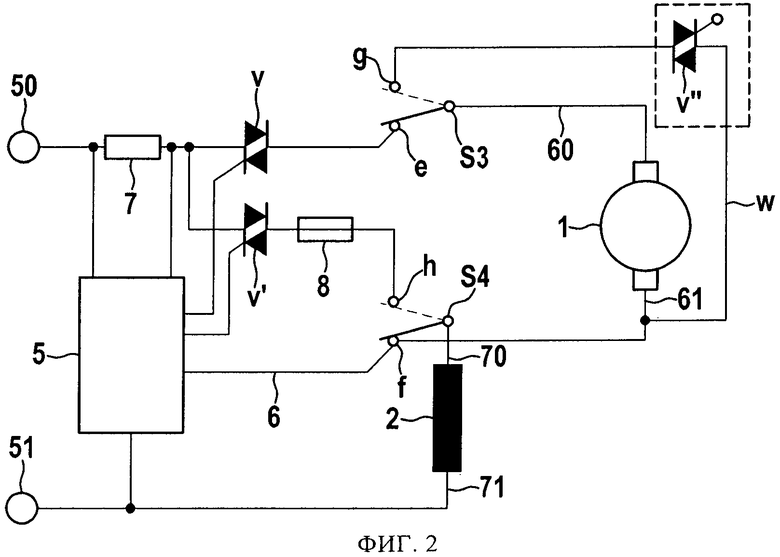
Если необходимо осуществлять безопасное переключение из двигательного режима в режим торможения с использованием выключателя прибора с помощью не имеющих задержки коммутационных элементов, и при этом якорь должен быть механически отсоединен от сети с обеих сторон, то для этого требуются три управляемых выключателя, например, симисторы.
Такое решение показано на фиг.2. Первый симистор v соединен с первым сетевым выводом 50 и с контактом е двигательного режима первого коммутационного элемента S3, первый вывод 60 якоря 1 ведет к первому коммутационному элементу S3, при этом второй вывод 61 якоря соединен с контактом f распознавания второго коммутационного элемента S4 и с контактом g режима торможения первого коммутационного элемента S3, причем контакт f распознавания также одновременно представляет собой контакт двигательного режима. Первый вывод 70 обмотки 2 возбуждения соединен со вторым коммутационным элементом S4, а второй вывод 71 обмотки возбуждения присоединен ко второму сетевому выводу 51, причем второй симистор v' соединен с контактом h режима торможения второго коммутационного элемента S4 и с первым сетевым выводом 50. Кроме того, второй вывод 61 якоря 1 через перемычку W и третий симистор v'' соединен с контактом g режима торможения первого коммутационного элемента S3. Электронный блок 5 управления линией 6 соединен с контактом f распознавания. Вместо трех симисторов также могут быть предусмотрены управляемые силовые выключатели иных типов. Тремя симисторами управляет электронный блок 5 управления.
С такой схемой якорь во время режима торможения и в положении выключения двигательного режима посредством коммутационных элементов S3, S4 с обеих сторон механически отсоединен от сети. Этим безопасное переключение из двигательного режима в режим торможения также не обеспечивается, поскольку последняя полуволна сетевого напряжения для двигательного режима может протекать через возникающую на контактах коммутационных элементов электрическую дугу и через перемычку W короткого замыкания якоря непосредственно через обмотку возбуждения, и таким образом первый симистор v вплоть до последнего перехода через нуль остается в проводящем состоянии (отперт), что служит причиной прохождения через обмотку возбуждения более сильного тока, который вызывает значительную электрическую дугу на коллекторе короткозамкнутого якоря, и этот сильный ток через обмотку возбуждения даже может привести к срабатыванию сетевого предохранителя. Электрическая дуга на контактах выключателя прибора гасится только при следующем переходе переменного напряжения через нуль.
Для предотвращения возможности прохождения во время переключения в режим торможения последней полуволны двигательного режима непосредственно через обмотку возбуждения предусмотрен третий симистор. Этот симистор v'' подключен в перемычке W короткого замыкания.
Из показанной на фиг.2 схемы наглядно видно, что после переключения из двигательного режима в режим торможения якорь 1 с обеих сторон отсоединен от сети посредством двух коммутационных элементов S3, S4, и после окончания режима торможения обмотка 2 возбуждения отсоединяется от сети посредством второго симистора v'. В двигательном режиме первый коммутационный элемент S3 соединен с контактом е двигательного режима, а второй коммутационный элемент S4 - с контактом f распознавания. В режиме торможения первый коммутационный элемент S3 соединен с контактом g режима торможения, а второй коммутационный элемент S4 - с еще одним контактом h режима торможения. Полное отсоединение якоря 1 от сети после переключения в режим торможения также может осуществляться, когда установлен только один симистор. Для этого требуется двухполюсный переключатель с коммутационными элементами, имеющими задержку на величину по меньшей мере одного полупериода переменного напряжения электросети, обеспечиваемого сетевыми выводами 50, 51.
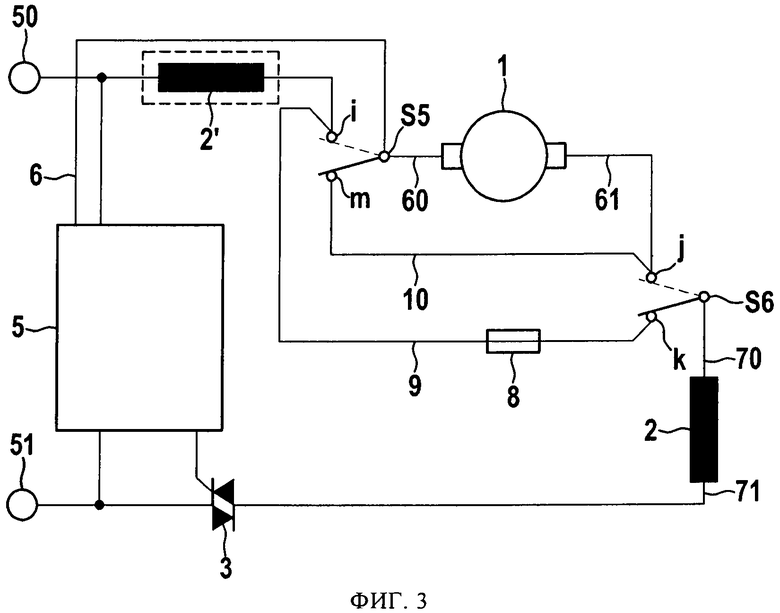
Такое решение показано на фиг.3. Первый сетевой вывод 50 ведет к контакту i двигательного режима первого коммутационного элемента S5, первый вывод 60 якоря 1 соединен с первым коммутационным элементом S5, при этом второй вывод 61 якоря 1 соединен с контактом j двигательного режима второго коммутационного элемента S6. Первый вывод 70 обмотки 2 возбуждения соединен со вторым коммутационным элементом S6. Второй вывод 71 обмотки возбуждения через симистор 3 ведет ко второму сетевому выводу 51. Контакт k режима торможения второго коммутационного элемента S6 соединен через перемычку 9 с контактом i двигательного режима первого коммутационного элемента S5, а контакт j двигательного режима второго коммутационного элемента S6 соединен через вторую перемычку 10 с контактом m режима торможения первого коммутационного элемента S5. Присоединительная линия 6 электронного блока 5 управления, предназначенная для распознавания положения переключателя, здесь присоединена к коммутационному элементу S5.
С одной стороны якорь 1 подключен последовательно с обмоткой 2 возбуждения или же он подключен между двумя обмотками возбуждения, и в таком случае вторая часть 2' обмотки возбуждения соединена непосредственно с первым сетевым выводом 50.
На фиг.3 обмотка возбуждения универсального двигателя в положении «ВЫКЛ» выключателя прибора, содержащего два коммутационных элемента S5, S6, отсоединена от сети только посредством одного симистора 3. Достичь большей безопасности работы позволяет ситуация, когда универсальный двигатель дополнительно также еще механически отсоединяется от сети. Для этого дополнительно может быть предусмотрен соответствующий выключатель.
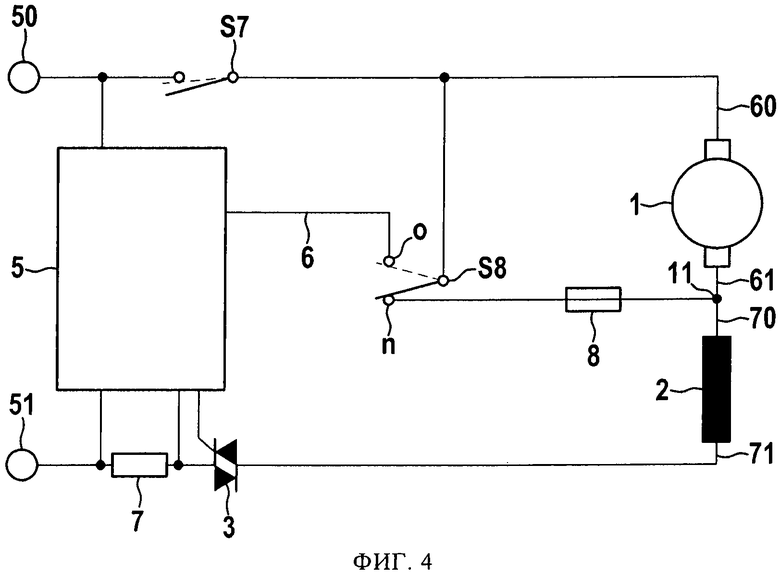
Такое решение показано на фиг.4. В этом случае после окончания режима торможения коммутационный элемент S7 отсоединяет первый сетевой вывод. Здесь якорь 1 с одной стороны подключен последовательно с обмоткой 2 возбуждения, и параллельно якорю 1 подключен коммутационный элемент S8, причем коммутационный элемент S8 и первый вывод 60 якоря 1 соединены с первым сетевым выводом 50, и контакт n режима торможения коммутационного элемента S8 соединен со вторым выводом 61 якоря 1 и с первым выводом 70 обмотки 2 возбуждения, и, таким образом, присоединен к отводу 11, причем контакт о распознавания коммутационного элемента S8 через линию 6 соединен с электронным блоком 5 управления. Симистор 3 расположен между вторым выводом 71 обмотки 2 возбуждения и вторым сетевым выводом 51, т.е. подключен после двигателя. Здесь для регулирования двигателя между симистором 3 и вторым сетевым выводом 51 также подключен шунт 7, с помощью которого можно регистрировать величину тока, проходящего через обмотку возбуждения. Для обеспечения безопасной работы во время режима торможения предусмотрен предохранитель 8, подключенный между первым выводом 70 обмотки 2 возбуждения и контактом n режима торможения.
Коммутационный элемент S8 и отсоединяющий от сети коммутационный элемент S7 приводятся в действие, например, выключателем прибора. Коммутационный элемент S8 имеет задержку переключения по меньшей мере на величину длительности одного полупериода переменного напряжения питания от сети. Отсоединяющий от сети коммутационный элемент S7 имеет задержку переключения, равную по меньшей мере продолжительности режима торможения, т.е. его контакты размыкаются только после окончания режима торможения. Отсоединяющий от сети коммутационный элемент S7 может переключаться также, например, электронным блоком 5 управления.
Для обеспечения возможности осуществления с помощью электродинамического тормозного устройства плавного быстрого торможения в универсальном двигателе, в котором во время режима торможения обмотка возбуждения присоединена к сети, а обмотка якоря замкнута накоротко, предусмотрена соответствующая программа для контроллера электронного блока управления, предназначенная для управления или регулирования тока через обмотку 2 возбуждения в режиме торможения при помощи одного или нескольких симисторов. Эта программа записана в запоминающее устройство, к которому может иметь доступ электронный блок управления. Регулирование тока, осуществляемое симистором, может быть реализовано методом импульсно-фазового управления и/или путем ограничения тока.
В таких тормозных устройствах необходимо учитывать, что за счет запитки обмотки 2 возбуждения переменным напряжением сети приложенное к статору поле не синхронизировано с полем, наведенным в якоре. Величина смещения зависит от многих факторов. Для компенсации временного смещения поля на якоре в цепь торможения подключают, например, тормозные резисторы. Однако тормозной резистор должен обеспечивать возможность управления им различным образом с тем, чтобы он полностью мог вступать в действие.
Однако в универсальном двигателе для электроинструментов это затратное решение в принципе неприменимо в силу отсутствия места, требуемого для размещения такого приспособления и высоких стоимостных факторов. В предлагаемом изобретении вопрос приблизительной синхронности полей статора и якоря решается посредством специального электронного блока управления. Далее приведено более подробное разъяснение этого способа, сделанное со ссылками на символические графические изображения, а также графики и записи сигналов.
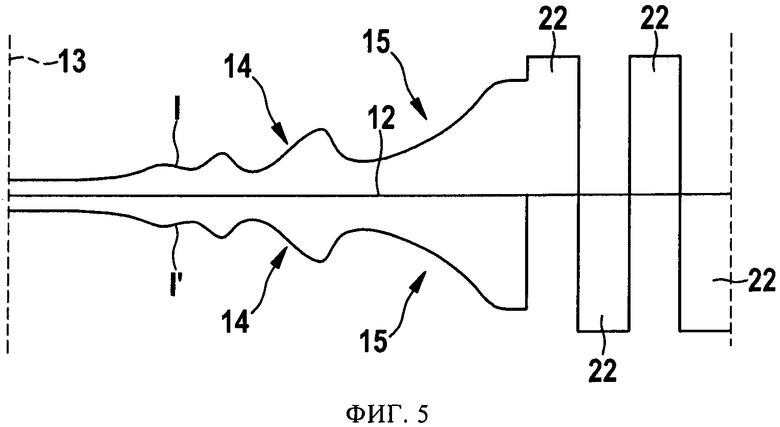
На фиг.5 показано символическое изображение кривых, иллюстрирующих прохождение тока в обмотке 2 возбуждения во время режима торможения при управлении симистором 3, или симисторами v, v', v'', осуществляемом с помощью системы импульсно-фазового управления и начинающимся при большом угле срабатывания, а в дальнейшем при меньшем, предпочтительно непрерывно и равномерно убывающем угле срабатывания. Для этого в запоминающем устройстве хранятся соответствующие таблицы управления. Переход переменного напряжения сети через нуль проиллюстрирован проходящей по всем участкам линией 12, а величины потребления тока обмоткой возбуждения во время режима торможения показаны по бокам от этой линии 12 с помощью других линий I, I'. Поскольку из сети подается переменный ток (соответственно, напряжение переменное), указаны положительные и отрицательные значения переменного тока.
В начале 13 режима торможения через обмотку возбуждения проходит меньший ток I, I' возбуждения, который затем слегка возрастает. На следующем, первом, участке 14 ток возбуждения волнообразно возрастает и спадает, а на последующем втором участке 15 ток I, I' возбуждения непрерывно возрастает. Для того чтобы в конце режима торможения осуществлялось плавное торможение и универсальный двигатель мог прийти в состояние полного останова, к концу режима торможения возбуждение обмотки возбуждения обеспечивается переменным током частоты, более низкой по сравнению с частотой сети, и этот переменный ток состоит из положительных и отрицательных пакетов 22 полуволн. Предпочтительно, чтобы частота пакетов полуволн была ниже 10 Гц.
Увеличение и уменьшение тока возбуждения в обмотке возбуждения служит причиной появления на коллекторе короткозамкнутого якоря значительного искрения под щетками, и запитка обмотки возбуждения пакетами полуволн или пульсирующим постоянным током в течение всего времени торможения является неблагоприятной из-за того, что при этом сильно изнашиваются щетки.
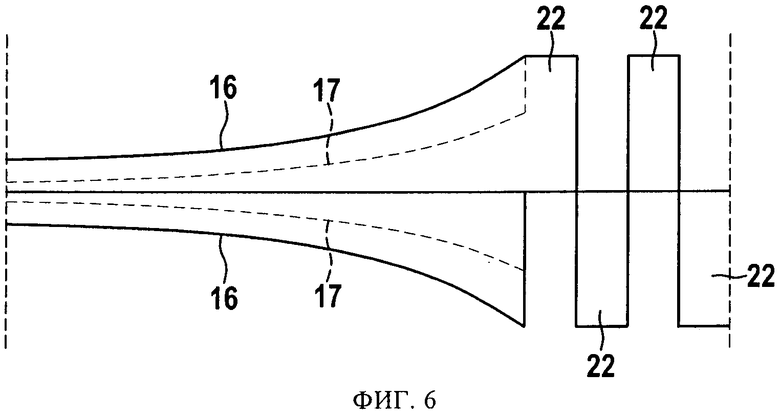
На фиг.6 показано с одной стороны в целом слишком высокое потребление 16 тока обмоткой возбуждения во время режима торможения, а с другой стороны - слишком низкое потребление 17 тока, проиллюстрированные токовыми кривыми 16 и токовыми кривыми 17 (показаны штриховыми линиями).
Для получения постоянно одной и той же токовой кривой во время режима торможения предусмотрено регулируемое потребление тока обмоткой возбуждения.
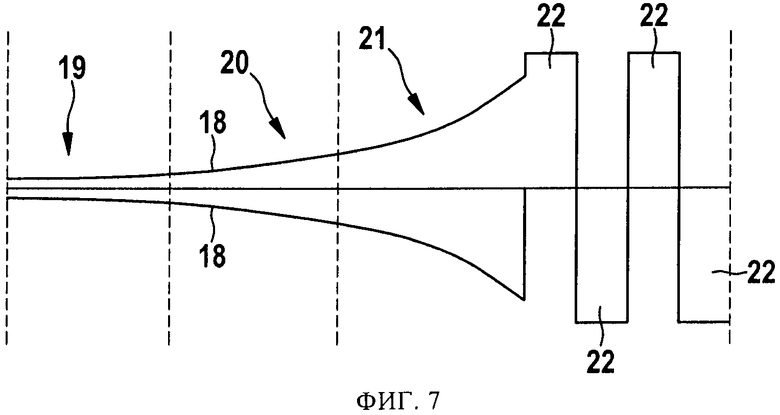
На фиг.7 показана такая полученная при регулировании кривая 18 для тока, проходящего во время режима торможения через обмотку 2, 2' возбуждения. В начале 13 режима торможения начинается потребление переменного тока обмоткой возбуждения с частотой сети и с жестко установленным низким значением тока, а в дальнейшем ходе режима торможения на участках 19, 20, 21 ток через обмотку 2 возбуждения предпочтительно непрерывно повышается вплоть до начала подачи пакетов 22 полуволн. Регулирование тока осуществляется посредством шунта 7 схемы, состояние элементов которой анализирует контроллер электронного блока 5 управления. С помощью программы контроллера происходит соответствующее управление одним или несколькими симисторами для обеспечения возможности прохождения через обмотку возбуждения тока нужной величины. С помощью шунта 7 также одновременно можно регулировать крутящий момент во время двигательного режима при понижении частоты вращения холостого хода универсального двигателя. Посредством шунта 7 также может хорошо определяться перегрузка универсального двигателя и блокирование электроинструмента. В таком случае электронный блок 5 управления производит соответствующий «откат» назад или полностью прерывает подачу тока к универсальному двигателю.
Для режима торможения для контроллера электронного блока 5 управления записана соответствующая программа и соответствующие данные, с помощью которых достигается плавное быстрое торможение при малом искрении под щетками.
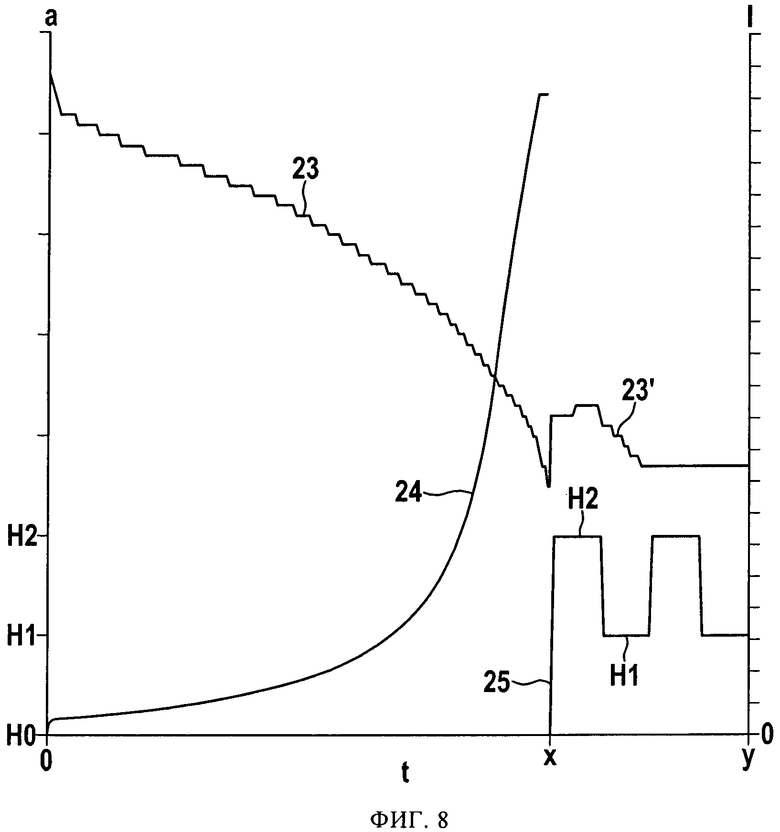
На фиг.8 показана схематическая диаграмма по времени t, где показаны кривые управления и используемые для регулирования данные, заложенные в программу контроллера электронного блока управления для режима торможения. Необходимые для построения кривой управления табличные данные для угла а импульсно-фазового управления режима торможения изображены в виде первой кривой 23 угла импульсно-фазового управления, а величины заданного значения I тока изображены с помощью кривой 24 заданных значений тока, причем кривая 23 угла импульсно-фазового управления выбрана таким образом, чтобы кривая 24 заданных значений тока была в принципе достижима. С помощью кривой угла импульсно-фазового управления задаются фазовые углы а, при которых один или несколько симисторов срезают переменное напряжение питающей сети для получения требуемого характера напряжения и, особенно, тока в обмотке возбуждения. Отклонения от кривой 24 заданных значений тока корректируются регулятором тока, который задает величину тока, управляющего одним или несколькими симисторами в режиме торможения через обмотку возбуждения. В соответствующим образом сконструированном универсальном двигателе можно отказаться от задания кривой заданных значений тока, и в этом случае во время режима торможения задают только кривую 23 угла импульсно-фазового управления. Кривая 24 заданных значений тока также может быть достигнута без кривой 23 угла импульсно-фазового управления с помощью регулятора тока, путем задания в начале кривой 24 заданных значений тока на регуляторе тока угла импульсно-фазового управления. Регулятор тока встроен в электронный блок 5 управления и активен во время режима торможения в интервале времени от 0 до момента времени, соответствующего Н0, при этом обмотка 2, 2' возбуждения нагружается переменным током с частотой, соответствующей частоте сети. Регулятор тока может быть выполнен в виде программы или схемы. Кроме того, регулятор тока может служить для корректировки отклонений от кривой заданных значений тока, обусловленных смещением поля якоря от поля статора и реактивным током двигателя. Начиная с момента времени Х и до момента времени Y действует управление путем подачи полуволн, и обмотка возбуждения нагружается переменным током более низкой частоты, чем частота питающей сети, в соответствии с пакетами Н2 и H1 полуволн, изображенными кривой 25 управления подачей полуволн. Здесь пакеты полуволн в отношении тока не регулируются, но при этом они также могут быть регулируемыми по величине тока. Первая кривая 25 управления подачей полуволн задается второй кривой 23' угла импульсно-фазового управления. Первые пакеты Н2 полуволн могут быть положительными, и в таком случае вторые пакеты H1 полуволн - отрицательные, или же первые пакеты Н2 полуволн могут быть отрицательными, и тогда вторые пакеты H1 полуволн - положительные.
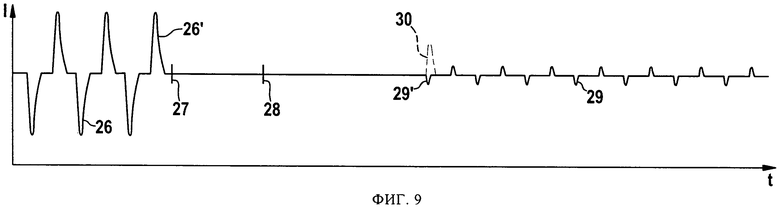
На фиг.9 показана записанная характеристика тока I, проходящего через обмотку возбуждения, в зависимости от времени t, где изображены срезанные полные волны сигнала напряжения сети во время перехода из двигательного режима в режим торможения. Режим холостого хода универсального двигателя проиллюстрирован срезанными полными волнами 26 сети. На отметке 27 происходит переключение из двигательного режима в режим торможения, и коммутационные элементы S1, S2; S3, S4; S5, S6; S8 выключателя прибора отведены от контактов двигательного режима. На отметке 28 коммутационные элементы выключателя прибора прилегают с образованием замыкания к контактам режима торможения. Таким образом, здесь коммутационные элементы имеют задержку переключения величиной примерно в четыре полупериода частоты сети. В зависимости от выбранного исполнения задержка переключения может быть короче или длиннее.
В пределах задержки переключения коммутационного элемента контроллер электронного блока управления производит переключение из двигательного режима в режим торможения. После примерно шести полупериодов частоты сети программа торможения с помощью по меньшей мере одного симистора 3, v, v', v'' с большим срезом полуволн 29', 29 переменного напряжения сети начинает снабжение обмотки возбуждения переменным напряжением, причем программа торможения также может начинаться и раньше. Программа контроллера разработана так, чтобы предпочтительно первая полуволна 29' переменного напряжения, подаваемого к обмотке возбуждения для режима торможения, имела полярность, противоположную полярности последней полуволны 26' переменного напряжения, подаваемого на обмотку возбуждения для двигательного режима. Если двигательный режим заканчивается положительной полуволной, то предпочтительно, чтобы режим торможения начинался с отрицательной полуволны. Если двигательный режим заканчивается отрицательной полуволной, то предпочтительно, чтобы режим торможения начинался с положительной полуволны. Это чередование полуволн является предпочтительным, поскольку при одинаковой полярности полуволн во время смены режимов работы путем перехода из двигательного режима в режим торможения соответствующий первой полуволне 29' ток, проходящий через обмотку 2, 2' возбуждения, в начале режима торможения может быть весьма высоким, что проиллюстрировано показанной штриховой линией полуволной 30, что приводит к появлению значительной электрической дуги на коллекторе якоря.
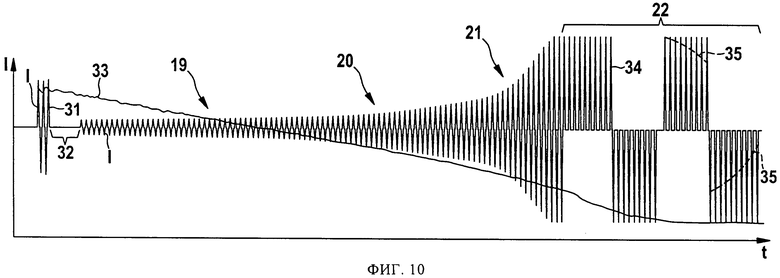
На фиг.10 показана записанная характеристика тока I, проходящего через обмотку 2 возбуждения во время работы универсального двигателя в режиме торможения. Запитка током производится от сети переменного напряжения, и соответственно ток представляет собой переменный ток. Режим холостого хода изображен записанным током I, соответствующим срезанным полным волнам 31 сетевого напряжения. Между переключением из двигательного режима в режим торможения находится по меньшей мере один переход сетевого напряжения через нуль. После интервала времени 32, в который происходит переключение из двигательного режима в режим торможения, потребляемый в обмотке 2, 2' возбуждения ток I вначале предпочтительно мал, при этом ток I сети в дальнейшем ходе работы на первом участке 19 предпочтительно только слегка непрерывно возрастает, на втором участке 20 предпочтительно возрастает несколько сильнее, а на третьем участке 21 предпочтительно круто возрастает, и в результате этого кривая 33 частоты вращения имеет примерно прямолинейно убывающий характер, в результате чего частота вращения универсального двигателя во время режима торможения предпочтительно непрерывно и равномерно понижается. При этом потребление тока в обмотке возбуждения носит прогрессирующий характер. В зависимости от выбранного исполнения также могут быть выбраны другие токовые характеристики и кривые частоты вращения.
На четвертом участке 22 происходит потребление переменного тока в обмотке возбуждения с более низкой частотой, причем к обмотке возбуждения прикладываются положительные и отрицательные пакеты полуволн переменного напряжения питающей сети. Пакет полуволн включает несколько положительных или отрицательных импульсов напряжения с положительным или отрицательным током. Импульсы напряжения получаются, т.е. отфильтровываются, из переменного напряжения сети за счет соответствующего управления по меньшей мере одним симистором 3. Частота чередования полярности запитки обмотки возбуждения пакетами полуволн может быть равна, например, половине частоты сети и менее, например, вплоть до одной десятой частоты сети. В течение периода времени, соответствующего подаче пакета полуволн, к обмотке возбуждения прикладываются несколько импульсов напряжения одинаковой полярности, поступающих из сети. После этого, во время подачи следующего пакета полуволн, к обмотке возбуждения прикладывается определенное число импульсов напряжения противоположной полярности, поступающих из сети. При этом в пакет полуволн могут укладываться, например, 2-10 и более импульсов напряжения одинаковой полярности. Частота 33 вращения универсального двигателя во время режима торможения непрерывно убывает, предпочтительно равномерно, вплоть до пакетов 22 полуволн. Благодаря подаче пакетов полуволн частота вращения понижается сильнее, и двигатель быстро приходит к полному останову. Предпочтительно, чтобы при новом включении универсального двигателя происходило изменение порядка следования полярностей пакетов полуволн, за счет того, что, например, первый пакет 34 полуволн при одном торможении универсального двигателя содержит положительные полуволны, а при следующем за ним торможении универсального двигателя содержит отрицательные полуволны. За счет этого достигается равномерный износ щеток коллектора якоря.
Поскольку в зависимости от свойств универсального двигателя к концу времени торможения индуктивное поле на якоре может быть больше наведенного поля, к концу времени торможения якорь универсального двигателя может приводиться в действие под влиянием приложенного к обмотке возбуждения поля. Поэтому может быть целесообразно снижать к концу времени торможения потребление тока обмоткой возбуждения, предпочтительно снижать сильно. Снижение тока проиллюстрировано штриховой линией 35. Снижение потребления тока может длиться на протяжении также одного, двух или более последних пакетов полуволн. В еще одном варианте выполнения можно реализовать преждевременное выключение сети.
Для еще большего уменьшения износа щеток в затормаживаемом универсальном двигателе можно снижать частоту вращения холостого хода в области номинального режима универсального двигателя, причем тогда универсальный двигатель связан со средствами для регистрации частоты вращения. Снижение частоты вращения холостого хода особенно предпочтительно в случае угловой шлифовальной машины или ручной циркулярной пилы, поскольку при этом облегчается безопасное начальное внедрение рабочего инструмента в обрабатываемую заготовку. Как только рабочий инструмент нагружается, дальнейшее регулирование крутящего момента происходит в соответствии с нагрузкой на рабочий инструмент.
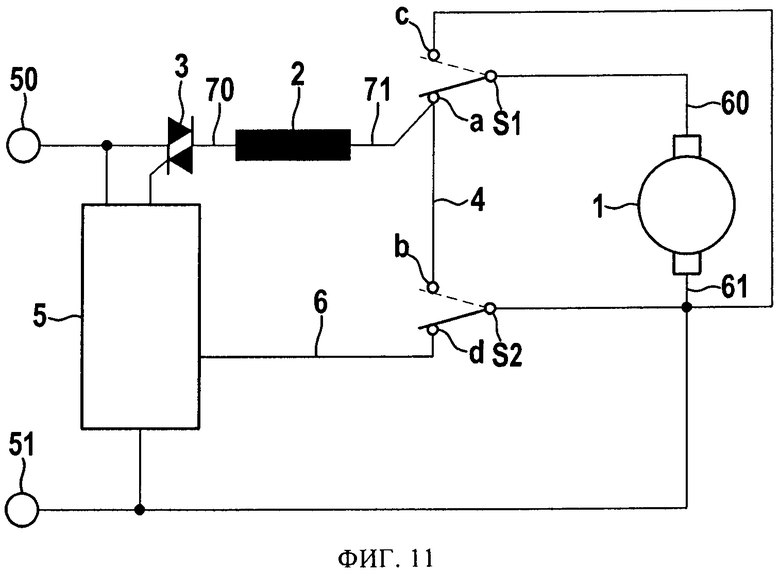
На фиг.11 показан еще один вариант выполнения компоновочной схемы, в котором симистор 3 соединен с первым сетевым выводом 50 и с первым выводом 70 обмотки 2 возбуждения, второй вывод 71 обмотки 2 возбуждения ведет к контакту а двигательного режима первого коммутационного элемента S1, а первый вывод 60 якоря 1 ведет к первому коммутационному элементу S1, при этом контакт b режима торможения второго коммутационного элемента S2 посредством перемычки 4 соединен с контактом а двигательного режима первого коммутационного элемента S1. Симистор 3 связан с электронным блоком 5 управления. Для того чтобы электронный блок 5 управления мог распознавать, когда посредством коммутационных элементов S1, S2 включен двигательный режим или режим торможения, от контакта распознавания d второго коммутационного элемента S2 к электронному блоку 5 управления проложена линия 6. Кроме того, контакт с режима торможения первого коммутационного элемента S1 соединен со вторым выводом 61 якоря 1. Второй вывод 61 якоря 1 присоединен ко второму сетевому выводу 51.
В показанной на фиг.11 схеме симистор 3 подключен перед универсальным двигателем. Также симистор 3 может быть подключен после универсального двигателя.
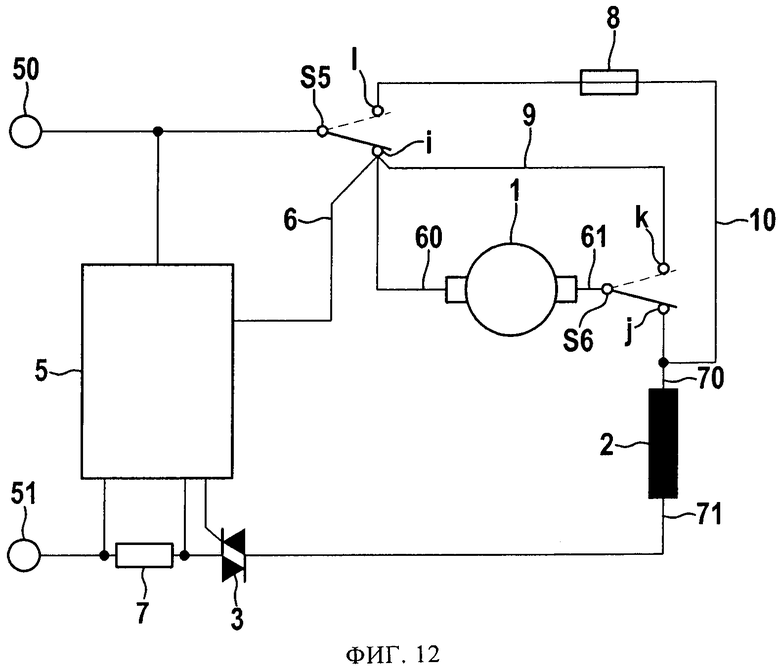
На фиг.12 показан еще один вариант выполнения схемы. Первый сетевой вывод 50 ведет к первому коммутационному элементу S5, первый вывод 60 якоря 1 соединен с контактом i двигательного режима первого коммутационного элемента S5, при этом второй вывод 61 якоря 1 соединен со вторым коммутационным элементом S6, первый вывод 70 обмотки 2 возбуждения соединен с контактом j двигательного режима второго коммутационного элемента S6, а второй вывод 71 обмотки 2 возбуждения через симистор 3 ведет ко второму сетевому выводу 51. Контакт k режима торможения второго коммутационного элемента S6 посредством перемычки 9 соединен с контактом i двигательного режима первого коммутационного элемента S5, а контакт j двигательного режима второго коммутационного элемента S6 посредством перемычки 10 соединен с контактом 1 режима торможения первого коммутационного элемента S5. Здесь контакт i двигательного режима первого коммутационного элемента S5 также одновременно является контактом распознавания, к которому присоединена линия 6 электронного блока 5 управления, служащая для распознавания положения переключателя.
На фиг.13 показан еще один вариант схемы. Часть 2' обмотки возбуждения соединена с первым сетевым выводом 50, а другая часть 2 обмотки возбуждения соединена через симистор 3 со вторым сетевым выводом 51. Параллельно якорю 1 подключен коммутационный элемент S3, при этом контакт е режима торможения присоединен к первому выводу 60 якоря 1, а коммутационный элемент S3 присоединен ко второму выводу 61 якоря 1.
Для распознавания двигательного режима и режима торможения электронный блок 5 управления связан с коммутационным элементом S4, который соединен непосредственно с первым сетевым выводом 50. Изображенные на схеме коммутационные элементы приводятся в действие синхронно.
В показанной на фиг.13 схеме при выходе из строя симистора 3 двигательный режим не может быть отключен, и если во время режима торможения последовательно с обмоткой возбуждения включен предохранитель, то он перегорает.
Механическое отключение двигательного режима также возможно при включенном последовательно с обмоткой возбуждения предохранителе, если для этого якорь 1 связать с коммутационным элементом S5. Тогда часть 2' обмотки возбуждения присоединена к контакту f двигательного режима коммутационного элемента S5, и этот контакт f двигательного режима коммутационного элемента S5 через перемычку соединен с контактом е режима торможения коммутационного элемента S3, причем коммутационный элемент S5 присоединен к первому выводу 60 якоря 1, а контакт g режима торможения коммутационного элемента S5 присоединен ко второму выводу 61 якоря 1.
В схемах, показанных на фиг.1-4 и на фиг.11-13, электронный блок 5 управления соединен с симисторами 3, v, v', v''. Электронный блок 5 управления регулирует ток посредством симисторов согласно записанным таблицам и/или диаграммам. Управление симисторами может осуществляться, например, в зависимости от времени и/или в зависимости от частоты вращения якоря, и/или в зависимости от величины тока, проходящего через обмотку возбуждения в режиме торможения. Симистор представляет собой управляемый выключатель.
В еще одном варианте выполнения якорь 1 после переключения в режим торможения отсоединяется от сети с обеих сторон путем переключения соответствующих коммутационных элементов.
В еще одном варианте выполнения как кривая управления, применяемая для построения кривой 26 угла импульсно-фазового управления, так и необходимые для регулирования данные заданных значений тока кривой 27 заданных значений тока, формируются с помощью таблиц или математических функций программы контроллера.
В еще одном варианте выполнения после переключения в режим торможения потребление тока в обмотке 2 возбуждения меньше, чем потребление тока при работе двигателя с частотой вращения холостого хода.
В еще одном варианте выполнения временная задержка для начала программы торможения, обеспечиваемая электронным блоком 5 управления, превышает задержку коммутационных элементов.
В еще одном варианте выполнения изобретение относится к электродинамическому тормозному устройству для универсального двигателя, имеющего обмотку 2 возбуждения и якорь 3, а также схему, содержащую по меньшей мере один из следующих признаков: по меньшей мере один симистор 1; электронный блок 5 управления с контроллером; выключатель прибора с коммутационными элементами для переключения из двигательного режима в режим торможения, причем во время режима торможения обмотка 2 возбуждения запитывается от сети, а якорь 3 замкнут накоротко, и контроллер содержит программу для управления двигательным режимом и режимом торможения, разработанную для уменьшения искрения под щетками во время режима торможения таким образом, что
- при конструктивном исполнении выключателя прибора с не имеющими задержки коммутационными элементами S3, S4 для надежного распознавания положения выключателя указанная схема содержит еще один симистор 1', причем первый симистор 1 предназначен для двигательного режима, а второй симистор 1' - для режима торможения,
- после переключения в режим торможения и, таким образом, перехода выключателя прибора в выключенное положение, якорь 3 замыкается накоротко посредством не имеющих задержки коммутационных элементов S3, S4, и посредством этих коммутационных элементов S3, S4 якорь с обеих сторон отсоединяется от питающей сети,
- после переключения в режим торможения активируется программа торможения, записанная в контроллере, имеющемся в электронном блоке 5 управления, в соответствии с которой происходит управление вторым симистором 1',
- во время режима торможения обмотка 2 возбуждения возбуждается через второй симистор 1', а после окончания программы торможения обмотка 2 возбуждения отсоединяется от сети вторым симистором 1'.
В еще одном варианте выполнения во время режима торможения посредством шунта 7 определяется истинное значение тока, состоящее из активного тока и реактивного тока двигателя, нужное для функционирования регулятора тока электронного блока 5 управления, а кривая 27 заданных значений тока получается посредством регулятора тока с помощью кривой 26 угла импульсно-фазового управления, или же кривую 27 заданных значений тока получают непосредственно с помощью регулятора тока, путем задания регулятору тока угла импульсно-фазового управления в начале режима торможения.
Изобретение относится к электродинамическому тормозному устройству и способу торможения универсального двигателя, имеющего обмотку возбуждения и якорь. Технический результат заключается в улучшении торможения якоря, при котором обеспечиваются щадящие условия для электрических контактных элементов. Универсальный двигатель выполнен с возможностью переключения из двигательного режима в режим торможения, причем во время двигательного режима якорь и обмотка возбуждения снабжаются переменным током от питающей электросети, а во время режима торможения якорь замыкается накоротко и в дальнейшем обмотка возбуждения снабжается переменным напряжением от электросети. В первой фазе режима торможения обмотка возбуждения может снабжаться переменным током с напряжением, имеющим частоту электросети, а в следующей фазе режима торможения обмотка возбуждения может снабжаться переменным током с напряжением, имеющим частоту, уменьшенную по сравнению с частотой электросети. 2 н. и 22 з.п. ф-лы, 13 ил.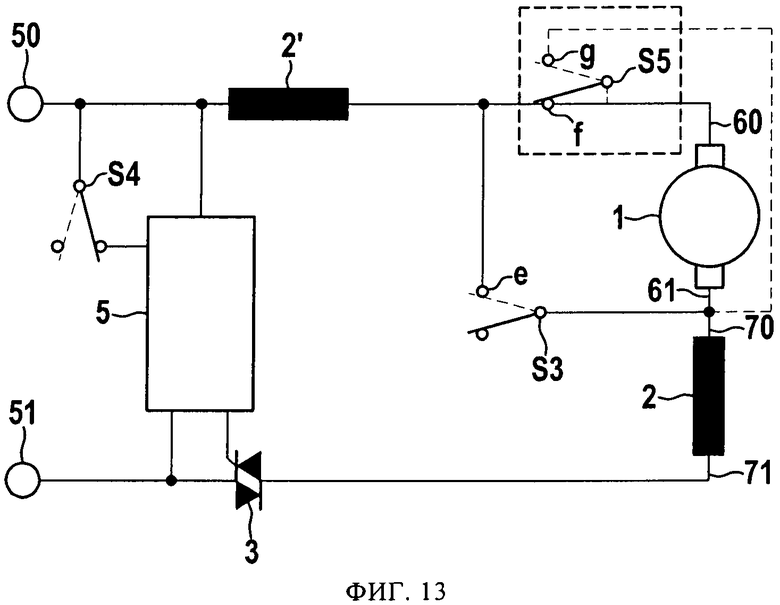
1. Электродинамическое тормозное устройство для универсального двигателя, имеющего обмотку (2, 2') возбуждения и якорь (1), содержащее приспособление (S1-S6, S8, 3, v, v', v'') для переключения из двигательного режима в режим торможения, выполненное с возможностью снабжения переменным током якоря (1) и обмотки (2, 2') возбуждения во время двигательного режима от сети (50, 51), причем
- приспособление выполнено с возможностью замыкания накоротко якоря (1) во время режима торможения и снабжения в дальнейшем обмотки (2, 2') возбуждения переменным напряжением от сети (50, 51),
- приспособление выполнено с возможностью снабжения в первой фазе, в частности в начальной фазе режима торможения, обмотки (2, 2') возбуждения переменным током с напряжением, имеющим частоту сети, и
- приспособление выполнено с возможностью снабжения в следующей фазе режима торможения, в частности после начальной фазы, обмотки (2, 2') возбуждения от электросети переменным напряжением, имеющим частоту, уменьшенную по сравнению с частотой питающей сети.
2. Тормозное устройство по п.1, в котором приспособление выполнено с возможностью снабжения обмотки возбуждения в следующей фазе пакетами полуволн, каждый из которых состоит из нескольких импульсов напряжения одинаковой полярности, поступающими от сети, причем происходит чередование полярности импульсов напряжения от пакета к пакету полуволн.
3. Тормозное устройство по п.2, в котором приспособление выполнено с возможностью приложения от сети к обмотке возбуждения импульсов напряжения по меньшей мере первого пакета полуволн без ограничения по току.
4. Тормозное устройство по п.2, в котором приспособление выполнено с возможностью управления током импульсов напряжения пакетов полуволн в зависимости от заданных параметров.
5. Тормозное устройство по п.4, в котором приспособление выполнено с возможностью понижения тока импульсов напряжения в по меньшей мере одном пакете полуволн для следующих друг за другом во времени импульсов напряжения.
6. Тормозное устройство по одному из пп.1-4, в котором приспособление выполнено с возможностью управления или регулирования тока, проходящего через обмотку возбуждения, в течение начальной фазы режима торможения на основании кривой заданных значений тока, в частности, с использованием кривой угла импульсно-фазового управления.
7. Тормозное устройство по одному из пп.1-4, в котором приспособление выполнено с возможностью осуществления переключения из двигательного режима в режим торможения таким образом, чтобы происходил переход переменного напряжения электросети через нуль, так что напряжение в первой полуволне режима торможения имеет полярность, противоположную полярности напряжения в последней полуволне двигательного режима.
8. Тормозное устройство по одному из пп.1-4, в котором приспособление выполнено с возможностью поочередного изменения полярности первой полуволны для следующих друг за другом отрезков работы в режиме торможения.
9. Тормозное устройство по одному из пп.1-4, в котором приспособление выполнено с возможностью задания в начальной фазе режима торможения по меньшей мере двух участков, на которых проходящий через обмотку возбуждения ток имеет различную величину.
10. Тормозное устройство по п.9, в котором приспособление выполнено с возможностью: регулирования проходящего через обмотку возбуждения тока на первом участке начальной фазы так, чтобы он слегка увеличивался с течением времени; регулирования проходящего через обмотку возбуждения тока на следующем, втором, участке начальной фазы так, чтобы он увеличивался с течением времени сильнее, чем на первом участке; регулирования проходящего через обмотку возбуждения тока на следующем, третьем, участке начальной фазы так, чтобы он увеличивался сильнее, чем на втором участке начальной фазы, для получения предпочтительно прямолинейно убывающей кривой частоты вращения якоря.
11. Тормозное устройство по одному из пп.1-4, в котором приспособление имеет соединение (6), предназначенное для распознавания двигательного режима или режима торможения, идущее к коммутационному элементу (S1, S2, S3, S4, S5, S8), причем с помощью коммутационного элемента (S1, S2, S3, S4, S5, S8) может быть установлено или прервано токопроводящее соединение между якорем (1) и обмоткой (2) возбуждения или якорем (1) и/или обмоткой (2) возбуждения и сетью (50, 51).
12. Тормозное устройство по одному из пп.1-4, в котором приспособление имеет по меньшей мере один переключатель, в частности коммутационный элемент (S1), с помощью которого может быть установлено или прервано токопроводящее соединение между выводами якоря (1) и/или между якорем (1) и обмоткой (2) возбуждения, и/или между якорем (1) и/или обмоткой (2) возбуждения и выводами сети (50, 51), с целью переключения из двигательного режима в режим торможения, причем переключатели (S1-S8) имеют задержку переключения на величину по меньшей мере одного полупериода переменного напряжения сети.
13. Тормозное устройство по одному из пп.1-4, в котором приспособление имеет электронный блок (5) управления, который через предусмотренное для распознавания соединение (6) во время двигательного режима через коммутационный элемент (S1-S6, S8) соединен напрямую с сетевым выводом (50) или через коммутационный элемент (S1-S6, S8) и обмотку (2) возбуждения соединен с сетевым выводом (51), причем после переключения из двигательного режима в режим торможения якорь (1) посредством двух коммутационных элементов (S1, S2; S3, S4) с обеих сторон отсоединяется от сети (50, 51), и при этом после окончания режима торможения обмотка (2) возбуждения отсоединяется от электросети выключателем (3).
14. Тормозное устройство по одному из пп.1-4, в котором для двустороннего механического отсоединения якоря с помощью не имеющих задержки коммутационных элементов (S3, S4) предусмотрены три дополнительных выключателя (v, v', v''), причем первый выключатель (v) во время двигательного режима подключен последовательно с универсальным двигателем (1, 2) через первый коммутационный элемент (S3), второй выключатель (v') во время режима торможения подключен последовательно с обмоткой (2) возбуждения через второй коммутационный элемент (S4), а третий выключатель (v'') подключен в перемычке (W) короткого замыкания между выводами (60, 61) якоря (1).
15. Способ торможения универсального двигателя, имеющего обмотку возбуждения и якорь, выполненного с возможностью переключения из двигательного режима в режим торможения, характеризующийся тем, что:
- во время двигательного режима якорь и обмотку возбуждения снабжают переменным током от электросети,
- во время режима торможения якорь замыкают накоротко и в дальнейшем снабжают обмотку возбуждения переменным напряжением от электросети,
- в начальной фазе режима торможения обмотку возбуждения снабжают переменным напряжением, имеющим частоту электросети, и
- после начальной фазы режима торможения в следующей фазе режима торможения обмотку возбуждения снабжают от электросети переменным напряжением, имеющим частоту, уменьшенную по сравнению с частотой электросети.
16. Способ по п.15, в котором в следующей фазе обмотку возбуждения снабжают пакетами полуволн, каждый из которых состоит из нескольких импульсов напряжения одинаковой полярности, поступающими от сети, причем происходит чередование полярности импульсов напряжения от пакета к пакету полуволн.
17. Способ по п.16, в котором импульсы напряжения по меньшей мере первого пакета полуволн прикладывают к обмотке возбуждения без ограничения по току.
18. Способ по п.16, в котором током импульсов напряжения пакета полуволн управляют или регулируют его в зависимости от заданных параметров.
19. Способ по п.18, в котором ток импульса напряжения в по меньшей мере одном пакете полуволн понижают для следующих друг за другом во времени импульсов напряжения.
20. Способ по одному из пп.15-19, в котором проходящим через обмотку возбуждения током управляют или регулируют его в течение начальной фазы режима торможения на основании кривой заданных значений тока, в частности, с использованием кривой угла импульсно-фазового управления.
21. Способ по одному из пп.15-19, в котором переключение из двигательного режима в режим торможения осуществляют таким образом, чтобы между сменой двигательного режима режимом торможения происходил переход переменного напряжения электросети через нуль, так что напряжение в первой полуволне режима торможения имеет полярность, противоположную полярности напряжения в последней полуволне двигательного режима.
22. Способ по одному из пп.15-19, в котором поочередно изменяют полярность первой полуволны режима торможения для следующих друг за другом отрезков работы в режиме торможения.
23. Способ по одному из пп.15-19, в котором в начальной фазе режима торможения задают по меньшей мере два участка, на которых проходящий через обмотку возбуждения ток имеет различную величину.
24. Способ по п.23, в котором на первом участке начальной фазы регулируют проходящий через обмотку возбуждения ток таким образом, чтобы он слегка увеличивался с течением времени, на следующем, втором, участке начальной фазы регулируют проходящий через обмотку возбуждения ток таким образом, чтобы он увеличивался с течением времени сильнее, чем на первом участке, и на следующем, третьем, участке начальной фазы регулируют проходящий через обмотку возбуждения ток таким образом, чтобы он увеличивался сильнее, чем на втором участке, для получения предпочтительно прямолинейно убывающей кривой частоты вращения якоря.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2168259C1 |
| Устройство для предотвращения буксования электрических тяговых двигателей | 1934 |
|
SU42141A1 |
| Сосуд для разложения щелочных и щелочноземельных амальгам | 1929 |
|
SU23384A1 |
| Приспособление, заменяющее рычаги, водящие цепь, обнимающую шестерню с заключенной в ней конфетой в конфетно-заверточной машине | 1929 |
|
SU21652A1 |
| US 6236173 B1, 22.05.2001 | |||
| Фазовращатель | 1985 |
|
SU1385261A1 |

