Изобретение относится к классу цифровых синхронных одноканальных систем управления (ЦСУ), построенных по принципу фазового управления, с арккосисинусоидальной зависимостью между фазой управляющих импульсов и сигналом управления, и предназначено для использования в трехфазных управляемых мостовых выпрямителях (ТУМВ) с микропроцессорной системой управления, широким диапазоном регулирования углов управления силовых вентилей, включая и условия искажения питающего напряжения.
Известен большой класс цифровых систем управления, которые объединяет реализация цифровыми методами принципа фазового управления. Все системы включают устройство синхронизации с сетью, фазосдвигающее устройство, устройство распределения и формирования управляющих импульсов. Большинство ЦСУ построены по "вертикальному" принципу и имеют буферный регистр для кода управляющего сигнала, генератор импульсов со стабильной частотой, счетчик, текущий код которого соответствует коду управления, и узел сравнения кодов (цифровой компаратор), фиксирующий момент сравнения текущего значения кода со счетчика с кодом управления [1]. Применение микропроцессоров (МП) позволяет использовать тот же "вертикальный" принцип управления, при этом появляются дополнительные возможности по использованию программной реализации пропорционально-интегральной передаточной функции фазосдвигающего устройства, с использованием считывания данных и перевода их в цифровую форму [2, 3, 4]. Ряд устройств используют микропроцессор для измерения временных интервалов между синхроимпульсами или между импульсами управления [5, 6]. Синхронизация ЦСУ в условиях искажения питающего напряжения может осуществляться от независимого источника, синхронизация с сетью с помощью замкнутой системы фазовой подстройки частоты (ФАПЧ) [7, 8, с. 174], с помощью нескольких каналов синхронизации [9].
В наиболее близком к изобретению решении [4] на микропроцессор возложен контроль выходного напряжения, определение чередования фаз и частоты напряжения источника питания, определение последовательности подачи отпирающих импульсов управления и их синхронизация. Величина угла управления определяется как момент пересечения пилы, формируемой микропроцессором, с уставкой. При изменении выходного напряжения сигнал рассогласования переводится из аналоговой в цифровую (двоичную) форму, амплитуда пилы изменяется в соответствии с рассчитанным воздействием от изменения выходного напряжения. Наклон пилы изменяется в зависимости от изменения частоты. Частота определяется через измеренный интервал между синхроимпульсами.
Недостатки прототипа следующие: не учитывается при определении значения угла управления изменение величины входного напряжения и тока, что ведет к ухудшению динамических характеристик преобразователя. Ухудшают динамические характеристики преобразователя и заранее жестко заданные параметры пилы. Кроме того, положение угла можно определить только после пересечения пилы и уставки, при этом значение угла (в градусах электрических) не определяется. Значение угла требуется как информация (исходные данные) для средства контроля и автоматики, а также для выбора режимов или способа синхронизации системы управления. Кроме того, в прототипе не реализована гибкая обратная связь по току (или напряжению), необходимая для реализации режимов стабилизации и токоограничения.
Цель изобретения - улучшение динамических характеристик преобразователя на базе ЦСУ с использованием микропроцессора, расширение возможностей ЦСУ для реализации дополнительных средств контроля и автоматики, а также использование разнообразных способов синхронизации системы управления, в том числе и в условиях искажения питающего напряжения.
Цель достигается путем параметрического расчета угла управления преобразователем и получения его численного значения с помощью формулы (из выражения его регулировочной характеристики) по значению уставки, по мгновенным значениям входных и выходных параметров преобразователя, других дополнительных параметров, принимаемых в расчет при окончательном определении численного значения угла управления. К таким дополнительным параметрам относятся инерционные звенья в системе цифрового регулирования, величина фазового сдвига синхронизирующего напряжения относительно питающего напряжения. При этом получаем прогнозируемое значение угла управления еще до фактического появления соответствующего импульса.
Основные этапы реализации предложенного способа:
ввод значения уставок (выходной ток, напряжение, угол коммутации и величина фазового сдвига синхронизирующего напряжения относительно питающего, если необходимо);
считывание и перевод мгновенных значений аналоговых сигналов с датчиков (тока и напряжения на входе и выходе преобразователя) в цифровую форму;
расчет угла управления (в значениях град.эл.) по формуле регулировочной характеристики преобразователя и таблице перевода значения тригонометрической функции (cos) в градусы;
корректировка угла управления с учетом сигнала обратной связи и угла фазового сдвига синхронизирующего напряжения относительно питающего;
вычисление с помощью таймера периода питающего напряжения и расчет временного интервала, приходящегося на единицу электрического градуса;
перевод значения угла управления из град.эл. во временную область;
определение момента появления синхроимпульса (СИ);
определение номера, первого после СИ, управляющего импульса;
с помощью таймера отсчет временного интервала, соответствующего значению угла управления во временной области, и выдача сигнала, по окончании отсчета, на формирование импульса управления определенной длительности;
повторение расчетов угла управления и определение положения следующего импульса управления;
с появлением очередного СИ осуществляется временная коррекция всех расчетов.
На фиг. 1 представлена структурная схема, иллюстрирующая последовательность получения временного значения угла управления преобразователем;
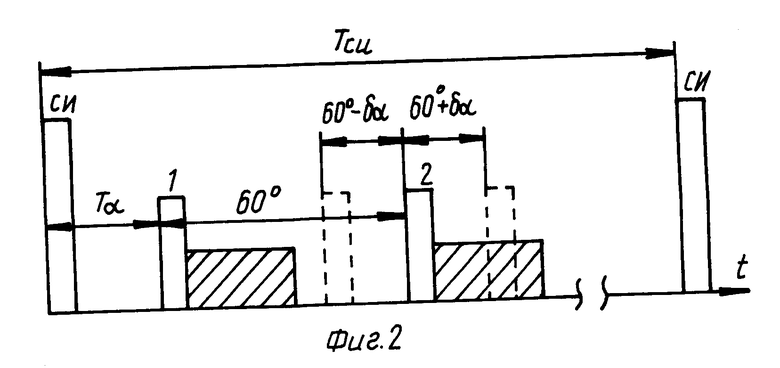
на фиг. 2 - диаграмма, поясняющая принцип формирования чередования импульсов управления на интервале между синхроимпульсами;
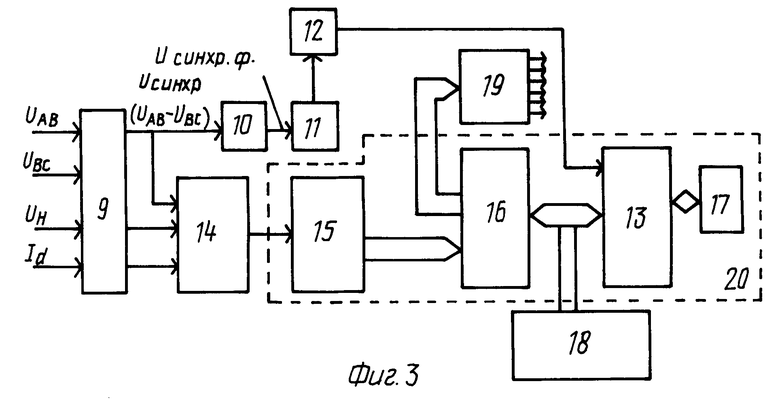
на фиг. 3 - структура построения ЦСУ;
на фиг. 4 - диаграммы напряжений, поясняющих один из способов синхронизации.
Схема (фиг. 1), иллюстрирующая предлагаемый способ определения моментов подачи управляющих импульсов на вентили преобразователя, содержит блок 1 параметрического расчета угла управления, сумматор 2, на входы которого подаются соответственно уставка по выходному напряжению и его текущее значение. Выход сумматора 2 связан с входом блока инерционного звена 3. Выход последнего соединен с входом сумматора 4, второй вход которого связан с выходом блока 1. Вход блока памяти 5 соединен с выходом сумматора 4, а его выход связан с входом блока вычисления 6, выход которого соединен с входом блока 7 преобразования угла во временное значение. Аналогичный блок 7 подключен к выходу сумматора 4. Выход блока 7 подключен к одному из входов сумматора 8, на второй вход которого подается значение фазового угла между синхронизирующим напряжением и напряжением питания.
В основу определения величины угла управления преобразователем положено сочетание параметрического способа, при котором величина угла управления зависит от величин выходного и входного напряжений, выходного тока ТУМВ и интегральной (или интегрально-дифференциально-пропорциональной) составляющей, вызванной работой контура регулирования (обратная связь по току или напряжению).
Параметрическое значение угла управления в общем виде определяется из выражения регулировочной характеристики выпрямителя
Uн= Kсх•Uл.вх•cosα-IdRэ, (1)
где
Rэ - эквивалентное сопротивление, обусловленное реактансом контура коммутации;
Uн - выходное напряжение преобразователя;
Id - выходной ток преобразователя;
Uл.вх - линейное напряжение на входе преобразователя;
α - угол управления преобразователем;
Kсх - коэффициент схемы для мостового выпрямителя.
Выражение (1) справедливо и для мгновенных значений, которые могут быть взяты в любой фазе входного или выходного напряжения (тока) с последующим приведением их с помощью поправочных коэффициентов к значениям расчетных величин. Фаза считывания может быть связана с положением СИ.
Параметрическая составляющая угла управления вычисляется блоком 1 по формуле
где
ТАВ - табличное представление функции arccos; Uну - заданное напряжение уставки.
Предложенный алгоритм вычисления параметрической составляющей угла управления позволяет учесть изменение напряжения на входе преобразователя и компенсировать падение напряжения на выходе преобразователя от протекания тока нагрузки.
Контур регулирования реализован на интегральном законе, и интегральная составляющая угла управления определяется в блоке 3
где
Kт - коэффициент передачи.
Суммарное значение параметрической и интегральной составляющих угла управления на выходе сумматора 4 дает нам окончательное значение угла управления
α = α1+ α2.
Выражения (2), (3), (4) положены в основу реализации режима стабилизации напряжения, выражение (3) реализует режим стабилизации тока при замене напряжения на ток (в том числе и режим токоограничения при к.з. в нагрузке).
Процесс перехода от расчетных значений во временную область происходит следующим образом. В момент поступления синхроимпульса (СИ) на вход прерывания МП включается внутренний таймер, который работает до поступления очередного СИ. Зная тактовую частоту МП, число циклов МП на запись информации в таймер, число, записанное в таймер, вычисляется интервал времени между синхроимпульсами Tси (фактически измеряется период питающего напряжения)
ϕ ,
где
F0 - тактовая частота МП Гц;
NТА - число циклов МП на запись информации в таймер;
N - число в кодах, считанное из таймера.
Разделив Tси на шесть, интервал между импульсами, в реальном масштабе времени.
Одновременно в блоке 7' происходит пересчет вычисленного угла управления во временную область
60°± δα, (8) .
Выражение (5) позволяет фактически измерить период питающего напряжения, тем самым учитывается изменение частоты питающего напряжения, а временной сдвиг импульсов управления, эквивалентный расчетному значению угла управления, учитывается выражением (6). Таким образом, обеспечивается расчетное значение угла управления тиристорами преобразователя при отклонениях частоты питающего напряжения.
Выражение (6) справедливо для случая, когда положение СИ совпадает с моментом естественной коммутации тиристоров. Если СИ сдвинуты относительно момента естественной коммутации тиристоров, то в выражение (6) необходимо ввести поправку на величину этого сдвига, что осуществляется сумматором 8
δα = αc-αн, (9) ,
где
αc - расчетное значение угла управления в реальном масштабе времени, посчитанное по формуле (6);
αн - фазовый сдвиг СИ относительно момента естественной коммутации тиристоров.
Полученное на выходе сумматора 4 значение угла управления запоминается в блоке памяти 5 и используется для вычисления в блоке 6 положения последующего угла управления. Для этого после появления очередного импульса управления, примерно на интервале 30 град.эл. блоком 6 проводится расчет текущего значения угла управления (количество расчетов определяется возможностями МП). В зависимости от вычисленного значения угла управления определяется положение следующего (после очередного) импульса. Его положение можно определить как ,
,
где
Tα=(TСИ•α)/360. (6) ,
Tα=Tα(6)±ϕ, (7) - запомненное старое значение угла управления;
Tα(6) - новое значение угла управления.
Процесс формирования импульсов управления на периоде между СИ показан на фиг. 2. Здесь цифрами обозначена очередность появления управляющих импульсов, пунктиром показано положение очередного импульса управления при изменении угла управления, заштрихованная область обозначает временной интервал для расчетов угла управления.
Фиг. 3 представляет вариант структуры построения ЦСУ с микропроцессором, реализующей предлагаемый способ управления.
На входы блока датчиков 9 поступают входные линейные напряжения Uав, Uвс (или любая другая комбинация из двух линейных напряжений), выходное напряжение Uн и ток Id, где они преобразуются в необходимые уровни сигналов, а из двух входных линейных напряжений формируется напряжение (Uав-Uвс), являющиеся первичным синхронизирующим напряжением Uсинхр и напряжением, эквивалентным Uл.вх. Напряжение Uсинхр поступает на фильтр 10, компаратор 11, одновибратор 12. Выход одновибратора 12 поступает на вход прерывания микропроцессора 13. Сигналы с блока датчиков 9 поступают на мультиплексор (МПС) 14, выход которого поступает на аналого-цифровой преобразователь (АЦП) 15. Коды с АЦП 15, через параллельный интерфейс (ПИ) 16, поступают на МП 13, где происходит обработка данных. МП 13 связан с блоком памяти 17 (включающим в себя постоянные запоминающие устройства ПЗУ и оперативные запоминающие устройства ОЗУ) и блоком управления и автоматики 18. Импульсы управления, рассчитанные и сформированные МП 13, через ПИ 16 поступают на схему формирования импульсов (ФИ) 19. В связи с появлением новых однокристальных микросхем, которые включают в себя МП, АЦП, ПИ, блок памяти 17 и другие элементы, на фиг. 3 пунктиром обозначен блок 20, который обозначает однокристальную микросхему с расширенными возможностями.
Схема работает следующим образом. Сигналы с блока датчиков 9 поступают на МПС 14, который производит поочередное подключение входных сигналов на вход АЦП 15. Сигналы из аналоговой формы переводятся в цифровые коды и подаются в МП 13 через ПИ 16, назначение которого осуществлять буферную связь с внешними устройствами МП 13. МП 13 осуществляет расчетные операции по формулам с (2) по (9) и формирует импульсы управления, которые через ПИ 16 поступают на схему ФИ 19.
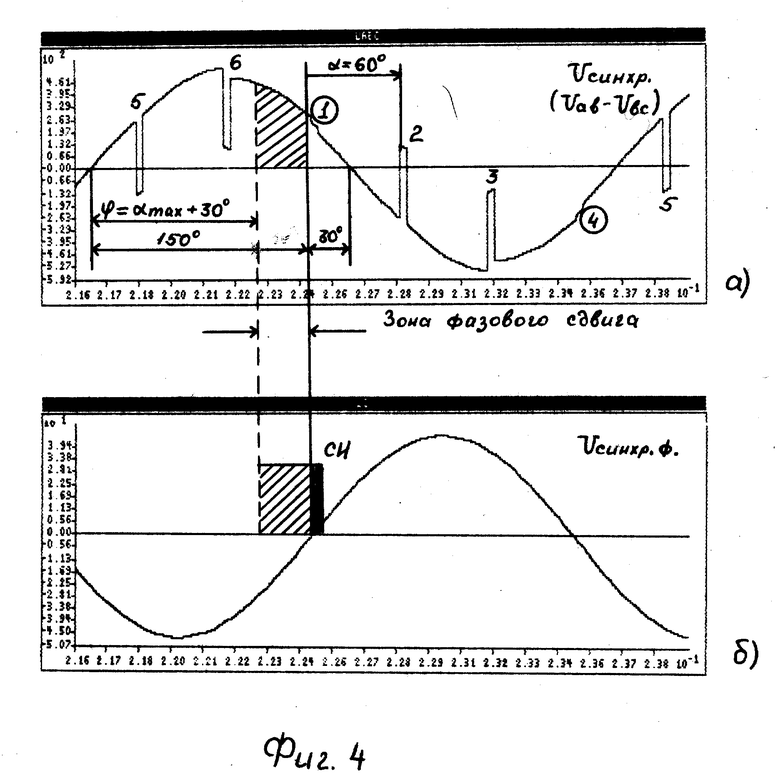
Как было сказано выше, на вход прерывания МП 13 подаются СИ от схемы синхронизации. Схема синхронизации образуется из блока датчиков 9, фильтра 10, компаратора 11, одновибратора 12 (фиг. 3). Схема синхронизации обеспечивает формирование СИ одновибратором 12 в момент перехода синхронизирующего напряжения Uсинхр.ф через нуль, которое фиксируется компаратором 11. Далее рассматривается один из возможных вариантов получения и использования синхронизирующего напряжения.
Синхронизирующее напряжение получается из первичного синхронизирующего напряжения на входе преобразователя с помощью фильтра 10. Синхронизирующее напряжение должно иметь точку перехода через нуль в момент отсутствия коммутационного провала в кривой первичного синхронизирующего напряжения (обусловленных работой как самого преобразователя, так и параллельно работающих) при широком диапазоне изменения угла регулирования. Для этого первичное синхронизирующего напряжения Uсинхр формируется как разность двух линейных напряжений на входе преобразователя (например Uав, Uвс)
Uсинхр = Uав - Uвс.
За счет этого в полученном напряжении исключаются коммутационные провалы от включения пары тиристоров, относящихся к одной фазе, независимо от угла управления, что является важным условием при работе на сеть нескольких преобразователей (фиг. 4,а). Таким образом, на полученном первичном синхронизирующем напряжении имеется зона, свободная от коммутационных провалов (от включения 1-го и 4-го тиристоров), которую можно использовать для получения мгновенных значений входного питающего напряжения (Uл.вх) и использования их для вычислений по формуле (2).
Формирование СИ производят в момент перехода напряжения Uсинх.ф через нуль (например с - на +). Значение фазового сдвига можно вычислить с помощью МП как разницу момента перехода через нуль напряжения Uсинхр и Uсинхр.ф. Положение первого после СИ управляющего импульса корректируется в соответствии с выражением
TαH=Tα+δϕ, (11)
где
δϕ = 150°-ϕ. (12)
При αmin≤ TαH<60° (13)
формируется второй импульс управления,
при 60°≤TαH≤αmax (14)
формируется первый импульс управления,
где
ϕ - фазовый сдвиг фильтра, причем (αmax+30°)≤ ϕ≤ 150°;
TαH - новое положение управляющего импульса;
150o - максимальный фазовый сдвиг фильтра относительно первичного синхронизирующего напряжения Uсинхр;
αmin,αmax - минимальное и максимальное значение угла управления.
На фиг. 4 представлены диаграммы напряжений, поясняющих способ синхронизации при угле управления преобразователем, равным 60 град.эл. Здесь введены следующие обозначения:
цифрами обозначены включающиеся тиристоры;
Uсинхр - первичное синхронизирующее напряжение;
Uсинхр.ф - синхронизирующее напряжение.
Источники информации, принятые во внимание при экспертизе
1. Заявка ФРГ N 3313949, кл. H 02 P 13/16, от 16.04.1983.
2. Заявка ФРГ N 2941287, кл. H 02 P 13/14, от 11.10.1979.
3. Патент США N 4090116, 318-345Е от 16.05.78.
4. Заявка Англии N 2127630, кл. H 2 F, от 11.04.84; патент США N 4628460, 09.12.86.
5. Авторское свидетельство СССР N 875582, кл. H 02 P 13/24, 27 N 0.81, заявка N 2872066 от 21.01.80
6. Заявка ФРГ N 3412467, кл. H 02 M 1/08, 04.10.84, N 40.
7. Акц. заявка Японии N 57-52784.
8. Энергетическая электроника: Справочное пособие: Пер. с нем. /Под ред. В.А.Лабунцова. - М.: Энергоатом-издат. 1987, 467 с.
9. Патент РФ N 1821878, кл. H 02 M 1/08, от 15.06.93, Бюл. 22.
Изобретение относится к классу цифровых синхронных одноканальных систем управления, построенных по принципу фазового управления, с арккосинусоидальной зависимостью между фазой управляющих импульсов и сигналом управления и предназначено для использования в трехфазных управляемых мостовых выпрямителях с микропроцессорной системой управления, широким диапазоном регулирования углов управления силовых вентилей, включая и условия искажения питающего напряжения. Цель изобретения - улучшение динамических характеристик преобразователя с цифровой системой управления, использующей микропроцессор, расширение возможностей системы для реализации дополнительных средств контроля и автоматики, а также использование разнообразных способов синхронизации системы управления, в том числе и в условиях искажения питающего напряжения. Цель достигается путем параметрического расчета угла управления преобразователем и получения его численного значения с помощью формулы (из выражения его регулировочной характеристики) по значению уставки, по мгновенным значениям входных и выходных параметров преобразователя, других дополнительных параметров, принимаемых в расчет при окончательном определении численного значения угла управления. К таким дополнительным параметрам относятся инерционные звенья в системе цифрового регулирования, величина фазового сдвига синхронизирующего напряжения относительно питающего напряжения. При этом получают прогнозируемое значение угла управления еще до фактического появления соответствующего импульса. 4 ил.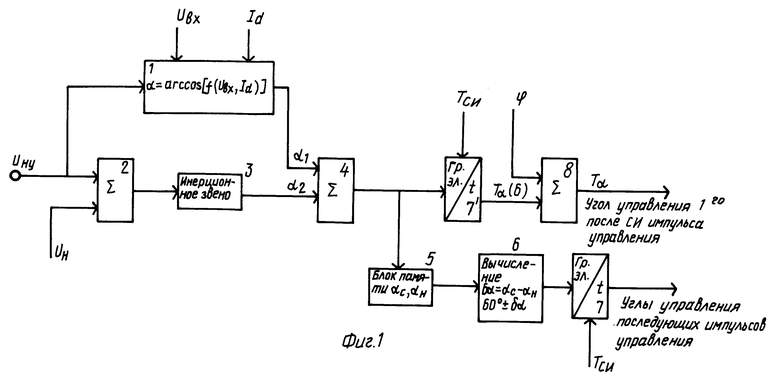
Способ управления преобразователем при помощи микропроцессорной системы, заключающийся в попеременном отпирании вентилей преобразователя путем подачи на них последовательности управляющих импульсов через интервалы времени, определяемые силовой схемой преобразователя, каждый период, определяемый синхронизирующими импульсами, причем время подачи управляющих импульсов на вентили определяют установкой и корректируют в зависимости от величины выходного напряжения и частоты, измеряемой при помощи таймера, отличающийся тем, что дополнительно измеряют мгновенные значения входных параметров преобразователя, по полученным данным циклически рассчитывают соответствующие значения угла управления по формуле регулировочной характеристики преобразователя с учетом инерционных звеньев системы регулирования, фиксируют полученное значение угла в момент поступления очередного синхроимпульса и по этому значению определяют момент подачи первого управляющего импульса с учетом фазового сдвига синхронизирующего напряжения, при этом запоминают каждое рассчитанное значение угла управления, по которому определяют момент подачи очередного управляющего импульса, и положение каждого последующего после первого управляющего импульса корректируют по разности между запомненным предыдущим значением угла управления и вновь рассчитанным.
| GB, заявка N 2127630, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
