Данное изобретение относится к классу цифровых асинхронных одноканальных систем импульсно-фазового управления (СИФУ) и предназначено для использования в трехфазно-трехфазных тиристорных непосредственных преобразователях частоты (НПЧ), построенных на базе трех реверсивных тиристорных выпрямителей с нулевой точкой, для регулирования скорости вращения асинхронных двигателей в подъемно-транспортных механизмах и механизмах центробежного действия.
Наиболее близким аналогом изобретения является способ управления трехфазным мостовым выпрямителем с микропроцессорной системой управления [патент РФ 94025389, кл. Н 02 М 7/12, 05.07.94]. В данном решении формирование импульсов управления (ИУ) осуществляется таймером с помощью которого отсчитывается:
- временной сдвиг первого ИУ после синхроимпульса (СИ) путем первоначальной загрузки в таймер числа, которое определяется по вычисленному (заданному) углу управления;
- временной сдвиг последующих ИУ (до очередного СИ) путем загрузки в таймер числа, определяющегося по разнице между рассчитанным значением угла управления для данного временного интервала и прошлым, использованным для вычисления предыдущего ИУ.
Для учета возможного отклонения частоты питающей сети от номинальной применяется второй таймер (в режиме счетчика), с помощью которого вычисляется временной интервал между двумя соседними СИ (период сетевого напряжения). На основании этого рассчитывается временной интервал первого таймера, приходящегося на единицу электрического градуса, который, в свою очередь, учитывается при определении числа для записи в данный таймер.
Недостатки прототипа следующие:
- сложный математический расчет, связанный с необходимостью определения изменяющегося коэффициента пропорциональности между временным интервалом таймера и вычисленным углом управления и применение функции умножения, что снижает быстродействие системы управления;
- для управления несколькими независимыми тиристорными преобразователями постоянного тока необходимо дополнительно иметь по одному таймеру на каждый преобразователь, что усложняет техническую реализацию и уменьшает быстродействие микропроцессорной системы за счет пропорционального (числу преобразователей) увеличения времени выполнения подпрограмм СИФУ.
Технический результат изобретения - уменьшение затрат времени микропроцессора на обслуживание подпрограмм СИФУ для одновременного управления тремя независимыми тиристорными выпрямителями для реализации НПЧ с помощью одного 8-разрядного однокристального микроконтроллера и, следовательно, повышение быстродействия других частей системы управления; упрощение требований к построению аппаратной части технического устройства.
Поставленная задача решается путем использования одного таймера для управления формированием ИУ всех тиристоров, находящихся в трех выпрямителях, и для автоматической компенсации изменения частоты питающей сети, а также путем упрощения алгоритма работы подпрограммы СИФУ.
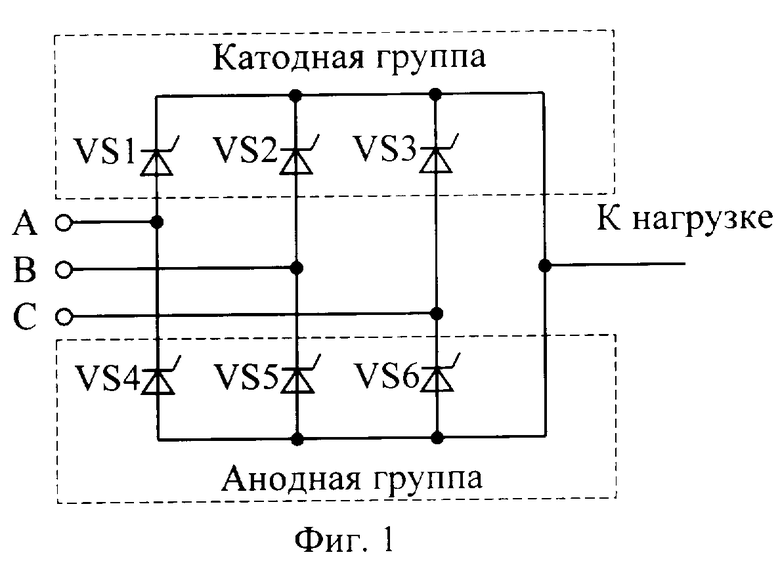
На фиг.1 изображена силовая схема реверсивного тиристорного преобразователя постоянного тока по схеме выпрямления с нулевой точкой, используемого в качестве одного из трех фазных преобразователей в НПЧ;
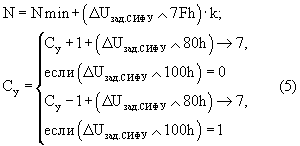
на фиг.2 приведена таблица соответствия между кодом управления и номерами тиристоров, на которые подаются ИУ;
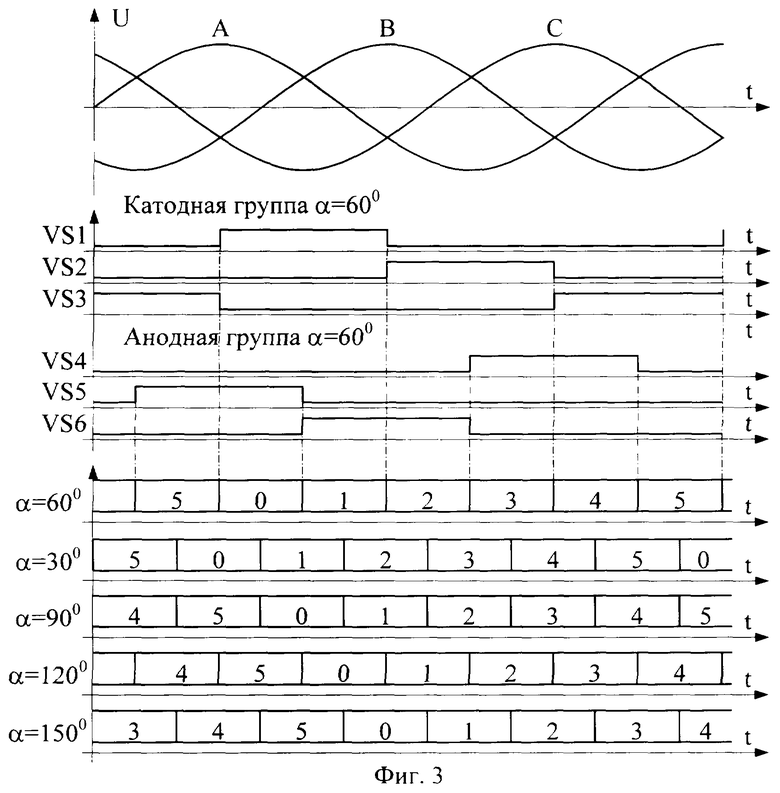
на фиг.3 показано распределение кода управления (КУ) в соответствии с номером включаемого на данный момент времени тиристора и положение КУ во времени в зависимости от требуемого угла отпирания тиристорами;
на фиг.4 показан принцип функционирования подпрограммы синхронизации для одного фазного преобразователя;
на фиг.5 показан принцип функционирования подпрограммы СИФУ для одного фазного преобразователя.
Способ осуществляется следующим образом. Таймер используется для отсчета следующей ближайшей временной точки, при которой происходит прекращение подачи ИУ на одном тиристоре и подача на другой, не обязательно находящейся в этом же выпрямителе. Работа СИФУ разбита на два алгоритма. Выполнение первого алгоритма непосредственно формирует ИУ на тиристоры, рассчитывает следующие моменты смены ИУ по каждому из трех выпрямителей и заполняет таймер числом, необходимым для формирования прерывания обработки основной программы в момент времени, соответствующему ближайшей (в любом выпрямителе) смене ИУ. В момент переполнения таймера формируется прерывание, и выполнение первого алгоритма СИФУ повторяется. Выполнение второго алгоритма синхронизирует работу первого по отношению к сетевому напряжению путем расчета требуемых ИУ и значений таймера на момент синхронизации. Работа первого алгоритма происходит только в моменты смены ИУ, то есть в моменты времени, определяемые прерыванием таймером. Работа второго алгоритма происходит только в моменты синхронизации, которые происходят один раз за период питающего напряжения. Для работы второго алгоритма достаточно иметь информацию о положении одной из трех фаз входного напряжения, либо о положении двух линейных напряжений (как в прототипе). В промежутках времени между вычислениями по алгоритмам СИФУ микропроцессор может выполнять основную программу по управлению электроприводом, причем работа подпрограмм СИФУ не зависит от работы основной программы и происходит без необходимости специального вызова.
Весь период сетевого напряжения разбит на 6 коммутационных интервалов (с номерами от 0 до 5), в каждом из них номера работающих тиристоров не изменяются. Независимо от того, какая группа (анодная либо катодная - фиг.1) находится в данный момент времени в работе, КУ тиристорами не изменен на определенном коммутационном интервале. То есть при КУ равном, например, нулю и при работе катодной группы ИУ подается на тиристор VS1 (фиг.3), а при работе же анодной группы на - VS5. На фиг.3 также показано распределение КУ при различных углах отпирания тиристоров α (при различных кодах задания). Распределение ИУ при различных КУ показано на фиг.2. Число 1 соответствует подаче ИУ, 0 - нет.
Для регулирования диапазона углов отпирания от 30 до 150 электрических градусов (ЭГ) с точностью до 0.5 ЭГ существуют 256 позиций уставки СИФУ. То есть:

Таким образом, код задания на СИФУ Uзад.сифу будет иметь восемь разрядов. Значению 0 будет соответствовать максимальный угол отпирания тиристоров, а значению 255 - минимальный.
Коэффициент передачи СИФУ равен

При необходимости можно расширить диапазон углов отпирания за счет уменьшения минимального угла (меньше 30 ЭГ) и, следовательно, увеличения максимального кода задания Uзад сифу
Максимальные и минимальные значения таймера будут зависеть от его разрядности n (обычно n=8 или n=16), тактовой частоты его заполнения Fтакт и выбранной точности установки угла отпирания Ncифу. Период же переполнения таймера в шесть раз меньше, чем период питающего напряжения. Зависимость между этими параметрами будет иметь следующий вид
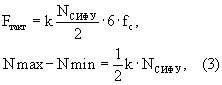
где k - коэффициент масштабирования времени таймера (k=1, 2, 4, 8 и т.д.);
fc - частота питающей сети;
Nmax - максимальное значение таймера (при n=8, Nmax=255; при n=16, Nmax=65535);
Nmin - минимальное значение таймера (для корректного выполнения алгоритма необходимо, чтобы Nmin>0).
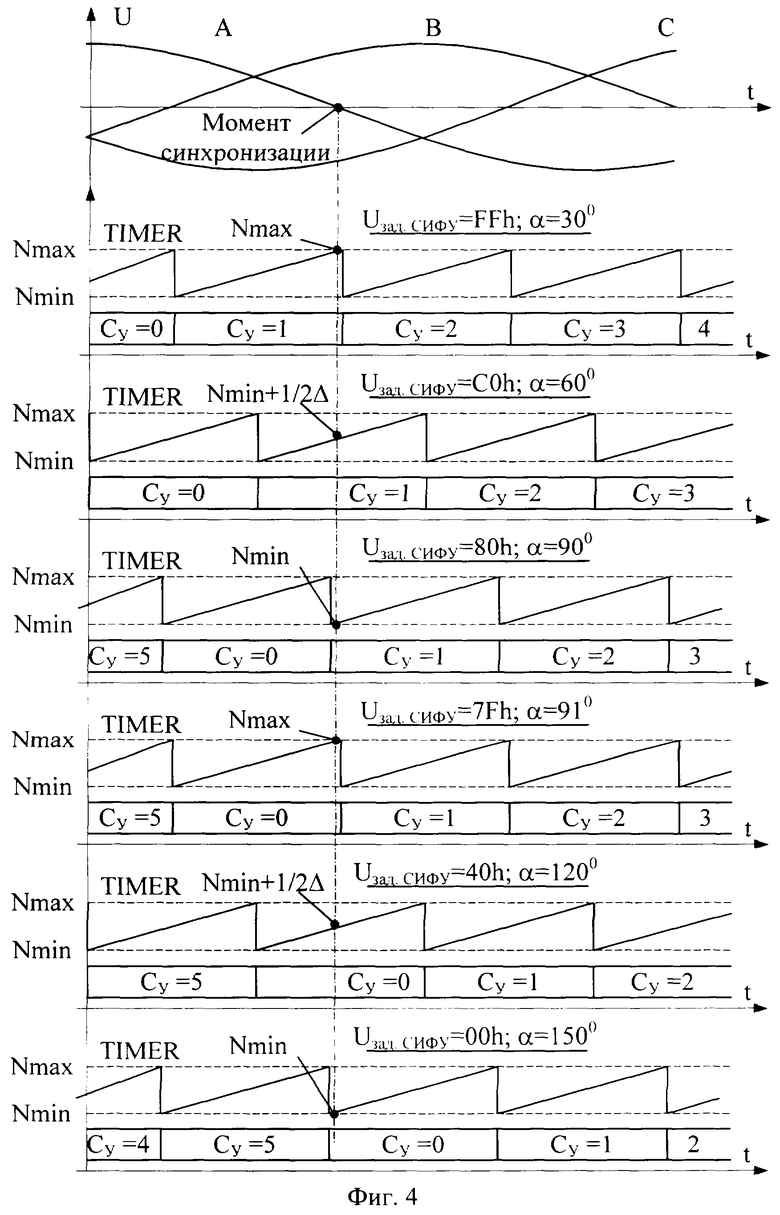
Работа подпрограммы синхронизации для одного выпрямителя показана на фиг.4, где представлены значения таймера и КУ тиристорами на момент синхронизации. Видно, что при изменении Uзад.сифу от 00h до 7Fh (добавка “h” показывает, что число представлено в шестнадцатеричном виде) КУ остается равным 0, при других значениях задания - равным 1. В это же время значение таймера изменяется от минимального до максимального при изменении задания от 00h до 7Fh. В диапазоне кода задания от 80h до FFh величина таймера будет определяться аналогично.
Аналитически зависимость КУ Су и текущего числа заполнения таймера N выражается следующим образом
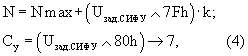
где значком “∧” показана операция логического И;
значком “→x” показана операция битового сдвига числа на х разрядов вправо.
Алгоритм работы подпрограммы синхронизации для трех выпрямителей имеет следующий вид:
1) в момент прерывания по переходу через ноль напряжения фазы А код управления тиристорами для всех трех преобразователей Cy1, Су2, Су3 определяется по 7 биту КЗ Uзад.сифу1, Uзад.сифу2, Uзад.сифу3;
2) рассчитываются числа N1, N2, N3, которые будут зависеть от 0-6 битов кода задания Uзад.сифу1, Uзад.сифу2, Uзад.сифу3 и вычисляться по формуле (4).
3) выставляем КУ в порты ввода - вывода (подаем соответствующие ИУ на тиристоры). Заполняем таймер наибольшим из рассчитанных значений N1, N2 или N3. Остальные сохраняются в оперативной памяти. Число, которым заполняется таймер, также сохраняется в отдельной ячейке Nx.
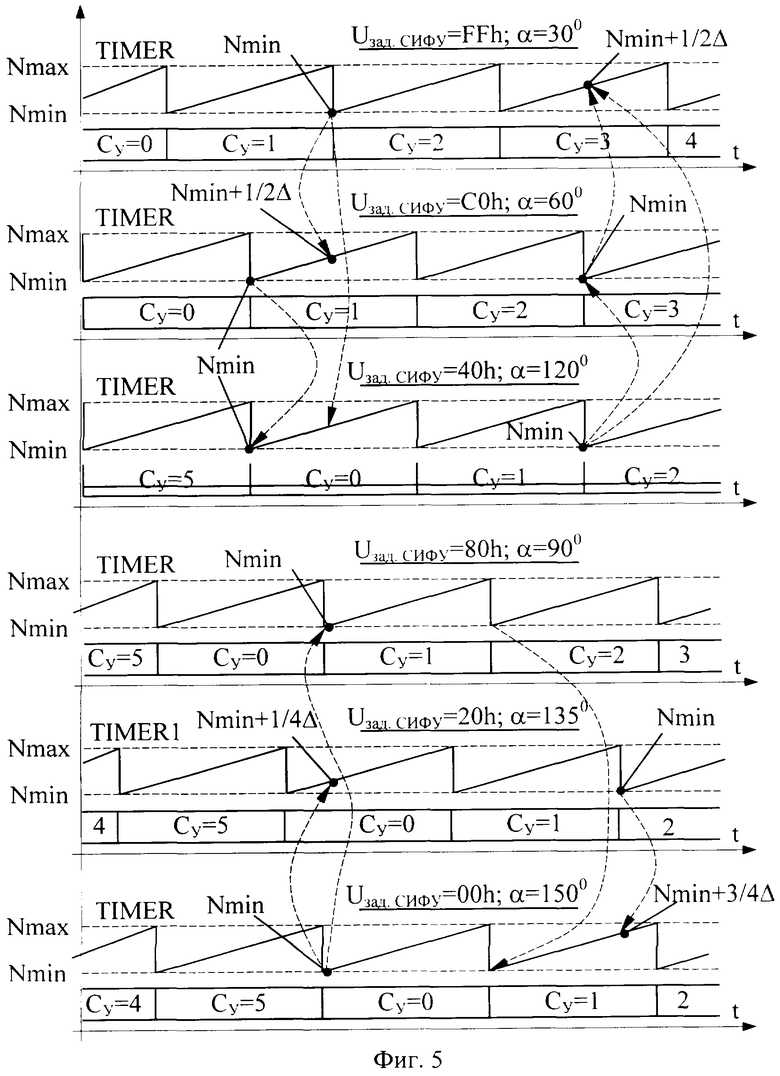
Подпрограмма СИФУ оперирует не абсолютным заданием СИФУ, а разницей между прошлым и настоящим заданием. На фиг.5 изображены изменения КУ и положения таймера при различных заданиях на СИФУ (Δ - разница между максимальным и минимальным значениями таймера). Так как данная подпрограмма вызывается по прерыванию, то все вычисления будут начинаться только при переполнении таймера.
Аналитически зависимости между числом, которым заполняется таймер, КУ и кодам задания представляются следующим образом:
где ΔUзад. СИФУ=Uзад. СИФУ (настоящее) - Uзад. СИФУ (прошлое) – изменение кода задания СИФУ.
Под настоящим заданием на СИФУ подразумевается задание, которое имеет место в данный момент времени (в момент работы подпрограммы СИФУ), под прошлым - задание на СИФУ, которое было в предыдущий вызов подпрограммы)
Алгоритм работы подпрограммы СИФУ для всех трех преобразователей:
1) определяется изменение чисел заполнения таймера (N1, N2, N3), рассчитанные для других выпрямителей (а не для текущего в данный момент выполнения подпрограммы) путем добавления к ним числа Nmax-Nx;
2) в момент прерывания микропроцессора от переполнения таймера рассчитывается разница ΔUзад. сифу между настоящим заданием на СИФУ и прошлым для выпрямителя, который является текущим на данный момент выполнения подпрограммы;
3) определяется следующее значение КУ тиристорами по формуле (5) для текущего преобразователя;
4) вычисляется начальное число, которое необходимо занести в таймер для текущего преобразователя по формуле (5) и запоминаем его в соответствующей ячейке (N1, N2, или N3);
5) выставляется КУ в порт ввода - вывода для соответствующего преобразователя (подаются соответствующие ИУ на тиристоры). Заполняется таймер наибольшим из чисел N1, N2, или N3. В зависимости от того, какое число будет использовано, такой преобразователь и будет текущим для следующего момента выполнения подпрограммы (то есть после прерывания от таймера). Одновременно такое число сохраняется в ячейке Nx;
6) запоминается настоящее задание для текущего на данный момент преобразователя (теперь оно станет прошлым).
Таким образом, для реализации данного алгоритма необходимо:
1) один таймер;
2) четыре ячейки памяти N1, N2, N3, Nx, разрядность которых будет зависеть от разрядности таймера;
3) шесть восьмиразрядных ячеек памяти Uзад. сифу1 (прошлое), Uзад. сифу2 (прошлое), Uзад. сифу3 (прошлое), Uзад. сифу1 (настоящее), Uзад. сифу2 (настоящее), Uзад. сифу3 (настоящее);
4) восьмиразрядная ячейка памяти для сохранения информации о текущем номере преобразователя.
При изменении частоты питающей сети положение в электрических градусах ИУ, последующих за СИ, будет постоянно изменяться даже при неизменном коде задания. То есть при увеличении частоты питания моменты переполнения таймера будет постоянно отставать от положения сетевых синусоид, таким образом действительный угол отпирания будет увеличиваться от одного СИ до другого. В момент прихода очередного СИ значение таймера корректируется и ИУ вновь вернуться на свои места. При уменьшении частоты питания действительный угол отпирания будет уменьшаться.
Для компенсации изменения частоты питающей сети в подпрограмме синхронизации необходимо знать, на сколько не совпадает расчетное по (4) значение таймера на момент синхронизации от действительного. Если в этот момент его величина была меньше расчетной (то есть частота сети становится больше), то необходимо увеличить на единицу начальное число заполнения таймера Nmin, то есть сжимать время между двумя соседними переполнениями таймера. Если в момент прихода СИ действительное значение таймера больше расчетной, то необходимо уменьшать начальное число Nmin, то есть растягивать время между переполнениями. Таким образом, получается астатический контур саморегулирования по частоте входного питающего напряжения.
По сравнению с прототипом данный способ управления тиристорным непосредственным преобразователем частоты при помощи микропроцессорной системы позволяет применить для технической реализации системы управления тремя реверсивными преобразователями постоянного тока один восьмиразрядный однокристальный микроконтроллер небольшого быстродействия (например, типа PIC16), имеющий один встроенный таймер с фиксированной частотой заполнения и не имеющего в списке команд команды умножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| Устройство для управления непосредственным преобразователем частоты | 1988 |
|
SU1669066A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Многофазный непосредственный преобразователь частоты-источник напряжения и способ для его управления | 1978 |
|
SU920986A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
Изобретение относится к классу цифровых асинхронных одноканальных систем импульсно-фазового управления (СИФУ) и предназначено для использования в трехфазно-трехфазных тиристорных непосредственных преобразователях частоты (НПЧ), построенных на базе трех реверсивных тиристорных выпрямителей с нулевой точкой, для регулирования скорости вращения асинхронных двигателей в подъемно-транспортных механизмах и механизмах центробежного действия. Технический результат заключается в уменьшении затрат времени микропроцессора на обслуживание подпрограмм СИФУ для одновременного управления тремя независимыми тиристорными выпрямителями для реализации НПЧ с помощью одного 8-ми разрядного однокристального микроконтроллера и, следовательно, повышении быстродействия других частей системы управления, упрощение требований к построению аппаратной части технического устройства. Поставленная задача решается путем использования одного таймера для управления формированием ИУ всех тиристоров, находящихся в трех выпрямителях, и для автоматической компенсации изменения частоты питающей сети, а также путем упрощения алгоритма работы подпрограммы СИФУ. 5 ил.
Способ управления тиристорным непосредственным преобразователем частоты при помощи микропроцессорной системы, заключающийся в попеременном отпирании тиристоров трех фазных выпрямителей путем подачи на них последовательности управляющих импульсов через интервалы времени, отсчитываемые с помощью таймера, заполняющегося постоянной частотой, каждый период, определяемый синхронизирующими импульсами, причем время подачи управляющих импульсов на тиристоры определяют заданием и корректируют в зависимости от частоты питающей сети и положение первого импульса после синхронизирующего определяют по рассчитанному углу управления, а последующих импульсов корректируют по разнице между запомненным предыдущим значением угла управления и вновь рассчитанным, отличающийся тем, что определяют положения импульсов управления одним таймером для всех трех фазных выпрямителей путем отсчета ближайшего момента времени изменения импульсов управления в любом из трех выпрямителей, корректировку изменения частоты питания осуществляют в моменты синхронизации путем изменения первоначального числа заполнения таймера в зависимости от разницы между текущим на момент синхронизации значением таймера и рассчитанным по заданию.
| RU 94025389 А1, 20.05.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ПРИ ПОМОЩИ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ | 1996 |
|
RU2107982C1 |
| Способ прямого микропроцессорного управления тиристорным преобразователем и устройство для его осуществления | 1991 |
|
SU1838868A3 |
| ГАЗОЖИДКОСТНЫЙ СЕПАРАТОР | 1996 |
|
RU2127630C1 |

