Изобретение относится к системам управления огнем артиллерийских орудий и посвящено совершенствованию приборного комплекса самоходного артиллерийского орудия.
В настоящее время большинство артиллерийских орудий имеет минимальный приборный комплекс, включающий средства связи, прицельные устройства, привода наведения. Такой приборный комплекс орудия предполагает, что основные работы по подготовке орудия к стрельбе выполняет командирская машина старшего офицера батареи (машина управления огнем батареи). В число этих работ входят:
- выбор огневой позиции;
- топогеодезическая привязка и ориентирование орудий на огневой позиции;
- измерение углов укрытия и вычисление наименьших прицелов;
- расчет установок для стрельбы;
- контроль отработанных установок и др.
Учитывая возрастающие требования по улучшению временных характеристик по подготовке и управлению огнем, появление требования автономности ведения орудием боевой работы, определяемой условиями выживаемости орудия в современном бою, приборный комплекс орудия получил значительное развитие. Так, например, минометный транспортер R02003 фирмы Royal Ordnance, Великобритания, со 120-мм казнозарядным минометом оснащен навигационной аппаратурой и баллистическим вычислительным устройством (JDR, 1986, том 19, N 9, с. 1302-1304). Для обеспечения стрельбы по наблюдаемым с точки стояния орудия целям в приборный комплекс орудия включают средства разведки и измерения координат целей, например, 81-мм миномет TMR 81, размещенный на шасси AMX10, имеет, кроме электрического пульта управления с дисплеем и ЭВМ, электроскопический прицел с встроенным лазерным дальномером (JDR, 1988, том 2, с. 935: TBCBKT, 1989 г. вып. 8 (128), с. 19).
Наиболее совершенным техническим решением, принятым за прототип, является самоходный 120-мм миномет фирмы Diehl, Германия, (Wehrtechnik, 1985 г., N 12, с. 70-75; Military Technology, 1986 г., N 3, с. 48), оснащенный приборным комплексом, включающим:
- процессор;
- прибор управления и индикации;
- датчик для определения местоположения (датчик аппаратуры токопривязки);
- гироскопический прибор с ориентацией на север и др.
При этом датчик для определения местоположения и гироскопический прибор размещены в носовой части корпуса базового шасси.
На фиг. 1 дана блок-схема этого самоходного орудия.
Здесь: 1 - датчик для определения местонахождения (аппаратура топопривязки), 2 - гироскопический прибор с ориентацией на север, 3 - прицельное устройство, 4 - лазерный дальномер, 5 - орудие, 6 - привод горизонтального наведения орудия, 7 - привод вертикального наведения орудия, 8 - башня орудия, 9 - бортовая ЭВМ, 10 - датчик угла продольной оси корпуса относительно направления на север, 11 - корпус шасси, 12 - устройство горизонтирования прицельного устройства, 13 - средства связи, 14 - пульт командира с дисплеем, 15 - датчик угла поворота башни относительно корпуса шасси.
Исходя из представленного приборного комплекса и основных положений теории стрельбы зарубежной артиллерии, наиболее вероятен следующий вариант самоходного артиллерийского орудия.
При занятии огневой позиции снимаемые с датчика 1 координаты точки стояния орудия вводят в ЭВМ 9, куда поступает одновременно с датчика 10 угол положения корпуса 11 относительно направления на север, снимаемого с гироскопического прибора 2. Принимаемый по средствам связи 13 от командирской машины управления (КМУ) угол основного направления стрельбы вводят в ЭВМ 9, где он алгебраически суммируется с введенными углами с датчиков углов 10, 15, результат суммирования поступает на отработку в привод горизонтального наведения 6 башни, после сего орудие ориентировано в основном направлении стрельбы. Разворачивая вправо и влево от основного направления стрельбы башню приводом наведения 6, измеряют дальности до гребней укрытий лазерным дальномером 4 и углы укрытий с горизонтированным прицельным устройством 3. результаты измерений в трех направлениях поступают в бортовую ЭВМ 9 для расчета наименьших прицелов. Затем башню возвращают в основное направление стрельбы и развертывание считают законченным. Орудие готово к принятию установок для стрельбы или координат цели, которые после расчета в ЭВМ преобразуются в установки для стрельбы, отрабатываемые приводом вертикального наведения 7 относительно горизонта и привода горизонтального наведения 6 от основного направления стрельбы. Все отрабатываемые углы рассчитывает ЭВМ с учетом углов крена и тангажа, снимаемых с устройства горизонтирования 12.
При стрельбе происходит сбивание как в вертикальной, так и в горизонтальной плоскостях наведения. Для ее восстановления с датчика 10 снимают угол корпуса относительно направления на север, с датчика 15 - угол поворота башни относительно корпуса, производят из алгебраическое суммирование с учетом углов крена и тангажа, алгебраически суммируют с требуемым углом наведения и результат подают в приводы горизонтального и вертикального наведения 6 и 7.
При проявлении цели, наблюдаемой через прицел 3, производят измерение дальности до нее лазерным дальномером 4. Измеренная дальность поступает в ЭВМ 9, где после решения баллистической задачи стрельбы вырабатываются установки для стрельбы, подаваемые в приводы 6 и 7 с возможным визуальным контролем наведения с помощью прицела 3.
Недостатками данного технического решения, принятого за прототип, являются:
- большие времена ориентирования орудия и отработки угла его горизонтального наведения;
- низкая прицельная скорострельность, определяемая значительными временами восстановления наводки в процессе ведения стрельбы;
- невозможность выполнения операции по измерению углов и дальности до гребней укрытий в ночное время.
Целью изобретения являются сокращение времени ориентирования орудия и его наведения и восстановления наводки при стрельбе, улучшение эксплуатационных характеристик и удобства работы, обеспечение возможности выполнения операции по измерению углов и дальностей до гребней укрытий в ночное время.
Цель достигается тем, что в него введена командирская башенка, в которой установлен лазерный дальномер, размещенная на башне, оснащенная датчиком угла поворота командирской башенки относительно башни, сопряженным с бортовой ЭВМ, датчик угла поворота башни относительно корпуса шасси выполнен с двумя выходами, и второй выход подключен ко второму входу аппаратуры для определения местонахождения, а система гироскопического указания размещена в башне орудия, в командирскую башенку введен ночной наблюдательный прибор, смонтированный с лазерным дальномером.
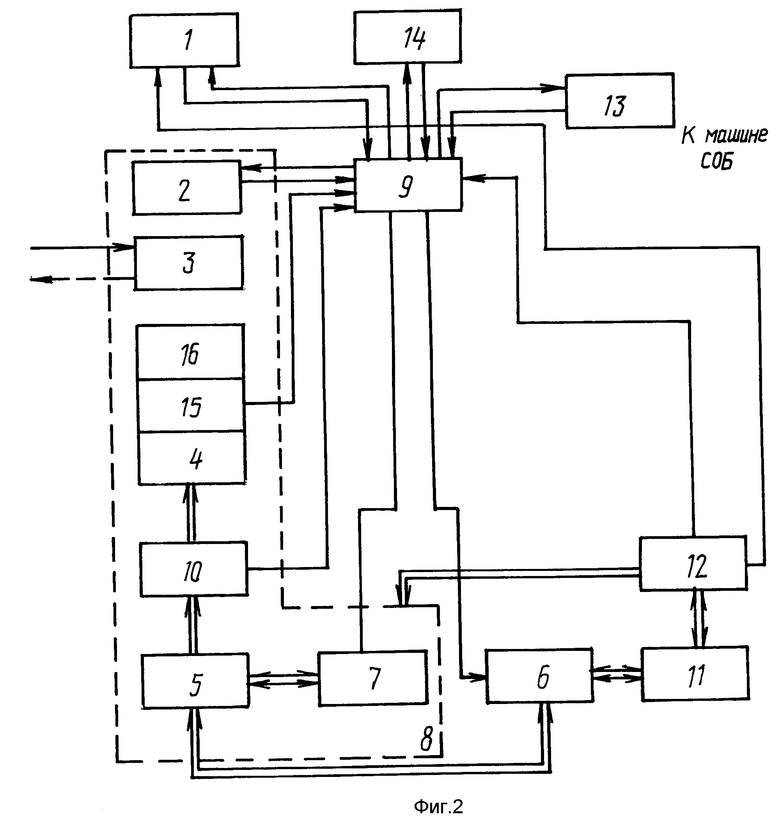
На фиг. 2 дана блок-схема предлагаемого технического решения.
Здесь: 1- аппаратура для определения местонахождения, 2 - система гироскопического указания, оснащенная датчиками крена и тангажа, 3 - прицел, 4 - командирская башенка, размещенная на башне, 5 - орудие, 6 - привод горизонтального наведения орудия, 7 - привод вертикального наведения орудия, 8 - башня, 9 - бортовая ЭВМ, 10 - датчик угла поворота командирской башенки относительно башни, 11 - корпус шасси, 12 - датчик угла поворота башни относительно корпуса шасси, 13 - средства связи. 14 - пульт командира САО с дисплеем, 15 - лазерный дальномер, размещенный в командирской башенке, 16 - ночной наблюдательный прибор, съюстированный с лазерным дальномером и размещенный в командирской башенке.
Аппаратура для определения местоположения 1 включает путевое устройство, в том числе один или несколько датчиков пути, ЭВМ, планшет или курсопрокладчик и др. и работает совместно с системой гироскопического указания, конструктивно выполненной с датчиком крена и тангажа 2. В режиме движения, аппаратуры топопривязки система гироскопического указания выполняет функции курсовой системы, непрерывно измеряющей изменения дирекционного угла и передающей информацию и его направлении в аппаратуру 1, как и в прототипе.
Одновременно с этим в режиме работы на стоянке систему гироскопического указания 2, размещенную в башне 8, используют для разворота башни на заданный угол.
Работа на орудии.
В районе сосредоточения артиллерийской батареи по данным, имеющимся в командирской машине (КМ) старшего офицера батареи (СОВ), в том числе используя, например, гироскопическое средство ориентации, обычно методом взаимного визирования визира КМ СОБ и панорамы прицела 3 орудия 5 ориентируют систему гироскопического указания 2 в заданном направлении (например, в основное направление стрельбы). В аппаратуру по определению местонахождения 1 вводят начальные координаты точки стояния орудия, получаемые с машины СОБ. Далее орудие совершает перемещение в район огневых позиций (ОП). По прибытии на ОП с аппаратуры 1 снимают прямоугольные координаты, которые вводят в ЭВМ 9 и передают по средствам связи 13 в КМ СОБ, обеспечивающую функции контроля. Используя данные, снимаемые с системы гироскопического указания 2, ориентируют орудие 5 в основном направлении стрельбы поворотом башни 8 приводом горизонтального наведения орудия 6. Далее оператор разворачивает командирскую башенку 4 вправо и влево в заданном секторе и измеряет углы и дальности до гребней укрытий с помощью лазерного дальномера 15. Для работы в ночное время обзор гребней укрытий и наведение на цель осуществляют ночным наблюдательным прибором 16, а измерения производят съюстированным с ним лазерным дальномером 15. Измеренные величины вводят в ЭВМ 9, рассчитывающую наименьшие прицелы. Для осуществления контроля полученные данные передают по средствам связи 13 в КМ СОБ, после чего развертывание орудия на ОП считают законченным.
При подготовке к стрельбе на орудие от машины СОБ по средствам связи 13 передают координаты цели, по которым ЭВМ 9, используя информацию о собственном местоположении, рассчитывает установки для стрельбы, учитывая величины наименьших прицелов. Рассчитанные установки для стрельбы с учетом углов крена и тангажа поступают для отработки в приводы горизонтального 6 вертикального 7 наведения орудия 5.
При стрельбе при развороте орудия 5 для восстановления наводки с датчика угла 12 и датчиков углов системы гироскопического указания 2 снимают текущие значения углов, поступающие в ЭВМ 9, где решается задача преобразования координат, и вырабатываемые углы доворота и прицеливания поступают на отработку разворота (сбивания) в приводы горизонтального 6 и вертикального 7 наведения орудия 5.
Цели, находящиеся в прямой видимости с точки стояния орудия 5, разведывают как с помощью прицела 3, как в прототипе, так и лазерным дальномером 15 из командирской башенки 4. В последнем случае при ведении разведки дальномером 15 не происходит сбивания башни 8 с основного направления стрельбы, а оператор может вести разведку целей, независимо вращая командирскую башенку. При наведении дальномера 15 на цель фиксируется дальность до цели и угол направления на цель относительно оси башни 8, снимаемый с датчика угла 10. Измеренные данные вводятся в ЭВМ 9, откуда после решения баллистической задачи стрельбы установки для стрельбы поступают в приводы 6 и 7. Отработав командирской башенкой угол наведения по горизонту оператор лазерного дальномера 15 может наблюдать цель и корректировать результаты стрельбы. Сбивание наводки орудия после выстрела фиксируют датчиком угла 12 относительно заданного направления, поступающего с системы гироскопического указания 2, и отрабатывают приводом горизонтального наведения 6.
Для сокращения времени свертывания орудия после стрельбы для перемещения на новую огневую позицию за счет времени на разворот башни по оси корпуса шасси введена связь датчика угла поворота башни относительно корпуса шасси 12 с аппаратурой для определения местонахождения 1, обеспечивающая учет этого угла при движении путем его алгебраического суммирования с углом, снимаемым с системы гироскопического указания 2.
Предлагаемое техническое решение обеспечивает ведение разведки одновременно двумя операторами в различных секторах. Оператор-наводчик может вести разведку с помощью прицела, вращая приводом 6 башню, оператор-командир орудия, используя командирскую башенку, может вести независимую разведку. Помимо увеличения разведывательных возможностей, это обеспечивает наблюдение и измерение результатов стрельбы через приборы командирской башенки 4 при наведении прицела в упрежденную точку.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1998 |
|
RU2133435C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 1998 |
|
RU2150064C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| СПОСОБ СТРЕЛЬБЫ И КОМПЛЕКС УПРАВЛЕНИЯ ОГНЕМ ТАНКОВОГО ОРУДИЯ | 2006 |
|
RU2349863C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 1996 |
|
RU2102684C1 |
| СПОСОБ МОДЕРНИЗАЦИИ САМОХОДНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2008 |
|
RU2395780C2 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| УСТРОЙСТВО КАНАЛА СТВОЛА СО СПИРАЛЬНЫМИ НАРЕЗАМИ | 1993 |
|
RU2064643C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
Изобретение относится к системам управления огнем артиллерийских орудий и посвящено совершенствованию приборного комплекса самоходного артиллерийского орудия. Для сокращения времени ориентирования орудия и его наведения, восстановления наводки при стрельбе и улучшения его эксплуатационных характеристик, а также обеспечения возможность измерения углов и дальностей до гребней укрытий в ночное время орудие содержит командирскую башенку с лазерным дальномером, установленную на башне и оснащенную датчиком угла поворота, сопряженным с бортовой ЭВМ. Датчик угла поворота башни относительно корпуса шасси выполнен с двумя выходами, и второй выход подключен ковторому входу аппаратуры для определения местонахождения, а система гироскопического указания размещена в башне орудия. В командирскую башенку введен ночной наблюдательный прибор, съюстированный с лазерным дальномером. 1 з.п.ф-лы, 2 ил.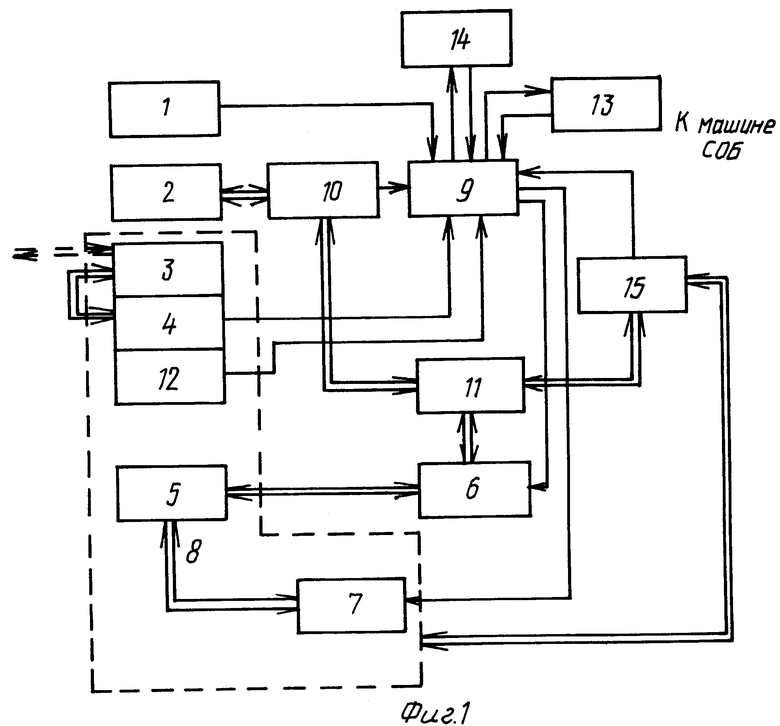
| International Defense Review, Швейцария, 1986, том 19, N 9, с | |||
| Автоматический аэропланный стабилизатор | 1924 |
|
SU1302A1 |
| International Defense Review, Швейцария, 1988, том 2, с | |||
| Прибор для резки лент из резины | 1924 |
|
SU835A1 |
| Техника и вооружение сухопутных войск капиталистических государств | |||
| - М.: ЦНИИинформации, 1989, вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Wehrtechnik, Германия, 1985, N 12, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |

