Изобретение относится к области артиллерийского вооружения, предназначенного для стрельбы с закрытых огневых позиций и посвящено совершенствованию приборного комплекса самоходного артиллерийского орудия.
Учитывая возрастающие требования по улучшению временных и точностных характеристик стрельбы с закрытых огневых позиций, появление требования автономности с закрытых огневых позиций, появление требования автономности ведения орудием боевой работы, определяемых условиями выживаемости орудия в современном бою, приборный комплекс орудия получил значительное развитие.
Так в 120-мм самоходном миномете фирмы Diehl, Германия (Wehrtechnik, 1985 г., N 12, с. 70-75; Military Technology, 1986 г., N 3, с. 48) приборный комплекс наряду с традиционными средствами для стрельбы с закрытых огневых позиций включает:
- процессор;
- прибор управления и индикации;
- датчик для определения местонахождения (датчик аппаратуры токопривязки);
- гироскопический прибор с ориентацией на север и др.
При этом датчик для определения местоположения и гироскопический прибор размещены в носовой части корпуса базового шасси.
Наиболее совершенным решением, более полно реализующим возможности существенно более сложной и дорогостоящей аппаратуры является изобретение "Самоходное артиллерийское орудие" по заявке на изобретение РФ 95110714/09 2108614, C1 (Бюллетень "Изобретения" N 16/97), принятое за прототип.
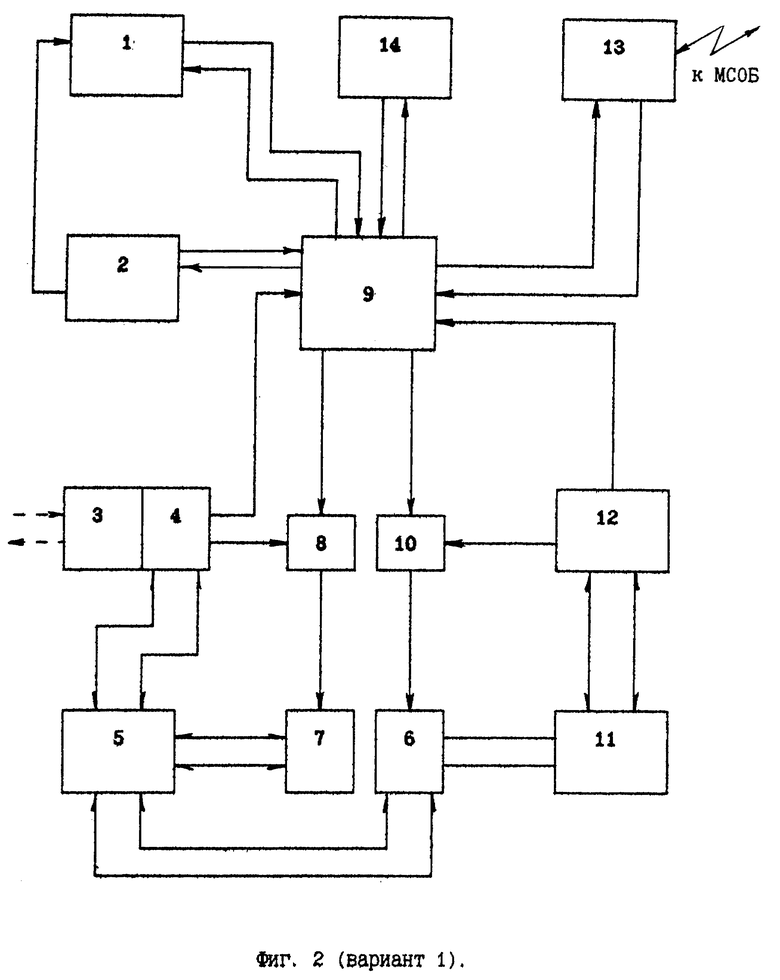
Блок-схема этого самоходного орудия представлена на фиг. 1.
Здесь:
1 - аппаратура для определения местонахождения;
2 - система гироскопического указания, оснащенная датчиками крена и тангажа;
3 - прицел;
4 - командирская башенка, размещенная на башне;
5 - орудие;
6 - привод горизонтального наведения;
7 - привод вертикального наведения;
8 - башня;
9 - бортовая ЭВМ;
10 - датчик угла поворота командирской башенки относительно башни;
11 - корпус шасси;
12 - датчик угла поворота башни относительно корпуса шасси;
13 - средства связи;
14 - пульт командира с дисплеем;
15 - лазерный дальномер, размещенный в командирской башенке;
16 - ночной наблюдательный прибор, сьюстированный с лазерным дальномером и размещенный в командирской башенке.
Бортовая ЭВМ соединена, как это показано на фиг. 1 с системой гироскопического указания и аппаратурой для определения местонахождения двухсторонней связью, а также с приводами вертикального и горизонтального наведения односторонней связью.
Аппаратура для определения местонахождения 1 включает путевое устройство, в т.ч. датчики пути, ЭВМ, планшет или курсопрокладчик и др. работает совместно с системой гироскопического указания 2, конструктивно выполненной с датчиками крена и тангажа. В режиме движения система гироскопического указания выполняет функции курсовой системы, непрерывно измеряющей изменения дирекционного угла и передающей информацию о его значении и направлении в аппаратуру 1. Одновременно с этим в режиме работы на стоянке систему гироскопического указания 2, размещенную в башне 8, используют для разворота башни на заданный угол.
При подготовке к стрельбе на орудие от машины СОБа по средствам связи 13 передают координаты цели, по которым ЭВМ 9, используя информацию о собственном местоположении орудия, рассчитывает установки для стрельбы. Рассчитанные установки для стрельбы с учетом углов крена и тангажа поступают для отработки в приводы горизонтального 6 и вертикального 7 наведения орудия 5.
При стрельбе, при развороте орудия 5 для восстановления наводки с датчика угла 12 и датчиков углов системы гироскопического указания 2 снимают текущие значения углов, поступающие в ЭВМ 9, где решается задача преобразования координат и вырабатываемые углы доворота и прицеливания поступают на отработку разворота (сбивания) в приводы горизонтального 6 и вертикального 7 наведения орудия 5.
Размещение системы гироскопического указания в башне позволяет вырабатывать для системы управления наведения более высокие по точности исходные данные, чем при ее расположении в корпусе шасси.
Недостатками данного технического решения, принятого за прототип, являются:
- низкое быстродействие системы управления наведением;
- недостаточная надежность и точность отработки заданных углов;
- перегрузка ЭВМ задачами работы с приводами наведения.
Это в первую очередь связано с тем, что основные элементы системы управления наведения, предусмотренные прототипом, имеют различное быстродействие (критической является система гироскопического указания) и выдают информацию об углах в различных плоскостях.
Целью настоящего изобретения является повышение точности стрельбы, сокращение времени наведения и восстановления наводки при стрельбе, расширение объема задач, решаемых ЭВМ в процессе стрельбы, повышение надежности работы системы управления наведением и, как результат, повышение эффективности стрельбы.
Поставленная цель достигается тем, что бортовая ЭВМ и привод горизонтальгого наведения соединены посредством электронного сумматора углов по горизонту, причем выход бортовой ЭВМ подключен к управляющему входу электронного сумматора углов по горизонту, второй выход датчика угла поворота башни относительно корпуса шасси подключен ко второму входу электронного сумматора углов по горизонту, а выход электронного сумматора углов по горизонту подключен к входу привода горизонтального наведения. Кроме того, бортовая ЭВМ и привод вертикального наведения соединены посредством электронного сумматора углов по вертикали, причем второй вход электронного сумматора углов по вертикали соединен с выходом датчика вертикальных углов орудия относительно сгоризонтированной части прицела, а второй выход датчика вертикальных углов орудия относительно сгоризонтированной части прицела соединен с входом бортовой ЭВМ, и выход электронного сумматора углов по вертикали подключен ко входу привода вертикального наведения.
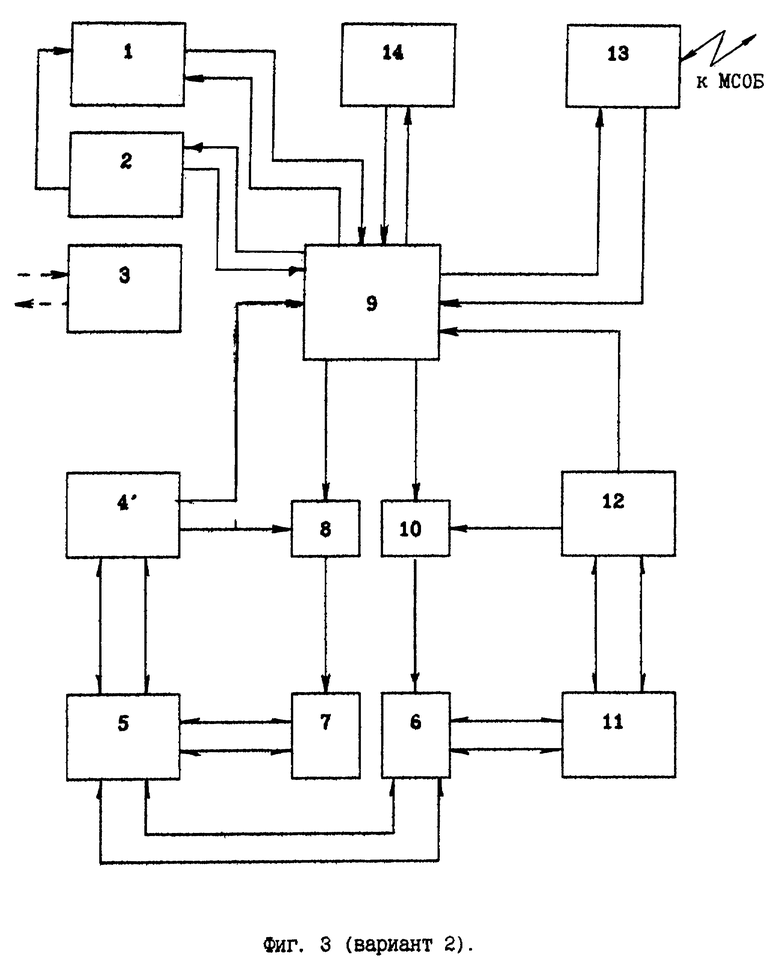
Блок-схема предлагаемого технического решения (вариант 1) представлена на фиг. 2. На фиг. 3 изображен второй вариант предлагаемого орудия. На фиг. 4 изображен третий вариант предлагаемого орудия.
Самоходное орудие в первом варианте содержит:
1 - аппаратура для определения местонахождения;
2 - система гироскопического указания, оснащенная датчиками крена и тангажа;
3 - прицел;
4 - датчик вертикальных углов орудия относительно сгоризонтированной части прицела;
5 - орудие;
6 - привод горизонтального наведения;
7 - привод вертикального наведения;
8 - электронный сумматор углов по вертикали;
9 - бортовая ЭВМ;
10 - электронный сумматор углов по горизонту;
11 - корпус шасси;
12 - датчик угла поворота башни относительно корпуса шасси;
13 - средства связи;
14 - пульт командира с дисплеем.
Система гироскопического указания 2 размещена в башне. В предлагаемом техническом решении может быть использована, как в прототипе командирская башенка со средствами определения углов и дальностей до гребней укрытия (или иное аналогичное техническое решение).
Кроме того, аналогично прототипу, для сокращения времени свертывания орудия после стрельбы для перемещения на новую огневую позицию за счет времени на разворот башни по оси корпуса шасси обеспечена связь датчика угла поворота 12 башни относительно корпуса шасси 11 с аппаратурой для определения местонахождения 1 (эта связь обеспечивается через бортовую ЭВМ 9, т.е. применено эквивалентное прототипу решение, не изменяющее технических характеристик).
Связи бортовой ЭВМ 9 с системой гироскопического указания 2 и аппаратурой определения местонахождения выполнены идентично прототипу, для чего выходы бортовой ЭВМ соединены со входами системы гироскопического указания и аппаратурой для определения местонахождения, информационные выходы которых соединены со входами бортовой ЭВМ.
Работа артиллерийского орудия
При подготовке к стрельбе на орудие от машины СОБа по средствам связи 13 передают координаты цели, по которым бортовая ЭВМ 9, используя информацию о собственном местоположении орудия (координаты места стояния САО по результатам опросам аппаратуры для определения местонахождения 1 и положение орудия относительно направления на север по результатам опроса системы гироскопического указания 2) рассчитывает установки для стрельбы, которые с учетом крена и тангажа поступают в электронные сумматоры углов по горизонту 10 (угол доворота башни относительно корпуса шасси в плоскости погона башни) и вертикали 8 (угол прицеливания относительно плоскости горизонта).
В электронный сумматор по горизонту 10 поступает с датчика угла поворота 12 башни относительно корпуса шасси текущее значение угла поворота башни относительно корпуса шасси 11 в плоскости погона башни, которые сравниваются с заданным углом доворота башни и сигнал пропорциональный углу рассогласования поступает для отработки в привод горизонтального наведения 6. В процессе наведения по горизонту постоянно в контуре управления наведением постоянно задействованы привод горизонтального наведения 6, датчик угла поворота 12 и электронный сумматор.
Бортовая ЭВМ 9 периодически опрашивает систему гироскопического указания 2 и выдает в электронный сумматор 10 новые значения углов доворота башни относительно корпуса шасси и процесс повторяется до наведения орудия в заданное направление по горизонту. Периодичность опроса определяется изменением углов крена-тангажа, которые на финальной стадии наведения (при малых доворотах) практически не влияют на точность наведения по горизонту.
Одновременно с этим в электронный сумматор 8 с датчика вертикальных углов 4 орудия относительно сгоризонтированной части прицела 3 поступает текущее значение угла орудия в вертикальной плоскости, которое сравнивается с заданным углом прицеливания и сигнал, пропорциональный углу рассогласования, поступает для отработки в привод вертикального наведения 7.
В процессе наведения по вертикали в контуре управления постоянно задействованы привод вертикального наведения 7, датчик вертикальных углов 4 орудия относительно сгоризонтированной части прицела 3 и электронный сумматор углов 8. Бортовая ЭВМ при этом выполняет только функции контроля.
Аналогично происходит процесс наведения при сбивании наводки после выстрела.
В результате того, что быстродействие датчиков углов и электронных сумматоров качественно превышают быстродействие системы гироскопического указания (десяток микросекунд и десятки миллисекунд), то существенно повышается быстродействие всей системы управления наведения. Кроме того, как показано выше, бортовая ЭВМ 9 высвобождается для решения других задач. Конструктивно электронные сумматоры 8, 10 могут быть выполнены в виде отдельных электронных блоков или являться самостоятельными частями бортовой ЭВМ. Кроме того при повышении быстродействия системы гироскопического указания не исключается выполнение функций электронных сумматоров на программном уровне ЭВМ, входящей в состав аппаратуры определения местонахождения или любой другой.
Представленное техническое решение является предпочтительным для модернизации или доработки в процессе создания самоходных артиллерийских орудий, уже имеющих в башне автоматически сгоризонтированный прицел для стрельбы с закрытых огневых позиций, бортовую ЭВМ и систему гироскопического указания.
Определенная избыточность предложенной системы управления наведения орудия в таком случае является вынужденной и экономически обоснованной.
При создании новых артиллерийских систем наряду с дальнейшим повышением быстродействия и надежности системы управления наведения орудия ставится цель упрощения системы и сокращение ее стоимости. Поставленная цель достигается тем, что бортовая ЭВМ и привод горизонтального наведения соединены посредством электронного сумматора углов по горизонту, причем выход бортовой ЭВМ подключен к управляющему входу электронного сумматора углов по горизонту, второй выход датчика угла поворота башни относительно корпуса шасси подключен к второму входу электронного сумматора углов по горизонту, а выход электронного сумматора углов по горизонту подключен к входу привода горизонтального наведения, кроме того, на орудии установлен датчик угла поворота орудия вокруг оси цапф относительно корпуса башни, а бортовая ЭВМ и привод вертикального наведения соединены посредством электронного сумматора углов по вертикали, причем датчик угла поворота орудия вокруг оси цапф соединен с электронным сумматором углов по вертикали, выход которого подключен к входу привода вертикального наведения.
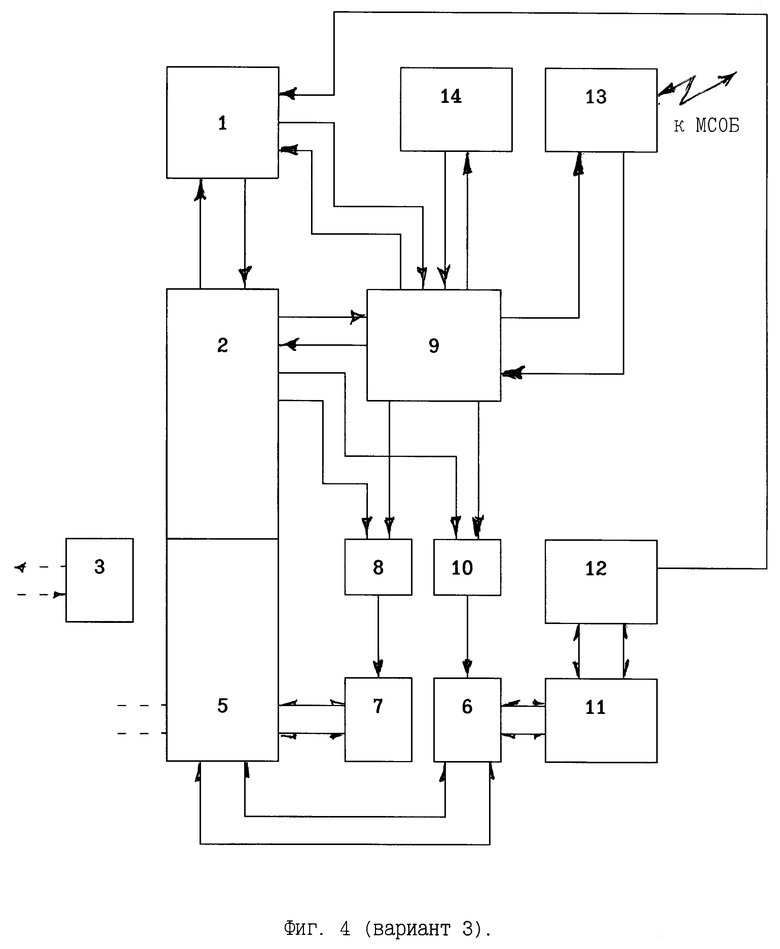
Блок-схема предлагаемого технического решения на фиг. 3.
Здесь:
1 - аппаратура для определения местонахождения;
2 - система гироскопического указания, оснащенная датчиками крена и тангажа;
3 - прицел;
4' - датчик угла поворота орудия вокруг оси цапф относительно корпуса башни;
5 - орудие;
6 - привод горизонтального наведения;
7 - привод вертикального наведения;
8 - электронный сумматор углов по вертикали;
9 - бортовая ЭВМ;
10 - электронный сумматор углов по горизонту;
11 - корпус шасси;
12 - датчик угла поворота башни относительно корпуса шасси;
13 - средства связи;
14 - пульт командира с дисплеем.
В сравнении с вариантом 1 в предложенном техническом решении полностью сохранена подсистема управлением наведением по горизонту, а в подсистему управления наведением по вертикали введен датчик 4' (фиг. 3) угла поворота орудия вокруг оси цапф относительно корпуса башни, исключен датчик вертикальных углов 4 орудия относительно сгоризонтированной части прицела (фиг. 2).
Связи бортовой ЭВМ 9 с системой гироскопического указания 2 и аппаратурой определения местонахождения выполнены идентично прототипу, для чего выходы бортовой ЭВМ соединены со входами системы гироскопического указания и аппаратурой для определения местонахождения, информационные выходы которых соединены со входами бортовой ЭВМ.
В связи с этим работа подсистемы управления наведением по горизонту сохраняется, как и в варианте 1.
Бортовая ЭВМ по вычисленному углу прицеливания с учетом значений углов крена-тангажа орудия, полученных с датчиков системы гироскопического указания 2 определяет угол доворота ствола орудия вокруг оси цапф относительно корпуса башни, который поступает в электронный сумматор углов по вертикали 8. Одновременно с этим с датчика угла поворота 4' орудия вокруг оси цапф относительно корпуса башни в электронный сумматор углов по вертикали 8 поступает текущее значение угла поворота ствола орудия вокруг оси цапф, которое сравнивается с полученным от бортовой ЭВМ. Сигнал, пропорциональный определенному в электронном сумматоре 8 углу рассогласования, поступает для отработки в привод вертикального наведения 7.
В процессе наведения по вертикали в контуре управления наведением постоянно задействованы привод вертикального наведения 7, датчик угла поворота 4' орудия вокруг оси цапф и электронный сумматор 8. Бортовая ЭВМ 9 периодически опрашивает датчики углов системы гироскопического указания 2 и выдает в электронный сумматор 1 новые значения углов доворота ствола орудия вокруг оси цапф относительно корпуса башни и процесс повторяется до наведения ствола орудия по вертикали. Периодичность опроса определяется изменением углов крена-тангажа, которые на финальной стадии наведения (при малых доворотах) практически не влияют на точность наведения по вертикали.
Аналогично происходит процесс наведения при сбивании наводки после выстрела.
Техническое решение, представленное в данном варианте (вариант 2) превосходит вариант 1 по быстродействию, так как исключен достаточно длительный процесс автоматического (и тем более ручного) горизонтального прицела 3.
За чет исключения сложного устройства автоматического горизонтального прицела 3 повышается надежность работы системы управления наведением и сокращается ее стоимость. От прицела 3 для осуществления дублирования должна быть оставлена только самая простая и надежная оптомеханическая часть типа "Панорамы Герца".
Данное техническое решение практически не имеет ограничений по применению и может быть реализовано как на системах с низкой баллистикой (типа упоминаемого 120-мм миномета фирмы Diehl), так и на системах с существенно большими нагрузками (дальнобойные гаубицы калибра 152 - 155 мм и более). При этом обеспечиваются высокие параметры эффективности при стрельбе по площадным (крупноразмерным целям).
Для артиллерийских систем типа 120-мм отечественных самоходных орудий "Нона", предназначенных, в перспективе, в значительной степени для избирательного поражения наиболее важных малоразмерных, высокозащищенных целей требуется существенное повышение точности наведения. Поставленная цель достигается тем, что бортовая ЭВМ и приводы горизонтального и вертикального наведения соединены посредством электронных сумматоров углов по горизонту и вертикали, система гироскопического указания установлена на качающейся части орудия, например, на люльке, причем второй выход системы гироскопического указания подключен ко входу электронного сумматора углов по горизонту, ее третий выход подключен ко входу электронного сумматора углов по вертикали, а выходы электронных сумматоров углов по горизонту и вертикали подключены ко входам приводов горизонтального и вертикального наведения.
Блок-схема предлагаемого технического решения представлена на фиг. 4.
Здесь:
1 - аппаратура для определения местонахождения;
2 - система гироскопического указания;
3 - прицел;
4, 4' - исключены;
5 - орудие;
6 - привод горизонтального наведения;
7 - привод вертикального наведения;
8 - электронный сумматор углов по вертикали;
9 - бортовая ЭВМ;
10 - электронный сумматор углов по горизонту;
11 - корпус шасси;
12 - датчик угла поворота башни относительно корпуса шасси;
13 - средства связи;
14 - пульт командира с дисплеем.
Особенность данного технического решения в том, что система гироскопического указания установлена непосредственно на качающейся части орудия (например, на люльке), тем самым автоматически определяется положение ствола орудия в пространстве, т.е. исключаются промежуточные датчики вертикальных углов 4 (вариант 1), 4' (вариант 2); датчики крена-тангажа. Система гироскопического указания сама по себе является трехмерным датчиком. Сохраняется только датчик угла поворота башни относительно корпуса шасси, необходимый для обеспечения работы аппаратуры местоположения.
Связи бортовой ЭВМ 9 с системой гироскопического указания 2 и аппаратурой определения местонахождения выполнены идентично прототипу, для чего выходы бортовой ЭВМ соединены со входами системы гироскопического указания и аппаратурой для определения местонахождения, информационные выходы которых соединены со входами бортовой ЭВМ.
Бортовая ЭВМ 9, используя информацию о собственном местоположении орудия и координаты цели, полученные от машины СОБа по средствам связи 13 рассчитывает установки для стрельбы (доворот от направления на север по горизонту и угол наведения ствола орудия по вертикали), которые поступают в электронные сумматоры углов по горизонту 10 и по вертикали 8. Туда же поступают текущие значения углов положения ствола по горизонту от направления на север и по вертикали от системы гироскопического указания 2.
Полученные значения углов рассогласования поступают для отработки соответственно в приводы горизонтального и вертикального наведения. В процессе наведения бортовая ЭВМ 9 практически не участвует и ее связь с системой гироскопического указания 2 вызвана необходимостью контроля за правильностью отработки заданных углов наведения.
Наряду с практически полным высвобождением бортовой ЭВМ 9 от задач наведения, повышением надежности за счет сокращения датчиков углов обеспечивается достижение требуемой для поражения малоразмерных, ненаблюдаемых с орудия, целей точности наведения.
Наибольший эффект по точности в данном решении достигается при применении системы гироскопического указания, в основе своей базирующихся на так называемых лазерных гироскопах.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1998 |
|
RU2133435C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| СПОСОБ ПОДГОТОВКИ К СТРЕЛЬБЕ САМОХОДНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2012 |
|
RU2526136C2 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 2003 |
|
RU2245504C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| ЗАТВОР АРТИЛЛЕРИЙСКОГО ОРУДИЯ БЕЗГИЛЬЗОВОГО ЗАРЯЖАНИЯ | 2001 |
|
RU2202083C2 |
| МЕХАНИЗИРОВАННАЯ БОЕУКЛАДКА | 1999 |
|
RU2173827C2 |
| СПОСОБ МОДЕРНИЗАЦИИ САМОХОДНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2008 |
|
RU2395780C2 |
| ФОРТИФИКАЦИОННАЯ УСТАНОВКА | 1992 |
|
RU2079092C1 |
| БОЕВАЯ МАШИНА | 2000 |
|
RU2176372C1 |
Самоходное артиллерийское орудие относится к оборонной технике. Изобретение посвящено совершенствованию приборного комплекса самоходного артиллерийского орудия и содержит три варианта его выполнения. Технический результат - повышение точности стрельбы, повышение быстродействия системы наведения и повышение надежности. В орудии с системой гироскопического указания, размещенной в башне, бортовая ЭВМ и приводы горизонтального и вертикального наведения соединены посредством электронных сумматоров углов по горизонту и вертикали. В первом варианте введен датчик вертикальных углов орудия относительно сгоризонтированной части прицела, соединенный с электронным сумматором углов по вертикали и бортовой ЭВМ. Во втором варианте канал наведения орудия по вертикали содержит датчик угла поворота орудия вокруг оси цапф относительно корпуса башни, соединенный с электронным сумматором углов по вертикали. В третьем варианте система гироскопического указания установлена непосредственно на качающейся части орудия и подключена к бортовой ЭВМ и электронным сумматорам углов по горизонту и вертикали. В первом и втором вариантах датчик угла поворота башни относительно корпуса шасси подключен к бортовой ЭВМ и электронному сумматору углов по горизонту. 3 с.п. ф-лы, 4 ил.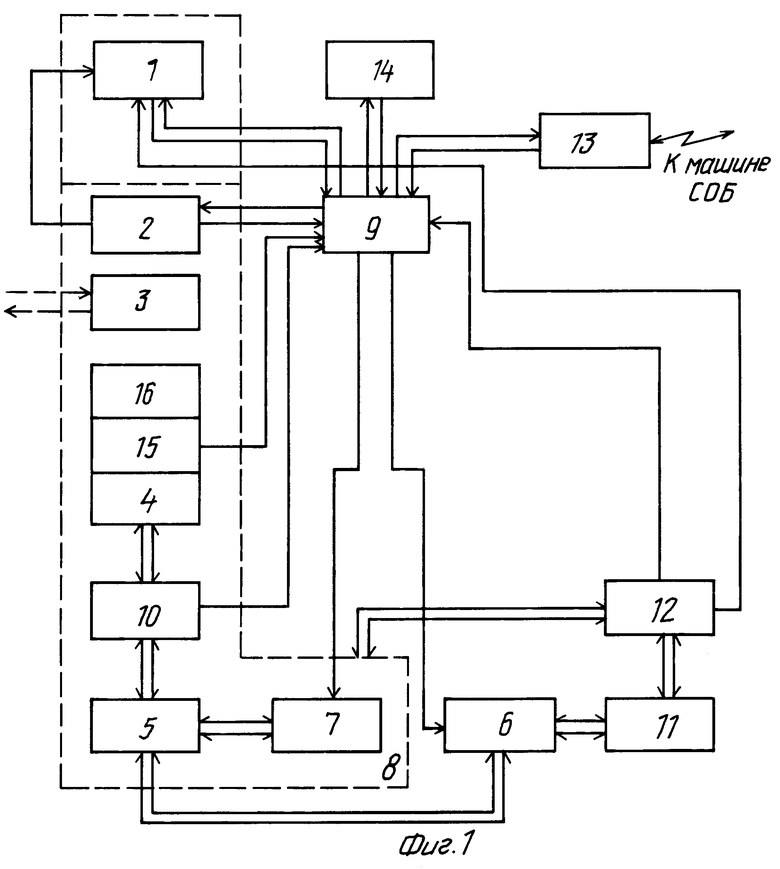
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| БЕСКОНТАКТНАЯ ИНДУКЦИОННАЯ МУФТА | 0 |
|
SU219680A1 |
| US 4387624 A, 14.06.1983 | |||
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |

